广义预测控制原理-江苏科技大学
- 格式:docx
- 大小:27.13 KB
- 文档页数:6

浙江大学博士学位论文摘要fI亡当面鎏I控赳作为预测控制中最具代表性的算法之一,多年来一直是研究领域最为活跃的预测控剑簋法。
它融合了预测控制与自适应控制的优点,可直接处理输入、输出约束,并对过程的时滞及阶次估计不准有好的鲁棒性,能适用于开环不稳定和非最小相位系统。
目前,线性单变量系统的广义预测控制理论发展得较为成熟,但实际中往往是多变量、非线性系践两方面的研究,主要内容如下:1.从算法、理论和应用三个方面概述了预测控制的发展历史及现状,重点介绍了广义预测控制及其改进算法。
机制能有机地结合起来,对系统的阶次估计不准有好的鲁棒性。
|}—-,3.I由于很难用常规方法获得非线性系统的精确模型,而神经网络具有能逼近任~非线性系统的能力,因此用神经网络实现非线性预测控制是处理复杂非线性问题的一种通用思路J‘本文提出了先用递归神经网络将非线性过程全局反馈线性化,然后在此基础上设计约束广义预测控制器的方法,并在控制算法中考虑了线性化带来的模型误差。
f对连续搅拌槽反应器的仿真说明了该算法的有效性。
k一4.;对预测控制器进行鲁棒性分析和设计一直都是预测控制研究领域的难点。
竭‘文结合模型误差上界的频域辨识结果和小增益理论分析了存在建模误差时广义预测控制器的稳定性,根据对模型误差上界的估计给出基于图形的鲁棒广义预测控制器的参数整定方法,并将这一结果应用于PUMA500机器人的关节力控制系统的鲁棒参数设计。
浙江大学博士学位论文5.推导了有约束的多变量广义预测控制算法,并给出状态空间实现。
(对Shell分馏塔的仿真研究结果表明,算法能有效地处理过程时滞和非最小相位特性,有良好的解耦性能,在跟踪性、抗干扰性等方面的控制效果优于动态矩阵控制算法。
}一—76简要概述了国内外催化裂化装置先进控制的现状,并根据我国催化裂化工业的具体情况,提出一些具有实际意义的建议。
7阳汽油的干点和轻柴油的倾点是反映流化催化裂倔主分馏塔产品质量指标的重要参数,但由于种种困难很难获得。
51卷第3期(总第192期)中国造船V ol.51 No.3 (Serial No. 192) 2010年9 月 SHIPBUILDING OF CHINA Sep. 2010文章编号:1000-4882 (2010) 03-0154-08船舶动力定位系统的广义预测控制方法研究齐亮1,2,俞孟蕻1(1. 江苏科技大学电子信息学院,镇江 212003;2. 江苏大学机械工程学院,镇江 212000)摘要船舶在海上的航行是一种复杂的非线性运动,其水动力参数很难精确确定,并且会遭遇来自风、流和浪的随机干扰;因此,船舶须要具有鲁棒性和自适应能力的动力定位系统。
鉴于广义预测控制算法在非线性控制方面的独特优势以及神经网络具有自学习和自适应的能力,作者研究了基于支持向量机的广义预测混合控制算法,并将其应用于船舶动力定位系统。
仿真结果表明,该方法具有较好的鲁棒性和自适应性,提高了动力定位系统的精度和性能。
关键词:船舶;动力定位;支持向量机;广义预测控制中图分类号:U666.124 文献标识码:A0 引言船舶动力定位系统(Dynamic Positioning System,简称为DPS),是指在不借助锚泊系统、利用自身推进装置,有效地产生反力和反力矩,以抵抗风、流和浪作用于船上的环境外力和力矩,维持船舶在给定位置,或使船舶精确地跟踪某一给定轨迹。
DPS主要用于海上作业的船舶(如:科学考察船、深海救生船、生产油轮、潜水器支持船、平台支持船、管道和电缆敷设船)和海上平台(海洋钻井平台等)的定点系泊;此外,还可用于无人自治潜水器(AUV)或其它类型潜水器的轨迹控制。
相对传统系泊形式(如锚泊系统等),它定位精度更高、灵活性更好、适用于多种海况、机动性强、成本不随水深增加而增加、操作方便,对于海洋开发和海军现代化建设均具有重要的意义[1]。
船舶在海上的动力学特性具有强耦合、非线性、大时滞和大惯性等特点,很难用精确的数学模型进行描述;并且风、流和浪等外部随机干扰的统计特性也随着不同海况发生很大的变化。
广义预测控制理论1引言预测控制思想主要是在70年代形成的,进人80年代后,随着模型算法控制(MAC)的问世,相继出现了动态矩阵控制(DMC)、扩展时域预测自适应控制(EPSAC)等结构各异的预测控制算法,这些算法分别基于有限脉冲响应和有限阶跃响应模型,算法简单,容易实现,1984年,Clarke及其合作者在上述算法的基础上,提出了广义预测控制(GPC)思想及基本方法,GPC基于参数模型,引入了不相等的预测水平和控制水平,使系统设计更灵活。
由于广义预测控制具有预测模型、滚动优化和反馈校正三个基本特征,因而具有优良的控制性能和鲁棒性,被认为是具有代表性的预测控制算法之一并被广泛应用于过程工业中。
近年来,广义预测控制吸引了众多学者对其进行研究国际上,各大控制会议和杂志对它也非常关注,近10年来的美国控制会议(ACC)、IEEE决策与控制会议(CDC)和国际自动控制联合会(IFAC)世界大会几乎每年都有关于预侧控制的专题分组及以预侧控制为主题的工作讨论会,1995年在韩国又召开了关于预测控制的国际讨论会,在广义预测控制方面也发表了不少综述文献和著作。
2广义预测控制2.1广义预测控制的基本算法GPC采用如下CARIMA模型来描述系统A(z ' )y(t) = B(z ')u (t -1) C (z (t) / :其中A(z」),B(z'),C(z')分别是阶数位的n a,n b,n c的z J的多项式,A(z‘)和C(z‘)是首一多项式,{u(t)},{y(t)},「(t)}分别表示系统的输入、输出和白噪声序列,‘刊。
广义预测控制使用如下的二次目标函数N2 NMJ =E{ ' [y(t k) 一,(t k)]2亠二;[:u(t k -1)]2} (2.1.2) k 出1 k =1其中,N1,N2分别为最小、最大预测长度,N M为控制长度,满足关系仁N「N2,N M乞N2且当k>N2时看,假定u(t k-T,■为控制加权序列,(2.1.1)■'(t k)是经柔化后的参考值,在GPC 中,不要求对象输出直接跟踪设定值'■, 只要求y(t)沿着参考轨迹到达设定值■。

广义预测控制算法及实例分析一.广义预测控制算法1.广义预测控制的提出广义预测控制是预测控制中三种常见算法之一。
预测控制的提出并不是某一种统一理论的产物,而是源于工业实践,并在工业实践过程中发展和完善起来的一类新型计算机控制算法。
预测控制不会过分依赖被控对象的精确数学模型,能很好的应对工业对象的结构、参数的不确定性,且用工业计算机较容易实现。
2.广义预测控制的基本原理广义预测控制是预测控制中最具代表性的算法,他有三方面的特点:基于传统的参数模型,模型参数少;是在自适应发展过称中发展起来的,保留了自适应发展的优点且更具鲁棒性;采用多步预测、滚动优化、反馈校正更适于工业应用。
广义预测控制基本原理:预测模型、滚动优化、反馈校正预测模型:预测控制的模型称为预测模型。
预测控制对模型的要求只强调其功能而非结构,只要模型可利用过去己知数据信息预测系统未来的输出行为,就可以作为预测模型。
在DMC、MAC等预测控制策略中,采用了阶跃响应、脉冲响应等非参数模型,而GPC预测控制策略则多选择CARIMA参数模型。
滚动优化:预测控制是一种优化控制算法,通过某一性能指标的最优来确定未来的控制作用。
预测控制的优化标准不是采用一成不变的全局最优化目标,而是采用滚动式的有限时域优化策略。
优化不是一次离线进行,而是反复在线进行。
在每一采样时刻,优化性能指标只涉及到未来有限的时域,而到下一采样时刻,这一优化时域同时向前推移。
因此,预测控制在每一时刻有一个相对于该时刻的优化性能指标,即实现滚动优化。
反馈校正:预测控制算法在进行滚动优化时,优化的基点应与系统实际一致。
但作为基础的预测模型,只是对象动态特性的粗略描述,可能与实时状态不慎符合。
这就需要用附加的预测手段补充模型预测的不足,或对基础模型进行在线修正。
预测控制算法在通过优化确定了一系列未来的控制作用后,每次只是实施当前时刻的控制作用。
到下一采样时刻,则首先检测对象的实际输出,并利用这一实时信息对基于模型的预测进行修正,然后再进行新的优化。
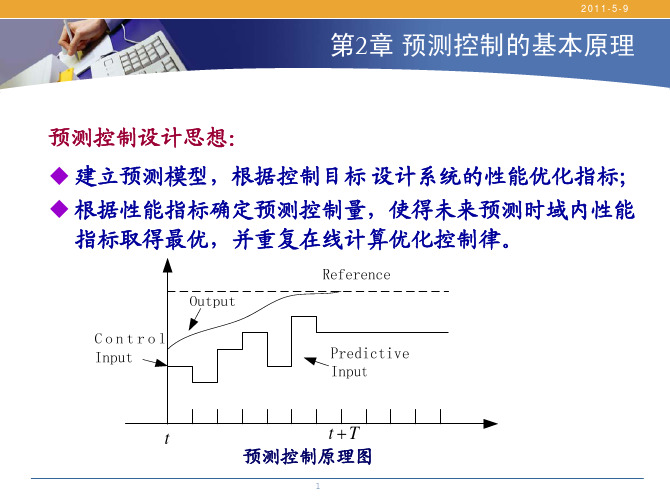
预测控制的基本原理预测控制是一种控制方法,旨在根据当前系统状态和过去的行为数据,预测未来的系统行为,并采取相应的控制策略以优化系统性能。
预测控制的基本原理包括模型建立、预测、优化和执行等步骤。
首先,预测控制的第一步是建立系统的数学模型。
模型可以是基于物理原理的物理模型,也可以是基于实验数据的经验模型或黑盒模型。
在预测控制中,我们需要将系统状态和输入量映射到输出量上,以描述系统的动态行为。
其次,预测控制的第二步是使用建立好的模型来进行预测。
通过观测系统的当前状态和过去的行为数据,我们可以利用模型预测系统未来的行为。
常用的预测方法包括基于回归分析的线性预测、基于时间序列的ARMA模型、基于神经网络的非线性预测等。
预测结果可以是系统的未来状态、输出或性能指标。
第三步是优化控制策略。
在预测控制中,我们可以使用优化算法,如最优控制、模型预测控制等,以根据预测的系统行为优化控制策略。
优化目标可以是最小化误差、最大化系统性能或满足约束条件等。
通过优化控制策略,我们可以使系统在未来的行为中达到期望的状态或性能。
最后,执行控制策略是预测控制的最后一步。
根据优化得到的控制策略,我们可以将其转化为具体的控制指令,并应用于实际控制系统中。
执行控制策略的方式取决于具体的系统,可能是调整参数、改变输入量、控制开关或阀门等。
通过执行控制策略,我们可以实现对系统的实时控制和调整,使系统在未来的行为中接近预测的结果。
预测控制作为一种先进的控制方法,在许多领域都得到了广泛的应用。
例如,在工业生产中,预测控制可以用于优化生产过程,提高生产效率和产品质量。
在交通系统中,预测控制可以用于交通流量的预测和调度,减少交通拥堵和排放。
在能源管理中,预测控制可以用于优化能源的使用,降低能源消耗和碳排放。
在自动驾驶和机器人领域,预测控制可以用于判断和预测环境中的障碍物,实现安全和高效的运动。
总结来说,预测控制是一种基于系统模型和预测方法的控制方法,通过预测系统未来的行为,优化控制策略并执行控制指令,以达到系统性能的优化。
PI型广义预测控制算法及其在温度控制中的应用研究摘要广义预测控制(Generalized Predictive Control)是80年代产生的一种新型计算机控制方法是预测控制中最具有代表性的算法之一,它一出现就受到了国内外控制理论界和工业界的重视成为研究领域最为活跃的一种预测控制算法。
本文对广义预测控制理论进行深入研究,包括其基本理论、算法的优点及一些重要参数对系统性能的影响,使用Matlab和Visual Basic软件编写程序,实现PI型广义预测控制算法对工业过程常见的一阶、二阶带纯滞后对象的控制仿真,并将该算法应用于温度控制,得到了良好的控制效果.该算法对模型的精度要求不高,具有多步预测、滚动优化和反馈校正三个基本特征,具有优良的控制性能和鲁棒性,由于在优化中引入了多步预测思想,使其抗扰动及时延变化等能力显著提高。
主要工作内容如下:(1)研究了广义预测控制算法和传统的PID控制算法的原理,并分析比较了它们在实际应用中的优缺点。
(2)研究了基于GPC的PI型控制算法,将其应用于温度控制,并用MATLAB仿真,仿真结果表明,该算法在快速性和稳态性能方面均有较优秀的表现。
关键词:PI广义预测控制(GPC),系统仿真,丢番图方程,温度控制THE STUDY OF PI TYPE GENERALIZED PREDICTIVE CONTROL AND ITS APPLICATION INTEMPERATURE PROCESSABSTRACTGeneralized Predictive Control (GPC), which appeared in 80’s, is a new type of computer control method and one of the most representative algorithm. It has received increasing attention in the field of control and industry.The generalized predictive control was researched in the paper concluding the basic theory, the advantage of the algorithm and the effect of some important parameters. Matlab and Visual Basic are adopted to programming. Furthermore, simulation research was done for the first order and the second order model of industry process. Also, the algorithm was applied on temperature process. GPC algorithm doesn’t depend on exact model, which has three characters in the forms of multiple forecasting, roll optimize and feedback correction. Meanwhile, it shows well qualities of control and great robust. The ability of disturbance rejection and time-varying restraining has been enhanced greatly with the multi-step forecasting concept. The main idea is as follows,(1) The principles of the generalized predictive control and the traditional PID control were analyzed, and their advantages and defaults in practice were compared.(2) The PI type generalized predictive control and its application in temperature control was studied. Matlab simulation research showed that the improved algorithm can obtain better control effect in both the response time and the steady-state performance.Key words: PI type Generalized Predictive Control , System Simulation,Diophantine Equation, Temperature Process目录摘要 ........................................................................ I ABSTRACT . (II)一、绪论 (1)1.1 先进控制发展概述 (1)1.1.1 先进控制的产生背景 (1)1.1.2 先进控制的种类 (1)1.2 预测控制发展概述 (4)广义预测控制发展概述 (5)二、PID 算法和仿真 (6)2.1 PID 算法 (6)2.1.1 对象辩识和初始参数整定 (8)2.2 PID 控制参数对系统性能影响 ........................................... 9 .比例增益p K 对系统性能的影响 ....................................... 9 积分时间i T 对控制性能的影响 .. (10)2.2.3 微分时间d T 对控制性能的影响 (10)2.3 被控对象离散数学模型的建立 (10)2.4 PID 控制仿真 (13)三、广义预测控制基本算法 (19)预测模型 (19)3.2 j 步导前输出 (20)3.3 Diophantine 方程的递推求解 (21)3.4 多步输出预测 (23)最优控制率的计算 (24)系统的IMC 结构 (25)四、PI 型广义预测控制算法 (30)控制算法的推导 (30)4.2 简化控制算法的推导 (33)4.3 仿真研究 (35)4.3.1 主要调节过程及结论 (35)4.3.2 PIGPC 与PID 仿真结果比较 (37)4.3.3 PIGPC 的抗干扰性,随动性,鲁棒性 (37)4.3.4 比例因子P K 和积分因子I K (39)五、总结 (41)参考文献 (42)致谢 (44)附录 (45)一、绪论先进控制发展概述先进控制作为现今工业控制界的主要控制策略,经过了近半个世纪的发展才得以达到今天的发展水平。
广义预测控制算法
广义预测控制算法(Generalized Predictive Control,GPC)是
一种经典的模型预测控制算法,通过构建动态模型进行系统预测,并根据预测结果调整控制策略,以实现对系统的控制。
GPC算法的核心思想是利用系统的输入和输出数据建立系统
的数学模型,然后利用该模型进行系统的预测。
在每个控制周期内,GPC算法通过最小化预测误差的平方和来优化控制策略,从而实现系统的动态调节。
GPC算法的步骤如下:
1. 建立系统的数学模型,一般采用传递函数或状态空间模型。
2. 根据已知的输入和输出数据,利用最小二乘法或其他拟合方法来估计模型参数。
3. 根据建立的模型进行系统的预测,预测未来若干个时刻的系统输出。
4. 根据预测结果和系统的期望输出,计算预测误差,并通过最小化预测误差的平方和来优化控制策略。
5. 根据优化的控制策略,确定系统的控制输入,并应用于系统。
GPC算法具有较好的鲁棒性和自适应性,可以应用于多种控
制问题。
然而,由于需要建立系统的数学模型,并且对模型参数的估计比较困难,使得算法的实际应用存在一定的困难和局限性。
同时,算法的计算复杂度较高,实时性较差。
总的来说,广义预测控制算法是一种经典的模型预测控制算法,
适用于多种控制问题,但在实际应用中需要解决模型建立和参数估计的问题,并考虑算法的计算复杂度。
广义预测控制理论1引言预测控制思想主要是在70年代形成的,进人80年代后,随着模型算法控制(MAC)的问世,相继出现了动态矩阵控制(DMC)、扩展时域预测自适应控制(EPSAC)等结构各异的预测控制算法,这些算法分别基于有限脉冲响应和有限阶跃响应模型,算法简单,容易实现,1984年,Clarke及其合作者在上述算法的基础上,提出了广义预测控制(GPC)思想及基本方法,GPC基于参数模型,引入了不相等的预测水平和控制水平,使系统设计更灵活。
由于广义预测控制具有预测模型、滚动优化和反馈校正三个基本特征,因而具有优良的控制性能和鲁棒性,被认为是具有代表性的预测控制算法之一并被广泛应用于过程工业中。
近年来,广义预测控制吸引了众多学者对其进行研究国际上,各大控制会议和杂志对它也非常关注,近10年来的美国控制会议(ACC)、IEEE决策与控制会议(CDC)和国际自动控制联合会(IFAC)世界大会几乎每年都有关于预侧控制的专题分组及以预侧控制为主题的工作讨论会,1995年在韩国又召开了关于预测控制的国际讨论会,在广义预测控制方面也发表了不少综述文献和著作。
2广义预测控制2.1广义预测控制的基本算法GPC采用如下CARIMA模型来描述系统A(z ' )y(t) = B(z ')u (t -1) C (z (t) / :其中A(z」),B(z'),C(z')分别是阶数位的n a,n b,n c的z J的多项式,A(z‘)和C(z‘)是首一多项式,{u(t)},{y(t)},「(t)}分别表示系统的输入、输出和白噪声序列,‘刊。
广义预测控制使用如下的二次目标函数N2 NMJ =E{ ' [y(t k) 一,(t k)]2亠二;[:u(t k -1)]2} (2.1.2) k 出1 k =1其中,N1,N2分别为最小、最大预测长度,N M为控制长度,满足关系仁N「N2,N M乞N2且当k>N2时看,假定u(t k-T,■为控制加权序列,(2.1.1)■'(t k)是经柔化后的参考值,在GPC 中,不要求对象输出直接跟踪设定值'■, 只要求y(t)沿着参考轨迹到达设定值■。
极小化目标函数J ,并根据滚动优化的原则,得控制律为u(t) =u(t -1) g ( • - f)其中g 为一行向量「为一参考序列向量,f 为由已知输入和输出组成的数 据向量。
GPC 控制方法的具体推导应合理选择 GPC 中的N I ,N 2,N M 以及’,可使GPC 取得较好的控制性能,其它的一些预测控制的方法可以认为是 GPC 的特殊情况, 例如:当N 1 =1,N 2 = N M = N, ■ =0时,相当于 Richalet 提出的IDCOM ,当 弘二也小皿"时相当于性能指标中不加权的 GMV 控制算法。
2.2广义预测控制的预测模型在GPC 中,采用最小方差控制中所用的受控自回归积分滑动平均模型 (CARIMA )来描述受到随机干扰的对象:A(q 」)y(k) =B(q[q 』u(k) C(q ) (k)其中:A(q J ) =1 yq 」B(q 」)二b 。
bq‘ 他4" C(qJ) =c ° qq/G c qncq‘是后移算子;y(k)q 4 = y(k -1) ; =1-q‘为差分算子;(k)是一个独立的随机噪声序列,为研究方便,如若假设 d =1,则模型可简化为:则k j 时刻系统模型为:A(q 4)y(k j) =B(q 4)u(k j -1) C (qj)因为y(k - j)中含有未知信息,因此引入Diophantine 方程获得系统在k j 时刻的输出预测值。
Diopha ntine 方程:(2.1.3)(2.2.1)(2.2.2)(2.2.3)仁A(q 二)E j(q»: q」F j(q」) (2.2.4)其中:E j(q」)二e j,。
• e j,i q‘•乳如丄亠F i(q1^ f j,。
f j,i q‘f j^q"E j和F j由A(q」)和预测长度j唯一确定,由(131.3)、(131.4)可化简得到如下方程:y(k j^BE j.:u(k j -1) F j y(k) E j (^ j),从而得到GPC预测模型为:y M(k j)=G j.:u(k j -1) F j y(k)(2.2.5)其中G j 二BE j 二(j j) =g j,0 g j,1q J - g j,nb^q4nbA也(2.2.6)因此,对于未来k - j时刻的输出估计只使用k时刻之前的输出以及我们根据最优性能指标确定的输入来确定即可。
式(2.2.2)可简化为:A(q°)y(k) =B(q 冷丸(k-1) C(q J (k)(2.2.7)其中A(q4)=A(q[(1-q')=1 Nq_n a = n a 1, =1,a n^ -a n a,a^ a^a i4,^ i 乞n a,则k 时刻对k - j 时刻的误差可记为:~(k+j|k)=y(k+j)-y(k+jk),j 釘(2.2.8)使预测误差的方差:J-E{~(k+jk)}(2.2.9)最小的j步最优预测y*(k jk)由下列差分方程给出:C(q[y*(k jk)二F j(q')y(k) G j(q「:u(k j T)(2.2.10)此时最优预测误差表示为:~ (k • j k) -E j(q ) (k • j)(2.2.1 1假设C(q」)=1此时式(2210)可简化为:j Jy*(k j k) = %(k j) (' g i q」):u(k j -1), N^ j < N2 (2.2.12)i =0j/其中,%(k j) = F j (q 」)y(k) [G j (q 」)-(、gq 」)u(k j-1)]j」式(2.2.12)中的y/k - j )由过去的控制输入和输出决定,而 (g i q-L \ =u(k j -1)i =0由现在和未来的控制输入决定。
式(2.2.12)用向量和矩阵的形式表示是:y = y 1 G = u(2.2.13)其中,y * 二[y *(k N 1 k),y *(k N 1 1k), y *(k N 2k)]Ty 二[%(k N 1), Y 1(k N 1 1),%(k N 2)]T•心二[ :u(k), . :u(k 1), . :u(k N u -1)]TpN^g N严…g 。
0…0 IgN tg N^Jg 0G =I :: • --gq卫叫」9叫4g N^Nu _(N 2亠制趣u其中N 1,N 2分别称为最小和最大预测步长,N u 为控制步程(N u ::: N 2),G 中参数 均为被控对象开环阶跃响应系数。
根据最优预报可知: y(k j)二 y *(k jk) E(q 」)(k j) (2.2.14) E{y(k j)} =y *(k jk)(2.2.15)在GPC 中,为了将输出值y(k)按一定响应速度平滑地过渡到由参数轨迹确定的 期望值w ,参考轨迹通常可取为如下的一阶滞后(一阶平滑)模型:y r (k)二 y(k) (2.2.16) Y r (k j) -y(k j _1)(1 )w j =1,2,…,N 2其中[0,1]为输出柔化系数(2.2.17)2.3滚动优化GPC采用的是对输出误差和控制增量加权的二次型性能指标:J = E{( - y)T(y「- y) ■ . :u T. :u}(2.3.1)其中,y r 二[y r(k NJ,y r(k N1 1), y r(k N2)]T(2.3.2)y =[y(k N1), y(k N1 1), y(k 2)]丁(2.3.3)■为控制增量加权系数,将式(1.321)对.心求极值,可得最优控制律为:T _1 T=u = (G G 川1) G (y r -y1)(2.3.4)则当前的控制作用为:u(k) =u(k-1) [1,0/ ,0](G T G J)」G T(y r-y1) (2.3.5) 2.4在线辨识与反馈校正GPC控制算法只使用一个控制模型,通过在线反馈校正来保证其准确的预测。
将对象(227)改写为:y(k) =-A(q')y(k) B(qJ・:u(k -1) (k) (241) 其中,A(q」)二A(q」)-1 则有,y(k)二T(kp (k)(2.4.2)其中,(k) =[-y(k-1) -y(k -n a)」u(k-1) • :u(k - 门厂1)]丁V - [a a n_ b o b n b]T可用带遗忘因子的递推最小二乘法(RLS)来估计模型参数二值:^k)二?(k -1) K(k)[y(k) - :(k)彳(k -1)](2.4.3)K(k) =P(k -1) :(k)L: (k)P(k) :(k)」]' (2.4.4) 1P(k) [I —K(k)「(k)]P(k —1) (2.4.5) 其中,0 :::「1是遗忘因子,一般可取0.95」叮;K(k)是权因子,P(k)为正定协方差阵。
控制启动时需要设置参数向量和协方差阵P的初值,通常设定方法为:”P(0)=G2|, a为充分大的实数」(2.4.6) 邂0)=名,5为充分小的实向量总结GPC算法计算机实现步骤如下:1) 根据被控对象及其控制要求给出n a,门匕小仆也‘肌,■和〉;2) 设置初值P(0)和彳(0),输入初始数据;3) 读取y(k),用带遗忘因子的RLS递推估计;4) 用辨识得到的参数代替式(227)中的A和B,递推求解Diophantine方程得到F j和G j ;5) 构造向量和矩阵G,并计算(G T G"I)‘ ;6) 计算(G T G」I)°G T的第一行;7) 按式(2.3.5)计算并施加控制u(k);8) 返回3)继续循环。