无人机航拍技术-第1章
- 格式:pptx
- 大小:1.38 MB
- 文档页数:102
无人机应用技术专业课程标准一、招生对象与学制本专业招收初中毕业生或具有同等学历者,学制三年。
二、培养目标与业务范围(一)培养目标本专业培养掌握无人机应用的基本技能和基本维护技术,具有较扎实的的机械基础知识、电工和电子技术应用知识、无人机系统组成及构造基础知识、飞行原理与飞行性能基础知识和无人机飞行操控技能,掌握专业必备的核心技能,具有较高的计算机操作能力,能从事无人机的外业工作、一般故障检测与基本维修工作的高素质技能型人才。
(二)业务范围本专业毕业生主要从事面向无人机生产企业,从事无人机部件生产组装、总装调试、质量检验等工作;面向无人机营销企业,从事产品销售、售后服务等工作;面向无人机用户单位,从事飞行、生产作业、生产管理、维护维修等工作;面向婚庆公司、报社、电视台、广告、农业植保、公安、消防、边防巡逻等具体工作。
三、知识结构、能力结构及要求(一)知识结构及要求1、掌握机械基础基本知识和理论2、掌握简单的民航飞行员专业英语知识。
3、掌握工程力学、金属材料与热处理知识和理论。
4、掌握电工技术、模拟电路和数字电子技术等基本知识5、掌握微机控制技术、数码摄影技术。
6、掌握中国航空模型运动史知识、无人机驾驶员航空知识。
(二)能力结构及要求1、掌握无人机组装调试与维修技术的基本能力。
2、掌握无人机模拟仿真飞行操控的基本能力。
3、掌握飞行准备、操控能力,正常程序和应急程序检查与操作,飞行后检查与维护,任务载荷与作业评估能力。
4、掌握各行业无人机的操控能力,能够完成航拍、植保、巡检、测绘等工作。
四、课程设置及教学要求一、公共基础课(一)、德育课1.《道德法律与人生》(36学时)《道德法律与人生》旨在帮助学生了解文明礼仪的基本要求、职业道德的作用和基本规范,陶冶道德情操,增强职业道德意识,养成职业道德行为习惯。
2.《经济与政治常识》(18学时)本教材引导学生掌握马克思主义的相关基本观点和我国社会主义经济建设、文化建设、社会建设的有关知识;提高思想政治素质,坚定走中国社会主义道路的信念。
无人机航拍技术秘籍基础入门无人机航拍技术在近年来得到了广泛的应用,成为摄影爱好者和专业摄影师的新宠。
本文将为您介绍无人机航拍技术的基础知识,帮助您入门与掌握这一领域的技巧和技术。
一、无人机航拍技术概述无人机航拍技术是利用无人机设备进行航空摄影,通过搭载高清相机和定位系统,实现航空角度的拍摄与录像。
无人机航拍技术作为新兴的拍摄方式,其灵活、高效和多样化的特点得到了广泛的关注和喜爱。
二、无人机选购与机身特点1. 无人机选购在选择无人机时,您需要考虑所需要航拍的环境和要求,以及所拍摄的地域。
其中还需关注飞行平台的稳定性、电池续航能力和搭载相机的性能。
2. 无人机机身特点无人机航拍技术的机身特点主要包括飞行器的稳定性、飞行器尺寸与机动性、机身重量与飞行控制能力以及机身噪音等。
了解这些特点可以帮助您更好地选择合适的无人机设备。
三、相机选购与拍摄设置1. 相机选购选择合适的相机对于航拍来说是非常重要的一步。
您需要考虑相机的画质、分辨率、传感器尺寸、镜头类型等因素,以及相机对于航拍的适应性和稳定性。
2. 拍摄设置在进行航拍拍摄前,您需要了解相机的基本设置,并对其进行适当的调整。
例如,设置拍摄模式、曝光参数、白平衡、焦距等。
合理的设置有助于提高拍摄效果。
四、飞行技巧与安全意识1. 飞行技巧熟练掌握飞行技巧是进行无人机航拍的前提条件。
您需要了解无人机的起飞和降落技巧,掌握飞行姿态调整、悬停稳定、飞行路线规划等技术要点。
2. 安全意识无人机航拍涉及到公共安全和个人隐私等问题,因此在飞行过程中,您需要注重安全意识。
遵守当地航拍法规、选择合适的飞行地点、避免飞行时的风险与干扰等。
五、后期处理与分享1. 后期处理航拍之后的后期处理是提高影像质量的关键步骤。
您可以使用专业的后期处理软件,对航拍素材进行剪辑、调色、修复等处理,使影像效果更加出色。
2. 分享与展示将航拍作品进行分享与展示是锻炼自己和吸引他人的好方式。
您可以将作品上传至图片社交平台、参加摄影比赛或组织个人展览等方式来与他人分享和交流。

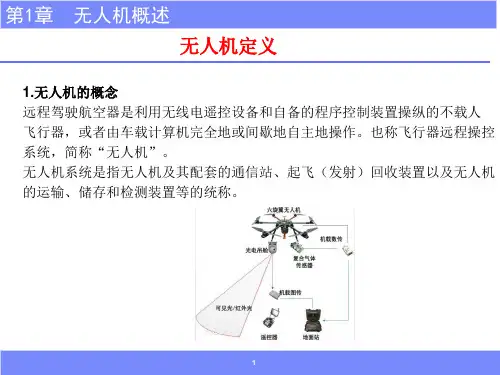
无人机操作技术手册第一章:无人机概述无人机,又称无人航空器,是一种不需要实际操控的飞行器。
它通过自动飞行程序和无线通信技术来执行各种任务,例如航拍、飞行检测、货物运输等。
本手册旨在向读者介绍无人机的操作技术和使用方法,帮助使用者熟练掌握无人机的基本操作,并安全高效地完成任务。
第二章:无人机基本知识1. 无人机构成部分无人机主要由机身、电池、无线通讯设备、控制器、摄像头等组成。
在操作无人机之前,使用者应熟悉各部分的功能和作用。
2. 无人机分类根据不同的用途和设计,无人机可分为多旋翼无人机和固定翼无人机。
前者结构简单,适用于低空飞行和垂直起降;后者具有长航时和高速飞行等优点,适用于长距离飞行任务。
3. 无人机飞行原理无人机飞行依靠空气动力学原理,通过调整电机转速、舵面和螺旋桨的姿态来控制无人机的飞行方向和高度。
使用者应了解无人机的飞行原理,熟悉相应的操控方法。
第三章:无人机操作流程1. 准备工作在飞行前,使用者应检查无人机和相关设备的工作状态,包括电池电量、遥控器信号、传感器校准等。
确保无人机处于良好的工作状态。
2. 起飞使用者应找到合适的起飞场地,并确保周围环境安全。
按照无人机说明书的指示,打开无人机和遥控器电源,并进行连接和校准操作。
确保无人机和遥控器之间的信号连接稳定后,可以进行起飞。
3. 悬停和导航一旦无人机起飞,使用者可以通过遥控器上的控制杆来操纵无人机实现悬停、前进、后退、转弯等动作。
操纵杆的控制方式根据不同的无人机型号而有所不同,使用者应按照说明书来进行操作。
4. 拍摄和录像若无人机配备有摄像头或录像设备,使用者可以通过遥控器上的按钮来拍摄照片或录制视频。
在拍摄或录制过程中,应注意无人机的飞行安全和周围环境的风险。
5. 降落和关机飞行任务完成后,使用者应寻找一个平稳的降落场地。
通过降落杆和操纵杆,将无人机缓慢降落到地面上。
降落后,关闭无人机和遥控器的电源,并进行后续的数据处理和设备保养。
无人机结构与系统-第一章无人机结构与飞行原理第一章无人机结构与飞行原理无人机是一种没有人员搭乘的飞行器,它由多个组件和系统构成。
本章将详细介绍无人机的结构和飞行原理。
1. 无人机结构无人机的结构可以分为以下几个主要部分:- 机身:无人机的机身是整个飞行器的主体部分,它承载其他组件和系统,并提供稳定性和结构强度。
机身通常由轻质材料如碳纤维复合材料构成,以减轻重量并提高飞行性能。
- 机翼:无人机的机翼负责提供升力,使飞行器能够在空中飞行。
机翼的形状和设计会影响无人机的飞行性能和稳定性。
- 尾翼:尾翼包括水平尾翼和垂直尾翼,用于控制无人机的姿态和方向。
水平尾翼控制俯仰运动,垂直尾翼控制偏航运动。
- 起落架:起落架用于无人机的起降过程,提供地面支撑和保护其他部件。
起落架通常由轮子和避震系统组成。
- 传感器和负载:无人机通常配备各种传感器和负载,如相机、雷达、红外线传感器等。
这些传感器和负载用于收集数据和执行特定任务,如航拍、监测和侦察。
2. 无人机飞行原理无人机的飞行原理与有人飞机类似,都是基于气动力学原理。
无人机的飞行主要依靠以下几个力:- 升力:升力是垂直向上的力,由机翼产生。
当无人机在空中飞行时,机翼产生的升力抵消了重力,使无人机能够保持在空中。
- 阻力:阻力是与飞行方向相反的力,由空气对无人机的阻碍产生。
阻力会减少无人机的速度,并消耗能量。
- 推力:推力是沿着飞行方向的力,由发动机或电动机产生。
推力推动无人机向前飞行。
- 重力:重力是向下的力,由地球的引力产生。
重力作用下,无人机需要产生足够的升力才能保持在空中。
无人机的飞行控制主要通过调整姿态和推力来实现。
姿态调整通过控制尾翼的运动来改变无人机的姿态,从而实现俯仰和偏航运动。
推力调整通过调整发动机或电动机的输出来改变无人机的速度。
总结:本章详细介绍了无人机的结构和飞行原理。
无人机的结构包括机身、机翼、尾翼、起落架和传感器等组件。
无人机的飞行原理主要依靠升力、阻力、推力和重力等力的作用。
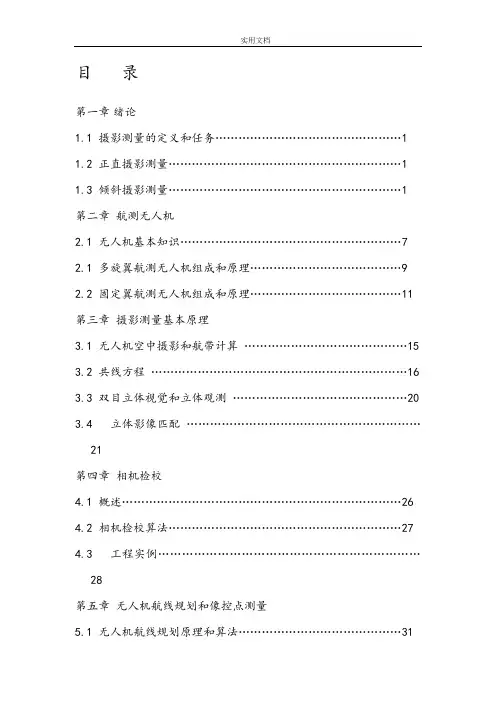
目录第一章绪论1.1 摄影测量的定义和任务 (1)1.2 正直摄影测量 (1)1.3 倾斜摄影测量 (1)第二章航测无人机2.1 无人机基本知识 (7)2.1 多旋翼航测无人机组成和原理 (9)2.2 固定翼航测无人机组成和原理 (11)第三章摄影测量基本原理3.1 无人机空中摄影和航带计算 (15)3.2 共线方程 (16)3.3 双目立体视觉和立体观测 (20)3.4立体影像匹配……………………………………………………21第四章相机检校4.1 概述 (26)4.2 相机检校算法 (27)4.3工程实例…………………………………………………………28第五章无人机航线规划和像控点测量5.1 无人机航线规划原理和算法 (31)5.2 无差分GPS无人机像控点布设与测量 (32)5.3带差分GPS无人机像控点布设与测量…………………………33第六章空中三角测量加密6.1 空三加密的目的和意义 (34)6.2 空三加密连接点的类型与设置 (35)6.2.1标志点刺点……………………………………………………356.2.2明显地物点刺点………………………………………………356.2.3影像匹配转点 (35)6.3光束法区域网空中三角测量 (35)6.3.1光束法区域网空中三角测量的基本思想与内容……………356.3.2解析空中三角测量的精度分析 (39)6.4 inpho摄影测量系统空三加密 (41)第七章矢量数据采集7.1 矢量数据采集基本算法 (41)第八章正射影像和数字高程模型8.1 真正射影像的概念和制作原理 (42)8.2 数字高程模型概念和采集方法 (46)8.3 商用摄影测量软件制作DOM和DEM方法 (48)8.3.1 inpho摄影测量系统生产DOM和DEM (49)8.3.2Pix4D生产DOM和DEM (50)第九章无人机倾斜摄影测量9.1 概况 (60)9.2 倾斜摄影测量原理 (60)9.2.1 密集匹配算法…………………………………………………619.2.2 纹理映射和细节层次模型……………………………………619.3 倾斜摄影测量相机 (62)9.4 商用倾斜摄影测量软件三维建模 (62)9.4.1Photoscan三维建模技术 (63)9.4.2 Smart3D三维建模技术………………………………………699.5 Photoscan三维建模软件操作具体步骤 (69)第一章绪论1.1 摄影测量的定义和任务国际摄影测量与遥感协会ISPRS(Intenational Society of Photogrammetry and Remote Sensing)1998年给摄影测量与遥感的定义是:摄影测量与遥感是从非接触成像和其他传感器系统,通过记录、量测、分析与表达等处理,获取地球以及环境和其他物体可靠信息的工艺、科学与技术(Photogrammetry and Remote Sensing is the art,science and technology of obtaining reliable information from noncontract imaging and other sensor systems about the Earth and its environment,and other physical objects and processes through recording,measuring,analyzing and representation )。

无人机培训教材第一章引言无人机,又称无人驾驶飞行器(UnmannedAerialVehicle,UAV),是一种通过遥控或自主飞行方式进行各种任务的航空器。
随着科技的发展,无人机在各个领域中的应用越来越广泛,如航拍、农业、物流、环境监测等。
为了确保无人机安全、高效地运行,提高无人机驾驶员的操作技能和理论知识,本教材旨在为无人机操作者提供全面、系统的培训内容。
第二章无人机基础知识2.1无人机分类与结构无人机按照用途可分为军用、民用和商业无人机;按照飞行原理可分为固定翼无人机、旋翼无人机和多旋翼无人机。
无人机的结构主要包括飞行器、导航系统、遥控系统、任务设备等部分。
2.2飞行原理与飞行性能无人机飞行原理主要包括空气动力学、飞行力学、飞行控制等。
飞行性能参数有飞行速度、飞行高度、续航时间、载重能力等。
2.3导航与飞控系统导航系统负责无人机的定位、导航和飞行路径规划。
飞控系统负责无人机的稳定飞行、姿态控制、自动起飞、着陆等功能。
第三章无人机操作技能培训3.1遥控器操作遥控器是无人机飞行操作的主要工具,操作者需熟练掌握遥控器的各个功能键、摇杆、开关等操作方法。
3.2起飞与着陆起飞与着陆是无人机飞行过程中最关键的操作环节。
操作者需掌握起飞、悬停、着陆等基本动作,确保无人机安全起飞和着陆。
3.3飞行姿态控制飞行姿态控制是无人机飞行过程中保持稳定的关键。
操作者需掌握无人机的前进、后退、上升、下降、左转、右转等飞行姿态控制方法。
3.4自动飞行与任务设备操作操作者需掌握无人机的自动飞行模式、航线规划、任务设备操作等技能,实现无人机的高效作业。
第四章无人机法规与安全4.1无人机法规无人机驾驶员需遵守国家关于无人机的相关法规,包括飞行空域、飞行高度、飞行速度等限制。
4.2飞行安全飞行安全是无人机飞行过程中的重要环节。
操作者需了解飞行安全知识,掌握应对突发状况的方法。
第五章无人机维护与保养5.1无人机检查与维护无人机在使用过程中需定期进行检查和维护,确保飞行安全。
无人机航拍摄影技术手册摄影是一门艺术,能够通过影像记录时间和空间的美丽瞬间。
而随着科技的不断发展,无人机航拍摄影技术的兴起为摄影师和爱好者们带来了全新的拍摄视角和可能性。
本手册将为您介绍无人机航拍摄影技术的基本知识、操作要点和拍摄技巧,帮助您掌握这一领域的核心技术。
一、无人机航拍摄影技术简介无人机航拍摄影技术是利用无人机设备进行航拍摄影的技术方法。
相比传统的地面拍摄或摄影飞机,无人机航拍摄影具有更高的灵活性和机动性,能够拍摄到平时难以接触到的角度和场景,丰富了摄影表达的可能性。
二、无人机航拍摄影设备1. 无人机选择适合航拍摄影的无人机是关键。
首先要考虑的是飞行稳定性和悬停能力,以确保拍摄到清晰稳定的画面。
另外,相机负载能力、航程和续航时间也是挑选无人机的重要因素。
2. 摄像设备无人机航拍摄影使用的摄像设备必须具备高画质和广角视野,以捕捉更多的细节和场景。
建议选择具备4K分辨率、机械云台稳定系统的无反光镜相机或运动相机。
三、无人机航拍摄影技术要点1. 飞行前准备在起飞前,确保无人机的电量充足并进行必要的系统检查。
检查气象条件,确保拍摄时风速和天气状况适宜。
此外,了解飞行区域的法规和限制,并与机场或相关部门进行联系,以确保安全合规。
2. 拍摄规划在飞行前,对拍摄地点进行规划。
考虑拍摄的目的、主题和构图,确定最佳的航线和飞行高度。
合理利用无人机的航拍特点,结合地形和景观进行创作。
3. 飞行操作技巧掌握无人机的基本操作技巧非常重要。
熟悉遥控器的各个控制按钮和摇杆,了解飞行姿态和飞行模式的切换。
平稳起飞、悬停、转向和降落是基本的操作要点。
同时,注意遵守航空安全法规,确保飞行安全。
4. 拍摄技巧航拍摄影需要掌握一些专业的拍摄技巧。
首先,稳定性是关键,保持无人机的稳定飞行,避免颠簸或晃动。
其次,注意光线条件,选择适当的拍摄时间和角度,以展现最佳的光影效果。
此外,巧妙运用运动轨迹和镜头调焦等技巧,能够增添影像的动感和层次感。
无人机航拍摄影与三维建模作业指导书第1章无人机航拍摄影基础 (4)1.1 无人机概述 (4)1.1.1 无人机类型 (4)1.1.2 功能指标 (4)1.1.3 我国相关法规 (5)1.2 航拍摄影设备选择 (5)1.2.1 无人机选择 (5)1.2.2 相机选择 (5)1.2.3 云台选择 (5)1.2.4 镜头选择 (5)1.3 航拍摄影技巧 (6)1.3.1 飞行路径规划 (6)1.3.2 拍摄角度选择 (6)1.3.3 相机参数设置 (6)第2章三维建模基本原理 (6)2.1 三维建模概念 (6)2.2 三维建模方法 (6)2.3 三维建模软件介绍 (7)第3章无人机航拍影像数据获取 (7)3.1 航线规划 (7)3.1.1 航线设计原则 (7)3.1.2 航线设计方法 (8)3.2 影像数据采集 (8)3.2.1 飞行前准备 (8)3.2.2 飞行过程控制 (8)3.2.3 数据传输与存储 (8)3.3 影像质量评估 (8)3.3.1 影像质量评价指标 (8)3.3.2 影像质量评估方法 (9)第4章影像预处理 (9)4.1 影像校正 (9)4.1.1 畸变校正 (9)4.1.2 地理校正 (9)4.2 影像配准 (9)4.2.1 特征提取 (9)4.2.2 特征匹配 (10)4.2.3 变换模型 (10)4.2.4 配准评估 (10)4.3 影像增强 (10)4.3.1 亮度调整 (10)4.3.2 对比度增强 (10)4.3.4 颜色校正 (10)第5章三维建模流程 (10)5.1 数据准备 (10)5.1.1 数据收集 (11)5.1.2 数据筛选 (11)5.1.3 数据预处理 (11)5.2 三维重建 (11)5.2.1 特征提取 (11)5.2.2 相机标定 (11)5.2.3 空间坐标计算 (11)5.2.4 网格 (11)5.2.5 纹理映射 (11)5.3 精度评估 (11)5.3.1 控制点精度评估 (11)5.3.2 重采样精度评估 (12)5.3.3 对比分析 (12)5.3.4 用户评估 (12)第6章三维模型优化与修饰 (12)6.1 模型优化 (12)6.1.1 优化目的 (12)6.1.2 优化方法 (12)6.2 模型纹理映射 (12)6.2.1 纹理映射原理 (12)6.2.2 纹理映射方法 (12)6.3 模型修饰与渲染 (13)6.3.1 模型修饰 (13)6.3.2 渲染输出 (13)第7章无人机航拍摄影在三维建模中的应用 (13)7.1 建筑物三维建模 (13)7.1.1 数据采集 (13)7.1.2 数据处理 (13)7.1.3 应用实例 (13)7.2 道路及地形三维建模 (13)7.2.1 数据采集 (14)7.2.2 数据处理 (14)7.2.3 应用实例 (14)7.3 其他领域应用 (14)7.3.1 水利工程 (14)7.3.2 矿产资源 (14)7.3.3 环境保护 (14)7.3.4 文化遗产保护 (14)7.3.5 农林业 (14)第8章三维模型可视化与交互 (14)8.1.1 三维模型数据结构 (15)8.1.2 三维模型渲染方法 (15)8.1.3 纹理映射与材质 (15)8.2 三维模型交互操作 (15)8.2.1 交互方式概述 (15)8.2.2 旋转、平移和缩放 (15)8.2.3 剖切与测量 (15)8.3 虚拟现实与增强现实应用 (15)8.3.1 虚拟现实技术概述 (15)8.3.2 增强现实技术概述 (15)8.3.3 三维模型在虚拟现实与增强现实中的应用 (15)第9章无人机航拍摄影与三维建模的安全与法规 (16)9.1 无人机飞行安全 (16)9.1.1 飞行前准备 (16)9.1.2 飞行操作 (16)9.1.3 应急处理 (16)9.2 数据安全与隐私保护 (16)9.2.1 数据存储与传输 (16)9.2.2 数据使用与管理 (16)9.3 相关法规与政策 (17)9.3.1 法律法规 (17)9.3.2 政策文件 (17)第10章无人机航拍摄影与三维建模实践案例 (17)10.1 案例一:城市建筑群三维建模 (17)10.1.1 无人机航拍摄影 (17)10.1.2 数据预处理 (17)10.1.3 三维建模 (17)10.1.4 模型质量控制 (18)10.2 案例二:考古遗址三维建模 (18)10.2.1 无人机航拍摄影 (18)10.2.2 数据预处理 (18)10.2.3 三维建模 (18)10.2.4 模型质量控制 (18)10.3 案例三:自然灾害监测与评估 (18)10.3.1 无人机航拍摄影 (18)10.3.2 数据预处理 (18)10.3.3 灾害评估 (18)10.3.4 三维模型应用 (18)10.4 案例四:大型工程三维监测与管理 (19)10.4.1 无人机航拍摄影 (19)10.4.2 数据预处理 (19)10.4.3 三维建模 (19)10.4.4 三维模型应用 (19)第1章无人机航拍摄影基础1.1 无人机概述无人机(Unmanned Aerial Vehicle,UAV)是一种不需要载人即可远程或自主控制飞行的航空器。
无人机培训教材第一章引言无人机,又称无人驾驶飞行器(UnmannedAerialVehicle,UAV),是一种通过遥控或自主飞行方式进行各种任务的航空器。
随着科技的发展,无人机在各个领域中的应用越来越广泛,如航拍、农业、物流、环境监测等。
为了确保无人机安全、高效地运行,提高无人机驾驶员的操作技能和理论知识,本教材旨在为无人机操作者提供全面、系统的培训内容。
第二章无人机基础知识2.1无人机分类与结构无人机按照用途可分为军用、民用和商业无人机;按照飞行原理可分为固定翼无人机、旋翼无人机和多旋翼无人机。
无人机的结构主要包括飞行器、导航系统、遥控系统、任务设备等部分。
2.2飞行原理与飞行性能无人机飞行原理主要包括空气动力学、飞行力学、飞行控制等。
飞行性能参数有飞行速度、飞行高度、续航时间、载重能力等。
2.3导航与飞控系统导航系统负责无人机的定位、导航和飞行路径规划。
飞控系统负责无人机的稳定飞行、姿态控制、自动起飞、着陆等功能。
第三章无人机操作技能培训3.1遥控器操作遥控器是无人机飞行操作的主要工具,操作者需熟练掌握遥控器的各个功能键、摇杆、开关等操作方法。
3.2起飞与着陆起飞与着陆是无人机飞行过程中最关键的操作环节。
操作者需掌握起飞、悬停、着陆等基本动作,确保无人机安全起飞和着陆。
3.3飞行姿态控制飞行姿态控制是无人机飞行过程中保持稳定的关键。
操作者需掌握无人机的前进、后退、上升、下降、左转、右转等飞行姿态控制方法。
3.4自动飞行与任务设备操作操作者需掌握无人机的自动飞行模式、航线规划、任务设备操作等技能,实现无人机的高效作业。
第四章无人机法规与安全4.1无人机法规无人机驾驶员需遵守国家关于无人机的相关法规,包括飞行空域、飞行高度、飞行速度等限制。
4.2飞行安全飞行安全是无人机飞行过程中的重要环节。
操作者需了解飞行安全知识,掌握应对突发状况的方法。
第五章无人机维护与保养5.1无人机检查与维护无人机在使用过程中需定期进行检查和维护,确保飞行安全。
目录第一章绪论1.1 摄影测量的定义和任务 (1)1.2 正直摄影测量 (1)1.3 倾斜摄影测量 (1)第二章航测无人机2.1 无人机基本知识 (7)2.1 多旋翼航测无人机组成和原理 (9)2.2 固定翼航测无人机组成和原理 (11)第三章摄影测量基本原理3.1 无人机空中摄影和航带计算 (15)3.2 共线方程 (16)3.3 双目立体视觉和立体观测 (20)3.4立体影像匹配……………………………………………………21第四章相机检校4.1 概述 (26)4.2 相机检校算法 (27)4.3工程实例…………………………………………………………28第五章无人机航线规划和像控点测量5.1 无人机航线规划原理和算法 (31)5.2 无差分GPS无人机像控点布设与测量 (32)5.3带差分GPS无人机像控点布设与测量…………………………33第六章空中三角测量加密6.1 空三加密的目的和意义 (34)6.2 空三加密连接点的类型与设置 (35)6.2.1标志点刺点……………………………………………………356.2.2明显地物点刺点………………………………………………356.2.3影像匹配转点 (35)6.3光束法区域网空中三角测量 (35)6.3.1光束法区域网空中三角测量的基本思想与内容……………356.3.2解析空中三角测量的精度分析 (39)6.4 inpho摄影测量系统空三加密 (41)第七章矢量数据采集7.1 矢量数据采集基本算法 (41)第八章正射影像和数字高程模型8.1 真正射影像的概念和制作原理 (42)8.2 数字高程模型概念和采集方法 (46)8.3 商用摄影测量软件制作DOM和DEM方法 (48)8.3.1 inpho摄影测量系统生产DOM和DEM (49)8.3.2Pix4D生产DOM和DEM (50)第九章无人机倾斜摄影测量9.1 概况 (60)9.2 倾斜摄影测量原理 (60)9.2.1 密集匹配算法…………………………………………………619.2.2 纹理映射和细节层次模型……………………………………619.3 倾斜摄影测量相机 (62)9.4 商用倾斜摄影测量软件三维建模 (62)9.4.1Photoscan三维建模技术 (63)9.4.2 Smart3D三维建模技术………………………………………699.5 Photoscan三维建模软件操作具体步骤 (69)第一章绪论1.1 摄影测量的定义和任务国际摄影测量与遥感协会ISPRS(Intenational Society of Photogrammetry and Remote Sensing)1998年给摄影测量与遥感的定义是:摄影测量与遥感是从非接触成像和其他传感器系统,通过记录、量测、分析与表达等处理,获取地球以及环境和其他物体可靠信息的工艺、科学与技术(Photogrammetry and Remote Sensing is the art,science and technology of obtaining reliable information from noncontract imaging and other sensor systems about the Earth and its environment,and other physical objects and processes through recording,measuring,analyzing and representation )。