QPM模板说明书汇总
- 格式:doc
- 大小:6.94 MB
- 文档页数:11
{ 项目名称} 概要设计说明书版本历史目录1文档介绍 (4)1.1术语与缩写解释 (4)2系统概述 (4)2.1系统概述 (4)2.2系统对外接口 (4)2.3系统设计原则 (4)3系统结构和功能 (4)3.1系统结构图 (4)3.2子系统划分图 (5)3.3各子系统说明 (5)3.3.1 {子系统名}子系统说明 (5)3.3.2 {子系统名}子系统说明 (5)3.3.3 {子系统名}子系统说明 (6)4{子系统名}子系统的结构和功能 (6)4.1动态模型 (6)4.1.1 时序图 (6)4.2静态模型 (6)4.2.1 子系统组件划分 (6)4.2.1.1 组件划分图/类图 (6)4.2.1.2 类图 (7)4.2.1.3 {组件名}组件说明 (7)4.2.1.4 {组件名}组件说明 (8)5{子系统名}子系统的结构和功能 (9)5.1动态模型 (9)5.1.1 时序图 (9)5.2静态模型 (10)5.2.1 子系统组件划分 (10)5.2.1.1 组件划分图/类图 (10)5.2.1.2 类图 (10)5.2.1.3 {组件名}组件说明 (10)5.2.1.4 {组件名}组件说明 (11)附录A:中英文术语对照表 (12)附录B:数据字典 (12)1文档介绍1.1 术语与缩写解释表1术语表2系统概述提示:(1)说明本系统“是什么”,(2)描述本系统的主要功能。
2.1 系统概述2.2 系统对外接口2.3 系统设计原则3系统结构和功能3.1 系统结构图提示:描述子系统和子系统间的相互依赖关系,以图形式表示(包图)。
包图举例如下: 包图:图1系统包图 描述:提示:此处对包图进行描述3.2 子系统划分图图2 子系统划分图3.3 各子系统说明3.3.1{子系统名}子系统说明表2子系统说明3.3.2{子系统名}子系统说明表3子系统说明3.3.3{子系统名}子系统说明表4子系统说明4{子系统名}子系统的结构和功能4.1 动态模型提示:描述{子系统名}子系统内各功能的动态关系(时序图、协作图、状态转换图)。
1概述1.1编写目的[说明编写本测试方案的目的是为软件开发项目管理者、软件工程师、系统维护工程师、测试工程师提供关于XX系统整体系统功能和性能的测试指导.]1.2读者对象[本测试方案可能的合法读者对象为软件开发项目管理者、软件工程师、测试组、系统维护工程师.]1.3项目背景[可以如下那样简单说明,根据项目的具体情况,方案编写者也可以进行详细说明项目名称:XXX。
简称:XXX项目代号:PowerXXX X.0。
0.委托单位:XXX。
开发单位:XX公司主管部门:XXX。
]1.4测试目标[说明进行项目测试的目标或所要达到的目的]1.5参考资料[列出编写本测试方案时参考的资料和文献。
]2测试配置要求xxxxxx2.1网络环境1[在此说明应用系统的网络环境,如果应用系统是网络版的,必须具有本节内容。
]2.1.1网络硬件[此处给出网络硬件的拓扑图、名称、规格、数量、配置等信息。
]2.1.2网络软件[此处给出网络软件的名称、协议、通讯和连接方式等信息。
]2.2服务器环境2.2.1服务器硬件[此处给出服务器硬件的名称、规格、数量、配置等信息。
]2.2.2服务器软件[此处给出服务器软件的名称、协议和版本等信息。
]2.3工作站环境2.3.1工作站硬件[此处给出工作站硬件的拓扑图、名称、规格、数量、配置等信息。
]2.3.2工作站软件[此处给出工作站软件的名称、协议和版本等信息。
]2.4测试手段[在此参照《测试计划》说明测试方法和工具,注明执行测试时,必须同时填写《测试记录表》。
]2.5测试数据[在此简要说明测试数据的形成,如以客户单位具体的业务规则和《XX系统需求分析说明书》,参考《XX系统概要设计说明书》、《XX系统详细设计说明书》和《数据规格说明书》中规定的运行限制,设计测试用例,作为整个XX系统的测试数据。
]2.6测试策略[在此说明测试策略,可以如下这样说明测试过程按三个步骤进行,即单元测试、组装、系统测试,根据不同阶段测试的测重点不同,分别介绍测试策略:A)单元测试首先按照系统、子系统和模块进行划分,但最终的单元必须是功能模块,或面向对象过程中的若干个类。
排队管理系统使用说明书排队管理系统使用说明书 v1.1.0.0项目名称编号拟制排队管理系统版本号审核密级共页批准版本摘要版本发布日期文档相关人员版本说明1.0.0.0 -10-29 初稿1.1.0.0 -11-06广州真卫士数码科技有限公司服务热线:手机:/ 网址:http:// .cn感谢使用巨航无线排队机以下是巨航排队管理系统部分功能调试说明及硬件的基本维护说明,为了让您尽可能的了解排队管理系统的功能,我们在每一项设置功能页面都附上相应操作提示(说明该功能的使用方法),在调试时也可参照软件操作提示使用;为了更好的用户体验,巨航排队管理系统功能在不断的优化与更新,如您在安装与调试的过程中需要提供帮助请与我们联系,我们将为您提供不间断服务!1.快捷安装步骤 (7)1.1.安装取号机顶部天线 (7)1.2.启动取号机 (7)1.3.接上呼叫器电源 (7)1.4.接上LED屏电源 (8)1.5.软件和硬件设置 (9)2.日常使用说明 (10)2.1.如何开机 (10)2.2.呼叫器如何使用 (11)2.3.如何更换打印纸 (12)2.4.数据备份 (12)3.软件设置说明 (13)3.1.取号机 (13)3.2.后台服务 (14)3.3.后台管理 (16)3.4.后台监控 (16)3.5.软件综合屏 (17)3.6.软件显示屏 (18)3.7.软件评价器 (18)3.8.后台管理-业务管理 (19)3.9.后台管理-窗口管理 (21)3.10.后台管理-终端管理 (23)3.11.后台管理-队列管理 (24)3.12.后台管理-用户管理 (25)3.13.后台管理-统计管理 (25)3.14.后台管理-系统设置 (25)A.打印设置 (26)B.取号设置 (26)C.呼叫设置 (28)D.LED设置 (29)E.综合屏设置 (30)F.卡类设置 (30)4.硬件维护说明 (31)4.1.排队机顶部天线的作用 (31)4.2.打印机卡纸是什么原因 (32)4.3.打印机出错是什么原因 (32)4.4.机器起动不了是什么原因 (33)4.5.触摸屏点不动 (33)4.6.呼叫器白屏没有字显示 (33)4.7.LED黑屏了/时显示时不显示/电源灯常亮/LED屏出现坏点 (33)4.8.LED窗口屏不显示号码,只固定在那里,但能叫号 (33)4.9.只能在2米内叫号,超出范围无法呼叫 (33)4.10.取号机不能叫号 (34)4.11.排队机在启动界面蓝屏,系统不能启动 (34)5.系统维护说明 (34)5.1.安装操作系统和驱动(出厂默认安装,请跳过) (34)5.2.准备相关安装文件 (35)5.3.安装相关软件 (35)5.4.进行相关设置 (36)6.技术支持和服务 (37)6.1.需要远程协助怎么操作 (37)6.2.QQ远程服务 (37)1.快捷安装步骤1.1.安装取号机顶部天线打开配件包,找到天线并装上取号机。
1引言增大光学成像系统的景深是应用光学领域的研究方向之一.当前用来增大景深的技术主要集中在波前编码[1]技术.即在普通光学成像系统的孔径光阑处放置一块特殊设计的相位模板对成像光束调制,得到对离焦影响不敏感的图像,然后再经过图像复原处理得到大景深图像.波前编码大景深成像技术具有广泛的应用前景,比如在显微成像系统、安保监控成像系统、机器视觉的成像系统中可以显著增大光学成像系统的景深范围,在空间遥感成像系统中,可以减轻因温度改变、大气干扰等造成的离焦问题,避免设计复杂的温度补偿装置,从而降低系统的结构复杂性以及成本.波前编码技术的两个关键点:一是相位模板的设计;二是图像复原算法的研究.本文针对相位模板进行研究.目前相位模板主要包括以三次方型CPM为代表的非旋转对称型相位模板[1-4],还有以四次相位模板[5]为代表的旋转对称型相位模板[5-6].非旋转对称相位模板一般具有景深增大倍数高的优点,但加工和检测较为困难,此外,一般必须进行图像复原处理之后才能像普通光学成像系统得到的图像一样直接使用.旋转对称型相位模板对应系统的景深增大倍数较小,但是加工和检测相对容易,并且图像传感器上获得的图像可以直接应用而无需图像复原,所以适用于全光型实时大景深成像系统之中.在对旋转对称型相位模板的主要代表QPM进行研究后发现,QPM对应系统的特性随着离焦程度的改变也随着改变.而另一方面,通常希望大景深成像系统在景深范围之内都具有基本一致的成像特性.所以,在QPM的基础之上如何达到上述目的是一个值得研究的内容.本文提出基于两个参数互为相反数的QPM的分区复合方法来达到大景深的目的.2分区复合型QPM 的设计利用非相干光学成像系统的PSF表达式以及稳相法可以推导出四次型圆对称相位模板对应的相位函数表达式[5]为:P(ρ)=exp[jk(aρ4+bρ2)](1)其中,j代表虚数单位,k代表波数.为了简化,我们把表达式中的ka记作α,kb记作β.QPM相位模板对应系统的成像特性具有如下两个特点:一是在景深范围之内不具有较好的一致性,二是当模板参数取相反数时,成像特性是之前特性零离焦的Vol.28No.6Jun.2012赤峰学院学报(自然科学版)Journal of Chifeng University (Natural Science Edition )第28卷第6期(上)2012年6月用于增大景深的四次复合型旋转对称相位模板莫绪涛(安徽工业大学数理学院,安徽马鞍山243002)摘要:旋转对称型大景深相位模板的设计是波前编码大景深成像技术中的关键技术之一.四次方型相位模板(QPM )是旋转对称型大景深相位模板家族中的典型代表.但QPM 对应系统随离焦程度的不同而具有不同的成像特性,即离焦不变性较差.为了在QPM 的基础之上得到具有良好的离焦不变性的相位模板,提出了利用两个互为相反数的QPM 的分区复合得到新相位模板的方法:首先,按照半径等分法或面积等分法将相位模板分成偶数个环形区域,然后,相邻分区相位采用两种不同的QPM 相位函数.系统的幅度传递函数曲线以及幅度传递函数密度图均表明,使用了两种相位模板的成像系统具有良好的离焦不变性.关键词:波前编码;增大景深;相位模板;优化中图分类号:TP391.41文献标识码:A文章编号:1673-260X (2012)06-0012-04基金项目:本文是安徽工业大学青年教师科研基金项目(QZ201116)12--优化处理φmax =10φmax =12QPM半径等分法面积等分法QPM 半径等分法面积等分法f max =0.5X [15.497,-7.961][14,17.675,-0.759][14,52.983,-6.417][16.150,-9.690][14,10.980,-0.430][9,15.725,-0.320]T0.6620.0120.0070.6990.0190.016C-0.002-0.231f max =0.8X [15.233,-10.156][9,11.403,-1.480][13,10.969,-1.311][15.873,-11.913][5,13.663,-1.905][14,21.102,-3.573]T0.7240.0340.0190.7590.1150.024C-2.787-0.472-0.412-4.509-2.967-2.348f max =1.0X [15.613,-13.339][11,12.270,-2.480][15,12.667,-2.444][15.896,-12.487][13,12.114,-0.779][3,14.175,-1.804]T0.6990.0700.0580.8060.0630.252C-7.853-4.847-4.886-11.564-13.176-10.464表1不同景深、空间频率需求时,相位模板对应的优化结果(a)四次方模板(b)模板参数取相反数图1四次方型圆对称相位模板参数取反前后对应系统的MTF密度图镜像.这可以由对应系统的MTF密度图直观说明,如图1所示,横坐标代表离焦参数,纵坐标为归一化空间频率,灰度值代表MTF的响应值.我们一般希望大景深成像系统在景深范围之内具有较好的离焦不变性,同时系统的景深所对应的离焦参量关于零离焦左右对称.如何利用QPM实现上述目标呢?考虑到互为相反数的QPM对应系统特性的对称性,将它们恰当地组合在一起或许可以达到景深范围之内具有离焦不变性的性质,同时满足景深关于零离焦对称.借鉴多环分区型相位模板[7]的设计方法,将相位模板按某种原则分成多个环带区域,相邻环带对应的相位函数参数互为相反数.分区的方法可以有:半径(长度)等分法和面积等分法.新得到的两种相位模板的表达式为:P(ρ)=exp[j(αρ4+βρ2)]x≤ρ(ρ2)<2x+1exp[j(-αρ4-βρ2)]2x+12n≤ρ(ρ2)<x+1nφφφφφφφφφφφφφ(2)式中区间表达式ρ(ρ2)的ρ和ρ2分别代表半径长度等分法和面积等分法.n代表分区参数,相位模板的环带总数为2n,x取整数,x取值范围为[0,n-1].可见,此时的相位模板由三个可变参数控制:分区数n、以及QPM的两个参数α和β.3相位模板的优化及特性研究为了更好地验证模板具有较好的景深延拓特性,首先必须找到合适的模板参数,而模板参数一般而言对应某种系统设计目标.因此,接下来应该建立相位模板的优化模型,并根据成像系统的具体需求得到对应的优化参数.根据大景深优化设计的原则[8],文中采用的优化模型表示为:T(X;fmax,φmax)=φmax-φmax乙|H(f,φ)|-H(f)φφ2dfdφsubjectto:|H(f,φ)|≥VminH(f)=12φmaxφmax-φmax乙|H(f,φ)|dφφφφφφφφφφφφφφφφφφ(3)其中,T(X;fmax,φmax)为优化模型的目标函数,X为相位模板的待优化参数向量,H(f,φ)为系统的光学传递函数(OTF),f为空间频率(对应成像分辨率),φ为离焦参数(φ=kW20),fmax和φmax用来表示系统欲达到的分辨率和景深范围.不同的成像系统对MTF的最小响应值Vmin有着不同的要求,对于机器视觉系统而言一般大于0.05即可,文中采用0.05.13--利用上述优化模型,并就几种常见的系统设计要求,对一般的QPM以及文中给出的改进的两种分区型QPM进行了优化处理,优化结果如表1所示.对于每一种类型的相位模板,对应某种设计要求,优化结果包括三部分:优化参数(表格中的行X),优化目标函数值(表格中的行T),满足限制条件的程度(表格中的行C).其中,QPM对应的X为[α,β],两种分区型QPM对应的X为[n,α,β];优化目标函数值T越小,表明离焦不变性越好;限制条件满足程度参量C越大,表明系统满足限制条件的程度越好,完全满足条件时取值为0.从表1可以看出,两种分区型QPM对应的优(a)QPM(b)半径等分法(c)面积等分法图2相同设计前提下的几种相位模板的MTF曲线(a)QPM(b)半径等分法(c)面积等分法图3相同设计前提下的几种相位模板的MTF密度图及二值化MTF密度图14--化目标函数都小于普通QPM所对应目标函数值,表明了改造后的两种QPM都较原来的QPM具有理想的离焦不变性,进一步比较会发现面积等分法的离焦不变特性要优于半径等分法.限制条件满足程度方面具有类似的结论.从而面积等分法可以作为更理想的相位模板得以应用.为了进一步分析两种分区型QPM对应系统的特性,不失一般性,接下来以fmax=0.8和φmax=10条件下对应的优化模板进行对比研究.对应的MTF曲线和MTF密度图分别如图2、图3所示.从图2可以明显看到,两种分区型QPM的离焦不变性的改善.面积等分法与半径等分法相比,对于高斯物面相同程度的离焦具有更加一致的成像特性.这一点从图3中可以更加明显地看出,因为面积等分法的MTF密度图关于零离焦具有很好的对称性.图3中的二值化MTF密度图,是通过对MTF密度图进行二值化处理得到的,二值化阈值即为优化时所要求达到的最小MTF响应值(文中为0.05),二值化阈值图中的横线代表此时系统要求的归一化频率响应(图中为0.8).从图中可以看出,两种改造后的相位模板对应系统的景深约为原来QPM对应系统景深的2倍.4结论通过将互为相反数的两个四次方型相位模板按照半径等分法和面积等分法得到两种不同的新的旋转对称型相位模板,数值分析结果表明,两种相位模板都比原来的相位模板具有更好的离焦不变性、景深增大倍数,同时也能够更好地满足系统在景深范围之内对MTF的响应要求.更进一步来说,面积等分法得到的相位模板对于零离焦前后相同程度离焦具有一致的成像特性.———————————————————参考文献:〔1〕Dowski E R,Cathey W T.,Extended Depth of Field through Wave-Front Coding[J], Applied Optics,1995,34(11):1859~1866.〔2〕Yang Qingguo,Liu Liren,Sun Jianfeng, Optimized phase pupil masks for extended depth of field[J],Optics Communications, 2007,272(1):56~66.〔3〕Sherif S.Sherif,W.Thomas Cathey,Ed R.Dowski,Phase plate to extend the depth of field of incoherent hybrid imaging systems[J],Applied Optics,2004,43(13):2709~2721.〔4〕Hui Zhao,Yingcai Li,Optimized sinusoidal phase mask to extend the depth of field of an incoherent imaging system[J],OPTICS LETTERS,2010,35(2):267-269.〔5〕S.Mezouari,A.R.Harvey,Phase pupil functions for reduction of defocus and spherical aberrations[J],OPTICS LETTERS,2003,28: 771–773.〔6〕Feng Zhou,Ran Ye,Guangwei Li,Haitao Zhang,Dongsheng Wang,Optimized circularly symmetric phase mask to extend the depth of focus[J],J.Opt.Soc.Am.A,2009,26(8): 1889-1895.〔7〕莫绪涛,刘文耀,王晋疆.大景深光学成像系统关键技术的研究[J].光电工程,2007,34(12):129-133.〔8〕莫绪涛,刘文耀,王晋疆.大景深相位模板的个性化设计[J].光电工程,2008,35(5):85-88.15--。
晶圆bpm管理平台软件说明书湖南大学信息科学与工程学院2012年5月文档控制修改记录* 修改类型分为 a—addedm—modifiedd—deleted审阅人目录1 概述 (4)1.1背景......................................................... 4 1.2应用领域与使用对象........................................... 4 1.3参考资料.. (4)2 系统综述 ...................................................... 4 2.1系统功能简介................................................. 4 2.2系统结构.. (4)3 功能列表 ...................................................... 5 3.1功能结构..................................................... 5 3.2课程设置..................................................... 5 3.3日程管理..................................................... 6 3.4任务列表..................................................... 7 3.5 笔记记录.................................................... 7 3.6教师信息管理. (8)1 概述1.1背景为了提高大学生学习、工作效率,高效管理课程、任务、笔记、教师信息。
1.2应用领域与使用对象所有在校大学生。
全套PMM模板及使用说明简介本文档提供了全套PMM(项目管理方法)模板以及使用说明,旨在帮助项目经理有效管理项目、优化流程并提高团队成果。
PMM模板列表以下是PMM模板的详细列表:1. 项目计划模板2. 项目范围模板3. 项目进度模板4. 项目成本模板5. 风险管理模板6. 沟通管理模板7. 质量管理模板使用说明导入模板1. 打开项目管理工具(如Microsoft Project)。
2. 在工具中选择“导入”或“打开”选项。
3. 浏览文件夹并选择所需的PMM模板文件。
4. 点击“确定”或“打开”按钮导入模板。
自定义设置1. 打开导入的PMM模板。
2. 根据项目需求,修改项目计划、范围、进度、成本等相关信息。
3. 添加/删除任务、设置任务优先级、分配资源等。
4. 根据项目团队的沟通需求,调整沟通管理模板。
5. 完成自定义设置后,保存模板。
使用模板1. 在项目开始前,根据项目情况选择合适的PMM模板。
2. 打开所选模板并根据实际情况进行调整。
3. 将项目相关信息填入模板中,包括项目计划、范围、进度、成本、风险和沟通等。
4. 定期更新和管理模板,及时反映项目进展和变化。
5. 根据模板生成报告和图表,评估项目绩效和风险。
注意事项1. 在使用PMM模板前,请确保了解项目管理方法的基本原理和概念。
2. 根据具体项目的要求,灵活调整和定制PMM模板。
3. 定期备份模板,以防丢失或损坏。
4. 模板仅为辅助工具,项目经理应结合实际情况进行判断和决策。
希望本文档能为您提供全套PMM模板的详细说明和使用指南,帮助您更好地进行项目管理。
如果您对PMM模板有任何疑问或需要进一步的帮助,请随时与我们联系。
1 简介液压自爬模的动力来源是本身自带的液压顶升系统,液压顶升系统包括液压油缸和上下换向盒,换向盒可控制提升导轨或提升架体,通过液压系统可使模板架体与导轨间形成互爬,从而使液压自爬模稳步向上爬升,液压自爬模在施工过程中无需其它起重设备,操作方便,爬升速度快,安全系数高。
是高耸建筑物施工时的首选模板体系。
液压自爬模主要分为以下四部分(如图1):图1 总装图1.1 模板系统:1.2 埋件部分:1.3 支架系统:主要由承重三角架、后移装置、中平台、吊平台、导轨、附墙装置、桁架支撑系统组成。
1.3.1 后移装置:1.3.2 承重三角架总成1.3.3 中平台:1.4 液压系统:主要有液压泵站控制台、液压油缸、同步阀、胶管、液压阀和配电装置。
2 液压自爬模的安装过程2.1 准备两片木板300mmx2440mm左右,按照爬锥中到中间距摆放在水平地面上。
保证两条轴线绝对平行,轴线与木板连线夹角90°,两对角线误差不超过2mm。
将三角架扣放在木板轴线上,保证三角架中到中间距等于爬第一次浇筑爬锥中到中间距。
两三角架对角线误差不超过2mm,安装平台立杆,用钢管扣件连接。
两三脚架间同样用钢管扣件连接。
注意加斜拉钢管(如图2)。
图2 拼三角架2.2 安装平台板,平台要求平整牢固,在与部件冲突位置开孔,以保证架体使用,并再次校正两三角架中道中间距是否为第一次浇筑爬锥中到中间位置(如图3)。
图3 安装平台2.3 将拼好的架体整体吊起,平稳挂于第一次浇筑时埋好的受力螺栓(挂座体)上,插入安全插销(如图4)。
图4 吊装三角架2.4 拼装桁架、安装所有操作平台。
先在模板下垫四根木梁,然后在模板上安装主背楞、斜撑、挑架,注意背楞调节器与模板背楞的支撑情况,安装背楞扣件,用钢管扣件将挑架连接牢固,注意加斜拉钢管。
斜撑用铁丝和模板背楞绑在一起,防止在吊起过程中晃动。
平台要求平整牢固,在与部件冲突位置开孔,以保证架体使用(如图5)。
amqp php扩展使用手册1. 简介AMQP(高级消息队列协议)是一种用于消息传递的开放标准协议。
它为分布式系统中的应用程序提供了一种异步通信机制,使得不同的应用程序可以通过消息中间件进行交互。
这样的架构可以提高系统的可伸缩性和可靠性。
AMQP PHP扩展是一个用于在PHP应用程序中使用AMQP协议的工具。
它提供了一套方法和类,可以方便地创建和管理AMQP连接、交换机、队列和消息等。
2. 安装要使用AMQP PHP扩展,首先需要确保已经安装了AMQP客户端库。
可以通过以下命令在Linux系统中安装AMQP客户端库:```sudo apt-get install librabbitmq-dev```接下来,可以通过以下命令来安装AMQP PHP扩展:```pecl install amqp```安装完成后,需要在php.ini文件中添加扩展的配置,可以使用以下命令编辑php.ini文件:```sudo nano /etc/php/7.2/cli/php.ini```在文件的末尾添加以下内容:```extension=amqp.so```保存并退出文件,重新启动PHP服务,AMQP PHP扩展就可以使用了。
3. 连接到消息代理服务器在使用AMQP PHP扩展之前,必须先建立与消息代理服务器的连接。
可以使用下面的代码示例来创建一个连接:```php$connection = new AMQPConnection(['host' => 'localhost','port' => 5672,'vhost' => '/','login' => 'guest','password' => 'guest']);$connection->connect();```在这个示例中,我们使用默认的主机、端口、虚拟主机和登录凭据来创建连接。
文件编号:SMSI-DEVC-WORKROUTE-2010304级别:□公司级■部门级□项目级□普通级采纳标准:CMMIQTP使用手册V1.0.0作者:伟Fujian Sinomyth System Integration CO.,LTD鑫信迈()系统集成所有1、QTP介绍了解一下QuickTest的主界面:在QTP界面包含标题栏、菜单栏、文件工具条等几个界面元素,下面简单解释各界面元素的功能:●标题栏,显示了当前打开的测试脚本的名称。
●菜单栏,包含了QuickTest的所有菜单命令项。
●文件工具条,在工具条上包含了以下几个按钮:●测试工具条,包含了在创建、管理测试脚本是要使用的按钮,如下图:●调试工具条,包含在调试测试脚本时要使用的工具条,如下图:●测试脚本管理窗口,提供了两个可切换的窗口,分别通过图形化方式和VBScript脚本方式来管理测试脚本。
●Data Table窗口,用于参数化你的测试。
●状态栏,显示测试过程中的状态。
2、录制/执行测试脚本录制运行设置(一)1. 录制前IE设置* 确保你的IE运行正常依次点击菜单查看——> 工具栏,一定要将上网助手等插件卸载掉,如一些拦截广告的软件* 修改浏览器的设定,不让浏览器帮你自动输入和密码,确保所有操作都会录制下来。
取消[自动完成]的设定(1). 开启IE浏览器,点选[工具]-〉[Internet选项]-〉[容](2). 点选个人信息中的[自动完成],进入自动完成设置。
(3). 取消[表单上的用户名和密码]选项(4). 点选确定,关闭对话框如下图:●选择“Tutorial”将打开 QTP 的帮助文档●选择“Start Recording”进入测试录制功能●选择“Open Existing”将打开现有的测试项目文件●选择“Blank Test”将创建一个空的测试项目Ps:把“show this screen on startup”设置为不勾选,则下次启动 QTP 时不显示该界面,而是创建一个空的测试项目。
Display Equipment Specification ManualBooker Group PLC & Booker Retail Partners (GB) Ltd, (Booker) have taken control over store standards by specifying the use of Eden, SURE & SUREPLUS products in all new stores and re-fits.Booker & Shopfitters requiring extra items for shelving systems supplied in the past are, of course, free to add matching equipment to existing stores.Booker RDMs & Planners are to place orders with Sure Retail Equipment Ltd through Central Billing.Shopfitters are to place their orders with Sure Retail Equipment Ltd.1. Retailers are all to be given maximum benefit of Booker Group Buying power by using the Central Billing.2. Booker Retail Development Planners to prepare store plans for new stores and re-fits working to the Booker Specification Manual.3. For the retailer to benefit from Booker Group buying power: Booker Specification store plan or completed order form to be sent to *************.com with the retailers central billing reference number, store number, postal address & required delivery date.4. Any orders placed with SURE are processed through central billing.SpecificationColour RAL 9006 Silver50mm Pitch Eden Shelving Epos Height 4cmDescription Axial Distance L66.65666.5mmL80800mmL1001000mmL1251250mm•Maximum bay width is L100 (1000mm) for the timber slat panel• Maximum height is H241 (2410mm)•Fitters required to cut slatwall panel down on site and supply own screws to fix slatwall panel to the timber back panel claws• Number of buckets to be as per clients requirement•Galvanised bucket include ‘spider ’ which is designed to housea supplier given bucket• Optional graphics headers available from stock •Gondola Cover OptionalAs specified by• Unique no-knock up design for added peace of mind• Utilises standard Eden shelving for a cost effective solution • Can be used with oak slotted shelves available as standardAs specified by• Unique support bar design allows use of timber shelves whilst incorporating standard Eden brackets• Oak slotted shelves available as standard• Compatible with standard Sure & Eden risers and dividers • Install with fruit and veg brackets for an increased stock holdingAs specified bySUREPLUS® Free Standing Display Unit is a compact and modular unit. Steel base with clear high impact acrylic side panels and shelves for product clarity and rigidity.• The SURETOWERS® free standing display unit is a versatile unit that allows for extra merchandising space, yet requires minimal floor space.• Flat pack design means lower delivery costs.• No tools required to build, less time on site thus reducing costs. • SUREPLUS® clip & keyhole fixtures for simple and quick assembly.• SUREPLUS® feature a boltless locking steel base for stability. • Shelves can be flat or angled (10cm pitch) to display your product perfectly!• Clear sides unit for clarity of product and durability.• Optional graphic holders available to help promote your product further.Find out more; Click HereAs specified bySUREPLUS® 8 Title Double News Tower is a mobile unit for easy placement in stores. Steel base with clear high impact acrylic side panels and shelves for product clarity and rigidity. Key Features• Mobile unit• Includes shelf dividers • Graphic options available• SUREPLUS® clip & key fittings• High impact acrylic panels and shelves for clarity and rigidityAs specified bySUREPLUS® 15 Title Criss Cross News Tower is a mobile unit for easy placement in stores. Steel base with clear high impact acrylic side panels and shelves for product clarity and rigidity. Key Features• Mobile unit• Extremely compact display • Graphic options available •SUREPLUS® clip & key fittings• High impact acrylic panels and shelves for clarity and rigidityAs specified bySUREPLUS® 16 Title News Tower Quad is a mobile unit for easy placement in stores. Wooden base with high impact edging to minimise wear and tear. Clear high impact acrylic side panels and shelves for product clarity and rigidity.Key Features• Mobile unit• Graphic options available• Suitable for 8 tabloid and 8 broadsheet newspapers• Impact resistant PU edged wooden base• SUREPLUS® clip & key fittings• High impact acrylic panels and shelves for clarity and rigidityAs specified bySUREPLUS® Confectionery Counter Unit is designed to fit securely into a checkout counter. It has clear high impact acrylicside panels and shelves for product clarity and rigidity.Key Features• Designed to be screwed to counter• Promotes last minute impulse buys• Includes shelf dividers• SUREPLUS® clip & key fittings• High impact acrylic panels and shelvesAs specified bySUREPLUS® Circular Display Tower is a rounded unit to fill any extra floor space to increase store revenue. It has wooden shelves for rigidity and wire risers for product visibility.Key Features• Rounded for aesthetics• Chromed wire riser• A4 graphics header addedAs specified bySUREPLUS® Crisp Bays Features multi-angled brackets that opti-mise front facing products. Clear PETG shelves are used for clarity and durability.Key Features• Multi-angled brackets• Fits 50mm pitch systems• Clear PETG shelves for clarity and durability• SUREPLUS® clip & key fitting• 18cm riser to secure merchandise• Shelf dividers can be added• Optional SUREPLUS® Magnetic LED Lighting availableAs specified bySUREPLUS® Flexi Bays feature multi-angled brackets that opti-mize front facing products. Clear PETG shelves are used for clarity and durability.Key Features• Multi-angled brackets• Fits 50mm pitch systems• Clear PETG shelves for clarity and durability• SUREPLUS® clip & key fitting• 9cm riser to secure merchandise• Shelf dividers can be added• Optional SUREPLUS® Magnetic LED Lighting availableAs specified bySUREPLUS® Magazine Bays features multi-angled brackets that optimise front facing products. Clear PETGs shelves are used for clarity and durability.Key Features• Multi-angled brackets• Fits both 25mm and 50mm pitch systems• Clear PETG shelves for clarity and durability• SUREPLUS® clip & key fitting• Bulk shelf options available• Shelf dividers are included• Optional SUREPLUS® Magnetic LED Lighting availableAs specified bySUREPLUS® News Display features multi-angled brackets that optimise front facing products. Clear PETGs helves are used for clarity and durability.Key Features• Multi-angled brackets• Fits both 25mm and 50mm pitch systems• Clear PETG shelves for clarity and durability• SUREPLUS® clip & key fitting• Shelf dividers are included• Optional SUREPLUS® Magnetic LED Lighting availableAs specified bySUREPLUS® Card Bays features slimline tiered shelves to maximise merchandisingspace and visibility. Clear PETG shelves are used for clarity and durability.Key Features• 3 & 6 tier brackets are multi-angled. 10 & 15 tier brackets are secured into the base • Clear PETG shelves for clarity and durability• SUREPLUS® clip & key fitting• Shelf dividers can be added• Optional SUREPLUS® Magnetic LED Lighting availableAs specified byAs specified byAs specified byFloor Plinth for stackingRidge TrayPeg hook euro with overarm Slat hook euro with overarmAs specified byCode DescriptionSRE-553-DIVD-D47H9.5ACRYLIC DIVIDER D47 H7.5SRE-553-DIVD-D37H9.5ACRYLIC DIVIDER D37 H7.5SRE-553-DIVD-D30H9.5ACRYLIC DIVIDER D30 H7.5SRE-553-DIVD-D57H9.5ACRYLIC DIVIDER D57 H7.5As specified byAs specified by4 Uppers5 Uppers6 Uppers4 Uppers5 Uppers6 Uppers7 Uppers31All Sure Retail Equipment Limited designs are protected by copyright, unregistered design right and/or other IP rights. Sure Retail Equipment limited © 2019 Thank You for Reading.If you have any questions please let us know.SureDesign is part of Sure Retail Equipment Ltd. We aim to maximise our clients revenue by designing, developing and delivering retail equipment in conjunction with Sure and SurePlus to provide you with the best possible service.。
qpm 量-回复什么是QPM量?QPM量,全称为Question Per Minute,指的是每分钟的问题数量。
这个度量指标常用于衡量一个发言者或讲者在演讲、演示或教学过程中提问的频率和质量。
QPM量能够反映发言者与观众之间的互动程度,提供参与度的指标,并且对于演讲的效果和吸引力有一定的影响。
为什么要关注QPM量?关注QPM量对于提高演讲、演示或教学的效果非常重要。
高质量的问题能够激发学习者的思考和互动,增强他们对主题的理解和记忆。
此外,适度的提问可以增加听众的参与度和兴趣,使演讲更加生动和引人入胜。
因此,通过关注和提高QPM量,可以提高演讲者的表现和与听众的互动,达到更好的教学效果。
如何提高QPM量?提高QPM量需要考虑以下几个方面:1.准备充分:在演讲或教学前,对主题进行充分的研究和准备。
掌握足够的知识和信息,使自己有能力回答听众可能提出的问题。
2.设定目标:在开始演讲或教学之前,明确自己的目标。
设定每分钟提问的数量,并尽量达到或超过这个目标。
这样可以提醒自己时刻保持互动。
3.多样化问题类型:提出不同类型的问题,如开放性问题、封闭性问题、引导性问题等。
多样化的问题类型能够激发听众的思考和参与,增加互动效果。
4.注意问题质量:提问不仅关乎数量,更重要的是问题的质量。
确保问题有针对性、具有挑战性和启发性,并能够引导听众深入思考和理解。
5.灵活应对:根据听众的反应和表现,灵活调整提问的数量和频率。
如果听众反应积极,可适当增加提问的数量;如果听众反应较差,可以适度降低提问的频率,给予他们更多的思考时间。
通过以上几个方面的努力,可以有效提高QPM量,增加演讲者与听众之间的互动,提高教学的效果。
QPM量的质量与影响力如何评估?QPM量的质量和影响力可以从以下几个方面进行评估:1.回答率:考察能否及时回答提出的问题。
有效回答问题的能力可以展示演讲者的专业知识和能力,体现其对主题的熟悉程度。
2.质量和深度:评估提出问题的质量和深度。
完美WORD格式上海晶中信息技术有限公司晶中智云保险电子商务云服务平台业务组件研发详细设计说明书后台管理系统分册完美WORD格式上海晶中信息技术有限公司晶中智云保险电子商务云服务平台业务组件研发详细设计说明书后台管理系统分册上海晶中信息技术有限公司修订历史目录1. 需求概况 (5)1.1. 总体概述 (5)1.2. 管理范围 (5)1.3. 前提条件 (5)1.4. 使用对象 (5)1.5. 软件结构 (6)1.6. 系统模块 (7)2. 后台业务WE孫统 (9)2.1. 01000系统登陆模块 (9)2.1.1.01001 系统登录 (9)2.2. 02000产品管理 (11)2.2.1.02001 产品分类定义 (11)2.2.2. 02002 产品定义 (14)2.3. 03000系统配置 (22)2.3.1.03001 保险公司配置 (22)2.3.2. 03002 基础数据配置 (25)2.4. 04000 BtoC 管理 (27)2.4.1.04001 产品分配 (27)2.4.2. 04002 用户管理 (29)2.4.3. 04003 保单管理 (32)2.4.4. 04004 订单管理 (35)2.4.5. 04005 积分商城 (37)2.4.6. 04006 理赔记录 (40)2.4.7. 04007 二维码管理 (42)2.4.8. 04008 网站模版管理 (44)2.4.9. 04009 评论管理 (45)2.4.10. 04010...................................................................................................................................................................................................................... 广告管理472.4.11. 04011...................................................................................................................................................................................................................... 内容发布492.4.12. 04012...................................................................................................................................................................................................................... 统计分析512.5. 05000 BtoB 管理 (53)2.5.1.05001 商家管理 (53)2.5.2. 05002 结算对账管理 (55)2.5.3. 05003 保单管理 (57)2.6. 06000 OtoO 管理 (59)2.6.1.06001 业务开通 (59)2.6.2. 06002 结算统计 (61)2.6.3. 06003 保单统计 (63)2.7. 07000系统管理 (65)2.7.1.07001 权限管理 (65)2.7.2. 07002 积分定义 (68)2.7.3. 07003 日志管理 (70)1. 需求概况1.1. 总体概述保险公司租用智云保险电子商务云服务平台,晶中会提供WE出单系统、智能接口系统、数据接口系统以及BtoC网站,这些网站需要管理和维护,保险公司与第三方机构合作需要给第三方机构提供系统、权限等,还需要对第三方机构进行产品分配和统计结算等操作,而这些操作都是保险公司内部进行的,因此需要给保险公司内部使用提供一套系统,而这套系统的主要功能有定义和配置产品信息、对前台系统的管理和维护、开通和管理第三方机构、统计公司的业务信息。
qpm 量-回复QPM(质量效能管理)量,是指在质量效能管理中对于质量相关数据的度量和评估。
通过对产品或服务的关键性能指标进行量化,可以帮助管理者了解和控制质量的状况,从而为决策提供依据,持续改进质量。
本文将探讨QPM量的重要性、QPM量的方法和应用,以及量化数据在质量管理中的作用。
一、QPM量的重要性1. 了解质量现状:通过量化数据,管理者可以清晰地了解产品或服务的质量现状,包括缺陷率、故障率等关键指标。
这样有助于管理者识别质量瓶颈和问题所在,及时进行调整和改进。
2. 支持决策:量化数据可以为管理者提供决策的依据。
通过对关键性能指标的量化,可以帮助管理者辨别出业务的薄弱点,并采取相应措施进行改进,提高产品或服务的质量。
3. 推动持续改进:QPM量为组织提供了一种持续改进的手段。
通过定期收集和分析量化数据,管理者可以发现潜在问题,并及时采取纠正措施,以不断提高产品或服务的质量水平。
二、QPM量的方法和应用1. 定义关键性能指标(KPIs):首先,需要确定哪些指标对于产品或服务的质量是关键的。
这些指标应该是能够量化的,例如缺陷率、故障率、客户投诉率等。
2. 数据收集和整理:根据确定的关键性能指标,需要收集相应的数据。
数据可以来自于产品测试、客诉记录、生产过程监控等不同的来源。
收集到的数据需要进行整理和分类,确保统一和准确。
3. 数据分析和评估:对收集到的数据进行分析和评估,以了解质量状况和问题所在。
比如,可以通过计算缺陷率或故障率来评估产品的质量水平。
同时,还可以通过比较不同时间段或不同产品之间的数据,找出潜在的质量改进机会。
4. 衡量绩效和制定改进计划:根据数据分析的结果,可以衡量绩效,并制定相应的改进计划。
管理者可以基于量化数据对产品或服务进行评估,并制定目标和行动计划,以推动质量的持续改进。
三、量化数据在质量管理中的作用1. 监控质量:量化数据提供了监控质量的手段。
通过定期收集和分析数据,可以发现质量问题的变化和趋势,从而及时采取纠正措施,保证产品或服务的质量稳定性。
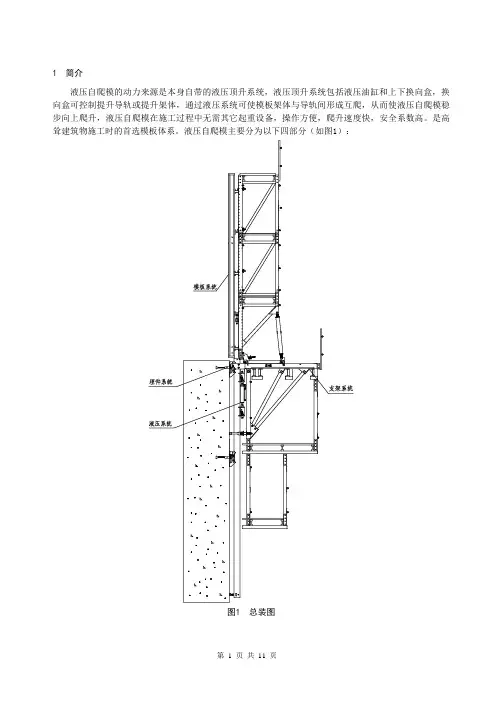
1 简介
液压自爬模的动力来源是本身自带的液压顶升系统,液压顶升系统包括液压油缸和上下换向盒,换向盒可控制提升导轨或提升架体,通过液压系统可使模板架体与导轨间形成互爬,从而使液压自爬模稳步向上爬升,液压自爬模在施工过程中无需其它起重设备,操作方便,爬升速度快,安全系数高。
是高耸建筑物施工时的首选模板体系。
液压自爬模主要分为以下四部分(如图1):
图1 总装图
1.1 模板系统:
1.2 埋件部分:
1.3 支架系统:
主要由承重三角架、后移装置、中平台、吊平台、导轨、附墙装置、桁架支撑系统组成。
1.3.1 后移装置:
1.3.2 承重三角架总成
1.3.3 中平台:
1.4 液压系统:
主要有液压泵站控制台、液压油缸、同步阀、胶管、液压阀和配电装置。
2 液压自爬模的安装过程
2.1 准备两片木板300mmx2440mm左右,按照爬锥中到中间距摆放在水平地面上。
保证两条轴线绝对平行,轴线与木板连线夹角90°,两对角线误差不超过2mm。
将三角架扣放在木板轴线上,保证三角架中到中间距等于爬第一次浇筑爬锥中到中间距。
两三角架对角线误差不超过2mm,安装平台立杆,用钢管扣件连接。
两三脚架间同样用钢管扣件连接。
注意加斜拉钢管(如图2)。
图2 拼三角架
2.2 安装平台板,平台要求平整牢固,在与部件冲突位置开孔,以保证架体使用,并再次校正两三角架中道中间距是否为第一次浇筑爬锥中到中间位置(如图3)。
图3 安装平台
2.3 将拼好的架体整体吊起,平稳挂于第一次浇筑时埋好的受力螺栓(挂座体)上,插入安全插销(如图4)。
图4 吊装三角架
2.4 拼装桁架、安装所有操作平台。
先在模板下垫四根木梁,然后在模板上安装主背楞、斜撑、挑架,注意背楞调节器与模板背楞的支撑情况,安装背楞扣件,用钢管扣件将挑架连接牢固,注意加斜拉钢管。
斜撑用铁丝和模板背楞绑在一起,防止在吊起过程中晃动。
平台要求平整牢固,在与部件冲突位置开孔,以保证架体使用(如图5)。
图5 拼装桁架、安装操作平台
2.5 将拼装好的模板和架体整体吊起,平稳挂于第一次浇筑时埋好的受力螺栓(挂座体)上,插入安全插销。
利用斜撑调节角度,校正模板。
完成吊装过程(如图6)。
图6 吊装桁架和模板
3 爬升流程
混凝土浇筑完后→拆模后移→安装附装置→提升导轨→爬升架体→绑扎钢筋→模板清理刷脱模剂→埋件固定模板上→合模→浇筑混凝土
3.1 预埋件安装,将爬锥用受力螺栓固定在模板上,爬锥孔内抹黄油后拧紧高强螺杆,保证混凝土不能流进爬锥螺纹内。
埋件板拧在高强螺杆的另一端。
锥面向模板,和爬锥成反方向。
3.2 埋件如和钢筋有冲突时,将钢筋适当移位处理后进行合模。
3.3 提升导轨,请将上下换向盒内的换向装置调整为同时向上。
换向装置上端顶住导轨。
3.4 爬升架体时上下换向盒同时调整为向下,下端顶住导轨。
(爬升或提导轨液压控制台有专人操作,每榀架子设专人看管是否同步,发现不同步,可调液压阀门控制)
3.5 导轨提升就位后拆除下层的附墙装置及爬锥,周转使用。
注:附墙装置及爬锥共3套,2套压在导轨下,1套周转。
第一步第二步第三步
⑴安装模板完毕⑴拆模、后移模板⑴爬升到位
⑵浇筑混凝土⑵插导轨⑵安装吊平台
⑶施工人员在平台绑扎钢筋⑶爬升
第四步第五步第六步
⑴合模完毕⑴浇筑完毕⑴进入标准爬升阶段
⑵浇筑混凝土⑵拆模⑵又一次浇筑混凝土
⑶提升导轨、爬升架体
4 安全操作管理
4.1 爬模安装埋件、挂座时必须系好安全带和佩戴必要防护用品。
高强螺杆和爬锥连接必须要拧紧,爬锥面顶到模板面板且不能转动即可。
爬锥上均匀涂脱模剂,防止爬锥拆卸困难。
4.2 混凝土强度必须到达10MPa以上,方可爬升。
4.3 严禁夜间光线不足时进行爬升作业。
4.4 在雷雨、大风(8级以上)、大雾、大雪等恶劣天气情况下,爬模不得进行操作。
4.5 液压泵站应设专人操作,非操作人员不得动用液压泵,液压泵使用时压力不得高于16MPa。
4.6 爬模爬升时除爬模操作人员外,其他人员一律离开爬模架,爬升到位后其他作业方可进行。
4.7 爬模时下端四周3米用警戒线维护,所有人员不得进入警戒区,以防高空有物体坠落。
4.8 爬升架体或提导轨前,操作人员检查机械是否运转正常,正常方可爬升,架上不许放太多物料,准备好一切爬升工具,方可进行爬模。
4.9 爬模操作人员须经过严格培训后,经项目部安检部门认可后方能独立操作。
4.10 爬模爬升时,爬升架上不得堆放重物。
5 合模
5.1 合模前将模板清理干净,刷好脱模剂,装好埋件系统。
5.2 测量模板拉杆孔的位置,是否与钢筋冲突。
5.3 将模板移位,贴近混凝土的表面。
5.4 用线坠或仪器校正调整模板垂直度。
5.5 插好后齿轮销。
5.6 穿好套管、拉杆,拧紧每根对拉螺杆。
5.7 复查模板垂直,紧固每根斜支撑。
5.8 浇筑混凝土。
6 拆模
6.1 混凝土达到强度后拆模。
6.2 卸出所有穿墙螺栓、阳角斜杆,并抽出拉杆(包括斜角拉杆等)。
6.3 拔出后齿轮销。
6.4 将模板后移到位(模板可移600mm-700mm),再插上后移插销。
7 拆除液压爬架
7.1 用塔吊先将模板拆除并吊下。
7.2 拆除主平台以上的模板桁架系统,用塔吊吊下。
7.3 用塔吊抽出导轨。
7.4 拆除液压装置及配电装置。
7.5 将液压控制台的主平台跳板拆除,吊出液压控制泵站和一些液压装置。
7.6 操作人员位于吊平台上将下层附墙装置及爬锥拆除并吊下。
7.7 用塔吊吊起主梁三脚架和吊平台,起至适当高度,卸下最高一层附墙装置及爬锥,并修补好爬锥洞。
7.8 最后拆除与爬梯或电梯相连的架体,操作人员卸好吊钩、拆除附墙装置及爬锥,操作人员从电梯或爬梯下来后,再吊下最后一榀架子。
第9 页共11 页。