F28335增强型正交编码模块EQEP
- 格式:ppt
- 大小:2.21 MB
- 文档页数:32
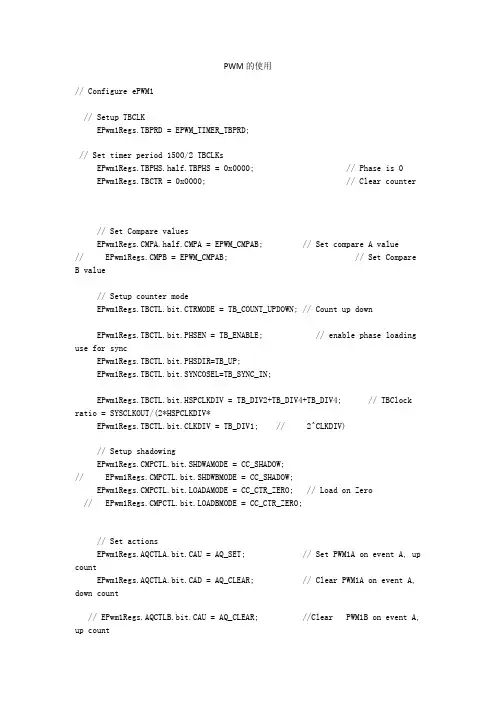
PWM的使用// Configure ePWM1// Setup TBCLKEPwm1Regs.TBPRD = EPWM_TIMER_TBPRD;// Set timer period 1500/2 TBCLKsEPwm1Regs.TBPHS.half.TBPHS = 0x0000; // Phase is 0EPwm1Regs.TBCTR = 0x0000; // Clear counter// Set Compare valuesEPwm1Regs.CMPA.half.CMPA = EPWM_CMPAB; // Set compare A value// EPwm1Regs.CMPB = EPWM_CMPAB; // Set Compare B value// Setup counter modeEPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UPDOWN; // Count up downEPwm1Regs.TBCTL.bit.PHSEN = TB_ENABLE; // enable phase loading use for syncEPwm1Regs.TBCTL.bit.PHSDIR=TB_UP;EPwm1Regs.TBCTL.bit.SYNCOSEL=TB_SYNC_IN;EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV2+TB_DIV4+TB_DIV4; // TBClock ratio = SYSCLKOUT/(2*HSPCLKDIV*EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV1; // 2^CLKDIV)// Setup shadowingEPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;// EPwm1Regs.CMPCTL.bit.SHDWBMODE = CC_SHADOW;EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO; // Load on Zero// EPwm1Regs.CMPCTL.bit.LOADBMODE = CC_CTR_ZERO;// Set actionsEPwm1Regs.AQCTLA.bit.CAU = AQ_SET; // Set PWM1A on event A, up countEPwm1Regs.AQCTLA.bit.CAD = AQ_CLEAR; // Clear PWM1A on event A, down count// EPwm1Regs.AQCTLB.bit.CAU = AQ_CLEAR; //Clear PWM1B on event A, up count// EPwm1Regs.AQCTLB.bit.CAD = AQ_SET; // Set PWM1B on event A, down count// Set DeadBandEPwm1Regs.DBCTL.bit.IN_MODE=DBA_ALL;EPwm1Regs.DBCTL.bit.POLSEL=DB_ACTV_HIC;EPwm1Regs.DBCTL.bit.OUT_MODE=DB_FULL_ENABLE;EPwm1Regs.DBRED=Dbred; // Dead-band rising edge delayEPwm1Regs.DBFED=Dbfed; // Dead-band falling edge delay// Set Trip ZoneEPwm1Regs.TZSEL.bit.OSHT1=TZ_ENABLE;EPwm1Regs.TZCTL.bit.TZA=TZ_FORCE_LO;EPwm1Regs.TZCTL.bit.TZB=TZ_FORCE_LO;// Interrupt where we will change the Compare ValuesEPwm1Regs.ETSEL.bit.SOCBSEL= ET_CTR_ZERO;// Select start ADC (EPWMxSOCB) on Zero eventEPwm1Regs.ETSEL.bit.SOCBEN= Enable; // EnableEPwm1Regs.ETPS.bit.SOCBPRD=ET_1ST;主要注意的就是EPWM的死区子模块。
T M S320F28335中文资料TMS320F28335中文资料TMS320F28335采用176引脚LQFP四边形封装,其功能结构参见参考文献。
其主要性能如下:高性能的静态CMOS技术,指令周期为6.67 ns,主频达150 MHz;高性能的32位CPU,单精度浮点运算单元(FPU),采用哈佛流水线结构,能够快速执行中断响应,并具有统一的内存管理模式,可用C/C++语言实现复杂的数学算法;6通道的DMA控制器;片上256 Kxl6的Flash存储器,34 Kxl6的SARAM存储器.1 Kx16 OTPROM和8 Kxl6的Boot ROM。
其中Flash,OTPROM,16 Kxl6的SARAM均受密码保护;控制时钟系统具有片上振荡器,看门狗模块,支持动态PLL调节,内部可编程锁相环,通过软件设置相应寄存器的值改变CPU的输入时钟频率;8个外部中断,相对TMS320F281X系列的DSP,无专门的中断引脚。
GPI00~GPI063连接到该中断。
GPI00一GPI031连接到XINTl,XINT2及XNMI外部中断,GPl032~GPI063连接到XINT3一XINT7外部中断;支持58个外设中断的外设中断扩展控制器(PIE),管理片上外设和外部引脚引起的中断请求;增强型的外设模块:18个PWM输出,包含6个高分辨率脉宽调制模块(HRPWM)、6个事件捕获输入,2通道的正交调制模块(QEP);3个32位的定时器,定时器0和定时器1用作一般的定时器,定时器0接到PIE模块,定时器1接到中断INTl3;定时器2用于DSP/BIOS的片上实时系统,连接到中断INTl4,如果系统不使用DSP/BIOS,定时器2可用于一般定时器;串行外设为2通道CAN模块、3通道SCI模块、2个McBSP(多通道缓冲串行接口)模块、1个SPI模块、1个I2C主从兼容的串行总线接口模块;12位的A/D转换器具有16个转换通道、2个采样保持器、内外部参考电压,转换速度为80 ns,同时支持多通道转换;88个可编程的复用GPIO引脚;低功耗模式;1.9 V内核,3.3 V I/O供电;符合IEEEll49.1标准的片内扫描仿真接口(JTAG);TMS320F28335的存储器映射需注意以下几点:片上外设寄存器块0~3只能用于数据存储区,用户不能在该存储区内写入程序。


DSP原理与应用The Technology & Applications of DSP北京交通大学电气工程学院郝瑞祥haorx@本页已使用福昕阅读器进行编辑。
福昕软件(C)2005-2009,版权所有,仅供试用。
§7.1F28335的PWM控制●每个ePWM模块都支持下列特性:●精确的16位时间定时器,可以进行周期和频率控制。
●两个PWM输出(EPWMxA and EPWMxB) 可以用于下面的控制●–两个独立的PWM输出进行单边控制●–两个独立的PWM输出进行双边对称控制●–一个独立的PWM输出进行双边非对称控制●与其它ePWM模块有关的可编程超前和滞后相控。
●在一个循环基础上的硬件锁定(同步)相位关系。
●独立的上升沿和下降沿死区延时控制●可编程控制故障区(trip zone)用于故障时的周期循环控制(trip)和单次(one-shot)控制.●一个控制条件可以使PWM输出强制为高,低,或高阻逻辑电平.●所有事件都可以触发CPU中断,启动ADC开始转换。
●可编程事件有效降低了在中断时CPU的负担。
●PWM高频载波信号对于脉冲变压器门极驱动非常有用。
本页已使用福昕阅读器进行编辑。
福昕软件(C)2005-2009,版权所有,仅供试用。
多个ePWM模块结构框图ePWM模块的子模块和信号连接模块相关信号说明如下:●PWM 输出信号(EPWMxA and EPWMxB) (x=1…6)●通过IO引脚输出PWM信号.●Trip-zone 信号(TZ1 to TZ6).这些输入信号警告ePWM模块有外部故障发生。
设备的每个模块都可以配置成使用或者忽略任何故障区信号(Trip-zone)。
这些信号可以设置为通用IO外设的异步输入。
●基于时间的同步输入信号(EPWMxSYNCI)和输出(EPWMxSYNCO)信号.同步信号雏菊花形将ePWM模块连接在一起。
每个模块可以配置成使用或忽略其同步输入信号。
F28335 EPWM各模块简介以DSP为基础的数字信号控制器(DSC)执行电动马达相位控制时,其核心组件为事件管理器(Event Manager)。
由于以DSP为基础的控制器应用范围正逐渐扩大到高效能电子产品的触发与控制等各种相关领域,因此这类事件管理器也需要一套全新架构。
以德州仪器(TI)基于DSP的24x和F28x数字信号控制器来看,事件管理器是由DSP 的可程式逻辑电路构成,以便产生脉冲宽度调变(PWM)信号。
这些事件管理器虽然是为了三相系统所设计,却拥有极大弹性,可以高效率应用在多相位或其它特殊需求应用(或许再加上一些软件)。
事件管理器的功能已通过数个世代的处理器考验与测试,只需要进行一些细部调整即可。
针对新的应用需求,TI开发出一套称为加强型事件管理器(eEVM)的架构,将应用于F28x衍生系列的新元件,包括TMS320F2801、TMS320F2806和TMS320F2808控制器(TMS320F2801已实作部份功能)。
加强型事件管理器的PWM产生方式与过去有很大差异。
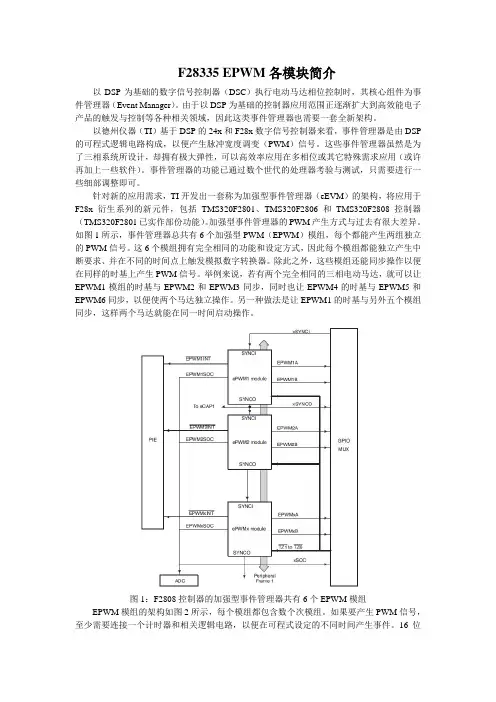
如图1所示,事件管理器总共有6个加强型PWM(EPWM)模组,每个都能产生两组独立的PWM信号。
这6个模组拥有完全相同的功能和设定方式,因此每个模组都能独立产生中断要求、并在不同的时间点上触发模拟数字转换器。
除此之外,这些模组还能同步操作以便在同样的时基上产生PWM信号。
举例来说,若有两个完全相同的三相电动马达,就可以让EPWM1模组的时基与EPWM2和EPWM3同步,同时也让EPWM4的时基与EPWM5和EPWM6同步,以便使两个马达独立操作。
另一种做法是让EPWM1的时基与另外五个模组同步,这样两个马达就能在同一时间启动操作。
图1:F2808控制器的加强型事件管理器共有6个EPWM模组EPWM模组的架构如图2所示,每个模组都包含数个次模组。
如果要产生PWM信号,至少需要连接一个计时器和相关逻辑电路,以便在可程式设定的不同时间产生事件。
应用eQEP及编码器测量电机位置与速度的方法张涛;杨振强;王晓旭【摘要】现代电气传动伺服系统中,对电动机转子位置及转速的检测必不可少,并在一定程度上决定着整个系统的性能.介绍了一种使用DSP28335的增强型正交编码脉冲单元(eQEP)与增量式编码器测量电机转速的方法.提出了一种改进的变权值平均速度算法,对其进行了对比误差分析,并通过仿真与实验证明了该算法的可行性.应用该方法,可以方便地设计出电机测速方案,在保证测速范围的前提下合理选择元件参数和算法参数,可精确测得电机转速.%In modern electrical transmission servo system,the test of the rotor position and speed is indispensable,and determines the system performance to a certain extent. Introduced a method to measure motor's rotate speed with enhanced quadrature encoder pulse (eQEP) module in DSP28335 and photoelectric encoder and put forward an improved method of calculating speed. Error analysis, simulation and experiment prove the feasibility of the proposed algorithm. With the method in this paper, we can design a motor speed solution easily. Ensure speed range and choose the proper parameters of components and program, we can get the motor speed accurately.【期刊名称】《电气传动》【年(卷),期】2011(000)004【总页数】4页(P48-51)【关键词】增强型正交编码脉冲单元;编码器;变权值平均【作者】张涛;杨振强;王晓旭【作者单位】大连理工大学电力电子研究所,辽宁,大连,116023;大连理工大学电力电子研究所,辽宁,大连,116023;大连理工大学电力电子研究所,辽宁,大连,116023【正文语种】中文【中图分类】TM306现代电动伺服系统发展突飞猛进,尤其是在机械制造行业中发挥着不可替代的作用,各种机床运动部分的速度控制、运动轨迹控制、位置控制等,大量采用了电动伺服系统。
作为一个电子硬件工程师,怎么不能懂DSP,或者我们中有一些同学对DSP的理解还不是很多,今天就让我们给大家介绍一个DSP的入门芯片,来自TI的TMS320F28335。
相信看过了这一系列的内容,大家会对DSP有初步的了解。
TMS320F28335简介:TMS320F28335采用176引脚LQFP四边形封装,其功能结构参见参考文献。
其主要性能如下:高性能的静态CMOS技术,指令周期为6.67 ns,主频达150 MHz;高性能的32位CPU,单精度浮点运算单元(FPU),采用哈佛流水线结构,能够快速执行中断响应,并具有统一的内存管理模式,可用C/C++语言实现复杂的数学算法;6通道的DMA控制器;片上256 Kxl6的Flash存储器,34 Kxl6的SARAM存储器.1 Kx16 OTPROM和8 Kxl6的Boot ROM。
其中Flash,OTPROM,16 Kxl6的SARAM均受密码保护;控制时钟系统具有片上振荡器,看门狗模块,支持动态PLL调节,内部可编程锁相环,通过软件设置相应寄存器的值改变CPU的输入时钟频率;8个外部中断,相对TMS320F281X系列的DSP,无专门的中断引脚。
GPI00~GPI063连接到该中断。
GPI00一GPI031连接到XINTl,XINT2及XNMI外部中断,GPl032~GPI063连接到XINT3一XINT7外部中断;支持58个外设中断的外设中断扩展控制器(PIE),管理片上外设和外部引脚引起的中断请求;增强型的外设模块:18个PWM输出,包含6个高分辨率脉宽调制模块(HRPWM)、6个事件捕获输入,2通道的正交调制模块(QEP);3个32位的定时器,定时器0和定时器1用作一般的定时器,定时器0接到PIE模块,定时器1接到中断INTl3;定时器2用于DSP/BIOS的片上实时系统,连接到中断INTl4,如果系统不使用DSP/BIOS,定时器2可用于一般定时器;串行外设为2通道CAN模块、3通道SCI模块、2个McBSP(多通道缓冲串行接口)模块、1个SPI模块、1个I2C主从兼容的串行总线接口模块;12位的A/D转换器具有16个转换通道、2个采样保持器、内外部参考电压,转换速度为80 ns,同时支持多通道转换;88个可编程的复用GPIO引脚;低功耗模式;1.9 V内核,3.3 V I/O供电;符合IEEEll49.1标准的片内扫描仿真接口(JTAG);TMS320F28335的存储器映射需注意以下几点:片上外设寄存器块0~3只能用于数据存储区,用户不能在该存储区内写入程序。
基于DSP28335的多相电机控制器作者:宋臻李金金朱建光来源:《电脑知识与技术》2018年第14期摘要:多相永磁同步电机相比于传统电机有更优秀的性能,其冗余的特点使其在缺相或断相后仍能保持运行。
该文以TMS320F28335为核心,设计了多相永磁同步电机控制器,给出了DSP最小系统和外围电路的设计方法,并针对控制器设计了50W的供电电源。
关键词:电机控制;DSP28335;开关电源中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2018)14-0251-02Abstract:Compared with traditional motors, multi-phase permanent magnet synchronous motors have better performance, and their redundant characteristics keep them running after phase loss or phase failure. In this paper, TMS320F28335 as the core, designed a multiphase permanent magnet synchronous motor controller, given the DSP minimum system and peripheral circuit design methods, and designed for the controller 50W power supply.Key words: motor control; DSP28335; switching power supply近年来,伴随着工业领域对于调速系统可靠性的要求越来越高,同时伴随着材料技术和电力电子技术的快速发展,使得高性能的多相变频调速系统的实现成为可能,其优势和应用范围都有了进一步的提高和扩大,尤其是在军事应用领域和重要工业领域,高性能多相电机调速系统的稳定性和可靠性是系统运行的重要保证。
F28335EPWM各模块简介F28335 EPWM各模块简介以DSP为基础的数字信号控制器(DSC)执行电动马达相位控制时,其核心组件为事件管理器(Event Manager)。
由于以DSP为基础的控制器应用范围正逐渐扩大到高效能电子产品的触发与控制等各种相关领域,因此这类事件管理器也需要一套全新架构。
以德州仪器(TI)基于DSP的24x和F28x数字信号控制器来看,事件管理器是由DSP 的可程式逻辑电路构成,以便产生脉冲宽度调变(PWM)信号。
这些事件管理器虽然是为了三相系统所设计,却拥有极大弹性,可以高效率应用在多相位或其它特殊需求应用(或许再加上一些软件)。
事件管理器的功能已通过数个世代的处理器考验与测试,只需要进行一些细部调整即可。
针对新的应用需求,TI开发出一套称为加强型事件管理器(eEVM)的架构,将应用于F28x衍生系列的新元件,包括TMS320F2801、TMS320F2806和TMS320F2808控制器(TMS320F2801已实作部份功能)。
加强型事件管理器的PWM产生方式与过去有很大差异。
如图1所示,事件管理器总共有6个加强型PWM(EPWM)模组,每个都能产生两组独立的PWM信号。
这6个模组拥有完全相同的功能和设定方式,因此每个模组都能独立产生中断要求、并在不同的时间点上触发模拟数字转换器。
除此之外,这些模组还能同步操作以便在同样的时基上产生PWM信号。
举例来说,若有两个完全相同的三相电动马达,就可以让EPWM1模组的时基与EPWM2和EPWM3同步,同时也让EPWM4的时基与EPWM5和EPWM6同步,以便使两个马达独立操作。
另一种做法是让EPWM1的时基与另外五个模组同步,这样两个马达就能在同一时间启动操作。
图1:F2808控制器的加强型事件管理器共有6个EPWM模组EPWM模组的架构如图2所示,每个模组都包含数个次模组。
如果要产生PWM信号,至少需要连接一个计时器和相关逻辑电路,以便在可程式设定的不同时间产生事件。
tms320f28335原理及其在电气工程中的应用TMS320F28335是一款基于32位定点数字信号处理器(DSP)的芯片,由德州仪器公司(Texas Instruments)生产。
它具有高速、高效、低功耗等优点,广泛应用于各种电气工程领域。
TMS320F28335基于C28x内核架构,拥有高达150MHz的最高工作频率,可以实现复杂的数字信号处理和控制算法,如矢量控制、PID调节、滤波、FFT等。
此外,它还拥有多种外设接口,如GPIO、CAN、SPI、I2C等,可以实现各种外部设备的连接和数据通信。
在电气工程领域中,TMS320F28335主要应用于电力电子、电机控制、光伏发电、电网无功补偿、智能电网等方面。
具体应用包括:
1. 电机控制:TMS320F28335内置了多种PWM输出模块和编码器接口,可以实现高性能的电机控制,如直接矢量控制、间接矢量控制等。
2. 电力电子:TMS320F28335可以实现各种电力电子开关器件的PWM控制,如IGBT、MOSFET、整流器等,实现电力变换、能量转换和电子调节等功能。
3. 光伏发电:TMS320F28335可以与光伏逆变器的控制器相结合,通过MPPT 算法实现对光伏电池板的最大功率追踪,提高光伏发电效率。
4. 智能电网:TMS320F28335可以与智能电网控制器相结合,实现对电网的无功补偿、电网状态监测、分布式发电控制等功能。
总之,TMS320F28335作为一款高性能的DSP芯片,具有广泛的应用前景,在电气工程领域中将有着越来越广泛的应用。
基于TMS320F28335的无刷直流电机调速系统设计余安富;于平;李先锋;赵昶宇【摘要】In order to improve the control effect of the brushless direct current motor,a speed control system for DC motor was designed based on MCU TMS320F28335. This system adopted the speed and current double-loop control strategy. The hardware system was mainly consisted of a 16 bits ADS8556 converter and a 2SD106AI - 17 driver, and the software design was based on it. Practice results show that this speed control system's stable operation is very well,the control algorithm is rational,and the load capacity is very strong.%为了提高无刷直流电机的控制效果,设计了以TMS320F28335为主控制器的无刷直流电机调速控制系统.该系统采用转速电流双闭环控制策略,以16位A/D转换器ADS8556和2SD106AI - 17驱动器为核心外围器件构成硬件系统,并在此基础上完成软件设计.实践证明:该调速系统运行稳定,控制算法合理,带负载能力强.【期刊名称】《仪表技术与传感器》【年(卷),期】2011(000)009【总页数】4页(P102-104,107)【关键词】TMS320F28335;无刷直流电机;调速系统【作者】余安富;于平;李先锋;赵昶宇【作者单位】中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院研究生院,北京100039;中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033;中国科学院长春光学精密机械与物理研究所,吉林长春130033【正文语种】中文【中图分类】TP2730 引言无刷直流电机既具有交流电机结构简单、稳定性高的特点,又具有直流电机的调速范围宽、功率密度高、出力矩大等优点,在各行各业均得到广泛的应用。
TMS320F28335中文资料TMS320F28335采用176引脚LQFP四边形封装,其功能结构参见参考文献。
其主要性能如下:高性能的静态CMOS技术,指令周期为6.67 ns,主频达150 MHz;高性能的32位CPU,单精度浮点运算单元(FPU),采用哈佛流水线结构,能够快速执行中断响应,并具有统一的内存管理模式,可用C/C++语言实现复杂的数学算法;6通道的DMA控制器;片上256 Kxl6的Flash存储器,34 Kxl6的SARAM存储器.1 Kx16 OTPROM 和8 Kxl6的Boot ROM。
其中Flash,OTPROM,16 Kxl6的SARAM均受密码保护;控制时钟系统具有片上振荡器,看门狗模块,支持动态PLL调节,内部可编程锁相环,通过软件设置相应寄存器的值改变CPU的输入时钟频率;8个外部中断,相对TMS320F281X系列的DSP,无专门的中断引脚。
GPI00~GPI063连接到该中断.GPI00一GPI031连接到XINTl,XINT2及XNMI外部中断,GPl032~GPI063连接到XINT3一XINT7外部中断;支持58个外设中断的外设中断扩展控制器(PIE),管理片上外设和外部引脚引起的中断请求;增强型的外设模块:18个PWM输出,包含6个高分辨率脉宽调制模块(HRPWM)、6个事件捕获输入,2通道的正交调制模块(QEP);3个32位的定时器,定时器0和定时器1用作一般的定时器,定时器0接到PIE模块,定时器1接到中断INTl3;定时器2用于DSP/BIOS的片上实时系统,连接到中断INTl4,如果系统不使用DSP/BIOS,定时器2可用于一般定时器;串行外设为2通道CAN模块、3通道SCI模块、2个McBSP(多通道缓冲串行接口)模块、1个SPI模块、1个I2C主从兼容的串行总线接口模块;12位的A/D转换器具有16个转换通道、2个采样保持器、内外部参考电压,转换速度为80 ns,同时支持多通道转换;88个可编程的复用GPIO引脚;低功耗模式;1.9 V内核,3.3 V I/O供电;符合IEEEll49.1标准的片内扫描仿真接口(JTAG);TMS320F28335的存储器映射需注意以下几点:片上外设寄存器块0~3只能用于数据存储区,用户不能在该存储区内写入程序.OTP ROM区(0×38 0000~0×38 03FF)为只读空间,存储A/D转换器的校准程序,用户不能对此空间写入程序。