面向对象影像分析简要介绍--以eCognition为例
- 格式:doc
- 大小:2.64 MB
- 文档页数:20
版权归Father Jacob所有,转载请注明。
摘要:Trimble最近发布了eCognition Suite9.1版本以及eCognition Essentials 1.1版本的更新。
本文重点介绍eCognition Essentials 1.1的基本功能以及相关更新情况。
公司介绍:eCognition是一家初创于2000年5月的德国软件公司,专注于使用计算机手段从遥感影像中提取信息。
相较于传统的基于像素的进行分析的图像处理手段,eCognition以图像中的对象(相关的一组像素)为基本单位,对遥感影像进行多尺度分析。
这也是eCognition系列软件的特点。
2010年6月,为了扩展其空间信息业务,美国著名的测量仪器生产销售以及测绘解决方案提供公司Trimble Navigation收购了eCognition。
eCognition软件产品线介绍:具体来说,eCognition软件是一种可以自动从影像数据和遥感数据中提取可供GIS以及相关用户使用特定信息(往往包括统计数据、矢量图层、分类点云等)的一个软件工具。
eCognition软件产品线主要包括eCognitonSuite以及eCognition Essentials。
前者又具体包括eCognition Developer(开发与分析环境)、eCognition Server(定制划应用), 以及eCognition Architect(处理环境)三个组件。
这些相关的开发、分析、定制以及应用的软件组件可以根据客户需求,在相关的专业人士手中发挥强大的影响处理功能,并囊括从数据生产,影像处理到数据转换和数据发布的所有流程(以后有机会具体阐述)。
而eCognition Essentials则是基于eCognition Suite开发出的即用型地标分类覆盖分类软件。
任何水平的用户经过简单的熟悉,就可高效,更智能地得到高质量的可直接用于GIS以及相关用户所需要的数据成果。

eCognition的概论eCognition是北京天目创新科技有限公司代理的德国DefiniensImaging公司的遥感影像分析软件,它是人类大脑认知原理与计算机超级处理能力有机结合的产物,即计算机自动分类的速度+人工判读解译的精度,更智能,更精确,更高效地将对地观测遥感影像数据转化为空间地理信息。
eCognition突破了传统影像分类方法的局限性,提出了革命性的分类技术-面向对象分类。
eCognition分类针对的是对象而不是传统意义上的像素,充分利用了对象信息(色调,形状,纹理,层次),类间信息(与邻近对象,子对象,父对象的相关特征)。
eCognition基于Windows操作系统,界面友好简单。
与其他遥感,地理信息软件互操作性强,广泛应用于:自然资源和环境调查,农业,林业,土地利用,国防,管线管理,电信城市规划,制图,自然灾害监测,海岸带和海洋制图,地矿等方面。
面向影像对象:*面向像素的解算模式将像元孤立化分析,解译精度较低且斑点噪声难以消除;*利用影像分割技术把影像分解成具有一定相似特征的像元的集合—影像对象;*影像对象和像元相比,具有多元特征:颜色、大小、形状、匀质性等;基于对象属性特点:- 颜色信息丰富- 形状接近真实地物- 大小区分明显- 纹理信息突出- 上下文关系明确基于像素属性特点:- 基本上只以颜色信息来区分主要分类过程介绍:采用eCognition软件对影像进行分类操作非常简单,可以主要以三个步骤来形容如下:1.分割分割是面向对象分类的前提,多尺度分割是影像对象提取的专利技术,可以根据目标任务和所用影像数据的不同以任意选定的尺度分割出有意义的影像对象原型。
2.分类多尺度分割的结果是影像对象层次网络,每一层是一次分割的结果,影像对象层次网络在不同的尺度同时表征影像信息。
3.导出导出分类结果。
eCognition提供的专业分类工具包括* 多源数据融合* 多尺度分割* 基于样本的监督分类* 基于知识的模糊分类* 人工分类* 自动分类多源数据融合工具:可用来融合不同分辨率的对地观测影像数据和GIS数据,如Landsat,Spot,IRS,IKONOS, QuickBird,SAR,航空影像,LIDAR等,不同类型的影像数据和矢量数据同时参与分类。
面向对象影像分析简要介绍——以eCognition软件为例前言遥感影像的光谱,空间,时间分辨率不断提高,为开展各类遥感应用提供各种数据。
但在遥感数据获取能力增强的同时,也使得丰富的影像数据得不到充分利用和挖掘,从而出现“数据丰富,信息贫乏”的困境。
如何快速自动准确地从遥感影像中提取出能满足某种应用的专题信息,是我们亟待要解决的问题。
随着面向对象思想的风行以及面向对象影像分析技术的不断成熟,使得我们从高分影像中提取专题信息变得更加便捷。
尤其是一些商业的面向对象影像分析软件的出现,如eCognition,Feature Analysis。
eCognition软件的口号就是“Exploring the soul of imagery(发掘影像最大潜能)”。
本论文旨在从eCognition软件了解面向对象影像分析的相关思想和技术。
希望通过探究eCognition软件背后的思想以及技术原理,如面向对象,多尺度分割,模糊分类等,为高分辨率遥感影像的特征描述以及建模带来一些启发。
1.面向对象面向对象的思想是针对具体应用,将问题处理对象(逻辑概念上或物理概念上)划分为合适粒度(即对象)来进行处理,并封装其相应的属性以及行为,同时为了更好的复用以及扩展,维护更新,使其具有继承,多态,聚合等特性。
1.1对象对象是指状态和行为的集合体,在物理实现上表现为数据和操作的集合,逻辑上表现为有职能的实体。
它是用来描述现实世界中的物理概念或逻辑概念上的物体。
比如人就是一个对象,它有性别,年龄,姓名等属性,人有吃饭睡觉等行为。
武汉大学也是一个对象,它有名称,学院机构,学校历史等属性,也有教学科研等行为。
不同的是人是物理概念上的对象,武汉大学是逻辑概念上的对象。
1.2抽象性,封装性,继承性抽象是抽取出我们所感兴趣的部分,用这些少量特征来描述一个事物。
封装性是对事物的数据和操作进行封装,即对其状态和行为进行封装。
继承特性是对事物属性和行为的继承。
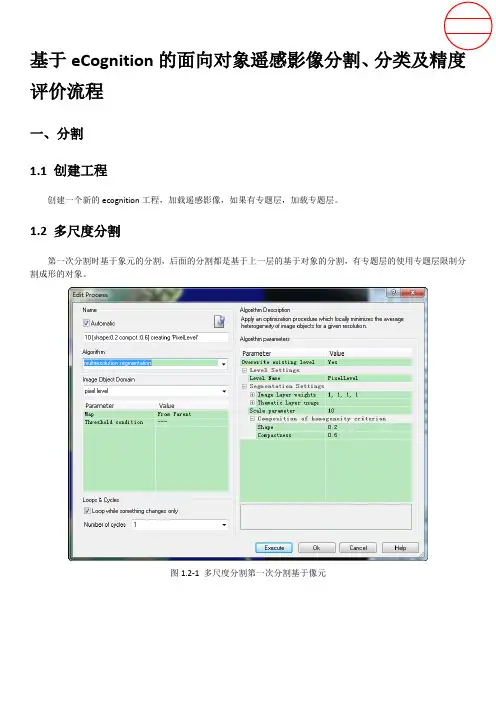
基于eCognition 的面向对象遥感影像分割、分类及精度评价流程一、分割 1.1 创建工程创建一个新的ecognition 工程,加载遥感影像,如果有专题层,加载专题层。
1.2 多尺度分割第一次分割时基于象元的分割,后面的分割都是基于上一层的基于对象的分割,有专题层的使用专题层限制分割成形的对象。
图1.2-1 多尺度分割第一次分割基于像元T an g Sh i mi ng2012.11.20资源与环境工程学院汤世明mihSgnaT图1.2-2 之后的分割都是基于上一层影像对象层多次分割之后可以得到一个尺度列表:图1.2-3 多尺度分割图层列表二、分类2.1 创建分类体系创建需要从影像中提取的各个类别。
mihSgnaT图2.1-1 创建类别类描述可以先空着,由后面优化算法自动计算。
2.2 选择分类尺度图层选择适合某一地类的分割尺度图层。
比如本例中在400尺度下分水体、非水体。
mihSgnaT图2.2-1 选择适宜尺度图层2.3 选择样本按一定要求选择样本。
利用工具Sample Editor和Select Samples。
mihSgnaT图2.3-1 选择样本工具2.4 优化特征属性集选择要参与分类的属性,并通过属性优化器进行筛选,得出最佳的属性组合,将其应用于各个类。
图2.4-1 选择特征属性优化并将优化结果应用于最邻近分类和类描述。
2.5 分类执行分类算法。
图2.5-1 分类算法参数设置2.6 优化分类反复选样本、优化特征属性、修改参数、利用空间关系等优化分类。
三、精度评价 3.1 精度评价重新随机选择一部分样本,计算混淆矩阵。
T an g Sh i mi ng图3.1-1 eCognition 中的精度评价T an g Sh i mi ng。
基于 E-cognition 的面向对象的高分辨率遥感图像分类研究黄瑾【摘要】High resolution remote sensing images have abundant information about spatial and texture ,while the spectral information is less relatively .The traditional classification methods based on pixels’ spectrum features contain limited information when dealing withimages ,which is low in precision .In order to improve the precision of images classification ,the paper elaborates the object‐oriented classification method by using E‐cognition software:first ,using multi‐scale segmentation algorithm to generate objects ,then classifying them with proper features ,finally the precision of classification being analyzed objectively with overall accuracy and Kappa coefficient . According to the experiment ,the object‐ori ented classification method has high precision .%高分辨率遥感影像具有丰富的空间以及纹理信息,而光谱信息较弱,若采用传统的基于像元的分类方法,仅从光谱特征出发,在进行图像处理时能够获取的信息有限,导致分类精度较低。
《遥感图像解译eCognition软件》实习报告2021年11 月eCognition软件数据处理报告目录目录 (1)1实习原理 (2)2实习目的 (2)3实习步骤 (2)3.1导入数据,进行预处理 (3)3.2影像分割 (5)3.2.1棋盘分割 (5)3.2.2四叉树分割 (6)3.2.3多尺度分割 (7)3.2.4波谱差异分割 (9)3.3建立分类体系 (10)3.4样区选择与特征空间的构建 (11)3.4.1样区选择 (11)3.4.2特征空间构建 (12)3.5执行分类 (15)3.3结果输出 (16)4实习心得 (17)正文一.实习原理随着遥感技术的不断发展,遥感信息的现势性、宏观性、成图周期短、多时性和立体覆盖能力的优势,让其在土地利用信息获取方面发挥着越来越重要的作用。
利用遥感影像对地物进行分类,并根据分类结果影像编制专题地图,也已经成为了土地利用,监测方面不可缺少手段。
而遥感影像分类的精度,直接影响着遥感数据可利用性和专题地图的精度。
因此利用相关软件或者算法提高遥感影像分类的精度,成为了提升遥感数据使用价值中刻不容缓的任务。
eCognition系列软件作为面向对象影像分析技术的专业软件,与传统的ERDAS/ENVI/PCI等有明显的不同,虽然ERDAS和ENVI里也有相应的面向对象分类模块,但其对高分辨率影像的信息提取效果,及高分辨率影像涉及的各个行业的应用范围无法与eCognition软件相比。
eCognition软件最大的特色采用面向对象的遥感影像分析。
首先将影像按照一定尺度分割成一个个对象,然后对每一个对象封装其光谱、形状、纹理等特性并且建立该对象与其相邻对象、父对象、子对象之间的关系。
其中主要包括分割与分类两个步骤。
分割——是指依据某种同质性或者异质性标准,将影像划分成很多小块对象的过程;是分类的前提。
分类——是指依据小块对象的形状、颜色、纹理、空间关系、隶属关系等属性来识别所属类别的过程。
面向对象的遥感影像信息提取摘要:随着遥感技术的不断发展,遥感影像的分辨率不断的提高,如何对遥感影像中的地物信息进行高效、快速的提取,是当前研究的热点问题。
面向对象的方法先对影像进行多尺度分割得到同质区域对象,充分利用遥感影像中丰富的光谱、形状、纹理等特征对分割后的对象进行分类。
面向对象的遥感信息提取的方法克服了传统的基于像元的分类方法只依靠光谱信息的缺点,更高效的获取地物信息,得到更高精度的分类结果。
关键词:多尺度分割、分类、遥感影像、面向对象Abstract:With the continuous development of remote sensing technology, the resolution of remote sensing image is constantly improving. How to efficiently and quickly extract the ground object information in remote sensing image is a hot issue in current research. The object oriented method firstly segmented the image to obtain the homogeneous region object, and made full use of the rich spectral, shape, texture and other features of remote sensing image to classify the segmented object. The object-oriented remote sensing information extraction method overcomes the shortcoming of the traditional classification method based on pixel which only relies on spectral information, and obtains the ground object information moreefficiently and gets the classification result with higher precision.Key word:Multi-scale segmentation、classification、remote sensing image、object oriented.1引言利用面向对象的信息提取技术,可以更好掌握实际生产生活中地物变化情况,以及土地利用等情况,能够为国土空间规划、土地利用调查、资源普查、交通规划、生态旅游发展等工作提供有力的数据支撑。

测绘技术中的图像处理与分析软件介绍测绘技术是现代科学和技术的重要组成部分,它为我们提供了获取、分析和展示地理信息的能力。
在测绘技术的发展过程中,图像处理与分析软件在地理信息系统(GIS)的应用中起着关键作用。
本文将介绍一些常用的图像处理与分析软件及其功能。
一、ENVIENVI(Environment for Visualizing Images)是一款专业的遥感图像处理和分析软件。
它提供了灵活的工具和算法,用于获取和解释遥感图像。
ENVI具有强大的图像分类和变换功能,可以处理多种类型的遥感数据,如光学图像、雷达图像和卫星图像等。
通过ENVI,用户可以进行图像处理、光谱分析、地物分类、三维可视化等操作,帮助研究人员和决策者更好地理解和利用遥感图像数据。
二、ArcGISArcGIS是Esri公司开发的一套集成地理信息系统软件。
它具有强大的数据管理和地理分析功能,可以处理各种地理数据,包括地形、地物、气象和人口数据等。
ArcGIS中的图像处理和分析功能主要通过其图像分析扩展模块提供。
该模块包含了一系列工具和算法,用于遥感数据的处理、分析和可视化。
用户可以使用ArcGIS进行图像配准、遥感数据拼接、面向对象地物分类等操作,从而获得高质量的地理信息。
三、ERDAS IMAGINEERDAS IMAGINE是Hexagon Geospatial公司推出的一款专业遥感图像处理软件。
它具有强大的图像处理和分析功能,可以处理各种类型的遥感数据。
ERDAS IMAGINE提供了一系列高级工具和算法,用于图像增强、特征提取、变换分析和图像分类等方面。
该软件还具有友好的用户界面和直观的操作流程,使用户可以轻松完成复杂的遥感图像处理任务。
四、eCognitioneCognition是Trimble公司开发的一款面向对象的遥感图像分析软件。
它通过分析图像中的对象,提取并识别地物特征。
eCognition具有快速和准确的图像分析性能,可以利用图像的空间、光谱和纹理信息进行地物分类和变化检测。
ecognition中的影像分类方法ecognition是一种基于图像分类的方法,它广泛应用于遥感图像分析、地理信息系统和计算机视觉等领域。
本文将重点介绍ecognition中的影像分类方法。
影像分类是将遥感图像中的像素点划分为不同的类别,以便对地物进行识别和分析。
ecognition采用了一种基于对象的方法,将像素点组织成不同的对象,并根据对象的特征进行分类。
下面将介绍ecognition中常用的几种影像分类方法。
1. 基于像素的分类方法基于像素的分类方法是将遥感图像中的每个像素点单独进行分类。
ecognition可以利用像素的光谱信息、纹理特征、形状特征等进行分类。
通过像素级别的分类,可以得到每个像素点所属的类别,但无法获取地物的空间信息。
2. 基于对象的分类方法基于对象的分类方法是将遥感图像中的像素点组织成不同的对象,并对对象进行分类。
ecognition可以根据对象的大小、形状、纹理等特征进行分类。
相比于基于像素的分类方法,基于对象的分类方法能够获取地物的空间信息,可以更准确地识别和分析地物。
3. 基于特征的分类方法基于特征的分类方法是根据遥感图像中地物的特征进行分类。
ecognition可以提取地物的光谱特征、纹理特征、形状特征、空间关系等特征,并利用这些特征进行分类。
通过提取多种特征,可以提高分类的准确性和鲁棒性。
4. 基于机器学习的分类方法基于机器学习的分类方法是利用已有的样本数据进行训练,然后将训练好的模型应用于新的遥感图像。
ecognition可以使用支持向量机、随机森林、深度学习等机器学习算法进行分类。
通过机器学习的方法,可以自动学习地物的特征,并进行准确的分类。
5. 基于空间信息的分类方法基于空间信息的分类方法是利用遥感图像中地物的空间关系进行分类。
ecognition可以利用对象的空间位置、空间邻近关系等信息进行分类。
通过考虑地物的空间分布特征,可以提高分类的准确性和鲁棒性。
ecognition 多尺度分割原理摘要:1.多尺度分割的概述2.多尺度分割的方法3.多尺度分割的应用实例4.多尺度分割的未来发展趋势正文:一、多尺度分割的概述多尺度分割是一种图像处理技术,它的主要目的是将图像分解为不同的层次结构,以便更好地理解和分析图像中的复杂特征。
多尺度分割可以帮助我们在不同的尺度上观察和处理图像,从而更加全面和准确地理解图像所包含的信息。
二、多尺度分割的方法多尺度分割的方法主要包括以下几种:1.基于像素的分割方法:这种方法直接对图像中的每个像素进行分割,常见的算法有阈值分割、区域生长等。
2.基于区域的分割方法:这种方法先将图像划分为不同的区域,然后再对每个区域进行分割。
常见的算法有区域生长、区域合并等。
3.基于边缘的分割方法:这种方法主要通过检测图像中的边缘来进行分割,常见的算法有Canny 边缘检测、Sobel 边缘检测等。
三、多尺度分割的应用实例多尺度分割在许多领域都有广泛的应用,例如:1.在医学影像分析中,多尺度分割可以帮助医生更准确地识别和分析病变部位,从而提高诊断的准确性。
2.在遥感影像处理中,多尺度分割可以帮助我们更好地识别地表特征,从而提高遥感数据的利用率。
3.在目标检测和跟踪中,多尺度分割可以帮助我们更好地识别和跟踪目标,从而提高系统的性能。
四、多尺度分割的未来发展趋势随着人工智能和计算机视觉技术的发展,多尺度分割的未来发展趋势主要表现在以下几个方面:1.算法的自动化:随着深度学习等技术的发展,未来多尺度分割的算法将更加自动化,不再需要人工设定参数。
2.算法的智能化:未来的多尺度分割算法将更加智能化,能够根据图像的特征自动选择最佳的分割方法。
遥感影像分析之eCognitionDeveloper使⽤说明eCognition DevelopereCognition的基础eCognition Developer是⼀个强⼤的⾯向对象的影像分析开发环境。
它⽤来在地球科学领域开发规则集(或为eCognition Architect开发应⽤程序)以做到遥感数据的⾃动分析。
特点与优点1.优良的⾯向对象的影像分析⼯具和算法的集合2.分析栅格、⽮量和点云数据3.两种启动模式——快速使⽤的QuickMap模式与传统的Developer模式4.直观的开发环境5.从单⼀的桌⾯版扩展到企业产品⼯作流程6.软件开发⼯具包(SDK)7.在线访问规则集资源产品亮点优良的⾯向对象的影像分析⼯具和算法针对图像分析的不同⽅⾯,Definiens Developer提供了⼀个全⾯的算法集合。
⽤户能从各种分割算法中进⾏选择,如多分辨率分割、四义树分割或棋盘分割。
分类算法的范围包括基于采样的最邻近法、模糊逻辑⾪属函数或专门上下⽂驱动分析。
层操作算法允许应⽤⾯对象元的过滤器,如坡度、坡向、边缘提取或⽤户⾃定义的层计数。
直观的开发环境图形⽤户界⾯灵活地显⽰了任何影像数据源。
简单的拖放功能,能够让那些没有任何编程技能的⽤户为标准化分析进⾏快速开发规则集和应⽤软件。
即使是最⾼级的任务,⾼级⽤户也能利⽤强⼤的⼯具来解决。
⾃动化和⽣产在eCognition Architect中建⽴⼀个应⽤程序后,它可以被存储,并能扩展eCognition Server功能,并适⽤于⼤量的图像。
通过⾯向服务架构提供⼴泛的可扩展性时,这能够使图像分析过程完全⾃动化。
软件开发⼯具包(SDK)内置的SDK允许通过添加算法、对象特征以及数据驱动程序等扩展Definiens Developer的核⼼能⼒。
因此,⾃定义分割、分类、层操作或对象特征就可以添加到软件当中。
eCognition Developer是如何⼯作的?在数据加载步骤中,数据能以任意组合的⽅式导⼊。
面向对象影像分析简要介绍——以eCognition软件为例前言遥感影像的光谱,空间,时间分辨率不断提高,为开展各类遥感应用提供各种数据。
但在遥感数据获取能力增强的同时,也使得丰富的影像数据得不到充分利用和挖掘,从而出现“数据丰富,信息贫乏”的困境。
如何快速自动准确地从遥感影像中提取出能满足某种应用的专题信息,是我们亟待要解决的问题。
随着面向对象思想的风行以及面向对象影像分析技术的不断成熟,使得我们从高分影像中提取专题信息变得更加便捷。
尤其是一些商业的面向对象影像分析软件的出现,如eCognition,Feature Analysis。
eCognition软件的口号就是“Exploring the soul of imagery(发掘影像最大潜能)”。
本论文旨在从eCognition软件了解面向对象影像分析的相关思想和技术。
希望通过探究eCognition软件背后的思想以及技术原理,如面向对象,多尺度分割,模糊分类等,为高分辨率遥感影像的特征描述以及建模带来一些启发。
1.面向对象面向对象的思想是针对具体应用,将问题处理对象(逻辑概念上或物理概念上)划分为合适粒度(即对象)来进行处理,并封装其相应的属性以及行为,同时为了更好的复用以及扩展,维护更新,使其具有继承,多态,聚合等特性。
1.1对象对象是指状态和行为的集合体,在物理实现上表现为数据和操作的集合,逻辑上表现为有职能的实体。
它是用来描述现实世界中的物理概念或逻辑概念上的物体。
比如人就是一个对象,它有性别,年龄,姓名等属性,人有吃饭睡觉等行为。
武汉大学也是一个对象,它有名称,学院机构,学校历史等属性,也有教学科研等行为。
不同的是人是物理概念上的对象,武汉大学是逻辑概念上的对象。
1.2抽象性,封装性,继承性抽象是抽取出我们所感兴趣的部分,用这些少量特征来描述一个事物。
封装性是对事物的数据和操作进行封装,即对其状态和行为进行封装。
继承特性是对事物属性和行为的继承。
在面向对象影像分析中,抽象表现为提取出遥感专题信息。
封装性表现为将影像对象的光谱,形状,纹理等特性进行封装。
而继承特性在体现在多尺度分割中,通过将影像基于对象或是基于像素按照一定尺度自底向上合并成不同的对象,从而建立起与父对象,子对象,相邻对象的关系。
如图1.1所示:图1.1 多尺度网络[1]从图1.1可以看出,最下面为像素层,最上面为影像整幅场景。
由像素层按照一定允许的异质性(即尺度)合并像素生成Level1,然后基于Level1合并生成Level2。
如果从Level3生成Level2(注:Level3的尺度大于Level2),则基于Level3分裂生成Level2。
从图上层次网络可以看出,Level2是Level1的父层,是Level3的子层。
子层继承父层的属性。
我们可以从某层的父层找到该层对象的父对象,从某层的子层找到该层的子对象。
我们也可以从图1.2中更好的理解父对象和子对象。
图1.2. the hierarchy of image objects[2] (影像对象的层次) 从图1.2中可以看出,基于像素层,自底向上,抽象层次越来越高,分割尺度也越来越大。
Cell Level的Cell是Nucles Level的Cell body&Nucleus的父对象,Spot Level的Spots inNucleus是Nucles Level的Cell body&Nucleus的子对象。
对象之间的层次关系可以很好的反映目标与背景的关系以及目标的上下文信息,这样一定程度可以避免同物异谱,异物同谱的现象。
1.3面向对象影像分析面向对象的遥感影像分析的基本原理是根据像元的形状、颜色、纹理等特征,把具有相同特征的像素组成一个影像对象,然后根据每一个对象的特征对这些影像对象进行分类。
面向对象影像分析有两个独立的模块:对象生成与信息提取,即分割与分类。
影像分割是首先基于对整个影像进行尺度空间的构建,然后再根据分割参数提取出不同的对象多边形。
分类是根据分割得到的对象的属性(如光谱特征,形状特征,纹理特征等)赋予其语义信息,也就是赋予其属于哪一类地物。
在易康软件中将影像定义为:影像并非由单个像素来代表,而是由包含重要语义信息(如光谱特征,形状特征,纹理特征等)在内的影像对象以及他们之间的相互关系(父子对象之间的关系,相邻对象之间的关系)构成[2]。
易康软件最大的特色采用面向对象的遥感影像分析,首先将影像按照一定尺度分割成一个个对象,然后对每一个对象封装其光谱,形状,纹理等特性,并且建立该对象与其相邻对象,父对象,子对象之间的关系。
其主要体现如下:如图1.3所示:通过分类将一副影像抽象成几类地物的信息。
图1.3. 高分影像面向对象分类(抽象性)图1.4. 分类体系图1.5. 影像对象信息从图1.4 可以看出,首先将图像在level1上分割成分人工和人工类,然后在level2上让非人工1继承非人工,非人工1包括草地1和湖泊1。
同理在level3上人工1继承人工的属性,人工1包括道路1和房屋1,并且在属性设置道路继承道路1,房屋继承房屋1,湖泊继承湖泊1,草地继承草地1,这个图中,人工与人工1是is-of的继承关系,人工是人工1的父对象,草地1与非人工1是has-of的聚合关系。
从图1.5可以看出对象的各波段的光谱信息以及形状信息封装在对象信息中,我们可以根据具体应用选择不同的特征信息封装到影像对象中。
面向对象影像分析相对于基于像素的影像分析,具有以下优势[1]:(1)分类特征得到扩展对象不仅继承像元的光谱特性,还具有形状特性以及层次关系等分类特征,从而使得对象分类特征得到扩展,使得分类结果精度更高。
(2)运行效率得到提高由成千上万个像素到几千个对象,计算机处理的数目大大减小,从而使得运行效率得以提高。
(3)分类精度得到保障根据异质性最小原则分割出来的对象有自己的形状特征和边界轮廓,能够更加准确的反映地物的真实边界、轮廓信息,从而根本上减少错分、漏分的几率,同时能有效避免椒盐噪声,提高分类精度。
(4)分割尺度可控针对不同地物目标的形状特征以及提取需求,可以灵活设置各种尺度,进行多尺度分割。
2.多尺度分割对象提取是面向对象思想的重要前提。
故首先需要根据影像的光谱等特性将影像分割成互不重叠的区域作为影像分析处理的对象,即对影像进行图像分割。
易康软件主要提供了棋盘,四叉树以及多尺度分割算法。
由于棋盘算法和四叉树算法不常用,本论文对棋盘算法以及四叉树算法进行简要介绍,重点介绍易康面向对象的一大特色——多尺度分割。
2.1图像分割图像分割就是把图像空间划分成若干个具有某些一致性属性的不重叠区域并提取出感兴趣的目标的技术和过程,而对图像空间的划分则建立在区域的相似性和非连续性这两个概念上。
易康软件提供的是先将影像按一定算法切割成一个个同质区域作为影像对象,再基于影像对象进行处理。
易康提供的影像分割的算法有棋盘算法,四叉树算法,多尺度算法。
棋盘算法是基于像素级或是影像对象级将影像切割或合并成规则格网。
如下图2.1所示:图2.1. 尺度为20进行棋盘分割得到的结果[3]四叉树算法是基于像素级或是对象级将影像切割或合并成不同大小的同质方块区域。
分割效果如下图2.2所示:图2.2. 尺度为40进行四叉树分割得到的结果[3]多尺度分割基于异质性最小区域合并原则所生成的影像对象,对于Lena图像尽享多尺度分割结果如图2.3所示:图2.3. 多尺度分割图像得到的结果(尺度: 10,形状权重: 0.1,紧致度权重: 0.5)[3]2.2多尺度分割尺度,从宏观的角度看,其是指分析问题过程中,待处理对象粒度大小;从微观的角度看,如EC中的尺度是指区域合并的异质性阈值。
区域异质性是指区域内部各特征(如光谱特征,形状特征等)的差异性,与同质性相反。
在EC中是将影像看作一个个包含重要语义信息的对象和对象间的关系构成。
所以我们首先需要将影像分割成一块块区域作为对象。
分割的准则是基于对象内异质性最小,对象间异质性最大原则。
也就是基于区域异质性最小即尺度进行分割。
2.2.1基本原理高分辨率遥感影像中丰富的地物目标与空间语义信息必须在多尺度下才能充分表达和描述。
多尺度分割算法的目标是:在指定的与感兴趣的地物目标或空间结构特征相对应的尺度下,将影像分割成高同质的、互相连结的不同影像区域,与感兴趣的地物目标或空间结构特征相对应。
多尺度影像分割采用异质性最小的区域合并算法,其中像元的合并开始于影像中任意一个像元。
先将单个像元合并为较小的影像对象,再将较小的影像对象合并成较大的多边形对象。
2.2.2 异质性计算[4,5](1) 区域异质性对象内部的差异性主要考虑光谱特征和形状特征。
故区域异质性f 包括光谱异质性和形状异质性两方面,其计算公式为:(1)color color color shape f w h w h =+- (Ⅰ)(Ⅰ)式中,color w 为光谱权重,color h 表示对象S 光谱异质性,shape h 表示对象S 形状异质性。
1color w -表示形状权重。
(2) 光谱异质性光谱异质性是用来表示对象S 内部各像素之间的光谱差异性,它是通过对象S 各个波段光谱值标准差的加权和来表示。
1N color cc c h w σ==∑ (Ⅱ)(Ⅱ)式中,c w 表示第c 波段光谱的权重,c σ表示第c 波段光谱值的标准差。
(3) 形状异质性形状异质性是用来表示对象S 形状的差异性。
通过紧致度和光滑度加权和来描述对象S 的形状特征。
对象S 的紧致度是用来描述对象S 的饱满程度,即接近正方形和接近圆形的程度。
对象S 的破碎度是用来描述对象S 边界的破碎程度。
(1)shape compact compact compact smooth h w h w h =+- (Ⅲ)(Ⅲ)式中,compact w 表示紧致度的权重,compact h 表示紧致度,smooth h 表示光滑度。
以下是紧致度和光滑度的计算:/compact h l = (Ⅳ)/smooth h l b = (Ⅴ)(Ⅳ)式中,l 表示对象S 的边界所包含的像素个数,用来表示对象S 轮廓边界的长度;n 表示对象S 内部包含的像素个数,用来表示对象S 的面积。
用对象S 多边形的周长比上多边形的半径衡量对象S 区域的饱满程度,若对象S 是一个正方形,紧致度刚好为4。
该值越小,说明越饱满,越大,说明越狭长。
(Ⅴ)式中,l 表示对象S 的边界所包含的像素个数,用来表示对象S 轮廓边界的长度;b 表示对象S 最小外包矩形的边界长度。
用对象S 的边界周长比上对象S 近似边界的长度表示光滑度,衡量边界的破碎程度,若是该值越大,说明对象S 的边界越破碎。