Pix4UAV处理无人机数据操作流程
- 格式:docx
- 大小:8.94 MB
- 文档页数:16
Pix4D操作指南(测绘版)简介Pix4D是一款用于处理无人机获取的图像数据的软件,可以生成高精度测绘数据,用于建筑、农业、城市规划等领域。
本文介绍了Pix4D的基本操作步骤。
步骤1. 导入图像数据:Pix4D支持多种格式的图像,如JPG、TIFF和RAW格式。
在软件中选择“New Project”,然后选择图像数据的根目录,在“Image Properties”中设置图像相关参数。
2. 标注控制点:在“GCP/MTP Manager”中标注重要控制点,用于测量图像的尺度和精度。
可以手动标注或者导入地面控制点坐标。
3. 拍摄时间标定:在“Image Properties Editor”中标定每张图像的拍摄时间,用于在后续操作中对图像进行精准匹配。
4. 运行相机标定:在“Calibrate”选项卡中对相机进行标定,以获得相机内部参数和畸变矫正参数。
5. 运行图像匹配:在“Process”选项卡中运行图像匹配算法,用于将图像进行匹配、三维重建和贴合。
6. 生成测绘数据:在“Generate”选项卡中生成测绘数据,如DSM、DTM、DEM、点云等。
注意事项- 确保图像数据的质量和数量足够,以保证生成的测绘数据准确性。
- 在标注控制点时,最好选择明显且相互独立的地理特征点,以免产生误差。
- 标定相机时,建议使用至少10张以上的图像来提高标定的精度。
- 在软件运行过程中,建议关闭其他运行的程序,以保证计算机资源充足。
结论本文介绍了Pix4D的基本操作步骤和注意事项,希望可以帮助使用此软件进行测绘任务的人员顺利完成任务。
如需了解更多细节,请参考官方网站或用户手册。
四旋翼无人机调参流程英文回答:Step 1: Check the Hardware and Firmware.Start by inspecting the drone's components, including the motors, propellers, flight controller, and battery. Ensure all connections are secure and the firmware is up to date.Step 2: Calibrate the Sensors.Calibrating the sensors is crucial for accurate flight. Calibrate the accelerometer, gyroscope, and compass using the manufacturer's recommended procedures.Step 3: Set Flight Modes.Configure the flight modes based on the intended use of the drone. Common flight modes include Altitude Hold,Position Hold, and Return to Home.Step 4: Adjust PID Values.PID (Proportional-Integral-Derivative) values control the drone's response to inputs from the pilot. Experiment with different PID settings to optimize responsiveness, stability, and precision.Step 5: Calibrate the Transmitter.Calibrate the transmitter to ensure accurate control of the drone. Test the stick movements and adjust the trim settings for optimal flight characteristics.Step 6: Set Failsafe Parameters.Configure the failsafe parameters to specify thedrone's behavior in case of loss of control or connection. Set the appropriate actions, such as landing or returning to home.Step 7: Test and Refine.Test the drone in various flight conditions to assess its performance. Analyze the data and make adjustments to the parameters as needed to improve stability, responsiveness, and overall flight characteristics.中文回答:步骤 1,检查硬件和固件。
无人机航测数据处理流程
无人机航测数据处理流程主要分为以下几个步骤:
一、处理现场采集的数据:通过无人机航拍,采集现场信息,成
为数据集,如光影点云数据、三维模型等;
二、数据处理:将各种原始数据经过处理,切割成多个独立的栅
格或矢量数据,将空间数据和属性数据融合起来进行拼接;
三、数据分析:通过有效的统计方法,对数据进行解算,建立指
标体系,分析比较数据;
四、数据可视化:考虑展示需求,将三维模型等数据信息组合成
影像地图,把采集分析得到的数据在GIS绘图软件等进行可视化,能
够体现空间的对比性与综合性;
五、综合应用:将处理得到的可视图像与其他数据融合核查,得
出贴合当地特征的新找点数据,用于智能开发、决策分析等诸多应用。
无人机数据处理流程全面解析随着无人机技术的发展,无人机已成为许多行业中不可或缺的一部分。
然而,无人机拍摄的照片和视频,需要经过一系列的数据处理流程,才能得到高质量的成品。
在本文中,我们将全面解析无人机数据处理流程。
第一步:数据采集数据采集是整个数据处理流程中最重要的一步。
在进行数据采集前,需要规划好拍摄区域。
首先,确定所需的数据类型(如照片或视频),然后,为每个区域制定一个数据采集计划,并确定适当的飞行高度和方向。
之后,根据计划拍摄数据,并将其导出到计算机中进行后续处理。
第二步:数据组织和处理在数据采集完成后,需要对数据进行组织和处理。
这包括将照片或视频从无人机或存储卡中导入到计算机中,然后将其转换为标准的格式,以便后续的分析和处理。
此外,还需要对数据进行校验和清理。
首先,需要校验照片或视频是否完整。
如果数据不完整,需要重新采集。
其次,需要清除无用的数据,并对数据进行分类和序列化。
第三步:图像处理图像处理是无人机数据处理的核心部分。
在进行图像处理前,需要将图像预处理。
首先,对图像进行去噪处理,以增强图像质量。
其次,进行矫正,将图像转换为准确的地理坐标。
最后,对图像进行校正,以消除光线变化、摄像机摆动等影响因素。
在完成图像预处理后,进行图像分割和特征提取。
图像分割是将图像分解成各个组成部分的过程。
特征提取是从分割后的各个组成部分中提取有用的信息。
第四步:数据分析和应用数据分析和应用是无人机数据处理中的最后一步。
在进行数据分析前,需要根据具体应用场景和需求,确定合适的分析方法。
例如,如果是用于农业,可以进行作物生长分析和病害检测。
如果是用于地质探测,可以进行地质分析和矿产检测。
无论是哪种应用场景,都需要进行数据分析,以得出有用的结论和指导决策。
总结:无人机数据处理流程可以分为数据采集、数据组织和处理、图像处理和数据分析和应用四个步骤。
每个步骤都至关重要,缺陷任何一个环节都可能导致数据处理失败。
为了能够高效、准确地完成无人机数据处理,我们需要不断学习和更新数据处理技术,提高数据处理能力,将无人机技术应用于更广泛的领域。
无人机图像处理技术的使用教程无人机图像处理技术近年来得到了广泛的应用和发展。
它不仅能够提供高分辨率的图像,还可以通过图像处理算法进行目标检测、地物识别和智能分析等任务。
本文将为您介绍无人机图像处理技术的使用教程,帮助您了解如何利用无人机图像进行各种应用。
1. 确定任务需求在使用无人机图像处理技术之前,我们首先要明确自己的任务需求。
需要根据具体的应用场景,确定需要处理的图像类型,比如航拍图像、红外图像或者是多光谱图像等。
同时,我们还要明确目标检测、地物识别、智能分析等具体的任务内容。
2. 选取合适的无人机平台和设备根据任务需求,我们需要选取合适的无人机平台和设备。
无人机平台的选择要考虑飞行时间、稳定性、载荷能力等因素。
同时,还要选择合适的摄像头设备,确保能够获取高质量的图像数据。
3. 图像获取与处理无人机完成飞行任务后,我们需要将获取的图像数据进行存储和传输。
一般来说,我们可以选择将图像数据存储在无人机设备的内存卡中,或者通过数据传输模块将图像数据传输到地面站。
在获取到图像数据后,我们可以使用图像处理软件进行后续的图像处理。
常用的图像处理软件包括Photoshop、Matlab和OpenCV等。
4. 图像预处理在进行图像处理之前,我们需要对图像进行预处理,以提高处理效果。
常见的图像预处理操作包括图像去噪、图像增强、调整图像亮度和对比度等。
图像预处理的目的是使得图像更加适合后续任务的处理。
5. 目标检测目标检测是无人机图像处理技术中重要的任务之一。
通过目标检测,我们可以自动识别图像中的目标物体,并标记其位置和边界框。
常用的目标检测算法包括Haar特征、HOG(Histogram of Oriented Gradient)特征和深度学习算法。
根据具体的任务需求,选择合适的算法进行目标检测。
6. 地物识别地物识别是无人机图像处理技术的另一个重要任务。
通过地物识别,我们可以自动识别图像中的地物,比如建筑物、道路和植被等。
四旋翼无人机调参流程As an amateur operator of a quadcopter drone, I understand the significance of tuning the parameters to achieve optimal performance and stability. The process of parameter tuning can be daunting for beginners, but it is essential to optimize the flight characteristics of the drone. 调参是一个需要耗费时间和精力的过程,但是它能够帮助无人机飞行更为稳定并提高其性能。
The first step in the parameter tuning process is understanding the basics of drone flight dynamics. By learning about the various components of a quadcopter drone and how they interact with each other, operators can make more informed decisions when adjusting parameters. 了解无人机飞行动态的基础知识对于调参至关重要,只有深入了解四旋翼无人机的各个组成部分以及它们之间的相互作用,操作者才能更好地做出参数调整的决策。
Once the basics are clear, operators can begin the actual parameter tuning process by adjusting settings such as PID values, motor thrust, and flight controller settings. This trial-and-error process involves test flights and fine-tuning of parameters to achieve the desiredflight characteristics. 在对四旋翼无人机的基础知识有所了解之后,操作者可以开始实际的参数调整过程,包括调整PID值、电机推力和飞行控制器设置等。
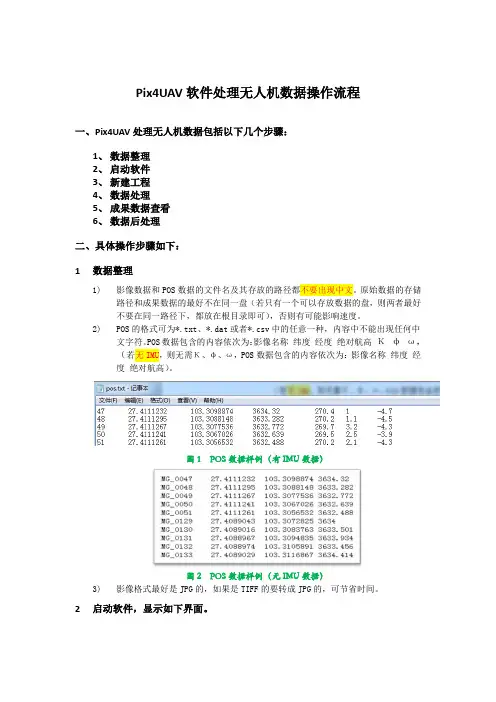
Pix4UAV软件处理无人机数据操作流程一、Pix4UAV处理无人机数据包括以下几个步骤:1、数据整理2、启动软件3、新建工程4、数据处理5、成果数据查看6、数据后处理二、具体操作步骤如下:1数据整理1)影像数据和POS数据的文件名及其存放的路径都不要出现中文。
原始数据的存储路径和成果数据的最好不在同一盘(若只有一个可以存放数据的盘,则两者最好不要在同一路径下,都放在根目录即可),否则有可能影响速度。
2)POS的格式可为*.txt、*.dat或者*.csv中的任意一种,内容中不能出现任何中文字符。
POS数据包含的内容依次为:影像名称纬度经度绝对航高Κφω,(若无IMU,则无需Κ、φ、ω,POS数据包含的内容依次为:影像名称纬度经度绝对航高)。
图1 POS数据样例(有IMU数据)图2 POS数据样例(无IMU数据)3)影像格式最好是JPG的,如果是TIFF的要转成JPG的,可节省时间。
2启动软件,显示如下界面。
3新建工程1)点击Project菜单,从列表中选择New Project。
2)弹出如下对话框,定义工程存放路径和工程名称。
点击Browse按钮,弹出如下对话框,定义工程存放的路径。
工程路径和工程名定义完成后,界面显示如下。
3)点击Next按钮,弹出加载影像数据的界面。
点击按钮,找到影像数据存放的路径并选中待处理的影像加载,加载数据完成后,显示界面如下。
4)点击next按钮,显示如下界面。
定义坐标系、相机参数,并导入POS数据。
①坐标系设定。
若默认的坐标系正确,则无需更改。
若不正确,则点击Images coordinate system选项卡中的按钮,弹出如下的定义坐标系界面。
可以通过点击来选择投影和坐标系;也可以通过导入通用的prj文件来定义坐标系。
②相机模型设定。
相机模型的核查、修改或自定义。
在Camera model选项卡中点击按钮。
显示如下界面。
点击Edit按钮可修改相机参数,修改完成后点击保存按钮;点击New按钮,定义新的相机模型,输入相机名称和相机参数,定义完成后点击保存按钮。
测绘技术中的无人机数据处理流程近年来,无人机技术的发展迅猛,不仅在民用领域有了广泛应用,而且在测绘技术中也起到了重要的作用。
无人机通过搭载各类传感器和相机,能够高效地获取地面影像、数字地形模型和点云数据等信息。
然而,仅仅收集到这些原始数据还不足以满足测绘的需求,必须经过一系列的数据处理流程才能得到最终结果。
首先,无人机在飞行过程中通过激光雷达或其他传感器获取到的点云数据需要进行预处理。
这一步主要包括数据去噪、滤波和配准等操作。
由于无人机在飞行过程中会受到风速、飞行高度差异等因素的影响,采集到的点云数据会存在一定的噪声。
因此,需要对数据进行去噪处理,消除异常点和误差。
而滤波就是对点云数据进行平滑处理,使得数据更加连续、规整。
配准则是将不同时间或不同位置采集到的点云数据进行对齐,确保数据的一致性和准确性。
接下来是点云数据的特征提取和分类。
通过对点云数据进行分类,可以将地面点和非地面点分开,进而提取出地形特征。
在这一步中,常用的方法有凸壳提取、基于聚类的点云分割等。
凸壳提取是通过计算点云数据中的点之间的凸包得到地面的边界,从而获取地面的形态特征。
而基于聚类的点云分割则是通过点云中的空洞聚类和区域聚类等方法提取出不同的地物信息。
然后是点云数据的配准和拼接。
由于无人机在采集过程中往往需要多次飞行,因此对于同一区域采集到的点云数据需要进行配准和拼接。
配准是将多个点云数据进行对齐,使得各个点云之间的位置和姿态保持一致。
拼接则是将多个对齐后的点云数据拼接成一个整体,形成连续的地形模型。
这一步通常需要进行特征匹配和姿态估计等操作,利用点云间的特征点进行匹配,进而推导出各个点云之间的相对位置和姿态关系。
接下来是地形模型的生成和质量评估。
经过前面的处理,我们得到了配准后的点云数据,但这还不足以满足实际应用的需求。
因此,需要将点云数据进一步处理成数字地形模型(DTM)或数字高程模型(DEM)。
这一步需要对点云数据进行栅格化,将连续的点云数据离散成规则的网格。
无人机摄影测量技术的操作流程与数据处理无人机摄影测量技术是近年来兴起的一项重要技术,它利用无人机搭载的摄影测量设备,通过航空摄影的方式获取地面或目标物体的图像信息,然后利用数据处理技术对图像进行处理和分析,实现测绘和测量等应用。
本文将介绍无人机摄影测量技术的操作流程与数据处理过程。
一、无人机摄影测量技术操作流程1. 航线规划与飞行准备在进行无人机摄影测量之前,首先需要进行航线规划和飞行准备。
航线规划包括确定拍摄区域、确定航线的起点和终点,以及确定无人机的飞行高度和航行速度等。
飞行准备包括检查无人机设备的状态和电量,确保无人机工作正常。
2. 飞行数据采集在无人机起飞后,开始进行飞行数据的采集工作。
通过无人机搭载的摄像头,对目标区域进行航空摄影,获取图像信息。
由于无人机的机动性强,可以在不同的角度和高度进行拍摄,从而获取到更多的图像信息。
3. 数据传输与处理飞行数据采集完毕后,需要将采集到的数据传输到计算机中进行处理。
一般情况下,无人机会将数据通过无线传输的方式发送到地面站。
地面站接收到数据后,可以进行数据的备份和筛选等操作,确保数据的完整性和质量。
二、无人机摄影测量技术数据处理1. 图像校正与配准在获取到的图像中,由于摄影过程中存在姿态变化、畸变等问题,所以需要进行图像的校正和配准。
图像校正主要是对图像进行去除畸变的操作,使得图像的几何特征更加真实可靠。
图像配准则是通过匹配同一区域的多张图像,将它们的特征点进行匹配,从而实现图像的统一。
2. 三维重建与模型生成在图像校正和配准之后,可以开始进行三维重建和模型生成的工作。
通过对多个相邻图像进行匹配和融合,可以恢复出地面或目标物体的三维表面模型。
通过模型生成技术,可以将图像转化为具有高度信息的三维模型,为后续的测量和分析提供基础。
3. 数据处理和分析模型生成之后,可以进行更进一步的数据处理和分析工作。
根据需要,可以对三维模型进行体积计算、距离测量、轮廓提取等操作,提取出所需的地理信息。
阐述无人机数据处理的基本流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!无人机数据处理的基本流程包括以下几个主要步骤:1. 数据采集:飞行任务规划:在进行无人机飞行之前,需要制定详细的飞行计划,包括飞行区域、高度、速度、拍摄角度等参数。
UAV测绘技术的基本原理与操作指南无人机(UAV)测绘技术的快速发展,正逐渐改变着传统测绘的方式。
不同于传统测绘的复杂手段和耗费大量人力物力的不足,UAV测绘技术以其高效、低成本、高精度的特点,成为测绘领域的新宠。
一、UAV测绘技术的基本原理UAV测绘技术的基本原理可概括为三个步骤:航迹规划、数据采集和数据处理。
首先是航迹规划。
根据实际需求,制定完善的飞行计划,并使用相关软件生成精确的航线。
航线要尽量覆盖测绘区域的每个角落,确保测量数据的全面性和准确性。
其次是数据采集。
选择合适的UAV设备,装载高精度摄像设备,通过无人机控制系统控制飞行,按照设计好的航线进行航拍。
在拍摄过程中,需要在合适的高度、角度和速度下对目标区域进行全方位拍摄,以保证所采集数据的真实性和可靠性。
最后是数据处理。
将采集的大量照片导入计算机,在相关软件的支持下进行图像配准、数据匹配、模型重建等一系列操作,得到准确的三维模型和地形图。
二、UAV测绘技术的操作指南1.选择合适的UAV设备。
根据测绘需求和预算,选择适合的无人机设备。
一般情况下,需要考虑续航能力、控制方式、载荷能力等因素。
2.准备必备的测绘设备。
除了无人机设备,还需要携带充足的电池、控制器、摄像设备、存储卡等,确保飞行过程中不会因为设备的不足而中断。
3.熟悉相关法规和规范。
在使用UAV进行测绘之前,需要了解并遵守国家相关的法规和规范,如低空飞行管理等,确保飞行的安全和合法性。
4.精心规划飞行航线。
针对需要测绘的区域,使用专业的软件设计飞行航线。
航线要尽量覆盖目标区域的每个角落,并考虑到风力、障碍物等因素。
5.进行飞行前的准备工作。
对无人机设备进行全面检查,确保各部件的正常运作。
检查电量、摄像设备的存储空间等,并确保软件的更新和校准。
6.合理控制飞行高度和速度。
在实际飞行过程中,需要根据目标区域的复杂程度和要求的精度,合理设置飞行高度和速度。
过高的飞行高度可能导致图像分辨率低,而过低的飞行高度则可能导致图像重叠度过高。
无人机遥感数据处理的流程与方法近年来,无人机技术的快速发展使得无人机遥感数据处理成为广泛关注的热门话题。
无人机遥感数据处理是指利用无人机搭载的传感器获取的数据,并通过一系列的处理方法进行数据分析与挖掘。
本文将介绍无人机遥感数据处理的一般流程与常用的方法,旨在为读者提供一些有关该领域的基本知识和参考。
一、无人机遥感数据处理的流程无人机遥感数据处理的流程一般包括数据采集、数据预处理、数据解译与应用。
以下将分别对这三个步骤进行详细介绍。
1. 数据采集数据采集是无人机遥感数据处理的首要步骤。
无人机搭载的传感器可以获取各种各样的数据,包括照片、视频、高光谱数据等。
这些数据可以提供丰富的信息,用于实现不同的应用目标。
在数据采集过程中,需要根据具体的需求设置无人机航线、传感器参数等。
2. 数据预处理数据预处理是为了确保无人机遥感数据的质量和可用性。
无人机航拍的数据通常会伴随一些噪声和不完整的信息,因此需要进行一系列的处理操作。
例如,可以通过图像校正技术对图像进行纠正,消除因无人机姿态和地形起伏引起的畸变。
3. 数据解译与应用数据解译与应用是无人机遥感数据处理的核心环节。
通过对数据进行解译和分析,可以得到系统的地理信息,如土壤含水量、植被覆盖度等。
这些信息可以应用于农业、环境监测、城市规划等领域。
在数据解译与应用过程中,需要借助一些专业软件和算法,如影像处理软件、地理信息系统等,以提高数据处理的效率和准确性。
二、无人机遥感数据处理的方法无人机遥感数据处理涉及到多个方法和技术,下面将介绍其中常用的几种方法。
1. 图像处理技术图像处理技术是无人机遥感数据处理的基础之一。
通过对图像进行增强、配准、分割等操作,可以提取出有用的信息。
例如,在农业领域中,可以通过图像处理技术提取出作物的生长状态、病虫害情况等。
2. 高光谱数据处理高光谱数据处理是无人机遥感数据处理中的重要环节。
通过对高光谱数据进行光谱分析和分类,可以获取物体的光谱特征和分布。
无人机摄影测绘的数据处理流程无人机的发展和应用使得摄影测绘领域发生了革命性的变化。
随着技术的不断进步,无人机摄影测绘已成为测绘行业中重要的工具与手段。
本文将介绍无人机摄影测绘的数据处理流程,从数据采集到数据处理的各个环节进行了详细的阐述。
一、数据采集无人机摄影测绘的第一步是数据采集,它是整个流程中最基础的环节。
数据采集包括选择无人机设备、调试设备、设置航线和拍摄参数等工作。
1. 选择无人机设备:根据具体的应用需求和场地环境,选择合适的无人机设备非常关键。
一般来说,需要考虑无人机的载荷能力、续航时间、稳定性等因素。
2. 调试设备:在进行数据采集之前,需要对无人机设备进行调试,确保其正常工作。
这包括检查设备的连接、校准传感器等工作。
3. 设置航线和拍摄参数:通过地理信息系统软件,根据需要进行航线规划,并设置拍摄参数,包括拍摄高度、拍摄间隔、图像格式等。
二、数据采集数据采集是无人机摄影测绘的核心环节,主要包括飞行控制、拍摄和记录原始数据等步骤。
1. 飞行控制:根据预设的航线,通过无人机的自动飞行控制系统控制无人机完成飞行任务。
这需要具备一定的飞行技术和操作经验。
2. 拍摄:在飞行过程中,无人机的载荷设备进行拍摄。
一般使用的载荷设备为相机,拍摄出高分辨率的图像。
3. 记录原始数据:在拍摄过程中,需要对位置、姿态和拍摄时刻等相关数据进行记录。
这些数据对后续的数据处理非常重要。
三、数据传输与存储数据采集完成后,需要将原始数据传输到数据处理的工作站,并进行存储。
1. 数据传输:通过无线通信技术,将原始数据从无人机传输到数据处理的工作站。
这可以通过Wi-Fi、蓝牙或数据线等方式实现。
2. 数据存储:将传输的原始数据存储在工作站的硬盘中,以备后续的数据处理工作。
四、数据处理数据处理是无人机摄影测绘的关键环节,它包括图像处理、数据配准、三维模型重建等多个步骤。
1. 图像处理:对原始图像进行预处理,包括去除噪点、调整亮度和对比度等。
简述无人机航测数据获取及数据处理的流程1. 引言1.1 概述随着无人机技术的快速发展,无人机航测数据获取与处理在各个领域得到了广泛应用。
无人机航测是指通过搭载相机或传感器的无人机来获取地面上有关物体、场景或环境特征的数据。
这些数据可以用于地质勘查、农业监测、城市规划等众多领域。
本文将详细介绍无人机航测数据获取及数据处理的流程。
首先,我们将描述无人机航测数据获取的准备工作,包括选择适当的设备和传感器、确定飞行计划以及确保飞行安全。
然后,我们将介绍飞行计划的执行过程,包括起飞、巡航和返航等步骤。
接下来,我们将探讨如何进行数据采集和传输,包括无人机与地面站之间的通信以及数据传输方式。
在理解了无人机航测数据获取流程之后,我们将深入研究无人机航测数据处理流程。
首先,我们会讨论数据预处理的重要性和方法,包括噪音去除、影像校正等步骤。
然后,我们将介绍图像配准与拼接的过程,来生成高分辨率的航测影像。
最后,我们将探讨数字地图生成与分析的方法,利用航测数据实现地理信息系统(GIS)等应用。
1.2 文章结构本文共分为五个部分。
首先是引言部分,概述了无人机航测数据获取及处理的背景和意义。
其次是无人机航测数据获取流程部分,详细介绍了准备工作、飞行计划与执行以及数据采集与传输的步骤。
第三部分是无人机航测数据处理流程部分,包括数据预处理、图像配准与拼接以及数字地图生成与分析的步骤。
第四部分将探讨无人机航测在农业、建筑规划和生态环境保护等领域中的应用。
最后一部分是结论及展望部分,对全文进行总结回顾,并展望了未来无人机航测数据获取与处理的发展方向。
1.3 目的本文旨在提供一个清晰明确的指南,帮助读者了解无人机航测数据获取及处理的流程。
通过阐述每个步骤的重要性和相关技术方法,读者将能够掌握无人机航测数据获取和处理的基本概念、工作流程以及应用领域。
同时,我们也希望通过展示无人机航测在农业、建筑规划和生态环境保护等方面的应用,引发读者对于无人机技术未来发展的思考。
pix4处理正射影像步骤正射影像处理是一种常见的地理信息系统(GIS)技术,用于获取、处理和分析地面上的影像数据。
下面将介绍处理正射影像的基本步骤。
1. 数据获取:首先需要获取正射影像数据,可以是航空摄影或卫星遥感获取的影像数据。
这些数据通常以栅格形式存储,包含地面上的各种特征和信息。
2. 影像预处理:在进行正射处理之前,需要对影像进行预处理,包括去除噪声、校正图像的几何和辐射特性等。
这一步骤可以提高影像的质量和准确性。
3. 地面控制点收集:为了进行准确的正射处理,需要收集地面控制点的坐标信息。
这些控制点通常是地面上的明显特征,如建筑物的角点、道路的交叉口等。
通过在影像上标记这些控制点,并测量其在地面上的坐标,可以建立影像和地面坐标之间的联系。
4. 影像配准:通过使用地面控制点的坐标信息,可以对影像进行配准,即将影像上的像素点与地面上的实际位置对应起来。
这一步骤可以消除影像的几何变形,使其具有真实的比例和形状。
5. 正射投影:在完成影像配准后,可以进行正射投影,将影像投影到一个平面上,使得地面上的所有像素点在投影平面上均匀分布。
这一步骤可以消除影像的透视效果,得到与地面上的实际位置一致的影像。
6. 地物提取和分析:经过正射处理的影像可以用于地物的提取和分析。
可以根据影像的像素值来提取不同类型的地物,如建筑物、植被等。
同时,可以通过分析影像的特征和属性,了解地物的分布、变化和关系,为地理研究和规划提供支持。
正射影像处理是一项重要的地理信息处理技术,通过一系列的步骤,可以将原始影像数据转化为具有几何和地理参考的影像产品。
这些产品可以广泛应用于地理研究、资源管理、城市规划等领域,为人们提供准确的地理信息和空间分析工具。
Pix4UAV软件处理无人机数据操作流程
一、Pix4UAV处理无人机数据包括以下几个步骤:
1、数据整理
2、启动软件
3、新建工程
4、数据处理
5、成果数据查看
6、数据后处理
二、具体操作步骤如下:
1数据整理
1)影像数据和POS数据的文件名及其存放的路径都不要出现中文。
原始数据的存储
路径和成果数据的最好不在同一盘(若只有一个可以存放数据的盘,则两者最好
不要在同一路径下,都放在根目录即可),否则有可能影响速度。
2)POS的格式可为*.txt、*.dat或者*.csv中的任意一种,内容中不能出现任何中
文字符。
POS数据包含的内容依次为:影像名称纬度经度绝对航高Κφω,
(若无IMU,则无需Κ、φ、ω,POS数据包含的内容依次为:影像名称纬度经
度绝对航高)。
图1 POS数据样例(有IMU数据)
图2 POS数据样例(无IMU数据)
3)影像格式最好是JPG的,如果是TIFF的要转成JPG的,可节省时间。
2启动软件,显示如下界面。
3新建工程
1)点击Project菜单,从列表中选择New Project。
2)弹出如下对话框,定义工程存放路径和工程名称。
点击Browse按钮,弹出如下对话框,定义工程存放的路径。
工程路径和工程名定义完成后,界面显示如下。
3)点击Next按钮,弹出加载影像数据的界面。
点击按钮,找到影像数据存放的路径并选中待处理的影像加载,加载数据完成后,显示界面如下。
4)点击next按钮,显示如下界面。
定义坐标系、相机参数,并导入POS数据。
①坐标系设定。
若默认的坐标系正确,则无需更改。
若不正确,则点击Images coordinate system选项卡中的按钮,弹出如下的定义坐标系界面。
可以通过点击来选择投影和坐标系;也可以通过导入通用的prj文件来定义坐标系。
②相机模型设定。
相机模型的核查、修改或自定义。
在Camera model选项卡中点击按钮。
显示如下界面。
点击Edit按钮可修改相机参数,修改完成后点击保存按钮;点击New按钮,定义新的相机模型,输入相机名称和相机参数,定义完成后点击保存按钮。
相机模型定义完成后,返回到如下界面。
③导入POS数据。
点击按钮,显示如下界面。
点击按钮,选择POS数据文件,完成后点击OK按钮。
界面如下。
5)点击Next按钮,显示如下界面。
6)点击按钮,新建工程过程完成。
4数据处理
1)在新建工程完成后,界面显示如下。
(在连外网的情况下,会显示底图和航迹图。
若无连外网,则只显示航迹图。
)
2)点击图标,显示界面如下。
3)先用Rapid模式来检查测区完整性和数据质量情况。
检查空三报告,如果空三结果较好,再使用Full模式进行处理;若空三出现问题,应检查数据情况,如(1)pos跟数据不对应,(2)原始质量问题:部分图像太暗或曝光过度,有黑边等情况;(3)拐角数据过多。
①选择Rapid单选按钮,将第二步和第三步的选中取消,显示如下。
②点击按钮,显示如下界面。
③在第一步完成后,变为绿色。
④点击图标,查看空三报告。
点击图标后,显示如下空三报告的PDF文档。
检查空三报告,如果空三结果较好,再使用Full模式进行处理;若空三出现问题,应检查数据情况,如ⅰ)pos跟数据不对应;ⅱ)原始质量问题:部分图像太暗或曝光过度,有黑边等情况;ⅲ)拐角数据过多。
4)在步骤3)完成后,再按如下方式进行设置,选中Full单选按钮,并选中第二步
和第三步的处理过程。
5)点击按钮,显示处理过程界面。
6)处理过程完成后,Local processing选项卡中的三个过程全部变为绿色。
5数据成果的查看
在处理过程完成后,找到工程保存的位置,打开以工程名命名的文件夹,再找到mosaic 文件夹打开,然后以图片浏览器打开文件名为“工程名_orthomosaic_geo_rgb.tif”(例如
)的DOM数据,查看结果是否满足要求,若拉花和错位的严重不满足要求,则进行第6步操作。
6数据后处理(镶嵌编辑)
以有拉花的房子为例来进行镶嵌编辑。
1)点击图标,弹出Scene editor界面。
2)将要编辑的房子在视窗中显示并单击,则包含此房子的镶嵌线变为棕黄色。
3)点击图标,然后在视窗界面点击,将有拉花的房子用多边形画出(注意:画出的
多边形必须与原有的镶嵌线边界有交叉; ctrl+z键可取消上一步操作)。
4)在新建的镶嵌线多边形上鼠标右击,显示如下界面。
5)点击Insert cell选项,则生成一新的镶嵌线。
选中新生成的镶嵌线,则可替代此区
域的单景影像显示在右边区域的列表中,如下图。
6)可通过Projection选项卡后的ortho和planar单选按钮进行真正射单景影像和平面
正射单景影像的的切换。
选中ortho或planar中的一个,然后从Available images 选项列表中选择满足要求的一景影像来替换有拉花的区域。
7)选中Blend mosaic按钮,界面如下显示。
8)从右栏中,点击Blend mosaic按钮,重新进行DOM的匀色镶嵌。
9)重新匀色镶嵌过程进行中。
10)匀色镶嵌过程完毕后会弹出如下对话框,点击OK完成。
11)用图片浏览器再次打开文件名为“工程名_orthomosaic_geo_rgb.tif”(例如
)的DOM数据,此时可看到原来有拉花的房屋被成功替换。