CPⅢ高程网测量方法及其数据处理
- 格式:doc
- 大小:28.50 KB
- 文档页数:5

论无砟轨道CPⅢ控制测量数据处理摘要:随着时代的发展,我国的铁路建设事业逐渐进入到高速的、大规模的铁路建设阶段,因此,其核心技术在于精密工程的测量技术。
本文对无砟轨道CPⅢ的控制测量,特别是高程与施工测量数据进行了具体的处理与分析,希望能够促进高速铁路轨道建设的顺利开展。
关键词:无砟轨道;CPⅢ;测量目前,在无砟轨道的铁路控制测量当中,对于CPI和CPII的高程控制测量以及数据的处理都得到了妥善的解决,但是在CPⅢ的控制网测量中,还存在诸多有待解决的问题,本文就CPⅢ控制测量进行了分析探讨。
一、CPⅢ控制测量(一)布设CPⅢ控制点一般来说,CPⅢ控制点是在路基两侧布设,距离线路中线3~4m、隧道侧壁或者是桥梁防撞墙,相比轨道,高出大约0.30m左右的,相互等高。
一般来说,点与点之间保持60m左右的距离,但不得超过80m[1]。
对路基的CPⅢ控制点,一般在接触网的支柱上加以设置。
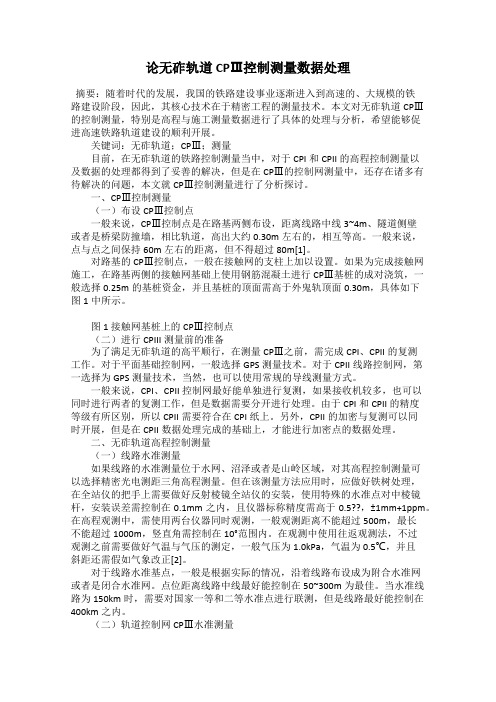
如果为完成接触网施工,在路基两侧的接触网基础上使用钢筋混凝土进行CPⅢ基桩的成对浇筑,一般选择0.25m的基桩资金,并且基桩的顶面需高于外鬼轨顶面0.30m,具体如下图1中所示。
图1 接触网基桩上的CPⅢ控制点(二)进行CPIII测量前的准备为了满足无砟轨道的高平顺行,在测量CPⅢ之前,需完成CPI、CPII的复测工作。
对于平面基础控制网,一般选择GPS测量技术。
对于CPII线路控制网,第一选择为GPS测量技术,当然,也可以使用常规的导线测量方式。
一般来说,CPI、CPII控制网最好能单独进行复测,如果接收机较多,也可以同时进行两者的复测工作,但是数据需要分开进行处理。
由于CPI和CPII的精度等级有所区别,所以CPII需要符合在CPI纸上。
另外,CPII的加密与复测可以同时开展,但是在CPII数据处理完成的基础上,才能进行加密点的数据处理。
二、无砟轨道高程控制测量(一)线路水准测量如果线路的水准测量位于水网、沼泽或者是山岭区域,对其高程控制测量可以选择精密光电测距三角高程测量。

CPIII 测量解决方案CP III即轨道控制网,是沿线路两侧布设的三维控制网,平面控制起闭于基础平面控制网(CP I)或线路控制网(CP II),高程控制起闭于沿线路布设的二等水准网,一般在线下工程施工完成后施测,为无砟轨道铺设和运营维护的基准控制网。
CPIII 测量解决方案包含CPIII作业的全部硬件和软件,适用于CPIII控制网的布设、测量与维护。
系统精确、可靠、效率高,已在郑西客专、京沪高铁等国内多条高速铁路中得到广泛应用。
CPIII布设系统组成布设CPIII控制点的要求1、基础稳定、安全不易破坏2、易于维护,方便架设棱镜3、控制点易于均匀分布4、线路两侧CPⅢ点布设相对应CPIII控制点观测流程根据布控的CPIII控制网采用设计院提供的专业数据采集软件,进行外业的数据采集观测。
平面测量:使用全站仪自由设站方式,边角后方交会方法观测CPIII点,简单示意图如下:注意事项:1、每隔二对CPIII棱镜(约120m)进行自由建站2、两个方向各观测2×3对CPIII控制点3、每个CPIII控制点至少观测3次以上4、每个测站观测2-4个完整测回5、与CPI、CPII通视时联测CPI、CPII控制点6、CPIII点的编号应统一(左侧为奇数,右侧为偶数)7、测量人员操作过程中要严格按照规范要求,避免不必要的人为误差8、棱镜常数的设置要正确,避免增加内业处理的工作量。
9、外业观测时,必须设定气压和温度指标。
10、仪器自由设站,无须测量仪器高。
高程测量:CPIII点高程测量采用精密电子水准仪,利用高精度电子水准仪按照中视测量方法或环形测量方法把CPI、CPII与CPIII点联测起来即可,进行内业平差计算,从而得到CPIII点的高程。
注意:在观测CPIII点高程时,需要将水准仪架设在线路的中心线上或闭合环的中心点上,以便保证前后视距近似相等,减小 i 角误差。
CPIII控制点成果整理将外业观测所得数据传输到电脑上,采用专业的CPIII平差处理软件进行成果整理,我们提供的平差软件有铁三院的TSDI_HRSADJ、铁二院的CPIII DAS、铁一院的Trimble DAS 及西南交大与中铁八局后处理软件等。


摘要 (IV)第一章任务概述 (1)1。
1任务名称 (1)1。
2设计依据 (1)1.3CPⅢ轨道控制网测量主要内容 (1)1.4工程概况 (2)1。
5地理环境 (2)1。
6既有精测网情况 (2)2.1.1精测网的资料 (2)1。
6。
2平面控制网 (3)1。
6。
3高程控制网 (4)第二章精测网复测 (4)2.1平面控制网复测 (4)2.1。
1 CPⅠ网复测 (4)2.1.2 CPⅡ网复测 (5)2。
1。
3 使用仪器 (5)2.1.4 CPⅠ和CPⅡ测量作业技术要求 (6)2。
1.5 精度要求 (6)2.2高程控制网复测 (8)2。
2。
1高程复测 (8)2。
2。
2使用仪器 (8)2.2.3二等水准测量的精度要求 (9)2.2。
4二等水准测量的主要技术标准 (9)2。
2。
5高程测量作业要求 (9)2.2.6 高程网平差处理及复测成果评价标准 (11)2。
3线下工程沉降和变形评估 (11)2。
4CPⅢ网测量工装准备 (11)第三章 CPⅢ网测量标志选用和埋设 (12)3。
1CPⅢ网点测量标志选择 (12)3.2CPⅢ网点的埋设 (13)3.2。
1 CPIII点的编号 (13)第四章 CPⅡ控制网加密测量 (14)4。
1CPⅡ加密方法 (14)4。
2CPⅡ加密点网标埋设与检测 (14)4.3CPⅡ加密点的平面分布 (15)4。
4观测方法 (15)4。
5观测要求 (15)4。
6数据处理 (15)第五章 CPⅢ控制网测量 (16)5。
1CPⅢ控制网平面测量 (16)5。
1.1 CPⅢ布网形式 (16)5.1.2测量方法及精度要求 (17)5.1.3观测时段的选择 (17)5.1.4测量要求 (18)5.1.5主要技术指标 (19)5。
1。
6现场记录 (20)5。
1。
7 CPIII外业测量注意事项 (21)5。
1.8 CPⅢ控制网平面数据处理与评估 (22)5。
2CPⅢ控制网高程测量 (22)5。
2.1测量方法 (22)5。

高速铁路桥梁无砟轨道CPⅢ测量技术摘要高速铁路铁路无砟轨道对线路稳定性和平顺性的极高。
在本文主要介绍桥梁无砟轨道(CPⅢ)施工期间的测量技术和注意事项。
关键词无砟轨道;CPⅢ;平面;高程;测量0 引言为解决无砟轨道高平顺和稳定性要求,目前,我国已在高速铁路线路勘察、施工、运行维护期间建立统一的平面、高程控制网和计算基准。
主要包含框架平面控制网(CP0)基础平面控制网(CPⅠ)、线路平面控制网(CPⅡ)、轨道控制网(CPⅢ)。
在施工期间需对桥梁按设计要求进行沉降观测,保证线路的稳定性。
桥梁架设完成后,利用已有的CP0、CPⅠ、CPⅡ测量网,建立无砟轨道施工测量网CPⅢ,由CP Ⅲ控制轨道的平顺性。
1 CPⅢ测量时间桥梁架设完毕、沉降稳定评估通过,在线路防撞墙上设置CPⅢ网,并进行第一次测量平差。
利用CPⅢ网采用后方交汇模式放样轨道基础及轨道板精调控制点(GRP);进行CPⅢ第二次测量平差,利用平差后数据测量平差轨道板精调控制点(GRP点);轨道板铺设完毕钢轨铺设之前进行CPⅢ第三次测量平差,用于长钢轨的精调施工。
2 CPⅢ测量点的埋设及命名CPⅢ标志一般埋设于梁固定支座上方、防撞墙顶部中间,线路方向与左右方向偏差均不大于±10mm,预埋件的中心线与竖直方向的夹角不大于5°,然后隔一孔梁(约65m处)埋设于相同的位置;非标梁和连续梁每50m~80m处埋设一对CP Ⅲ标志,不要设置在梁的中间部位。
防撞前施工完毕后在相应的防撞墙顶部采用冲击钻打孔直径为10cm,深10cm的孔,使用支座灌浆砂浆将CPⅢ预埋件买入防撞墙,预埋件顶部高于防撞墙顶部1mm~2mm。
注意加盖CPⅢ保护套。
CPⅢ点按照公里数递增进行编号,其编号反映里程数;CPⅢ点以数字CPⅢ为数字代码,所有处于线路上行线轨道左侧的标记点,编号为奇数,处于上行线轨道右侧的标记点编号为偶数,在有长短链地段应注意编号不能重复。
3 CPⅢ平面测量3.1 CPⅢ条件CPⅢ观测应在气象条件相对比较稳定的天气下进行(温差变化较小,湿度较小,如阴天),夜间观测应避免强热光源对观测的影响,观测时段的选择应遵循如下的原则:1)应尽量选择无风的阴天进行;2)应完全避开日出,日落、日中天的前后1h 的时段进行观测;3)如果允许,首先应选择夜晚无风的时段观测。
CPⅢ测量线下基础工程完工并经铺轨条件评估合格后,按照规范要求对线路中线进行复测,保证施工结构尺寸、位臵、高程满足设计要求并在限差范围内。
在无砟轨道施工前,首先建立无砟轨道基桩控制网(CP Ⅲ),在建立之前对原交桩的控制网(CPI、CPⅡ)进行复核测量,检查其桩位是否移动、破坏,以确保无砟轨道施工控制网与线下施工控制网的坐标系统一致。
1)线路复测线下基础工程经无砟轨道铺设条件评估合格后,进行线路中线复测,并完成基桩控制网(CPⅢ)的建立。
线路复测进行线路中线和高程测量,贯通全线的里程和高程,并检查线下工程施工的准确性。
路基、桥梁满足限界要求。
直线地段每隔50m、圆曲线上每隔20m、缓和曲线上每隔10m设一个桩。
在缓和曲线、圆曲线起讫点、水硬性混凝土厚度变更点以及道岔交点等加设永久中桩,以及埋设简易的临时里程标、曲线标、坡度标等标志。
2)建立基桩控制网(CPⅢ)无砟轨道施工前,完成基桩控制网(CPⅢ)的建立,基桩控制网布臵成三维坐标网,并与基础平面控制网(CPI)或线路控制网(CPII)进行衔接。
CPⅢ高程测量工作在CPⅢ平面测量完成后进行,并起闭于二等水准点。
基桩控制网(CPⅢ)最终为三维坐标,即每个CPⅢ控制点集平面、高程于一体。
3)基桩控制网(CPⅢ)布设①路基上基桩控制网(CPⅢ)的布设路基上基桩控制网(CPⅢ)沿线路纵向左右对称布臵(间距为50~60m),因目前接触网支柱尚未安装,在接触网小里程端设计牛腿基础,并预埋Φ200mm的临时钢筋混凝土作为CPⅢ基标桩,并高出路肩1.4m。
CPⅢ控制点布设时高出设计轨顶面35cm,布设(钻孔锚固)M8×25mm的螺栓(内螺栓孔径为8mm),用螺帽拧紧。
安装棱镜时在螺栓上拧上直径为12mm的专用测量连接螺栓。
②桥上基桩控制网(CPⅢ)的布设桥上基桩控制网(CPⅢ)分布于线路的两侧,并设臵在桥梁变形量最小的部位(即垂直于桥梁基座固定端的防撞墙上),CPⅢ控制点设臵在线路两侧防撞墙的内侧,低于上表面10cm处。
CPⅢ高程网测量方法及其数据处理摘要简单介绍铁路客运专线建设CPⅢ高程控制网测量及平差方法关键词CPⅢ高程控制网测量德国中视法观测平差方法1 前言目前国内铁路客运专线建设中CPⅢ高程控制网测量方法主要包括德国中视法、中国矩形法和三角高程法。
德国中视法是一种水准测量方法,其特点是测量精度高,测量原理及方法明晰,本文就德国中视法测量方法及数据平差处理做具体介绍。
2测量方法德国中视法采用水准测量往返观测的方法进行,往测时以线路一侧(图2-1下方)的CPⅢ点为主线进行水准测量,而另一侧的CPⅢ点(图2-1上方)在进行水准测量时作为中视进行观测,其往测水准路线如图2-1所示。
返测时以另一侧的CPⅢ点为主线进行水准测量,而对侧的CPⅢ点在进行水准测量时也是作为中视进行观测,返测水准路线如图2-2所示。
CPⅢ点与线路水准基点每两公里应联测一次,联测线路水准基点时也应按照往返测的方法进行。
从图2-1和图2-2中可以看出,任何一段CPⅢ高程网均由两条附合路线组成,这两条附合路线均起闭于CPⅢ高程网线路两端的二等水准基点上。
图2-1 德国中视法往测路线示意图图2-2 德国中视法返测路线示意图3数据处理采用电子水准仪(天宝DINI12)完成一测段德国中视法测量后获得如图3-1a和图3-1b的数据。
其中Rb为后视,Rf为前视,HD为视距,Z为高程。
完成往返测量后,构成如图3-2的高差闭合环。
图3-1a 测量高程控制点与CPⅢ控制点高差观测数据图3-1b 第一测站和第二测站数据图3-2 德国中视法高差闭合环示意图3.1 平差方法经典平差方法包括:条件平差、间接平差、附有参数的条件平差、附有限制条件的间接平差和附有限制条件的条件平差五种平差方法。
基于德国中视法的高差闭合环网形和利于计算机处理,德国中视法平差模型选择间接平差模型。
选取待定点的高程作为未知参数,搜索闭合环网形中与已知点发生联系的待定点,计算出此待定点的高程值并将其作为新的已知点,循环搜索直到所有待定点的高程都被解算出来,从而完成所有待定点近似高程的推算。
CP Ⅲ网的平面与高程数据处理平面部分一、平面数据处理 1. 生成平差文件2. 闭合环搜索的原理二、平面平差计算 1.解算概略坐标2.误差方程的开列与观测值权值的确定2.1距离和水平方向观测值误差方程的开列由于CP Ⅲ平面网为自由测站边角交会网,即观测量中有水平距离和水平方向值,要对其进行平差计算,首先应该对各观测值开列误差方程。
1)距离误差方程假定距离观测值为S ,距离改正数为S v ,待定点近似坐标为00Y X 、及改正量为y x δδ、,则有如下的平差值方程式:200200)]()[()]()[(ii j j i i j j S ij y Y y Y x X x X v S ij δδδδ+-+++-+=+ (1) 上式按泰勒公式展开,舍弃掉二次及多次项,取一次项得距离误差方程式为:)(00000000000ij ij j iji j j ijij i iji j i ijij S S S y SY Y x SX X y SY Y x SX X v ij ---+-+----=δδδδ (2)上式中,近似距离2002000)()(i j i j ij Y Y X X S -+-=。
2)水平方向误差方程假定水平方向观测值为L ,其改正数L v ,待定点近似坐标为00Y X 、及改正量为y x δδ、,则有如下的平差值方程式:)()()()()tan(0000i ij ji i j j i L ij x X x X y Y y Y w v L ij δδδδ+-++-+=++ (3)上式按泰勒公式展开,舍弃掉二次及多次项,取一次项得水平方向误差方程式为:000000000202020200""""[()]ij j i j ij i j i L i i j jijijijiji ij ij i Y Y X X Y Y Y Y v x y x y SSSSw T L w ρδρδρδρδδ----=--+---+ (4)上式中:ρ=206265″,00000arctanij i j ij X X Y Y T --=。
CPⅢ高程网测量方法及其数据处理
摘要简单介绍铁路客运专线建设CPⅢ高程控制网测量及平差方法
关键词CPⅢ高程控制网测量德国中视法观测平差方法
1 前言
目前国内铁路客运专线建设中CPⅢ高程控制网测量方法主要包括德国中视法、中国矩形法和三角高程法。
德国中视法是一种水准测量方法,其特点是测量精度高,测量原理及方法明晰,本文就德国中视法测量方法及数据平差处理做具体介绍。
2测量方法
德国中视法采用水准测量往返观测的方法进行,往测时以线路一侧(图2-1下方)的CPⅢ点为主线进行水准测量,而另一侧的CPⅢ点(图2-1上方)在进行水准测量时作为中视进行观测,其往测水准路线如图2-1所示。
返测时以另一侧的CPⅢ点为主线进行水准测量,而对侧的CPⅢ点在进行水准测量时也是作为中视进行观测,返测水准路线如图2-2所示。
CPⅢ点与线路水准基点每两公里应联测一次,联测线路水准基点时也应按照往返测的方法进行。
从图2-1和图2-2中可以看出,任何一段CPⅢ高程网均由两条附合路线组成,这两条附合路线均起闭于CPⅢ高程网线路两端的二等水准基点上。
图2-1 德国中视法往测路线示意图图2-2 德国中视法返测路线示意图
3数据处理
采用电子水准仪(天宝DINI12)完成一测段德国中视法测量后获得如图3-1a和图3-1b的数据。
其中Rb为后视,Rf为前视,HD为视距,Z为高程。
完成往返测量后,构成如图3-2的高差闭合环。
图3-1a 测量高程控制点与CPⅢ控制点高差观测数据
图3-1b 第一测站和第二测站数据
图3-2 德国中视法高差闭合环示意图
3.1 平差方法
经典平差方法包括:条件平差、间接平差、附有参数的条件平差、附有限制条件的间接平差和附有限制条件的条件平差五种平差方法。
基于德国中视法的高差闭合环网形和利于计算机处理,德国中视法平差模型选择间接平差模型。
选取待定点的高程作为未知参数,搜索闭合环网形中与已知点发生联系的待定点,计算出此待定点的高程值并将其作为新的已知点,循环搜索直到所有待定点的高程都被解算出来,从而完成所有待定点近似高程的推算。
按间接平差法进行平差计算,在近似高程推算出来后,接着要进行的就是开列高差观测值的误差方程。
假定两CPⅢ点点和点高程平差值分别为和,近似高程分别为和,近似高程改正数分别为和;、两CPⅢ点间的高差值为,改正数为,则有如下的平差值方程式:
(3-1)
由于高程平差值等于近似高程加改正数,因此上式可改化为如下的形式:
(3-2)
对上式进行整理后得高差误差方程式为:
(3-3)
所有水准测量均是按照同一测量方法观测,故采用观测值的线路长度来定权。
为选定的某一正数。
则观测值的全有:
(3-4)
根据推导的观测量的误差方程(式3-3),可组成间接平差误差方程的矩阵形式:
(3-5)
式中,常数项向量。
按最小二乘原理,可得法方程为:
(3-6)
式中,,其秩为,亦即非奇异,存在逆矩阵,所以法方程的解唯一为:
(3-7)
那么,未知参数平差值为:
(3-8)
把式(3-7)未知参数的解,带入式(3-5)即得观测量改正数的值,那么观测量平差值可按下式计算:
(3-9)
参数平差完成后,利用观测值向量权阵、平差后得到的改正数、未知数协因数阵等信息,可以进行CPⅢ高程网平差精度的评定,也即评定控制网中各CPⅢ点高程点位精度和相邻CPⅢ点间高差的相对点位精度。
首先评定控制网中各CPⅢ点高程的点位精度。
平差后观测值单位权中误差计算公式为:
(3-10)
式中,是各类观测值改正数的加权平方和,为观测值总个数,为未知数的总个数,为多余观测数。
通常平差后计算的,应与验前的单位权中误差在数值上接近。
平差时是以待定点的高程作为未知参数的,即,式中为待定点个数,根据协因数传播律可得未知参数协因数阵为。
矩阵中的对角线元素称为第个未知数的权倒数。
则各待定点平差后的高程中误差可按下式计算:
(3-11)
两点间高差平差值的中误差为:
(3-12)
3.2 算例
本文采用由中铁二院和西南交大共同研制的CPⅢ数据平差计算软件作为算例解算软件。
CPⅢ数据平差计算软件(CPⅢDAS,CPⅢData Adjustment Software),是专为我国无砟轨道客运专线铁路施工中CPⅢ内业数据平差而设计的内业数据
处理软件。
图3-3 CPⅢ数据平差计算软件主界面
CPⅢDAS软件高程数据处理部分包括建立项目、生成高差文件、生成平差文件、闭合差计算、网平差处理、输出观测手薄等功能。
新建项目如图3-4,根据“高程数据处理”和“高程数据平差”下拉菜单依次完成数据处理。
图3-4 新建项目
图3-5 高程数据处理
图3-6 高程数据平差
处理参数设置时应注意选择仪器类型和转点类型,因为不同仪器采集的数据格式不同,如果这里出错会导致读入数据错误。
转点类型是指水准测量所设置的转点,因为CPⅢ控制点是以数字编号的,所以一般转点是以字母开头编号的,如果选择错误会导致平差软件无法构建CPⅢ闭合环网形。
图3-7 设置处理参数界面
生产的平差文件格式为:
测段起点A1,终点A2,高差(m),距离(km)
测段起点B1,终点B2,高差(m),距离(km)
……
控制点既可导入已有文件,也可手工录入控制点数据。
注意控制点录入格式为:
图3-8 控制点高程录入
处理完毕后生产高程网平差结果文件如图3-9所示。
图3-9 高程平差结果文件
高程平差结果文件包括:1、已知高程;2、计算的概率高程;3、测段实测高差数据统计;4、高程平差值及其精度;5、高差平差值及其精度;6、高程控制网总体信息。
4结束语
德国中视法是最早运用到CPⅢ高程网测量的水准测量方法,有着成熟的理论和数据处理手段。
但是由于网形不对称以及各点精度不均匀加之测量需要往返测量,同一位置需要两次设站,降低了工作效率。
在实际工作中,其测量方法还需进一步改进。
注:文章内的图表、公式请到PDF格式下查看。