第六章 机械的平衡习题与答案教学提纲
- 格式:doc
- 大小:225.51 KB
- 文档页数:12
第6章 机械的平衡6.1 复习笔记本章主要介绍了刚性转子的静平衡和动平衡计算和平面机构的完全平衡和部分平衡的计算。
学习时需要重点掌握刚性转子的静平衡和动平衡计算(质径积的计算),常以计算题的形式考查,而且几乎每年必考。
除此之外,静(动)平衡条件、完全平衡、部分平衡等内容,常以选择题、填空题和判断题的形式考查,复习时需要把握其具体内容,重点记忆。
一、机械平衡的目的及内容1.机械平衡的目的(1)设法平衡构件的不平衡惯性力,以消除或减小其带来的不良影响;(2)对于利用不平衡惯性力产生的振动来工作的机械,则需研究如何合理利用不平衡惯性力。
2.机械平衡的内容(1)绕固定轴回转的构件的惯性力平衡(见表6-1-1)表6-1-1 绕固定轴回转的构件的惯性力平衡(2)机构的平衡作平面复合运动或往复移动的构件产生的惯性力无法在构件本身上找到平衡,必须研究整个机构使各运动构件惯性力的合力以及合力偶得到完全的或部分的平衡,以消除或降低最终传到机械基础上的不平衡惯性力,满足上述条件的平衡称为机械在机座上的平衡。
二、刚性转子的平衡计算(见表6-1-2)表6-1-2 刚性转子的平衡计算图6-1-1 刚性转子的平衡计算三、刚性转子的平衡实验1.静平衡实验(见表6-1-3)表6-1-3 静平衡实验2.动平衡实验试验一般需在动平衡机上进行,动平衡机的内容见表6-1-4。
表6-1-4 动平衡机3.现场平衡对于一些大型和高速转子,由于装运、蠕变、电磁场或工作温度等的影响会破坏制造期间的平衡。
若制造期间的平衡遭到破坏,可在现场直接测量机器中转子支架的振动,来确定不平衡量的大小及方位,进而进行平衡。
四、转子的许用不平衡量和许用不平衡度(见表6-1-5)表6-1-5 转子的许用不平衡量和许用不平衡度图6-1-2 许用不平衡量的分配五、平面机构的平衡。

第六章 机械的平衡习题6-5解:通孔I 的失去质量为()kg b V m 766.0105014.35078004922=⨯⨯⨯⨯===-ρπφρ,I 处失去质量等效于在I 的对称处添加了一个质量为0.766kg 的质量块,因此等效后的图为质径积分别为质量I :mm kg r m I I I .6.76100766.0=⨯==κ质量II :mm kg r m II II II .1002005.0=⨯==κ取质径积比例尺mmm kg .01.0=κμ,作质径积多边形如图示,得平衡质量的质径积为 mm kg mr .1.1091091.10=⨯==κμκ方位为与x 轴正向夹角107o 。
但现在要制一通孔,则制在反向方位即可。
孔直径大小为mm m br b m 42042.0102005014.37800101.10944463==⨯⨯⨯⨯⨯⨯===Φ--ρπκρπ 孔的方位与x 轴反向成107o 夹角。
习题6-7解:先将质量块2、3的质径积向两个平衡面上分解,令l l l l ===342312,有cm kg l l r m I .30032301532222=⨯⨯==κcm kg l l r m II .1503130153222=⨯⨯==κcm kg l l r m I .3.133********=⨯⨯==κcm kg l l r m II .7.26632202032333=⨯⨯==κ质量块1和4在平衡面I 和II 上的质径积分别为cm kg r m I .4004010111=⨯==κ,cm kg r m I .3003010444=⨯==κ取质径积的作图比例尺mmm kg .1.0=κμ,作质径积的矢量图如下可得第I 个平衡面上所需质径积为285kg.cm ,第二个平衡面上所需质径积为381kg.cm 。
平衡质量分别为kg r m I IbI 7.550285===κ,方位:与x 轴正向夹角60。

第六章机械的平衡1 机械平衡分为哪几类?2何谓刚性转子与挠性转子?3 对于作往复移动或平面运动的构件,能否在构件本身将其惯性力平衡?4 机械的平衡包括哪两种方法?它们的目的各是什么?5 刚性转子的平衡设计包括哪两种设计?它们各需要满足的条件是什么?6 经过平衡设计后的刚性转子,在制造出来后是否还要进行平衡试验?为什么?7机械平衡的目的?8什么叫静平衡?9什么叫动平衡?10 动静平衡各需几个平衡基面?11刚性转子静平衡的力学条件是;动平衡的力学条件是。
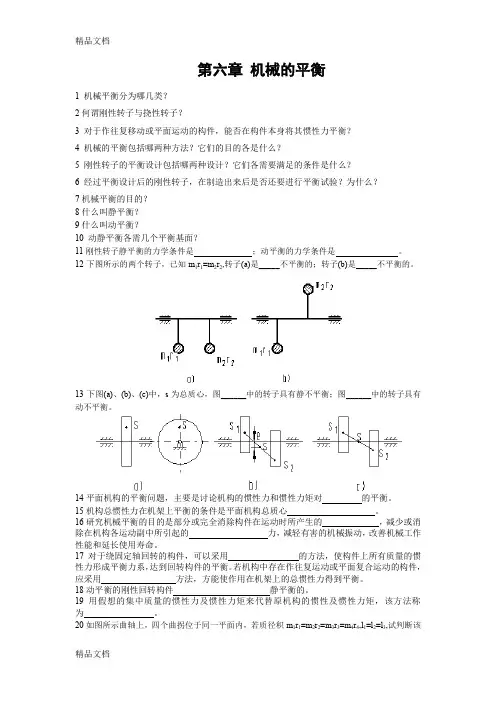
12下图所示的两个转子,已知m1r1=m2r2,转子(a)是_____不平衡的;转子(b)是_____不平衡的。
13下图(a)、(b)、(c)中,s为总质心,图______中的转子具有静不平衡;图______中的转子具有动不平衡。
14平面机构的平衡问题,主要是讨论机构的惯性力和惯性力矩对的平衡。
15机构总惯性力在机架上平衡的条件是平面机构总质心。
16研究机械平衡的目的是部分或完全消除构件在运动时所产生的,减少或消除在机构各运动副中所引起的力,减轻有害的机械振动,改善机械工作性能和延长使用寿命。
17对于绕固定轴回转的构件,可以采用的方法,使构件上所有质量的惯性力形成平衡力系,达到回转构件的平衡。
若机构中存在作往复运动或平面复合运动的构件,应采用方法,方能使作用在机架上的总惯性力得到平衡。
18动平衡的刚性回转构件静平衡的。
19用假想的集中质量的惯性力及惯性力矩来代替原机构的惯性及惯性力矩,该方法称为。
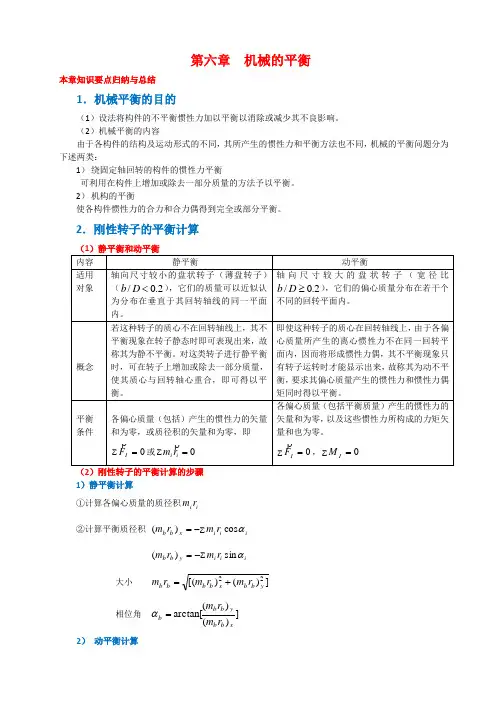
20如图所示曲轴上,四个曲拐位于同一平面内,若质径积m1r1=m2r2=m3r3=m4r4,l1=l2=l3,试判断该曲轴是否符合动平衡条件?为什么?21图示一盘形回转体,其上有四个不平衡质量,它们的大小及质心到回转轴线的距离分别为:m 110=kg ,214kg m =,316kg m =,420kg m =,1200mm r =,r 2400=mm ,3300mm r =,4140mm r =,欲使该回转体满足静平衡条件,试求需加平衡质径积m r b b 的大小和方位。
第六章 机械的平衡本章知识要点归纳与总结 1.机械平衡的目的(1)设法将构件的不平衡惯性力加以平衡以消除或减少其不良影响。
(2)机械平衡的内容由于各构件的结构及运动形式的不同,其所产生的惯性力和平衡方法也不同,机械的平衡问题分为下述两类:1) 绕固定轴回转的构件的惯性力平衡可利用在构件上增加或除去一部分质量的方法予以平衡。
2) 机构的平衡使各构件惯性力的合力和合力偶得到完全或部分平衡。
2.刚性转子的平衡计算(2)刚性转子的平衡计算的步骤 1)静平衡计算①计算各偏心质量的质径积i i r m②计算平衡质径积 i i i x b b r m r m αcos )(∑-= i i i y b b r m r m αs i n )(∑-= 大小 ])()[(22y b b x b b b b r m r m r m +=相位角 ])()(a r c t a n [xb b y b b b r m r m =α2) 动平衡计算①选定两个回转平面I 及II 作为平衡基面。
②将各离心惯性力分解到平衡基面I 和II 内。
③在平衡基面I 及II 内按静平衡计算方法各加一平衡质量bI m 及bII m ,使两平衡基面内的惯性力 之和分别为零。
3.刚性转子的平衡实验(1)静平衡实验目的是使转子的质心落在其回转中心上。
静平衡实验可借助于导轨式静平衡实验装置,反复增减 平衡质量以达到静平衡;也可借助于类似单摆的平衡设备,以迅速测出转子不平衡质径积的大小和方位。
(2)动平衡实验目的是使转子获得满意的动平衡。
动平衡实验借助于专用的动平衡机。
(3)现场平衡对于尺寸很大的转子,除在制造间进行平衡,还需在现场通过直接测量机器中转子支架的振动,来确定不平衡量的大小及方位,进而进行平衡。
4.转子的许用不平衡量有两种表示方法,即质径积[mr ] 表示法和偏心距[e ]表示法,两者的关系为 mmr e ][][=5.平面机构的平衡(1)机构平衡的条件:机构的总惯性力I F 和总惯性力偶矩IM分别为零,即0,0==II MF不过,在计算中,总惯性力偶矩对基座的影响应当与外加的驱动力矩和阻抗力矩一并研究,但是 由于驱动力矩和阻抗力矩与机械的工况有关,单独平衡惯性力矩往往没有意义,故这里只讨论总惯性力的平衡问题。
第6章习题6.1机械为什么会产生速度波动?它有何危害?答:实际上,机械原动件的运动规律是由其各构件的质量、转动惯量和作用于其上的驱动力与阻抗力等因素而决定的,因而在一般情况下,原动件的速度和加速度是随时间而变化,机械在运动过程中会出现速度波动。
这种速度波动,会导致在运动副中产生附加的动压力,并一起机械的振动,从而降低机械的寿命、效率和工作质量。
6.2周期性速度波动应如何调节?它能否调节为恒稳定运转?为什么?答:在机械中安装一个具有很大转动惯量的回转构件——飞轮来调节周期性速度波动。
飞轮能够调速,是利用了它的储能作用。
由于飞轮转动惯量不可能为无穷大,而平均转速和最大盈亏功又都是有限值,所以安装飞轮后机械运转的速度仍有周期波动,只是波动的幅度减小而已。
6.3为什么在机械中安装飞轮就可以调节周期性速度波动?通常都将飞轮安装在高速轴上是什么原因?答:由于飞轮具有很大的转动惯量,因而要使其转速发生变化,就需要较大的能量,当机械出现盈功时,飞轮的角速度只作微小上升,即可将多余的能量吸收储存起来;当机械出现亏功时,机械运转速度减慢,飞轮又可将其储存的能量释放,以弥补能量的不足,而其角速度只作小幅度的下降。
当最大盈亏功与速度不均匀系数相同时,飞轮转动惯量与其轴的转速的平方值成反比,所以为减少飞轮的转动惯量,最好将飞轮安装在机械的高速轴上。
6.4非周期性速度波动应如何调节?为什么利用飞轮不能调节非周期性速度波动?答:机械运转的速度出现非周期性的波动,若长时间内驱动力矩大于阻抗力矩,机械将越转越快,甚至可能出现“飞车”现象,从而使机械遭到破坏;反之,若驱动力矩小于阻抗力矩,则机械会越转越慢,最后将停止不动。
飞轮只能延缓机械遭到破坏或停止不动,不能使驱动力矩和阻抗力矩恢复平衡关系。
对非周期性的速度波动进行调节,方法必须可以使机械重新回复稳定运转。
主要采取的方法是安装调速器。
6.5在什么条件下需要进行转动构件的静平衡?使转动构件达到静平衡的条件是什么?答:对于轴向尺寸很小的回转件(D/b>5,圆盘直径为D,其宽度为b),其质量的分布可以近似地认为在同一回转面内。
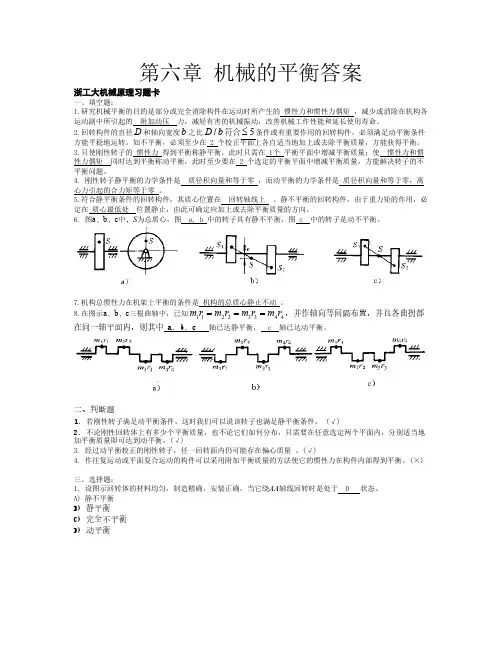
6. 图a、b、c中,S为总质心,图 a, b 中的转子具有静不平衡,图 c 中的转子是动不平衡。
7.机构总惯性力在机架上平衡的条件是机构的总质心静止不动。
在同一轴平面内,则其中 a, b, c 轴已达静平衡, c 轴已达动平衡。
2.图示为一圆柱凸轮。
设该凸轮的材料均匀,制造精确,安装正确,则当它绕D) 动平衡
3.
D) 动平衡
D) 惯性力部分平衡,但产生附加惯性力偶矩。
四、计算题
1. 图示两个回转构件是否符合静平衡条件?是否符合动平衡条件?为什么?442对a
b 3.图示为一鼓轮,上有重块b 将不平衡质量、分解至,平面内,因为位于平面内,不用分解,所以只需要A m B m I II A m I 分解B
m 2601200260()
I B B m m ⨯=⨯-∴723kg
.I B m =7232923kg ..II I B B B m m m =+=+=在平面内,I ∑
在平面II 内由得0i i m r =∑500600II II B b m m ⨯=⨯769kg .II b m ∴=方向如图所示。
4.某转子由两个互相错开的偏心轮组成,每一偏心轮的质量均为,偏心距均为,拟在平衡平090m r 面A 、B 上半径为处添加平衡质量,使其满足动平衡条件,试求平衡质量和的大小2r ()b A m ()b B m 和方向。
第六章 机械的平衡 本章知识要点归纳与总结 1.机械平衡的目的(1)设法将构件的不平衡惯性力加以平衡以消除或减少其不良影响。
(2)机械平衡的内容由于各构件的结构及运动形式的不同,其所产生的惯性力和平衡方法也不同,机械的平衡问题分为下述两类:1) 绕固定轴回转的构件的惯性力平衡可利用在构件上增加或除去一部分质量的方法予以平衡。
2) 机构的平衡使各构件惯性力的合力和合力偶得到完全或部分平衡。
2.刚性转子的平衡计算(1)静平衡和动平衡1)静平衡计算①计算各偏心质量的质径积i i r m②计算平衡质径积 i i i x b b r m r m αcos )(∑-= i i i y b b r m r m αsin )(∑-=大小 ])()[(22y b b x b b b b r m r m r m += 相位角 ])()(arctan[xb b y b b b r m r m =α2) 动平衡计算①选定两个回转平面I 及II 作为平衡基面。
②将各离心惯性力分解到平衡基面I 和II 内。
③在平衡基面I 及II 内按静平衡计算方法各加一平衡质量bI m 及bII m ,使两平衡基面内的惯性力之和分别为零。
3.刚性转子的平衡实验(1)静平衡实验目的是使转子的质心落在其回转中心上。
静平衡实验可借助于导轨式静平衡实验装置,反复增减平衡质量以达到静平衡;也可借助于类似单摆的平衡设备,以迅速测出转子不平衡质径积的大小和方位。
(2)动平衡实验目的是使转子获得满意的动平衡。
动平衡实验借助于专用的动平衡机。
(3)现场平衡对于尺寸很大的转子,除在制造间进行平衡,还需在现场通过直接测量机器中转子支架的振动,来确定不平衡量的大小及方位,进而进行平衡。
4.转子的许用不平衡量有两种表示方法,即质径积[mr ] 表示法和偏心距[e ]表示法,两者的关系为 mmr e ][][=5.平面机构的平衡(1)机构平衡的条件:机构的总惯性力I F 和总惯性力偶矩I M分别为零,即0,0==I I M F不过,在计算中,总惯性力偶矩对基座的影响应当与外加的驱动力矩和阻抗力矩一并研究,但是由于驱动力矩和阻抗力矩与机械的工况有关,单独平衡惯性力矩往往没有意义,故这里只讨论总惯性力的平衡问题。
第六章 机械的平衡本章知识要点归纳与总结1.机械平衡的目的(1)设法将构件的不平衡惯性力加以平衡以消除或减少其不良影响。
(2)机械平衡的内容由于各构件的结构及运动形式的不同,其所产生的惯性力和平衡方法也不同,机械的平衡问题分为下述两类:1) 绕固定轴回转的构件的惯性力平衡可利用在构件上增加或除去一部分质量的方法予以平衡。
2) 机构的平衡使各构件惯性力的合力和合力偶得到完全或部分平衡。
2.刚性转子的平衡计算(1)静平衡和动平衡1)静平衡计算①计算各偏心质量的质径积i i r m②计算平衡质径积 i i i x b b r m r m αcos )(∑-= i i i y b b r m r m αsin )(∑-=大小 ])()[(22y b b x b b b b r m r m r m += 相位角])()(arctan[xb b y b b b r m r m =α2) 动平衡计算①选定两个回转平面I 及II 作为平衡基面。
②将各离心惯性力分解到平衡基面I 和II 内。
③在平衡基面I 及II 内按静平衡计算方法各加一平衡质量bI m 及bII m ,使两平衡基面内的惯性力之和分别为零。
3.刚性转子的平衡实验(1)静平衡实验目的是使转子的质心落在其回转中心上。
静平衡实验可借助于导轨式静平衡实验装置,反复增减平衡质量以达到静平衡;也可借助于类似单摆的平衡设备,以迅速测出转子不平衡质径积的大小和方位。
(2)动平衡实验目的是使转子获得满意的动平衡。
动平衡实验借助于专用的动平衡机。
(3)现场平衡对于尺寸很大的转子,除在制造间进行平衡,还需在现场通过直接测量机器中转子支架的振动,来确定不平衡量的大小及方位,进而进行平衡。
4.转子的许用不平衡量有两种表示方法,即质径积[mr ] 表示法和偏心距[e ]表示法,两者的关系为 mmr e ][][=5.平面机构的平衡(1)机构平衡的条件:机构的总惯性力I F 和总惯性力偶矩I M分别为零,即0,0==I I M F不过,在计算中,总惯性力偶矩对基座的影响应当与外加的驱动力矩和阻抗力矩一并研究,但是由于驱动力矩和阻抗力矩与机械的工况有关,单独平衡惯性力矩往往没有意义,故这里只讨论总惯性力的平衡问题。
第6章作业6—1什么是静平衡?什么是动平衡?各至少需要几个平衡平面?静平衡、动平衡的力学条件各是什么?6—2动平衡的构件一定是静平衡的,反之亦然,对吗?为什么?在图示(a)(b)两根曲轴中,设各曲拐的偏心质径积均相等,且各曲拐均在同一轴平面上。
试说明两者各处于何种平衡状态?答:动平衡的构件一定是静平衡的,反之不一定。
因各偏心质量产生的合惯性力为零时,合惯性力偶不一定为零。
(a)图处于动平衡状态,(b)图处于静平衡状态。
6一3既然动平衡的构件一定是静平衡的,为什么一些制造精度不高的构件在作动平衡之前需先作静平衡?6—4为什么作往复运动的构件和作平面复合运动的构件不能在构件本身内获得平衡,而必须在基座上平衡?机构在基座上平衡的实质是什么?答由于机构中作往复运动的构件不论其质量如何分布,质心和加速度瞬心总是随着机械的运动周期各沿一条封闭曲线循环变化的,因此不可能在一个构件的内部通过调整其质量分布而达到平衡,但就整个机构而言.各构件产生的惯性力可合成为通过机构质心的的总惯性力和总惯性力偶矩,这个总惯性力和总惯性力偶矩全部由机座承受,所以必须在机座上平衡。
机构在基座上平衡的实质是平衡机构质心的总惯性力,同时平衡作用在基座上的总惯性力偶矩、驱动力矩和阻力矩。
6—5图示为一钢制圆盘,盘厚b=50 mm。
位置I处有一直径φ=50 inm的通孔,位置Ⅱ处有一质量m2=0.5 kg的重块。
为了使圆盘平衡,拟在圆盘上r=200 mm处制一通孔,试求此孔的直径与位置。
(钢的密度ρ=7.8 g/em3。
)解根据静平衡条件有:m1r I+m2rⅡ+m b r b=0m2rⅡ=0.5×20=10 kg.cmm1r1=ρ×(π/4) ×φ2×b×r1=7.8 ×10-3×(π/4)×52×5 ×l0=7.66 kg.cm取μW=4(kg.cm)/cm,作质径积矢量多边形如图所示,所添质量为:m b=μw w b/r=4×2.7/20=0.54 kg,θb=72º,可在相反方向挖一通孔其直径为:6—6图示为一风扇叶轮。
第六章机械的平衡1 机械平衡分为哪几类?2何谓刚性转子与挠性转子?3 对于作往复移动或平面运动的构件,能否在构件本身将其惯性力平衡?4 机械的平衡包括哪两种方法?它们的目的各是什么?5 刚性转子的平衡设计包括哪两种设计?它们各需要满足的条件是什么?6 经过平衡设计后的刚性转子,在制造出来后是否还要进行平衡试验?为什么?7机械平衡的目的?8什么叫静平衡?9什么叫动平衡?10 动静平衡各需几个平衡基面?11刚性转子静平衡的力学条件是;动平衡的力学条件是。
12下图所示的两个转子,已知m1r1=m2r2,转子(a)是_____不平衡的;转子(b)是_____不平衡的。
13下图(a)、(b)、(c)中,s为总质心,图______中的转子具有静不平衡;图______中的转子具有动不平衡。
14平面机构的平衡问题,主要是讨论机构的惯性力和惯性力矩对的平衡。
15机构总惯性力在机架上平衡的条件是平面机构总质心。
16研究机械平衡的目的是部分或完全消除构件在运动时所产生的,减少或消除在机构各运动副中所引起的力,减轻有害的机械振动,改善机械工作性能和延长使用寿命。
17对于绕固定轴回转的构件,可以采用的方法,使构件上所有质量的惯性力形成平衡力系,达到回转构件的平衡。
若机构中存在作往复运动或平面复合运动的构件,应采用方法,方能使作用在机架上的总惯性力得到平衡。
18动平衡的刚性回转构件静平衡的。
19用假想的集中质量的惯性力及惯性力矩来代替原机构的惯性及惯性力矩,该方法称为。
20如图所示曲轴上,四个曲拐位于同一平面内,若质径积m1r1=m2r2=m3r3=m4r4,l1=l2=l3,试判断该曲轴是否符合动平衡条件?为什么?21图示一盘形回转体,其上有四个不平衡质量,它们的大小及质心到回转轴线的距离分别为:m 110=kg ,214kg m =,316kg m =,420kg m =,1200mm r =,r 2400=mm ,3300mm r =,4140mm r =,欲使该回转体满足静平衡条件,试求需加平衡质径积m r b b 的大小和方位。
22 图示一钢质圆盘。
盘厚20mm δ=,在向径1100mm r =处有一直径50mm d =的通孔,向径2200mm r =处有一重量为2N 的重块,为使圆盘满足静平衡条件,拟在向径200mm r =的圆周上再钻一通孔,试求此通孔的直径和方位(钢的重度5106.7-⨯=γ3N/mm )。
23 一转子上有两个不平衡质量kg 2001=m ,kg 1002=m ,m m 501=r , 402=r mm ,选定平面Ⅰ、Ⅱ为平衡校正面,若两个平面内平衡质量的回转半径为mm 60bII bI ==r r ,求平衡质量bI m 、bII m 的大小及方位。
24 图示一双缸发动机的曲轴,两曲拐在同一平面内,相隔180︒,每一曲拐的质量为50 kg ,离轴线距离为200mm ,A 、B 两支承间距离为900mm ,工作转速n =3000r/min 。
试求:(1)支承A 、B 处的动反力大小;(2)欲使此曲轴符合动平衡条件,以两端的飞轮平面作为平衡平面,在回转半径为500mm 处应加平衡质量的大小和方向。
25 为了平衡曲柄滑块机构ABC 中滑块C 的往复惯性力,在原机构上附加一滑块机构ABC ',设曲柄和连杆的质量不计,滑块C 和C '质量都为m ,连杆长度l l BC BC =',试证明机构的第二级惯性力(即惯性力中具有曲柄转动频率两倍的频率分量)将获得完全平衡。
26 图示盘形回转件上存在三个偏置质量,已知m110= kg ,m 215= kg ,m 310= kg ,r 150= mm ,r 2100= mm ,r 370= mm ,设所有不平衡质量分布在同一回转平面内,问应在什么方位上加多大的平衡质径积才能达到平衡?27图示盘状转子上有两个不平衡质量:m115=.k g ,m 208=.kg ,r 1140= mm ,r 2180= mm ,相位如图。
现用去重法来平衡,求所需挖去的质量的大小和相位(设挖去质量处的半径r =140mm )。
28 高速水泵的凸轮轴系由三个互相错开120︒的偏心轮组成,每一偏心轮的质量为m ,其偏心距为r ,设在平衡平面A 和B 上各装一个平衡质量m A 和m B ,其回转半径为2r ,其他尺寸如图示。
试求m A 和m B 的大小和方向(可用图解法)。
29一回转体上有三质量:1 3 kg m =,2 1 kg m =,3 4 kg m =,绕z 轴等角速度旋转,160 mm r =,2140 mm r =,390 mm r =,其余尺寸如图示,试用图解法求应在平面Ⅰ和Ⅱ处各加多大平衡质量才能得到动平衡(设平衡质量bI m 和bII m 离转动轴线的距离bI r 、bII r 为bI bII 100 mm r r ==)。
30图示为V形发动机机构。
设每一活塞部件的质量都为m,今在曲柄延长线上与曲柄销B 对称的点D处加上一平衡质量m,则该发动机的所有第一级惯性力(即惯性力上具有与曲柄转动频率相同的频率分量)将被完全平衡。
试证明之(连杆、曲柄质量不计)。
提示:曲柄滑块机构中滑块的加速度变化规律为2cos cos2Nra rlωϕϕ⎛⎫≈-+⎪⎝⎭第六章 机械的平衡11刚性转子静平衡的力学条件是 不平衡惯性力的矢量和为零 ;动平衡的力学条件是 1)其惯性力的矢量和等于零,即∑P=0 ;(2)其惯性力矩的矢量和也等于零,即∑M=0 12子(a)是 静 不平衡的;转子(b)是 动 不平衡的。
13 a),b) 中的转子具有静不平衡;图 c) 中的转子具有动不平衡。
14 机座 15 静止不动 16 惯性力;动压17 静平衡或动平衡;完全平衡或部分平衡 18一定是 19 质量代换法20该曲轴符合动平衡条件21 m kg 22.01011⋅=⨯=r m (方向向上);m kg 6.54.01422⋅=⨯=r m (方向向右);m kg 8.43.01633⋅=⨯=r m (方向向下);m kg 8.214.02044⋅=⨯=r m (方向向左)。
m /m mkg 1.0⋅=mr μ0b b 44332211=++++r m r m r m r m r m ρρρρρ由图量得mkg 96.3b b ⋅=r m 方向量得与水平夹角即与44r m ρ夹角为45o。
或用计算法求得:2442221133)()(r m r m r m r m r m b b -+-=96.38.28.222=+=kg m ⋅ ︒=135b θ,与m r 22夹角22向径r 1处挖去通孔的质量kg3.08.9/4211=⨯⨯=γδπd m质径积m m kg 301003.011⋅=⨯=r m静平衡条件:0b b 2211=++-r m r m r m ρρρ 作矢量多边形,质径积m m kg 8.408.9/200222⋅=⨯=r m 得:m mkg 6.36b b ⋅=r m︒=82.74ϕ应在︒=18.255θ处去重,孔径为d b6.362008.9/42b b b =⨯⎪⎭⎫⎝⎛=δγπd r m6.15022b =d 76.38b =d mm23mm kg 5000502002 1 1⋅=⨯=''l lr mmm kg 5000502002"1"1⋅=⨯=l lr m mmkg 4000401002222⋅-=⨯-=''l l r m mmkg 80004010024"2"2⋅=⨯=l l r m m m kg 640020320 b b ⋅=⨯=''r mmm kg 940020470"b "b ⋅=⨯=r mkg 67.10660/6400bI ==m kg 67.15660/9400bII ==m方向θ¡'方向θ"24 (1) 不平衡质径积引发的离心力偶矩为m N 600000100060060230001000200502⋅=⨯⎪⎭⎫ ⎝⎛⨯⨯⨯π(2) A 、B 处附加动反力R 为6670006000009.0==⨯R R N(3) 为满足动平衡条件,在飞轮处应加平衡质量m b10 2.06.0505.02.1b b =⨯⨯=⨯⨯m m kg左端飞轮,平衡质量在下方。
右端飞轮,平衡质量在上方。
25 曲柄滑块机构中滑块的加速度变化规律为⎪⎭⎫⎝⎛+-≈ϕϕω2cos cos 2l r r a Nϕω=t ω---曲柄角速度由提示得滑块的第二级惯性力ϕω2cos 2I l rmr P =正号表示沿x 轴方向。
设曲柄AB 处在α角位置,活塞C 的第二级惯性力αω2cos 2I BCBABA C l ml P =方向为A 指向C 。
活塞的第二级惯性力()αω-=1802cos22I BC BA BA C l ml P =ml l BA BA BC 222ωα'cos方向为A 指向B 。
显然,活塞C 和系统的第二级惯性力获得完全平衡。
26 111050500 kg mm m r =⨯=⋅22151001500 kg mm m r =⨯=⋅ 331070700 kg mm m r =⨯=⋅1r 与3r 共线,可代数相加得图3311700500200 kg mm m r m r -=-=⋅方向同3r r平衡条件:b b1122330m r m r m r m r +++=r r r r 所以依次作矢量()331122,m r m r m r +r r r,封闭矢量b b m r r即所求,如图示。
b b 1513.275 kg mm m r ==⋅0200270arctg277.5951500θ=+=︒b b27 不平衡质径积 11210 kg mm m r =⋅22144 kg mm m r =⋅静平衡条件1122b b 0m r m r m r ++=r r r 解得b b 140 kg mm m r =⋅ 例6-2图 应加平衡质量b 140/140 1 kg m ==挖去的质量应在b b m r r矢量的反方向,140mm 处挖去1kg 质量。
28 偏心轮的不平衡质径积C C D D E E m r m r m r mr ===分别分解到平衡平面A 和B()5/4250/200mr mr r m A C C ==()5/250/50mr mr r m B C C ==()2/250/125mr mr r m A D D ==()2/250/125mr mr r m B D D ==()5/250/50mr mr r m A E E ==()5/4250/200mr mr r m BE E ==动平衡条件()()()()0b b =+++A E E A D D A C C A r m r m r m r m ρρρρ ()()()()0b b =+++BE E B D D B C C B r m r m r m r m ρρρρ解得:()2/b b mr r m A =因为 b 2r r =,所以()m m m A A 25.0b ==, ()2/b b mr r m B=因为r r b =2,所以()m m m B B 25.0b ==方向如图示。