闭环直流电机控制系统结构设计
- 格式:docx
- 大小:192.18 KB
- 文档页数:13
双闭环直流电机调速系统设计嘿,大家好!今天咱们聊聊一个挺酷的话题:双闭环直流电机调速系统。
虽然听起来有点像外星人的科技,但是其实它就是咱们日常生活中的一些电机背后的“聪明脑袋”。
没错,电动工具、电动汽车,甚至是你家那台洗衣机,都可能用到这种技术。
别担心,我会用简单易懂的语言,把这个“高大上”的话题聊得通俗易懂,让你像喝水一样轻松明白。
1. 什么是双闭环系统?首先,咱们得搞清楚什么是双闭环系统。
你可以把它想象成一辆高科技的赛车。
车上有两个智能系统,一个负责控制车速,另一个负责检查车速是不是正好。
第一个环节,叫做“速度闭环”,就像是车里的加速器,它根据你给的油门信号来调整速度。
第二个环节,叫做“电流闭环”,就是车上的仪表盘,它会实时监控实际速度和预定速度的差异,确保车速始终如你所愿。
两个环节相互配合,就像是赛车手的左右手,协作得天衣无缝。
1.1 速度闭环的作用速度闭环系统,简单来说,就是确保电机转得刚刚好。
你可以把它想成是你的车速表,告诉你车速到底快不快。
当你设定了目标速度后,速度闭环就会一直“盯着”电机的实际速度,看是不是达到了你想要的。
要是电机转得快了或者慢了,速度闭环会发出“警报”,让电机调整到正确的速度。
就像你开车的时候,如果超速了,车上的警报器就会提醒你:“嘿,慢点!”1.2 电流闭环的作用而电流闭环呢,就是确保电机在运行时不会超负荷。
你可以把它想象成你的车载电脑,时刻监控电机的“健康状态”。
如果电机的电流过大,就像是车上的发动机超负荷一样,电流闭环会自动调整电流,防止电机“过劳”工作,保障电机的长寿命和稳定性。
这就像车上的“健康检查”,时刻关注电机的“身体状况”,让它保持在最佳状态。
2. 如何设计双闭环系统?说到设计双闭环系统,那可不是简单的“煮熟的鸭子嘴里跑”,而是要细心雕琢的“工艺品”。
设计时,你需要考虑到很多细节,就像调配一杯完美的鸡尾酒一样,必须把每个成分都搭配得恰到好处。
2.1 控制器的选择首先,你得挑选一个靠谱的控制器。
直流电机PWM闭环调速系统摘要:推出一种使用单片机的PWM直流电机闭环调速系统。
本系统结构简单,价格低廉,在实际应用中效果良好。
采用硬件电路实现直流电机闭环调速系统已在实践中应用多年,其硬件组成复杂,调整困难,缺乏控制的灵活性。
本文介绍的直流电机PWM闭环调速系统,使用低价位的单片微机89C2051为核心,实现闭环控制,并可进行数字显示和速度预置,方便了使用。
电机调速采用脉宽调制方式,与晶闸管调速相比技术先进,可减少对电源的污染。
本系统已用于健身跑步机调速,工作可靠,使用效果良好。
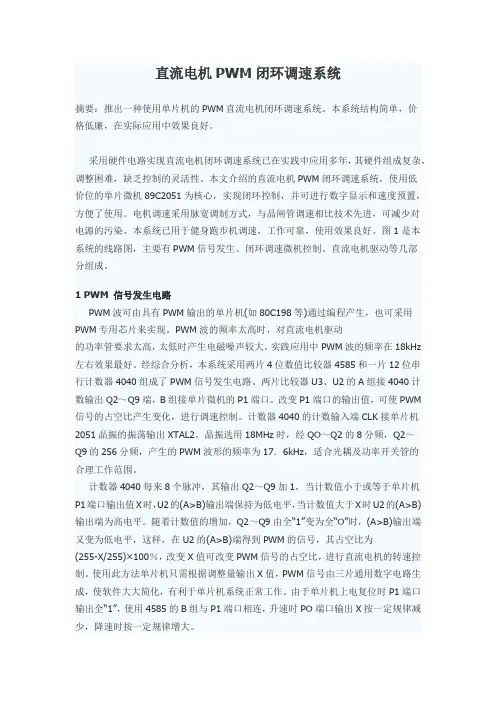
图1是本系统的线路图,主要有PWM信号发生、闭环调速微机控制、直流电机驱动等几部分组成。
1 PWM 信号发生电路PWM波可由具有PWM输出的单片机(如80C198等)通过编程产生,也可采用PWM专用芯片来实现。
PWM波的频率太高时,对直流电机驱动的功率管要求太高,太低时产生电磁噪声较大。
实践应用中PWM波的频率在18kHz 左右效果最好。
经综合分析,本系统采用两片4位数值比较器4585和一片12位串行计数器4040组成了PWM信号发生电路。
两片比较器U3、U2的A组接4040计数输出Q2~Q9端,B组接单片微机的P1端口。
改变P1端口的输出值,可使PWM 信号的占空比产生变化,进行调速控制。
计数器4040的计数输入端CLK接单片机2051晶振的振荡输出XTAL2。
晶振选用18MHz时,经QO~Q2的8分频,Q2~Q9的256分频,产生的PWM波形的频率为17.6kHz,适合光耦及功率开关管的合理工作范围。
计数器4040每来8个脉冲,其输出Q2~Q9加1,当计数值小于或等于单片机P1端口输出值X时,U2的(A>B)输出端保持为低电平,当计数值大于X时U2的(A>B)输出端为高电平。
随着计数值的增加,Q2~Q9由全“1”变为全“O”时,(A>B)输出端又变为低电平,这样,在U2的(A>B)端得到PWM的信号,其占空比为(255-X/255)×100%,改变X值可改变PWM信号的占空比,进行直流电机的转速控制。
实验报告直流电机闭环调速控制系统设计和实现班级:姓名:学号:时间:指导老师:2012年6月一、实验目的1.了解闭环调速控制系统的构成。
2.熟悉PID 控制规律,并且用算法实现。
二、实验设备PC 机一台,TD-ACC+实验系统一套,i386EX 系统板一块三、实验原理根据上述系统方框图,硬件线路图可设计如下,图中画“○”的线需用户自行接好。
上图中,控制机算机的“DOUT0”表示386EX 的I/O 管脚P1.4,输出PWM 脉冲经驱动后控制直流电机,“IRQ7”表示386EX 内部主片8259 的7 号中断,用作测速中断。
实验中,用系统的数字量输出端口“DOUT0”来模拟产生 PMW 脉宽调制信号,构成系统的控制量,经驱动电路驱动后控制电机运转。
霍尔测速元件输出的脉冲信号记录电机转速构成反馈量。
在参数给定情况下,经PID 运算,电机可在控制量作用下,按给定转速闭环运转。
系统定时器定时1ms,作为系统采样基准时钟;测速中断用于测量电机转速。
直流电机闭环调速控制系统实验的参考程序流程图如下:四、实验步骤1.参照图 6.1-3 的流程图,编写实验程序,编译、链接。
2.按图6.1-2 接线,检查无误后开启设备电源,将编译链接好的程序装载到控制机中。
3.打开专用图形界面,运行程序,观察电机转速,分析其响应特性。
4.若不满意,改变参数:积分分离值Iband、比例系数KPP、积分系数KII、微分系数 KDD 的值后再观察其响应特性,选择一组较好的控制参数并记录下来。
5.注意:在程序调试过程中,有可能随时停止程序运行,此时DOUT0 的状态应保持上次的状态。
当DOUT0 为1 时,直流电机将停止转动;当DOUT0 为0 时,直流电机将全速转动,如果长时间让直流电机全速转动,可能会导致电机单元出现故障,所以在停止程序运行时,最好将连接DOUT0的排线拔掉或按系统复位键.五、心得体会此次实验是直流电机闭环调速控制系统的设计和实现,通过这次实验,让我了解了闭环调速控制系统的基本构成。
转速电流双闭环直流调速系统设计一、引言直流调速系统是控制直流电机转速的一种常用方法。
在实际应用中,为了提高系统性能,通常采用双闭环控制结构,即转速环和电流环。
转速环用于控制电机转速,电流环用于控制电机电流。
本文将对转速、电流双闭环直流调速系统进行详细设计。
二、转速环设计转速环的主要功能是通过控制电机的转矩来实现对转速的精确控制。
转速环设计步骤如下:1.系统建模:根据电机的特性曲线和转矩方程,建立电机数学模型。
通常采用转速-电压模型,即Tm=Kt*Ua-Kv*w。
2.设计转速环控制器:选择适当的控制器类型和参数,比如PID控制器。
根据电机数学模型,可以使用根轨迹法、频域法等进行控制器参数设计。
确定控制器增益Kp、Ki和Kd。
3.闭环仿真:使用仿真软件,进行闭环仿真,验证控制器的性能。
4.实际系统调试:将设计好的转速环控制器实施到实际系统中,进行调试和优化。
根据实际情况对控制器参数进行微调。
三、电流环设计电流环的主要功能是控制电机的电流,以确保电机输出的转矩能够满足转速环的要求。
电流环设计步骤如下:1.系统建模:根据电机的特性曲线和电流方程,建立电机数学模型。
通常采用电流-电压模型,即Ia=(Ua-R*Ia-Ke*w)/L。
2.设计电流环控制器:选择适当的控制器类型和参数,比如PID控制器。
根据电机数学模型,可以使用根轨迹法、频域法等进行控制器参数设计。
确定控制器增益Kp、Ki和Kd。
3.闭环仿真:使用仿真软件,进行闭环仿真,验证控制器的性能。
4.实际系统调试:将设计好的电流环控制器实施到实际系统中,进行调试和优化。
根据实际情况对控制器参数进行微调。
四、双闭环控制系统设计在转速环和电流环都设计好的基础上,将两个闭环控制器连接起来,形成双闭环控制系统。
具体步骤如下:1.控制系统结构设计:将电流环置于转速环的前端,形成串级控制结构。
2.系统建模:将转速环和电流环的数学模型进行串联,建立双闭环控制系统的数学模型。
直流电动机转速闭环控制系统图解
为了提高系统的掌握精度,必需把系统输出量的信息反馈到输入端,通过比较输入值与输出值来产生偏差信号,该偏差信号以肯定的掌握规律产生相应的掌握作用,使偏差信号渐渐减小直至消退,从而使掌握系统达到预期的要求。
所谓闭环掌握系统是指输出量直接或间接地反馈到输入端,形成闭环参加掌握的系统。
换句话说,就是将输出量反馈回来和输入量比较,使输出值稳定在期望的范围内。
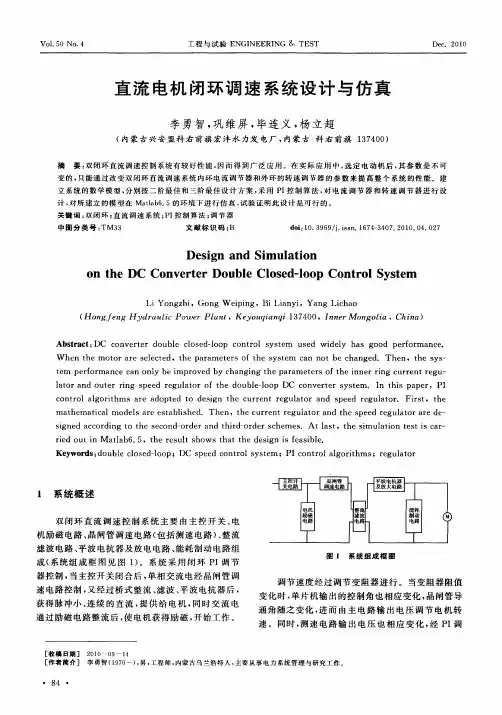
图1为直流电动机转速闭环掌握系统方框图。
图中,把从系统输入量到输出量之间的通道称为前向通道或正向通道;从输出量到反馈信号之间的通道称为反馈通道。
由于采纳了反馈信号,信号的传输路径形成闭合回路,使系统输出量(转速)反过来直接影响掌握作用。
这种通过反馈回路使系统构成闭环,并按偏差产生掌握作用,以减小或消退偏差的掌握系统,称为闭环掌握系统或反馈掌握系统。
图1直流电动机转速闭环掌握系统
闭环掌握系统的主要特点是被控对象的输出(被控量)会反送回来影响掌握器的输入,形成一个或多个闭环回路。
闭环掌握系统有正反馈和负反馈,若反馈信号与系统商定值信号相反,则称为负反馈;若极性相同,则称为正反馈。
一般的闭环掌握系统都采纳负反馈,又称为负反馈掌握系统。
闭环掌握系统的优点是具有自动修正被控量消失偏离的力量,可以修正元件参数变化以及外界扰动引起的误差。
晶闸管双闭环直流调速系统设计引言:直流调速系统广泛应用于电机控制领域,其中晶闸管双闭环直流调速系统具有较好的性能和可靠性。
本文将介绍晶闸管双闭环直流调速系统的设计原理和步骤,并分析其性能和可行性。
一、系统设计原理:晶闸管双闭环直流调速系统由速度环和电流环组成。
其中速度环通过测量电机转速与期望速度之间的误差并反馈控制,通过调整电机的输入电压来改变电机的转速。
电流环通过测量电机输出电流与期望电流之间的误差并反馈控制,通过调整晶闸管的导通角来改变电机的输出电流。
速度环和电流环通过PID控制器进行控制,实现闭环控制。
二、系统设计步骤:1.确定系统参数:包括电机参数、电压参数、电流参数和速度参数等。
根据实际情况选择合适的参数值。
2.设计速度环:首先选择合适的速度传感器进行速度测量,如光电编码器或霍尔元件。
然后根据测量值与期望速度之间的误差计算PID控制器的输出值,进一步控制电机的输入电压。
3.设计电流环:选择合适的电流传感器进行电流测量,如电流互感器或霍尔元件。
根据测量值与期望电流之间的误差计算PID控制器的输出值,进一步控制晶闸管的导通角。
4.设计反馈回路:将测量到的速度和电流信号经过滤波器进行滤波处理,减小干扰。
然后将滤波后的信号输入到PID控制器,计算控制器的输出值。
最后将控制器的输出值经过扩大器进行放大,最终作为输入信号驱动电机。
5.系统仿真和优化:使用MATLAB等仿真软件进行系统仿真,分析系统的性能和稳定性。
根据仿真结果,调整控制参数和系统结构,优化系统性能。
三、系统性能和可行性分析:晶闸管双闭环直流调速系统具有较好的稳态和动态性能。
速度环能够实现对电机速度的精确控制,适应不同负载的要求。
电流环能够实现对电机输出电流的精确控制,保证电机的安全运行。
经过优化设计的系统具有较快的响应速度、较小的超调量和较好的稳定性。
总结:本文介绍了晶闸管双闭环直流调速系统的设计原理和步骤,并分析了其性能和可行性。
双闭环直流电机调速系统设计在今天的科技世界里,电机就像是家里的“万能小助手”,无处不在。
你想想,电风扇、洗衣机、甚至小汽车,都少不了它们的身影。
而双闭环直流电机调速系统就是这个小助手的“智囊团”,让它在各种环境中游刃有余,真是个神奇的存在。
今天,我们就来聊聊这个系统是怎么工作的,听起来是不是有点高大上?别担心,咱们用通俗易懂的语言来探讨,让你在闲聊中也能装装逼!1. 什么是双闭环控制?1.1 直流电机的基本知识直流电机,这东西其实就是通过直流电来转动的电机,简单说,就是通过电流来产生磁场,让电机的轴子转动起来。
想象一下,你在玩一辆遥控小车,控制它的速度和方向,其实和电机的工作原理类似。
电流大了,小车跑得快;电流小了,小车就慢了。
是不是很简单?不过,要把这个电机调得又快又稳,就得靠我们的双闭环系统了。
1.2 双闭环系统的工作原理双闭环控制,顾名思义,分为两个环,一个是速度环,一个是电流环。
速度环就像是你的眼睛,时刻盯着电机的转速,确保它不会跑偏。
而电流环就像是你的手,及时调整电机所需的电流,让它在需要的时候有充足的动力。
就好比你骑自行车,风一吹,你得用力蹬脚踏,让车子稳稳前行,这就是速度和电流的配合。
两者相辅相成,形成了一个良性的循环,确保电机在各种负载下都能稳定工作。
2. 设计双闭环系统的重要性2.1 提高系统性能你想啊,电机如果没有双闭环控制,开得快的时候,可能转速就飙到天上,没法控制;慢的时候,又感觉力不从心。
这就像你打球,想要扣篮却被卡在了框下,真是让人心急火燎!而有了双闭环系统,电机就能在不同的环境中保持稳定的转速,性能大大提升。
无论是重载还是轻载,电机都能游刃有余,根本不在话下。
2.2 降低能耗再来谈谈能耗的问题。
我们都知道,能源危机可是个大麻烦。
双闭环系统能够通过实时监测和调节,确保电机在最优状态下运行,从而降低能耗。
想象一下,省电就像是在家里随便找零花钱,谁不乐意呢?通过科学合理的控制,电机就能用更少的电,做更多的事,真是一举两得!3. 实际应用案例3.1 工业自动化说到双闭环系统的实际应用,那可真是多得数不过来。
1 设计方案论证1.1电流环调节器方案一,采用PID调节器,PID调节器是最理想的调节器,能够平滑快速调速,但在实际应用过程中存在微分冲击,将对电机产生较大的冲击作用,一般要小心使用。
方案二,采用PI调节器,PI调节器能够做到无静差调节,且电路较PID 调节器简单,故采用方案二。
1.2转速环调节器方案一,采用PID调节器,PID调节器是最理想的调节器,能够平滑快速调速,但在实际应用过程中存在微分冲击,将对电机产生较大的冲击作用,一般要小心使用。
方案二,采用PI调节器,PI调节器能够做到无静差调节,且电路较PID 调节器简单,故采用方案二。
2双闭环调速控制系统电路设计及其原理2.1综述随着现代工业的发展,在调速领域中,双闭环控制的理念已经得到了越来越广泛的认同与应用。
相对于单闭环系统中不能随心所欲地控制电流和转矩的动态过程的弱点。
双闭环控制则很好的弥补了他的这一缺陷。
双闭环控制可实现转速和电流两种负反馈的分别作用,从而获得良好的静,动态性能。
其良好的动态性能主要体现在其抗负载扰动以及抗电网电压扰动之上。
正由于双闭环调速的众多优点,所以在此有必要对其最优化设计进行深入的探讨和研究。
本次课程设计目的就是旨在对双闭环进行最优化的设计。
2.2整流电路本次课程设计的整流主电路采用的是三相桥式全控整流电路,它可看成是由一组共阴接法和另一组共阳接法的三相半波可控整流电路串联而成。
共阴极组VT1、VT3和VT5在正半周导电,流经变压器的电流为正向电流;共阳极组VT2、VT4和VT6在负半周导电,流经变压器的电流为反向电流。
变压器每相绕组在正负半周都有电流流过,因此,变压器绕组中没有直流磁通势,同时也提高了变压器绕组的利用率。
三相桥式全控整流电路多用于直流电动机或要求实现有源逆变的负载。
为使负载电流连续平滑,有利于直流电动机换向及减小火花,以改善电动机的机械特性,一般要串入电感量足够大的平波电抗器,这就等同于含有反电动势的大电感负载。
直流双闭环调速系统设计与仿真一、直流双闭环调速系统的基本原理电流环用于控制电机的电流,通过测量电机的电流反馈信号与给定的电流信号进行比较,得到误差信号,然后经过PID控制器计算控制信号,最后通过逆变器输出给电机控制电流。
二、直流双闭环调速系统的设计1.确定系统参数:包括电机的转矩常数,转矩惯量,电感,电阻等参数。
2.设计速度环控制器:根据转速信号和转速误差信号,设计速度环控制器的传递函数。
可以选择PID控制器,也可以选择其他类型的控制器。
3.设计电流环控制器:根据电流信号和电流误差信号,设计电流环控制器的传递函数。
同样可以选择PID控制器或其他类型的控制器。
4.进行系统仿真:将设计好的速度环和电流环控制器加入电机模型,进行系统仿真。
通过调整控制器参数,观察系统的响应特性,可以优化系统性能。
5.调整控制参数:根据仿真结果,调整控制器的参数,使系统响应更加快速、稳定。
三、直流双闭环调速系统的仿真1.定义系统模型:建立直流电机的状态方程,包括速度环和电流环的动态方程。
2.设定系统初始条件和输入信号:设置电机的初始状态和给定的转速信号以及电流信号。
3.选择控制器类型和参数:根据设计要求,选择控制器类型和参数。
可以选择PID控制器,并根据调试经验选择合适的参数。
4.搭建控制系统模型:将速度环和电流环的控制器模型和电机模型连接在一起,构建闭环控制系统模型。
5.进行系统仿真:利用MATLAB或其他仿真软件进行系统仿真,根据给定的转速信号和电流信号,观察系统的响应特性。
四、直流双闭环调速系统的优化1.参数调整:根据仿真结果,调整控制器的参数,使系统的性能得到优化。
可以通过试探法或自适应调节方法进行参数调整。
2.饱和处理:考虑到电机的饱和特性,可以在控制器中添加饱和处理模块,以提高系统的稳定性和抗干扰能力。
3.鲁棒性设计:考虑到系统参数的不确定性,可以采用鲁棒控制方法,提高系统的鲁棒性能。
4.死区补偿:在电机控制中常常会出现死区现象,可以在控制器中添加死区补偿模块,以减小死区对系统性能的影响。
直流电机双闭环调速系统设计(总44页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--存档日期:存档编号:本科生毕业设计(论文)论文题目:直流电机双闭环调速系统设计姓名:徐震杰学院:电气工程及自动化专业:自动化班级、学号: 10电51 指导教师:甘良志江苏师范大学教务处印制摘要直流调速系统的控制一般都是由转速、电流反馈来完成的,它的静态性能和动态性能都是十分杰出的,正是由于它的这些优点使其使用范围也很广泛。
其主要通过晶闸管可控整流电源来调节电源的大小。
根据题目的设计要求,调速系统一共有两个控制器,它们分别是转速控制器(ASR)和电流控制器(ACR)。
速度控制系统的电源电路的设计是使用三相全控桥整流电路实现的。
在设计中,首先对总体规划的设计图进行了确定。
之后又对主电路的结构形式以及各个元器件进行了确定和设计。
与此同时,对包括晶闸管、电抗器等元件的参数进行了计算。
在本文的最后一个部分,主要围绕本设计最重要的部分,直流调速系统的转速环和电流环进行设计。
为了使速度和电流两个负反馈可以发挥一定的作用,因此,应该使其嵌套连接在速度和电流负反馈之间。
单纯的从布局上来看的话,电流环在转速环的内部,因此电流环被叫做内环,相应的转速环就被称为外环。
这样设计之后,以电流负反馈、转速负反馈为核心的调速系统就这样形成了。
在对所有部分设计都完成了之后,采用MATLAB对整个系统进行仿真实验,并对数据进行分析,得出结论。
关键词:直流电动机双闭环调速系统转速负反馈电流负反馈AbstractThe speed and current feedback control of dc speed control system has excellent static and dynamic performance and the most widely application scope. It through thyristor controlled rectifying power supply to adjust the size of the power supply mainly. According to the design requirements of the title, it uses ASR and ACR as the controller of speed control system in the control circuit. The power supply circuit of the speed control system of design uses the Sedan fully-controlled bridge rectifier circuit. Firstly, we need determine the overall plan and diagram of this design before the design. Secondly, we need identify and design the structure of main circuit and the various components. At the same time, including the parameters of thyristor, reactor, etc. Finally, focus on the design of the most important two parts which are speed loop and current loop dc speed control system in the design. In the system were introduced speed negative feedback and current feedback and the implementation of a nested connection can realize the speed and current two kind of negative feedback effect between the two respectively. On the layout of it simply, current loop is referred to as the inner ring, because it is in the inside. Speed ring is called the outer ring, because current loop is in the interior of the speed loop. Through this design, the core of the double closed loop speed regulation system: speed negative feedback and current feedback is formed. After all parts of the design is done, using MATLAB simulation to do the experiments to the whole system and analyze the data, we can safely draw the conclusion.Keywords: DC motor; double closed loop; speed ring; current loop目录摘要 ..................................................................... 错误!未定义书签。
直流电机调速控制系统设计1.引言直流电机调速控制系统是一种广泛应用于工业生产与生活中的电气控制系统。
通过对直流电机进行调速控制,可以实现对机械设备的精确控制,提高生产效率和能源利用率。
本文将介绍直流电机调速控制系统的设计原理、控制策略以及相关技术。
2.设计原理直流电机调速控制系统的基本原理是通过调整电压或电流来改变电机的转速。
在直流电机中,电压和电流与转速之间存在一定的关系。
通过改变电压或电流的大小,可以实现对电机转速的调节。
为了实现精确的调速控制,通常采用反馈控制的方式,通过测量电机转速,并与设定值进行比较,控制输出电压或电流,以达到期望的转速。
3.控制策略开环控制是指在没有反馈的情况下,直接控制输出电压或电流的大小,来实现对电机转速的调节。
开环控制的优点是简单、成本低,但缺点是无法考虑到外界的扰动和电机的非线性特性,使得控制精度较低。
闭环控制是指在有反馈的情况下,测量电机转速,并与设定值进行比较,控制输出电压或电流。
闭环控制的优点是能够考虑到外界的扰动和电机的非线性特性,提高控制精度。
常用的闭环控制策略有PID控制、模糊控制和神经网络控制等。
其中,PID控制是最为常用的一种控制策略,具有调节速度快、控制精度高的优点。
4.相关技术在直流电机调速控制系统的设计中,还需要用到一些相关的技术,如编码器、传感器和驱动器等。
编码器是一种测量旋转角度和速度的装置,可以用来测量电机的转速。
根据编码器的测量结果,可以对电机进行控制。
传感器可以用来检测电机的电流、电压和转速等参数,以获得电机的实时状态。
通过对这些参数的测量和分析,可以实现对电机转速的控制。
驱动器是将控制信号转换为电机运行的电路,可以根据输入的电压或电流信号控制电机的运行状态。
5.总结直流电机调速控制系统是一种重要的电气控制系统,可以实现对机械设备的精确控制。
在设计过程中,需要合理选择控制策略和相关技术,以实现期望的控制效果。
通过不断的研究和实践,可以进一步提高直流电机调速控制系统的性能和稳定性,满足不同领域的需求。
基于PID控制的直流电机转速闭环控制系统设计一、绪论直流电机广泛应用于工业自动化控制系统中,对其转速进行精确控制是提高系统性能和稳定性的关键。
PID控制技术是一种经典且常用的控制方法,被广泛应用于直流电机转速控制系统中。
本文旨在设计一个基于PID控制的直流电机转速闭环控制系统,实现对电机转速的精准控制。
二、直流电机转速控制系统结构直流电机转速闭环控制系统主要由以下几个部分组成:1. 直流电机:负责将电能转化为机械能,并提供给待控对象。
2. 传感器:用于测量电机转速,将测得的转速信号反馈给控制系统。
3. 控制器:根据测量的转速信号与设定值之间的差异,计算控制信号,并输出给执行器。
4. 执行器:根据控制信号控制电机的转速,通过调节电机输入电流实现转速控制。
三、PID控制器原理PID控制器是一种基本的比例-积分-微分控制器,通过调节这三种控制分量的权重,实现对系统的控制。
具体原理如下:1. 比例控制分量:根据测量值与设定值之间的差异,产生与差值成正比的控制信号,用于快速响应系统误差。
2. 积分控制分量:根据时间与误差的乘积进行积分,用于消除系统误差的稳态偏差。
3. 微分控制分量:根据误差的变化率进行微分,用于增强系统的稳定性,减小超调量。
四、基于PID控制的直流电机转速闭环控制系统设计步骤1. 系统建模:根据直流电机的特性以及系统的动力学方程,建立数学模型,描述电机的转速与输入电流之间的关系。
2. 参数调整:根据实际情况,通过试验或者经验,调整PID控制器的三个控制参数:比例系数(Kp),积分时间(Ti),微分时间(Td),以获得系统的最佳控制效果。
3. 信号采集与处理:利用传感器获取电机转速的测量值,然后经过滤波和放大等处理,得到合适的输入信号。
4. PID控制计算:根据测量值与设定值之间的差异,计算PID控制器的输出信号。
5. 信号放大与转换:将PID控制器输出的控制信号进行放大,并转换为合适的电压或电流信号,用于控制电机的转速。
课程设计题目:直流电动机双闭环控制系统学院计算机科学与信息工程专业年级13自动化2班学生姓名庞超明学号2013133231指导教师吴诗贤职称讲师日期2016-11-30目录摘要 (2)一、设计任务 (3)1、设计对象参数 (3)2、课程设计内容及要求 (3)二、双闭环直流调速系统结构图 (4)1、整流装置的选择 (4)2、建立双闭环调速系统原理结构图 (4)三、电流环和转速环的工程设计 (5)1、直流双闭环调速系统的实际动态结构框图 (5)2、电流环设计 (6)2.1电流环结构框图 (6)2.2电流调节器结构的选择 (6)2.3电流调节器参数的计算 (7)3、转速环的设计 (9)3.1转速环结构框图 (9)3.2转速调节器结构的选择 (9)3.3转速调节器的参数计算 (10)三、双闭环控制系统仿真 (11)1、系统仿真模型 (11)2、动态性能分析 (14)四、总结 (16)参考文献 (17)摘要本设计通过分析直流电动机双闭环调速系统的组成,设计出系统的电路原理图。
同时,采用工程设计的方法对直流双闭环调速系统的电流和转速两个调节器进行设计,先设计电流调节器,然后将整个电流环看作是转速调节系统的一个环节,再来设计转速调节器。
遵从确定时间常数、选择调节器结构、计算调节器参数、校验近似条件的步骤一步一步的实现对调节器的具体设计。
之后,再对系统的起动过程进行分析,以了解系统的动态性能。
最后用MATLAB软件中的Simulink模块对设计好的系统进行模拟仿真,得出仿真波形。
关键词:直流电动机双闭环MATLAB/Simulink 仿真一、设计任务1、设计对象参数系统中采用三相桥式晶闸管整流装置;基本参数如下:直流电动机:220V,136A,1500r/min,Ce=0.15V/( r.min-1),允许过载倍数1.5。
晶闸管装置:Ks=50电枢回路总电阻:R=0.6Ω时间常数:Tl=0.03s,Tm=0.2s反馈系数:α=0.007V/( r.min-1) ,β=0.05V/A反馈滤波时间常数:τoi =0.002s,τon=0.002s2、课程设计内容及要求2.1建立双闭环调速系统的模型;绘出结构图。
PWM直流双闭环调速系统设计引言PWM(Pulse Width Modulation)直流双闭环调速系统是一种常用于电动机调速的控制系统。
在许多应用中,需要对电动机的速度进行精确控制,以满足不同的工作需求。
PWM直流双闭环调速系统通过不断调整电动机输入电压的占空比,使电动机保持稳定的转速,具有快速响应、良好的稳定性和较大的负载适应能力等优点。
本文将介绍PWM直流双闭环调速系统的设计原理、硬件电路和控制算法,并提供代码示例和性能分析。
设计原理闭环控制系统PWM直流双闭环调速系统由两个闭环控制回路组成:速度闭环和电流闭环。
速度闭环通过反馈电动机的实际转速来调整电动机输入电压,以使其达到期望转速。
电流闭环通过反馈电动机的实际电流来调整PWM信号的占空比,以使电动机输出的扭矩与负载要求相匹配。
速度闭环控制速度闭环控制由速度传感器、比例积分控制器和电动机驱动器组成。
速度传感器通常采用编码器或霍尔传感器来测量电动机转速,并将其转换为电压信号。
比例积分控制器根据速度误差和积分误差来计算控制器输出,并将其输入给电动机驱动器。
电流闭环控制电流闭环控制由电流传感器、比例积分控制器和PWM模块组成。
电流传感器用于测量电动机的电流,并将其转换为电压信号。
比例积分控制器计算电流误差和积分误差,并生成控制器输出,将其输入给PWM模块。
硬件电路设计PWM直流双闭环调速系统的硬件电路设计包括电源模块、电流传感器、速度传感器、比例积分控制器、PWM模块和电动机驱动器等。
电源模块电源模块用于提供系统所需的直流电压。
它可以采用稳压稳流电路来稳定输出电压和电流。
电流传感器电流传感器用于测量电动机的电流。
常用的电流传感器包括霍尔传感器和电阻传感器。
它将电动机的电流转换为电压信号,并输入给比例积分控制器。
速度传感器速度传感器用于测量电动机的转速。
常用的速度传感器有编码器、霍尔传感器和光电传感器等。
比例积分控制器比例积分控制器是PWM直流双闭环调速系统的核心控制模块。
.闭环直流机电控制系统结构设计第 1 章概述目前调速系统分为交流调速和直流调速系统 , 由于直流电动机具有良好的起、制动性能,调速围广,静差率小,稳定性好以及具有良好的动态性能,在不少需要调速或者快速正反向的电力拖动领域中得到了广泛的应用。
近年来,高性能交流调速技术发展很快 ,随着其应用围的逐渐扩大,有着取代直流调速系统的发展趋势。
为了提高直流调速系统的动态、静态性能,通常要采用闭环控制系统。
在对调速指标要求不高的场合 ,采用转速单闭环系统是最经济的选择 ,正因为这样 ,单闭环直流机电调速系统在日常生活中的应用越来越广泛 ,其良好的调速性能也被大众所认同。
闭环系统把一部份的输出信号反馈回输入端,与输入端的信号进行比较 ,其差值作为实际的输入信号 ,能自动地调节输入量,提高系统的稳定性。
在对调速系统有较高要求的领域,常利用直流电动机 ,然而,直流电动机开环系统稳定性不高 ,系统有较大转速差 ,不能够满足要求,所以可以利用转速单闭环系统来提高稳态精度。
但是,采用比例调节器的负反馈调速系统还是有静差的 ,为了消除系统静差 ,可以采用积分调节器代替比例调节器。
单闭环直流调速系统由整流变压器、晶闸管整流调速装置、平波电抗器、测速发机电、闭环控制系统组成。
通过调整晶闸管的控制角来调节转速 ,非常方便,高效。
.直流电动机有三种调速方法:①改变电枢电压调速②改变励磁磁通调速③改变电枢回路电阻调速对于要求在一定围无级平滑调速的系统来说 ,以调节电枢电压的调速方式是最好的。
减弱磁通虽然能够平滑调速,但调速围小,只能在基速上作小围弱磁升速。
改变电阻只能实现有极调速。
对于小功率调速系统调压调速的实现也是非常简单的。
所以本设计方案确定调速方式为调压调速。
调节电枢电压需要有专门的可控直流电源,时常采用的 3 种直流电源如下:①旋转变流机组:由交流机电和直流机电组成,以获得可调的直流电压。
②静止式可控整流器:用静止式可控整流器也可获得可调的直流电压。
③直流斩波器\脉宽调制变换器:利用电力电子开关器件斩波或者进行脉宽调制,产生可变平均电压。
旋转变流机组组成的〔V-M 调速系统需要至少两台与调速电动机容量相当的旋转机电,还要一台励磁发机电,因此设备多,体积大,费用高,效率低,安装须打地基,运行有噪声,维护不方便,所以基本不被采用。
由全控型电力电子器件组成的 PWM 调速系统比较先进,可靠性高、不会失控〔避免了逆变颠覆恶性故障发生且功率因数为 1 〔节能减排 ,缺点是价格〔成本太高了。
晶闸管整流控制直流的技术虽然落后了,但是技术成熟、价格〔成本低廉,虽然对电网依赖性强,容易失控导致逆变颠覆,但对于不可逆小功率机电控制系统来说不必考虑逆变颠覆的情况,在考虑到成本的情况下,选择晶闸管是最优的。
由于直流电动机开环系统稳定性不高 ,系统有较大转速降落 ,不能够.满足要求,所以采用转速单闭环系统来提高稳态精度。
综合上述情况,本设计采用由晶闸管组成的不可逆单闭环直流调压调速。
由自动控制原理可知 ,反馈控制的闭环调速系统是按被控量的偏差进行控制的系统,只要被调量浮现偏差,它就会自动产生纠正偏差的作用。
调速系统的转速降落正是由负载引起的转速偏差 ,引入转速反馈环的调速系统可以大大减少转速落差。
图 2-1 系统控制原理图与电动机同轴安装一台测速发机电TG,从而引出与被调量转速成正比的负反馈电压 Un,与给定电压 Un*相比较后,得到转速偏差电压△Un,经过放大器A,产生电力电子变换器UPE 所需的控制电压Uc,用以控制电动机的转速。
这样的反馈控制系统按被调量〔转速 n 的偏差进行控制,只要被调量浮现偏差,它就会自动产生纠正偏差的作用。
这里的平波电抗器用来减少电流的脉动和延长晶闸管导通的时间。
.由于三相半波可控整流电路在其变压器的二次电流中含有直流分量 ,不适合变压器的长期运行,所以不予采用。
本设计采用三相桥式全控整流电路。
图 3-1 主电路原理图根据机电参数 U =U =220V,I =I =12.35A,忽略晶闸管导通d N d N压降,由三相全控整流电路平均值公式:当α=0 时解得:U =90.0V2I =0.816I =10.10A2 d由得变压器容量:S=1.57kw加在管子上的最大反向电压:=220.4V流过管子的平均电流:Iv=Id/3=4.12A所以可选额定电流为 10A 〔考虑到两倍裕量 ,最大反向工作电压为100-1000V 的整流二极管。
由于本设计对高速型能要求不高 ,考虑到成本所以选择普通〔螺栓型号为 KP-10 的晶闸管。
.在电源设计中,滤波电容的选取原则是,对于 50HZ 的正弦交流电的整流滤波来说:电容的耐压≥ 电压有效值〔 1+30%大电容C≥2.5T/R,即 C 的大小:RC≥〔3--5×0.1s由于Ra=1.7 Ω ,取C≥<0.016854-0.028089>F。
大电容在电路中,负载越重,吸收电流的能力越强,这个电容的容量应该取得很大。
C 的值应大于16854μF,这里取18000μF,用两个电容 C0、C1 串联组成,即每一个电容 9000 μF,固然,若经济允许取到C≥5T/R 都没问题。
本设计电容耐压300V。
小电容 C1 的耐压取 300V,电容量凭经验,普通104 μF 即可。
〔mH>三相全控桥中 K1=0.693;U2Φ=0.46;最小负载电流〔对应直流机电最小机械负载普通取电动机额定电流的 5%-10%。
这里取 Idmin=10%IN=1.24A。
所以 L1=0.26mH。
常用的过电流保护方法有:限流控制保护、控制极脉冲封锁〔动作时间在10ms 摆布、快速熔断器保护。
本设计直接采用快速熔断器保护。
本设计使用组容吸收电路 ,即在晶闸管器件上并联电阻电容。
它的作用是保护晶闸管器件关断引起的过电压。
因电容 C 两端电压不能突变,可吸收关断时引起的反向尖峰电压。
电阻 R 有两个作用,一是阻挠 LC 电路发生振荡〔因电路总有电感 L 存在,二是限制晶闸管导通时电容 C 放电电流的上升率。
图 3-2 过压保护电路.本系统控制回路由转速闭环回路 ,触发电路,和电流截止负反馈电路组成 , 其电路原理图如下所示。
图 4-1 转速负反馈原理图〔带电流截止负反馈本设置使用了电流截止负反馈 ,主要使用霍尔电流传感器对电流进行检测,传感器串联如电枢回路中。
有电流流过时,在输出端产生偏差电压 ,经过分压电阻调节 ,输入到电流截止负反馈环中。
随着技术的发展 ,集成的电力电子触发电路已经非常成熟,而且价格低廉。
所以本设计主要使用 TC787<AP>这款芯片。
TC787<AP>是采用先进 IC 工艺设计制作的单片集成电路,合用于三相可控硅移相触发电路 ,能构成多种调压调 装置。
该电路作为 TCA785 的换代产品,与目前国市场上流行的 KC 系列 电路相比,具有功耗小、功能强、输入阻抗高、抗干扰性能好、移相围宽, 外接元件少等优点;而且装调简便 ,使用可靠。
只需要一块这样的集成电 路,就可以完成三块 TCA785 或者五块 KC 系列器件组合〔三块 KC009 或者 KC004,一块 KC041,一块 KC042 才干具有的三相移相功能。
其为提高整机 寿命,缩小体积,降低成本提供了一种新的更加有效的途径。
该芯片特点如下:1.电路采用单电源工作,电源电压 8V~15V 。
2.三相触发脉冲调相角可在 0~180°之间连续同步改变。
图 4-2 管脚图 速和变流.3.识别零点可靠,可方便地用作过零开关。
4.器件部设计有交相锁定电路,抗干扰能力强。
5.可用于三相全控触发〔6 脚接 VDD,也可用于三相半控触发〔6 脚接地。
6.电路备有输出保护禁止端,可在过流过压时保护系统安全。
7.TC787 输出为调制脉冲列,合用于触发可控硅及感性负载。
8.调制脉冲或者方波的宽度可根据需要通过改变电容 Cx 而选择。
电路原理:三相同步电压经过 T 型网络进入电路,同步电压的零点设计为 1/2电源电压〔电路输入端同步电压峰峰值不宜大于电源电压 ,通过过零检测和极性判别电路检测出零点和极性后 ,在 Ca、Cb、Cc 三个电容上积分形成锯齿波。
由于采用集中式恒流源,相对误差极小,锯齿波有良好的线性。
电容的选取应相对误差小 ,产生锯齿波幅度大且不平顶为宜。
锯齿波在比较器中与移相电压比较取得交相点 ,移相电压由 4 脚通过电位器或者外电路调节而取得。
抗干扰电路具有锁定功能 ,在交相点以后锯齿波或者移相电压的波动将不能影响输出 ,保证交相惟一并且稳定。
脉冲形成电路是由脉冲发生器给出调制脉冲〔TC787,调制脉冲宽度可通过改变 Cx 电容的值来确定,需要宽则增大 Cx,窄则减小 Cx, 1000P 电容约产生100 μS 的脉冲宽度。
被调制脉冲的频率-8/调制脉冲宽度。
脉冲分配及驱动电路是由 6 脚控制脉冲分配的输出方式,6 脚接高电平VH,输出为全控方式,分别输出A、-C;-C、B;B、-A;-A、C;C、-B;-B、A 的双触发脉冲,用户可以选择。
5脚为保护端,当系统浮现过流过压时,将 5 脚置高电平 VH,输出脉冲即被禁止。
5 脚还可以用作过零触发系统的控制端 ,输出端可驱动功率管,经脉冲变压器触发可控硅;也可直接驱动光电耦合器,经隔离触发可控硅或者驱动三级管。
图 4-3 TC787<AP> 部结构图 4-4 触发脉冲芯片电路.Z-22 型直流机电参数:机电极对数<p>:1额定电压〔U :220VN额定电流〔I :12.35AN电枢电阻〔Ra:1.7 Ω励磁电流〔I >:0.34Af额定转速〔n :3000r/minN机电转动惯量<J>:0.055kg ·m2(1)计算机电参数励磁电感 L 在恒定磁场控制下可取 0,则f电枢电感估算为:因为因此励磁电阻额定负载转矩为被设计的给定电压围〔U :0~10VN转速反馈系数在 Simulink 仿真环境下的实验步骤:①绘制系统仿真结构图,如同 5-1 所示。
并设置好相关参数。
在各处观察点设置示波器模块。
②对仿真模式进行设置,系统默认的仿真算法为 ode45,由于系统结构复杂,该算法仿真过慢,所以修改为 ode15s。
在该算法下,系统仿真速度合适,但是引入了误差。
但该误差不影响仿真结果。
③启动仿真。
图 5-1 系统仿真结构.为了解决反馈控制单闭环调速系统起动和堵转时电流过大的问题 ,系统中必须设有自动限制电枢电流的环节。
根据反馈控制的基本概念 ,要维持某个物理量基本不变,只要引入该物理的负反馈就可以了。
由于电流负反馈的引入会使系统的静特性变得很软 ,不能满足普通调速系统的要求 , 电流负反馈的限流作用只应在起动和堵转时存在 ,在正常运行时必须去掉, 使电流能自由地随着负载增减 ,所以要用到 Dead Zone 〔死区模块来限制截止负反馈的时间。