架空乘人装置设计说明
- 格式:doc
- 大小:5.61 MB
- 文档页数:12
贵州XXXX有限公司兴仁县XXX煤矿一采区运输下山架空乘人装置专项设计XXXX有限公司二〇二〇年六月贵州XXX有限公司XXXX煤矿一采区运输下山架空乘人装置专项设计总经理:总工程师:项目负责人:贵州贵煤矿山技术咨询有限公司二〇二〇年六月目录第一章矿井概况 (1)第二章编制依据 (2)第三章架空乘人装置 (3)第一章矿井概况祥隆煤矿(兼并重组)生产规模为30万 t/a,服务年限为15年。
采用斜井开拓,矿井划分一个水平(+1470m)三个采区,F4断层以北+1200m标高以上为一采区,F4断层以南与F6断层以北+1335m标高以上为二采区,F7断层东+1175m标高以上为三采区采区。
改造利用主斜井担负矿井煤炭的运输、人员的进出、同时担负进风、管线铺设任务。
新建利用副斜井担负矿井主要担负矿井材料、设备辅助运输、进风及排矸任务。
新建回风斜井担负矿井一采区的回风任务。
设计采用走向长壁后退式采煤法,布置一个走向长壁式综采工作面,全部垮落法管理顶板;矿井投产时,共配备1个高档普采工作面,3个掘进工作面,采掘比为1:3;井下煤炭运输采用胶带输送机,辅助运输为提升绞车,人员运输采用架空乘人装置,矿井采用并列式通风方式,通风方法机械抽出式,井下机械排水。
一、人员运输线路地面→主斜井(步行)→一采区运输下山(架空乘人装置)→各工作面。
二、一采区运输下山概况一采区运输下山平均倾角20°,斜长1060m,井筒净断面13.4m2,基岩段采用锚喷支护。
井筒内铺设胶带输送机及架空乘人装置,敷设部分动力电缆和通讯信号电缆等部分管线,担负矿井煤炭、人员的运输任务,设置行人台阶和扶手,同时兼进风及矿井的安全出口。
第二章编制依据1、《煤炭工业矿井设计规范》(GB50215-2015)2、《煤矿安全规程》(2016版)3、《煤矿井下辅助运输设计规范》(GB50533-2009)4、《煤矿用架空乘人装置安全检验规范》(AQ1038-2007)5、《煤矿用架空乘人装置》(MT/T1117-2011)6、《煤矿固定抱索器架空乘人装置技术条件》(MT/T873-2000)7、《地下矿用架空索道设计规范》(GB/T25652-2010)8、国家安全监管总局、国家煤矿安监局关于印发《煤矿安全规程执行说明(2016)》的通知(安监总煤装〔2016〕95号)第三章 架空乘人装置一、一采区运输下山架空乘人装置一)、设备选型一采区运输下山已安装一台-RJKY55—25/1350W (A )型煤矿固定抱索器架空乘人装置。
《煤矿用架空乘人装置安全检验规范》AQ1038-2007091 范围本标准规定了煤矿用架空乘人装置(以下简称“乘人装置”)的产品分类、检验要求、检验内容、检验方认、检验规则。
本本准适用于煤矿井下和露天煤矿中使用的乘人装置。
2 规范性引用文件(略)3 术语和定义3.1驱动轮直径驱动轮缠绳表面的径向尺寸称为驱动轮直径。
3.2 钢丝绳最大静张力与摩擦轮相切处的钢丝绳所允许承受的最大静载荷。
3.3 钢丝绳最大静张力差钢丝绳的上升侧与下放侧静载荷的最大差值。
3.4 制动力矩由闸块与制动盘或制动轮产生的摩擦阻力矩。
3.5 固定抱索器(最大适应倾角≤35°)与牵引钢丝绳紧固连接的抱索器。
吊椅随牵引钢丝绳绕驱动轮和尾轮运动,乘员无法取下吊椅和抱索器。
3.6活动抱索器(最大适应倾角≤18°)直接搭载在钢丝上的抱索器。
抱索器滑行进出钢丝绳,吊椅和抱索器不绕过驱动轮和尾轮。
3.7可摘挂抱索器(最大适应倾角≤35°)抱索器与钢丝绳间夹紧力产生的摩擦力带动吊椅和乘员随钢丝绳运动,吊椅和抱器不绕过驱动轮和层轮,乘员须自行摘、挂的抱索器。
4产品分类4. 1型式4. 1. 1结构型式乘人装置的结构型式为摩擦轮式,由电动机、减速箱或液压系统、驱动装置(包括驱动轮和机座等)、制动器、绳轮组(包括托绳轮、压绳轮、收绳轮和导向轮等)、乘人组(包括抱索器、吊椅等)、尾轮装置(包括尾轮、机座、张紧装置和导绳轮等)、牵引钢丝绳、安全保护装置、声光信号装置和电气控制系统等组成。
4.1.2乘人装置按运行方式分为:a)双侧运行;b)单侧运行。
4.1.3乘人装置按抱索器结构分为:a)固定抱索器;b)活动抱索器;c)可摘挂抱索器。
4.1.4乘人装置按制动方式分为:a)电液制动器制动;b)液压站制动;c)气动制动。
4.1.5乘人装置按张紧方式分为:a)液压张紧;b)重锤张紧。
4.1.6乘人装置按调速方式分为:a)变频调速;b)直流调速;c)液压调速;d)交流屯机;e)开关磁阻。
架空乘人装置设计说明设计说明:架空乘人装置一、引言二、设计原理1.线路:架空乘人装置行驶在一系列特殊设计的线路上,包括直线段、弯道和上下坡。
2.载具:乘人装置的载具使用轻质且强度高的材料,具有良好的空气动力学特性和电磁悬浮能力。
3.电磁悬浮系统:乘人装置通过电磁悬浮系统悬浮在线路上,同时利用电磁力进行前进和制动。
4.推进系统:乘人装置通过推进系统提供动力,包括电动机和能量储存装置。
三、设计要点1.安全性:乘人装置的设计应确保安全性是首要考虑因素。
应设置多重安全保护装置,包括制动系统、防护栏杆以及紧急停车装置。
同时,应设置全程监控系统,实时监测乘人装置的状态。
2.舒适性:乘人装置内部应提供良好的舒适感,包括座椅、空调系统和噪音减少装置。
同时,在设计过程中应考虑载客量和乘客流动性。
3.效率性:乘人装置应能够快速、高效地运输乘客。
因此,应确保设计的线路合理,最大程度减少弯道和坡道,同时提高推进系统的效率。
4.节能环保:乘人装置应采用节能环保的设计理念,包括智能能量管理系统、再生能源利用以及材料的再生利用。
四、技术挑战在设计架空乘人装置的过程中,面临一些技术挑战,如下:1.线路设计:线路应考虑不同地形和建筑物的高度差,同时确保线路的稳定性和安全性。
2.载具设计:载具应具有良好的空气动力学特性和稳定性,能够适应高速行驶和制动的要求。
3.电磁悬浮系统:电磁悬浮系统需要具备高精度、高效能的性能,能够实现快速的悬浮和制动。
4.推进系统:推进系统需要提供足够的动力,同时能够高效转换能源并减少能量损耗。
五、市场前景同时,架空乘人装置还具有一定的环保优势,可以减少对环境的污染,节约能源的消耗。
这符合当前社会对可持续发展的需求和重视程度。
六、结论在设计过程中,需重点考虑安全性、舒适性、效率性和节能环保等方面的要求。
同时,还面临一些技术挑战,如线路设计、载具设计、电磁悬浮系统和推进系统等。
由于其巨大的市场潜力和环保优势,架空乘人装置在城市交通和物流运输领域具有广阔的市场前景,并能满足可持续发展的需求。
福兴集团RJKY37-23/460型可摘挂抱索器架空乘人装置设计计算说明书煤炭工业设计研究院二〇一零年四月七日福兴集团RJKY37-23/460卡钳抱索器架空乘人装置设计计算说明书一、已知参数:总长:L总 =460m ;斜长:L=400m最大坡度:23°平均坡度23°二、主要参数的确定:1、预选电动机:YBK2-250M-6 37kw Ne=980转/分2、预选驱动轮:直径D=1.2m3、预选减速机:MC3RVSF06, i=62.600钢丝绳运行速度:V=K×(πD/60)×Ne/i=0.98×3.14×1.2/60×980/62.600=0.96m/s4、预选钢丝绳6×19S+NF-1670-ф205、设定乘坐间距为λ1=12m Q=3600×V/λ1=289人次/h6、托轮间距取λ2=8m7、驱动轮绳槽与牵引钢丝绳的摩擦系数μ=0.258、牵引绳在驱动轮上的围包角=1800三、牵引钢丝绳力的计算1、最小力S min = C×q×gSmin--最小力点的力, NC--钢丝绳的挠度系数,取C=1000q--预选牵引钢绳的每米质量,1.47kg/mg--重力加速度,g=9.8 m/s2Smin= 1000×1.47×9.8 = 14406N2、各点力① 当下放侧无人乘坐而上升侧满员时,线路运行阻力.(动力运行状态)W 4-1 =[q+(Q1+Q2)/λ1]×(ωcosα+sinα)Lg=[1.47+(95+15)/12]×(0.02×cos23°+sin23°) ×400×9.8 =15347NW 2-3 =q×(ωcosα-sinα)Lg=1.47×(0.02×cos23°-sin23°) ×400×9.8 =-1930N各点力:S3=Smin=14406N S4=1.01S3=14550NS 1=S4+W4-1=29897NS 2=S3-W2-3=16336NQ 1—每人人体重量,取Q1=95kg Q2--每把吊椅重量,取Q2=15kgL—巷道总长ω—牵引钢丝绳运行阻力系数,动力运行时,取ω=0.015~0.02制动运行时,取ω=0.008~0.012 ②当下放侧满员乘坐而上升侧无人乘坐时.(制动运行状态)W 4-1 =q×(ωcosα+sinα)Lg=1.47×(0.012×cos23°+sin23°) ×400×9.8 =2083NW 2-3 =[q+(Q1+Q2)/λ1]×(ωcosα-sinα)Lg=[1.47+(95+15)/12]×(0.012×cos23°-sin23°)×360×9.8 = -14241N各点力:S3=Smin=14406N S4=1.01S3=14550NS 1=S4+W4-1=16633NS 2=S3-W2-3=28647N四、驱动轮防滑校验:当下放侧无人乘坐而上升侧满员乘坐时,处于动力运行状态,S 1-S2>0 且 S1/S2=1.83<eμα (2.19) 符合要求当下放侧满座乘坐而上升侧无人乘坐时,处于制动运行状态,S 1-S2<0 且 S2/S1=1.72<eμα (2.19) 符合要求式中μ—钢丝绳与驱动轮衬垫摩擦系数,取μ=0.25 α—钢丝绳在驱动轮上的围包角。
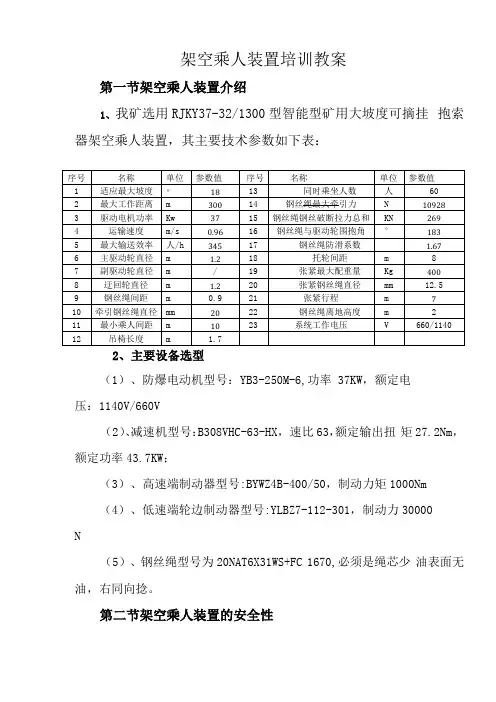
架空乘人装置培训教案第一节架空乘人装置介绍1、我矿选用RJKY37-32/1300型智能型矿用大坡度可摘挂抱索器架空乘人装置,其主要技术参数如下表:2、主要设备选型(1)、防爆电动机型号:YB3-250M-6,功率 37KW,额定电压:1140V/660V(2)、减速机型号:B308VHC-63-HX,速比63,额定输出扭矩27.2Nm,额定功率43.7KW;(3)、高速端制动器型号:BYWZ4B-400/50,制动力矩1000Nm(4)、低速端轮边制动器型号:YLBZ7-112-301,制动力30000N(5)、钢丝绳型号为20NAT6X31WS+FC 1670,必须是绳芯少油表面无油,右同向捻。
第二节架空乘人装置的安全性1、厂家标准、煤矿安全规程对架空乘人装置的要求,及我矿架空乘人装置的实际安全数值2、架空乘人装置的保护装置(1)、机头、机尾越位保护。
若乘坐人员到达下车点未能下车并摘下吊椅,当其越过越位保护点时,系统应自动停止运行。
(2)、欠速、过速保护当乘人装置运行速度低于设计速度的20%或高于设计速度的 20%时,会出现欠速或过速现象,出现此情况时,系统自动停止运行;(3)、张紧力下降保护当张紧装置不能使牵引钢丝绳保持恒张力,系统无法安全运行时,系统自动停止运行;(4)、全巷道突发事件紧急停车保护乘坐人员在乘坐途中,若发现紧急情况需要停车,则在乘车区域内的任一点,拉动急停开关拉线均可使系统停止运行,同时显示台显示故障发生的区间编号。
当绳间距大于或等于1600mm 或乘人装置中间行驶轨道车时,应安装二套全线急停装置,并分设在巷道的两边。
(5)、变坡点掉绳捕绳停车保护当变坡点处的牵引钢丝绳脱离托轮往外掉下时,捕绳器捕住钢丝绳,阻止钢丝绳继续往上、下掉,同时系统自动停止运行,以防止掉绳时吊椅和人落地而伤人。
(6)、减速机温度保护当减速机因某种原因而引起外壳温度超过允许值时,系统自动停止运行。
(7)、制动器动作失效保护电机启动前,制动器必须松闸,即处于非制动状态。
《煤矿用架空乘人装置安全检验规范》AQ1038-2007091 范围本标准规定了煤矿用架空乘为装置(以下简称“乘为装置”)的产品分类、检验要求、检验内容、检验方认、检验规则。
本本准适用于煤矿井下和露天煤矿中使用的乘为装置。
2 规范性引用文件(略)3 术语和定义3.1驱动轮直径驱动轮缠绳表面的径向尺寸称为驱动轮直径。
3.2 钢丝绳最大静张力与摩擦轮相切处的钢丝绳所允许承受的最大静载荷。
3.3 钢丝绳最大静张力差钢丝绳的上升侧与下放侧静载荷的最大差值。
3.4 制动力矩由闸块与制动盘或制动轮产生的摩擦阻力矩。
3.5 固定抱索器(最大适应倾角≤35°)与牵引钢丝绳紧固连接的抱索器。
吊椅随牵引钢丝绳绕驱动轮和尾轮运动,乘员无法取下吊椅和抱索器。
3.6活动抱索器(最大适应倾角≤18°)直接搭载在钢丝上的抱索器。
抱索器滑行进出钢丝绳,吊椅和抱索器不绕过驱动轮和尾轮。
3.7可摘挂抱索器(最大适应倾角≤35°)抱索器与钢丝绳间夹紧力产生的摩擦力带动吊椅和乘员随钢丝绳运动,吊椅和抱器不绕过驱动轮和层轮,乘员须自行摘、挂的抱索器。
4产品分类4. 1型式4. 1. 1结构型式乘人装置的结构型式为摩擦轮式,由电动机、减速箱或液压系统、驱动装置(包括驱动轮和机座等)、制动器、绳轮组(包括托绳轮、压绳轮、收绳轮和导向轮等)、乘人组(包括抱索器、吊椅等)、尾轮装置(包括尾轮、机座、张紧装置和导绳轮等)、牵引钢丝绳、安全保护装置、声光信号装置和电气控制系统等组成。
4.1.2乘人装置按运行方式分为:a)双侧运行;b)单侧运行。
4.1.3乘人装置按抱索器结构分为:a)固定抱索器;b)活动抱索器;c)可摘挂抱索器。
4.1.4乘人装置按制动方式分为:a)电液制动器制动;b)液压站制动;c)气动制动。
4.1.5乘人装置按张紧方式分为:a)液压张紧;b)重锤张紧。
4.1.6乘人装置按调速方式分为:a)变频调速;b)直流调速;c)液压调速;d)交流屯机;e)开关磁阻。
第64条架空乘人装置4.每年由具有检验资质的单位,按照《煤矿用架空乘人装置安全检验规范》(AQ1038-2007)和本技术规范要求,对架空乘人装置进行一次安全检测检验。
5.使用管理、考核、检查和维护⑴架空乘人装置要按照大型设备进行管理,明确由管理区队负责对架空乘人装置检查、维修和使用管理,做到一机一档(原则上要存到机电管理部门)。
⑵矿运输部门负责检查和考核,机电管理部门重点负责设备驱动部完好、电器安全保护装置的检查和试验工作。
矿井每月组织专业人员对架空乘人装置至少进行一次全面检查和考核。
⑶使用单位要规范架空乘人装置各类安全保护的试验周期、方法、内容和记录,制定架空乘人装置日历化检修图表。
特别要加强对超速保护、打滑保护、泵站工作压力和回油控制阀、安全闸、全程急停保护、防乘人越位保护、防逆行保护、防脱绳保护、防断绳保护、变坡点防掉绳保护、乘人间距控制器、减速器油温和油位检测保护、坠砣(或张紧缸)位置检测保护、尾轮保险绳、通讯及信号装置的试验和检查,将上述项目纳入管理人员的检查内容,明确试验和检查周期,形成制度,并在现场建立详细的记录。
5.维修单位每日必须对整个装置进行一次检查。
各类保护装置齐全、灵敏、可靠,并按规定周期进行试验,确保各类保护作用正常,并填写记录。
其中制动装置、全程急停保护、变坡点防掉绳保护、防乘人越位保护、坠砣(或张紧缸)位置检测保护、电气闭锁、通讯及信号装置等每天进行一次试验,减速机油温、油位检测保护每月试验一次,其它各类保护每旬试验一次。
并编制安全保护装置试验安全技术措施和试验方法说明。
⑴制动系统油压符合设计要求,回油阀畅通无阻。
⑵安全闸松闸状态下,闸瓦间隙不大于2mm,制动时,闸瓦与驱动轮紧密接触,有效接触面积不小于80%,制动可靠。
⑶工作闸松闸状态下,闸瓦间隙不大于2mm,闸带无断裂,磨损余厚不小于3mm,闸轮表面沟痕深度不小于1.5mm,沟宽总计不超过闸轮有效面积的10%。
煤矿固定抱索器架空乘人装置产品使用说明书目录1、产品概述 (1)2、基本参数表 (2)3、结构特征与工作原理 (2)4、机械系统安装 (8)5、电气控制系统 (10)6、技术要求 (16)7、安全警示 (16)8、常见故障及处理方法 (17)9、安全操作规程 (19)10、乘坐人员须知 (20)11、日常维护保养 (21)煤矿固定抱索器架空乘人装置产品使用说明书1.产品概述煤矿架空乘人装置(以下简称乘人装置), 是煤矿井下辅助运输设备,主要是运送人员上下斜井或平巷之用。
它主要由驱动装置、托(压)绳装置、乘人器、尾轮装置、张紧装置、安全保护装置及电控装置等组成(见图1)。
乘人装置钢丝绳运行速度低,乘人离地不高,具有运行安全可靠、人员上下方便、随到随行、不需等待、一次性投入低、动力消耗小、操作简单、便于维护、工作人员少和运送效率高等特点,是一种新型的现代化煤矿井下人员输送设备。
1.1产品分类产品按抱索器型式分:煤矿固定抱索器架空乘人装置、煤矿活动抱索器架空乘人装置、煤矿大坡度可摘挂抱索器架空乘人装置、煤矿单向活动抱索器架空乘人装置、煤矿单向大坡度可摘挂抱索器架空乘人装置、煤矿单向固定抱索器架空乘人装置。
本说明书主要描述RJY系列煤矿固定抱索器架空乘人装置。
1.2产品的规格型号如下:RJ □□□-□/□□□□修改序号驱动方式:变频调速为P,直流调速为Z,液压调速为U,开关磁阻为D,交流电机不注张紧方式:液压张紧(Y),重锤张紧不注补充参数:最大适用倾角,单位为度(°)/最大运输距离,单位为米(m)。
主参数:驱动功率,单位为千瓦(kW)制动方式:液压站为Z,电液制动器为Y,气动为Q乘人装置类别:双向活动抱索器(H),双向大坡度可摘挂抱索器(K),双向固定抱索器不注,单向活动抱索器(DH),单向大坡度可摘挂抱索器(DK),单向固定抱索器(D)产品类型:架空乘人装置示例1:采用电液制动器制动和重锤张紧,最大适用倾角25°,最大运输距离1800m,功率为90kW的交流电机驱动,固定抱索器架空乘人装置: RJY90-25/1800。
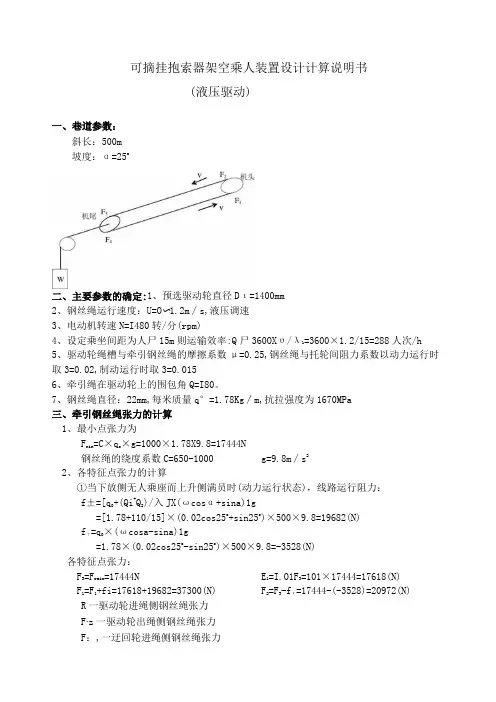
可摘挂抱索器架空乘人装置设计计算说明书(液压驱动)一、巷道参数:斜长:500m 坡度:α=25o二、主要参数的确定:1、预选驱动轮直径Dι=1400mm 2、钢丝绳运行速度:U=O 〜1.2m∕s,液压调速 3、电动机转速N=I480转/分(rpm)4、设定乘坐间距为人尸15m 则运输效率:Q 尸360OXυ/λ1=3600×1.2/15=288人次/h5、驱动轮绳槽与牵引钢丝绳的摩擦系数μ=0.25,钢丝绳与托轮间阻力系数以动力运行时取3=0.02,制动运行时取3=0.0156、牵引绳在驱动轮上的围包角Q=I80。
7、钢丝绳直径:22mm,每米质量q°=1.78Kg∕m,抗拉强度为1670MPa 三、牵引钢丝绳张力的计算 1、最小点张力为F nin =C×q o ×g=1000×1.78X9.8=17444N 钢丝绳的绕度系数C=650-1000 g=9.8m∕s 2 2、各特征点张力的计算①当下放侧无人乘座而上升侧满员时(动力运行状态),线路运行阻力: f±=[q 0+(Qi +Q 2)/入JX(ωcosα+sina)1g=[1.78+110/15]×(0.02cos25o +sin25o )×500×9.8=19682(N) f τ=q 0×(ωcosa -sina)1g=1.78×(0.02cos25o -sin25o )×500×9.8=-3528(N) 各特征点张力: F 3=F rain =17444N E 1=I.O1F 3=101×17444=17618(N) F 1=F 1+fi=17618+19682=37300(N) F 2=F 3-f τ=17444-(-3528)=20972(N) R 一驱动轮进绳侧钢丝绳张力F ∙z 一驱动轮出绳侧钢丝绳张力 F :,一迂回轮进绳侧钢丝绳张力F,一迂回轮出绳侧钢丝绳张力 Qi 一人和物总重量,取Q 1=95Kg Q2一吊椅重量,取Qz=15Kg 1--巷道斜长②当下放侧满员乘坐而上升侧无人乘坐时(制动运行状态),线路运行阻力:f 上二q°X (3cosQ+sina)1g=1.78×(0.015cos25o +sin250)×500×9.8=3805(N) f 下=[qo+(Q 1+Q2)/λ1]X(ωcosα-si∏α)1g=[1.78+110∕15]×(0.015cos25o -sin25o )×500×9.8=-18265(N)各点张力: F 3'=F min =17444(N)F 4=I.O1F 3=101X17444=17618(N) F 1^=F 1+fi=17618+3805=21423(N) F 2'=F 3-f 下=17444-(-18265)=35709(N)四、驱动轮防滑校验: 动力运行状态,且F 「F2>0F 1∕F 2=1.78<e μo (2.19)符合要求 制动运行状态,且F1F Z VOF 2'/F/=167<e μo (2.19)符合要求五、牵引钢丝绳校核m=F κ/F max =8.69>6Fk —钢丝绳钢丝破断拉力总和 m 一钢丝绳安全系数, F 1iax —最大张力点张力(F 1)因此选择直径<1>=22mm 抗拉强度为1670MPa 的钢丝绳,其最小钢丝破断拉力总和为324KN,符合要求。
架空式乘人装置设计(说明书)目录摘要........................................... 错误!未定义书签。
第一章绪论 .. (3)1.1 煤矿架空乘人装置定义 (3)1.2 煤矿架空乘人装置的构成 (3)1.3 煤矿架空乘人装置结构特点及其布置 (3)第二章工作原理 (6)第三章基本结构设计 .............................. 错误!未定义书签。
3.1 驱动部分 (7)3.1.1 电动器 (7)3.1.2 减速器 (7)3.1.3 制动器的确定 (12)3.2乘人部分 (13)3.3托绳部分 (13)3.4 尾轮及张紧装置 (14)3.4.1 尾轮 (14)3.4.2 张紧绞车部分 (15)3.4.3 配重锤部分 (16)3.5 电控系统 (16)3.5.1电气控制及信号系统 (16)3.5.2保护功能 (17)第四章架空乘人装置设计计算 (18)4.1原始数据(以下数据为例计算) (18)4.2主要预选参数的确定 (18)4.3主要参数的计算及器型的选择 (19)第五章设计存在的问题及结构的改进 (27)5.1架空乘人车装置设计存在问题 (27)5.1.1架空乘人车设计的临界值和防滑验算 (27)5.1.2吊座间距 (27)5.2架空乘人车装置结构的改进 (27)5.2.1刹车装置的研制及应用 (27)5.2.2吊座与钢丝绳连接装置的改进 (28)致谢........................................... 错误!未定义书签。
参考文献.. (28)第一章绪论1.1 煤矿架空乘人装置定义矿用索道(架空乘人装置)主要用于矿井斜巷,平巷运送人员,其工作原理类似于地面旅游索道。
它通过电动器带动减速器上的摩擦轮作为驱动装置,采用架空的无极循环的钢丝绳作为牵引承载。
钢丝绳主要靠尾部张紧装置进行张紧,沿途依托绳轮支撑,以维持钢丝绳在托轮间的饶度和张力。
架空乘人装置安装标准图 2 、机头部分的结构见图 1、2、3 ,采用担于巷道侧壁的两根横梁来架 空安装,留出机头下部用于人员和车辆通过。
机头横梁为 2 根 25 # 工字钢组焊梁,矿工钢之间的焊接采用断续焊接方法,间隔 150mm 焊接 100mm 长焊缝。
横梁的安装见图 4,按图中的高度和间距在巷图 4 、机头横梁机头部分的安装图 1 、机头主视图 图道侧壁用红漆标识位置,掏梁窝时保证每端埋入坚硬岩石壁的横梁长度不小于 600mm ,见图 3 。
横梁埋入后,钢梁底面与轨面平行,固定前按高度和间距要求进行检查,满足要求后进行固定横梁。
在顶板上两根横梁中心对称线的上方打两组起吊锚杆,一组在减速机的正上方,另一组距离 1m 。
锚杆露头处用于固定挂鼻或滑轮,如顶板高度达到要求时,挂鼻用于直接悬挂手拉葫芦来起吊。
起吊后,机头部分的固定是用驱动部安装夹板及长螺栓固定于驱动部横梁上,调整至驱动部中线与架空乘人装置中心线重合,紧固前用垫板调整夹板与横梁之间的缝隙,使驱动部的的平直度不大于 1/1000 ,以免把机头横梁的不直度和两根横梁的平行度误差带到机头部分内。
沿横梁调整机头的左右位置,使驱动轮中心线与设备总图中的乘人装置中心线重合。
二、机尾部分的安装图 5 、机尾主视图图 7 、剖视图机尾部分的安装为架空式安装,采用间距 1.5m 的 11 #矿用工字钢横担固定(机尾滑道横梁的数量为 6 根 11 号矿用工字钢),工字钢底面与轨面平行。
矿工钢的间距 1500mm 的误差在±10mm 之内,矿工钢的高度误差在± 10mm 之内。
钢梁固定后测量钢梁之间的距离和高度误差满足± 10mm 的要求,在钢梁和滑道之间用调整垫图 6 、机尾俯视图板,保证滑道的直线度不大于 2/1000 ,左右调整滑道使滑道中心线与设备总图中的乘人装置中心线重合,然后固定滑道。
打开滑道的端板,起吊机尾放入滑道内,固定滑道的端板。
可摘挂抱索器架空乘人装置施工方案施工组织设计编制:审核:目录一、工程概况二、本期工程施工内容三、现场组织系统四、施工组织系统五、施工组织管理机构六、工程质量管理及保证措施七、施工技术的安全措施八、总体施工方案九、施工工序的安排十、重点工序施工方法及技术要求十一、工期及施工进度计划一、工程概况小尾沟煤化有限公司技改矿井,设计井田开拓方式为斜井---立井、两个斜井,一个斜井为提升井,主要担负矿井提煤及进风任务,另一个斜井为辅助提升井,主要担负辅助提升人员、下放材料及进风任务,立井为回风井,副斜井采用架空乘人装置上下人.二、本期工程施工内容1、架空乘人装置设备主斜井安装架空乘人装置,运输斜长500m,倾角20度。
根据煤矿安全规程》第365条规定,垂深大于50m,应采用机械运送人员,根据井筒断面特征,选用一部RJKY37-25/720架空乘人器运输绞车,其技术参数:最大静张力为18228N,最大张力和为58800N,绳速1-0.75m/s,绳轮直径1200mm,速比63,电动机型号YB2-250M-6型,功率37KW,电压380V,外形尺寸:(宽×高)1330×890mm,质量2660kg。
三、现场的组织系统1、管理人员的职责:为快速、安全、优质达标完成本期施工任务,应强化现场管理,加强劳动纪律,施工班班长及每个成员都要从设备安装开始到设备投运为止,全过程实现全面质量管理,以各种记录表格来反映实际安装情况,以推动工程管理及达标工作向新水平迈进。
项目经理:负责工程总调度及安全施工的管理。
项目技术员:负责工时核对,设备材料的核实,对班组技术交底,负责联系施工中的材料,设备等需要协调解决的问题,协助经理工作,施工预算,结算及施工工作。
项目安检员:负责安全监督和每日安全生产标准化流程的实施,并负责对主要设备安装措施,方案进行审核,安全措施的检查工作。
全质办:负责质量监督,开展质量教育和质量的评比活动。
RJY37-36°/500 煤矿架空乘人装置设计方案贵阳高原矿山机械有限公司设计方案一、设计方案及说明1、巷道原始资料1.1斜长约500 米1.2平均坡度36 度(a=sin-1头尾高差/巷道全长)1.3最大坡度36 度1.4上平巷长10 米1.5下平巷长20 米1.6断面(头、尾、中间巷)1.7巷道支护情况(主、副、出风井实测图等)1.8用户其他要求2、设计方案2.1主要参数的选择,计算的结果:2.1.1运行速度0.8 m/s2.1.2单边(上或下)运人效率:180 人/小时2.1.3单边最大同时乘人数:27 人2.1.4钢丝绳最大受力36 KN(一般为S1)2.1.5驱动力16 KN(S1~S2)2.1.6选用钢丝绳型号6*19φ20 ——右交,无油,麻芯。
2.1.7钢丝绳安全系数:6.92.1.8驱动轮衬垫比压:T1+T2/D·d=278N/cm22.1.9计算驱动功率:22 KW2.1.10所选电机型号:YB2-225M-630KW2.1.11驱动轮直径φ1.0 米2.1.12变速器型号:B3HV07-632.2我国《煤矿安全规程》(2010年版)中对架空乘人装置有关规定如下:第368条第(二)款要求:“蹬座中心至巷道一侧的距离不得小于0.7米,运行速度不得超过1.2米/秒,乘座间距不得小于5米”。
第416条第(三)款:“井下架空乘人装置的主导轮和尾导轮、围包角大于90o C的天轮”,其直径不得小于钢丝绳直径的60倍。
第400条规定:“架空乘人装置钢丝绳悬挂时的安全系数的最低值为6”。
2.3设计说明2.3.1电机功率计算驱动功率为22 KW,考虑增加运量、速度、变坡多等因素选定电机功率为30 KW。
2.3.2由计算可知选用钢丝绳6*19—20 1670右同钢丝绳,其安全系数为 6.9 。
为加大驱动摩擦系数,要求绳不涂油,钢丝涂增摩剂。
2.3.3根据主动轮与钢丝绳直径,本方案选用驱动轮直径为 1.0 米。
架空乘人装置规范AQ1038 2021架空乘人装置规范aq1038-2021煤矿架空客运设备安全检验规程aq1038-2021091范围本标准规定了煤矿用架空乘人装置(以下简称“乘人装置”)的产品分类、检验要求、检验内容、检验方认、检验规则。
本标准适用于地下煤矿和露天煤矿使用的乘客设备。
2规范性参考文件(略)3术语和定义3.1驱动轮直径驱动轮缠绳表面的径向尺寸称为驱动轮直径。
3.2钢丝绳最大静张力与摩擦轮相切的钢丝绳允许承受的最大静载荷。
3.3钢丝绳最大静张力差钢丝绳的上升侧与下放侧静载荷的最大差值。
3.4制动力矩制动片与制动盘或制动轮产生的摩擦阻力力矩。
3.5固定式电缆支架(最大自适应倾角)≤ 35 °)与牵引钢丝绳紧固连接的抱索器。
吊椅随牵引钢丝绳绕驱动轮和尾轮运动,乘员无法取下吊椅和抱索器。
3.6可移动电缆支架(最大自适应倾角)≤ 18 °)直接搭载在钢丝上的抱索器。
抱索器滑行进出钢丝绳,吊椅和抱索器不绕过驱动轮和尾轮。
3.7可摘挂抱索器(最大适应倾角≤35°)缆绳夹持器与钢丝绳之间的夹紧力产生的摩擦力驱动吊椅和乘客随钢丝绳移动。
吊椅和缆索架不得绕过驱动轮和层轮,乘客必须自行取下并悬挂缆索架。
4产品分类4.1型式4.1.1结构类型乘人装置的结构型式为摩擦轮式,由电动机、减速箱或液压系统、驱动装置(包括驱动轮和机座等)、制动器、绳轮组(包括托绳轮、压绳轮、收绳轮和导向轮等)、乘人组(包括抱索器、吊椅等)、尾轮装置(包括尾轮、机座、张紧装置和导绳轮等)、牵引钢丝绳、安全保护装置、声光信号装置和电气控制系统等组成。
4.1.2根据运行模式,乘客设备分为:a)双边运行;b)单侧手术。
4.1.3乘人装置按抱索器结构分为:a)固定抱索器;b)活动抱索器;c)可摘挂抱索器。
4.1.4根据制动方式,乘客设备分为:a)电液制动器制动;b)液压站制动;c)气动制动。
4.1.5根据张紧方式,乘客装置分为:a)液压张紧;b)重锤张拉。
RJY37-36°/500 煤矿架空乘人装置
设计方案
贵阳高原矿山机械有限公司
设计方案
一、设计方案及说明
1、巷道原始资料
1.1斜长约500 米
1.2平均坡度36 度(a=sin-1头尾高差/巷道全长)
1.3最大坡度36 度
1.4上平巷长10 米
1.5下平巷长20 米
1.6断面(头、尾、中间巷)
1.7巷道支护情况(主、副、出风井实测图等)
1.8用户其他要求
2、设计方案
2.1主要参数的选择,计算的结果:
2.1.1运行速度0.8 m/s
2.1.2单边(上或下)运人效率:180 人/小时
2.1.3单边最大同时乘人数:27 人
2.1.4钢丝绳最大受力36 KN(一般为S1)
2.1.5驱动力16 KN(S1~S2)
2.1.6选用钢丝绳型号6*19φ20 ——右交,无油,麻芯。
2.1.7钢丝绳安全系数:6.9
2.1.8驱动轮衬垫比压:T1+T2/D·d=278N/cm2
2.1.9计算驱动功率:22 KW
2.1.10所选电机型号:YB2-225M-630KW
2.1.11驱动轮直径φ1.0 米
2.1.12变速器型号:B3HV07-63
2.2我国《煤矿安全规程》(2010年版)中对架空乘人装置有关规定如下:第368条第(二)款要求:“蹬座中心至巷道一侧的距离不得小于0.7米,运行速度不得超过1.2米/秒,乘座间距不得小于5米”。
第416条第(三)款:“井下架空乘人装置的主导轮和尾导轮、围包角大于90o C的天轮”,其直径不得小于钢丝绳直径的60倍。
第400条规定:“架空乘人装置钢丝绳悬挂时的安全系数的最低值为6”。
2.3设计说明
2.3.1电机功率
计算驱动功率为22 KW,考虑增加运量、速度、变坡多等因素选定电机功率为30 KW。
2.3.2由计算可知选用钢丝绳6*19—20 1670右同钢丝绳,其安全系数为 6.9 。
为加大驱动摩擦系数,要求绳不涂油,钢丝涂增摩剂。
2.3.3根据主动轮与钢丝绳直径,本方案选用驱动轮直径为 1.0 米。
2.3.4横梁的安装方式
一、下图为贯通梁。
安装中有一端掏洞为梁插入壁深的2倍,但该方式牢固可靠,外形整齐,条件允许者为首选方式。
二、下图为有支座安装方式。
一般适用煤巷通过锚杆插入较长的深度,以保证横梁的稳定性。
在一定的巷道条件下,如岩巷巷道低矮情况,支座也可采取下图形式。
四、下图为锚杆支撑梁,要求顶部岩石较好,施工难掌握,但节省材料,适用巷道低矮。
横梁的安装方式视巷道围巷情况、用户的具体需要具体决定。
贵矿选用第种横梁。
2.4主要部件介绍
本方案确定驱动装置结构形式为单槽架空驱
动装置。
该驱动装置主要包括防爆主电机、防爆液
力推杆制动器、连轴器、硬齿面减速机、驱动轮及
机架;主要特点为:结构紧凑、运行平稳。
减速机
按最新弗兰德硬齿面减速机标准生产,齿轮采用高
强度低碳合金钢经渗碳淬火而成,齿面硬度达
HRC58-62,齿轮均采用数控磨齿工艺,精度高,接
触性好,精度达到6级;运转平稳,噪音低,体积
小,重量轻;传动效率高达95%(蜗轮蜗杆为70%);
使用寿命长:寿命是蜗轮蜗杆减速机的2倍以上;
驱动轮衬块为德国技术生产的K25硬橡胶轮衬,该
轮衬摩擦系数大、耐磨性好。
G-2型固定抱索器:采用碟形弹簧产生预紧力能更
加安全可靠的夹紧钢丝绳,最大使用坡度能达到45
度,在大坡度的条件下大大提高了猴车的安全性。
(普通抱索器是靠一个直径16的小聚安脂棒的弹
性来夹紧钢丝绳的,但聚安脂棒容易被压坏或老化,
从而经常发生抱索器夹不紧钢丝绳而打滑出现安全
事故)
变坡点使用多双托轮:
使用多托绳轮组(双托轮或四托轮),受力均匀,自动调节定位,适用于不同的变坡情况。
轮衬为聚安脂材料,耐磨弹性好,寿命是橡胶材质的1.5倍
变坡点还设有掉绳保护装置(即捕绳器),一旦钢丝绳掉道发生,捕绳器捕绳后猴车自动停车,确保矿工人身安全。
托压轮装置:
适当安装托压轮能使钢丝绳不易掉道。
轮衬具有耐压、耐油、耐磨、阻燃、防静电等性能。
尾轮装置:
一般采取架空安装,结构简单、运行平稳。
吊椅防过摆装置:
该装置能有效防止吊椅因左右摆动较大时,托绳轮卡住吊椅而将人向上翻转造成人身伤害事故。
张紧收绳装置:
能自由调节迂回轮和重锤位置,并根据索道的负荷,
自动调节钢丝绳的拉力,确保猴车有足够的牵引力,
避免索道打滑和飞车的现象发生,只要1人扳动小
绞车手轮收绳,即可调整重锤高度,操作简便。
紧急停车装置:
在架空乘人装置运行的沿途中,设置突发事件的紧
急停车装置,以确保乘人安全。
架空乘人装置电控系统
PLC可编程电控箱液晶触摸屏操作台下车语音提示箱
架空乘人装置电控系统功能说明
1.本控制系统按照GB3836.1-4-2000及有关煤矿行业标准设计。
此系统由驱动电机的控制开关、制动油泵控制开关以及KXJ1-1.5/127型矿用隔爆兼本质安全型电气控制箱、TH1-0.5/24型矿用本质安全型电气操作台、外围传感器和信号开关等部分组成。
主电控箱采用日本三菱/西门子PLC,实现可编程控制,操作台配有液晶触摸屏,能中文和模拟图形动画显示。
2.5计算说明书
架空乘人装置设计算说明书
一已知参数
1 斜长(m)= 500 S1
2 坡度(°)= 36
二主要参数的确定
1 预选电动机 YB2-225M-6,30KW,Ne=980转/分
2 预选驱动轮直径(m) 1.00
3
预选减速机(减速比)63.0
钢丝绳运行速度(m/s)V=
V=K×(∏D/60)×Ne/i
0.80
钢丝绳运行时蠕动系数K= 0.98
4 预选钢丝绳(重量) 1.47 6×19-φ20,q0=1.47kg/m
5 设定乘座间距(m)L1= 16
运输效率(人/小时)=
Qr=3600×V/L1
180
6 托轮间距(m)L2= 9
7 驱动轮绳槽与牵引钢丝绳间的摩擦系数μ0.25
8 牵引绳在驱动轮上的围包角α180 三牵引钢丝绳张力的计算
1
最小点张力的计算
Smin=C×q0
×g
Smin——最小张力点的张力,N
C——钢绳的挠度系数900
q0——预选牵引钢绳的每米质量 1.47
g——重力加速度9.8
Smin= 12965 N
2 各点张力的计算。