载人两轮平衡车的研究与制作
- 格式:pdf
- 大小:404.83 KB
- 文档页数:4
二轮平衡车机械结构一、引言二轮平衡车机械结构作为现代工程领域的一个重要研究方向,其设计与制造关系着平衡车的稳定性、安全性以及行驶性能。
本文将深入探讨二轮平衡车机械结构的原理、设计要点,并分析其在现实生活中的应用。
二、二轮平衡车原理简介二轮平衡车是一种基于陀螺效应的交通工具,它通过自动调整和控制前后轮的转速和转向角度,实现车身的平衡和前进。
为了实现平衡,二轮平衡车的机械结构需要具备以下要素:1. 传动系统:二轮平衡车通常配备电机,并通过传动系统将电能转化为动力,驱动车轮运动。
传动系统的设计要考虑到传动效率、扭矩输出以及可靠性等因素。
2. 车轮结构:车轮是二轮平衡车最基本的组件之一,它直接影响到车辆的平衡性和操控性。
车轮的设计需要考虑到干、湿等路面条件,并选择合适的轮胎材质和胎压,以提供良好的抓地力和操控性能。
3. 平衡控制系统:平衡控制系统是二轮平衡车的核心部件,它通过传感器,实时检测车辆的倾斜角度和加速度等信息,并通过电子控制单元(ECU)进行数据处理和控制。
平衡控制系统需要具备高精度和快速的响应能力,以实现车辆的平衡和前进。
三、二轮平衡车机械结构的设计要点为了确保二轮平衡车的稳定性和安全性,机械结构的设计需要考虑以下要点:1. 重心位置:重心位置对二轮平衡车的稳定性影响重大。
一般来说,将重心设置在车轮之上,可以减小车辆发生侧翻的概率,并提高车辆的平衡性。
2. 车轮轴距:车轮轴距是指车轮间的水平距离,它对车辆的稳定性和操控性有着重要影响。
较大的车轮轴距可以增加车辆的稳定性,但也会增加车辆的转弯半径和操控难度。
3. 轴承和悬挂系统:二轮平衡车的轴承和悬挂系统决定了车轮运动的平稳性和舒适性。
优质的轴承和悬挂系统可以减小车辆的震动和冲击力,提高车辆的行驶舒适性。
4. 刹车系统:刹车系统是保证车辆安全的重要组成部分。
二轮平衡车的刹车系统设计需要考虑到刹车力度的调节、稳定性和可靠性等因素,以保证车辆在急刹车时的安全性。
两轮智能平衡小车研究思路和方法两轮智能平衡小车是一种应用于机器人领域的新兴技术。
该车可以在不借助外力的情况下,保持平衡状态并完成各种运动任务。
本文将介绍两轮智能平衡小车研究的思路和方法。
一、研究思路两轮智能平衡小车的研究思路是将传感器、控制器和电机组成一个可控制的系统。
系统监测小车的姿态和运动状态,并调整车身的倾斜角度和转速,以保持平衡状态。
具体思路如下:1. 对小车的电路进行设计和搭建,包括底层硬件协议和数据传输协议。
2. 选择和安装传感器,包括加速度计和陀螺仪。
通过这些传感器来获取小车的姿态和运动状态的信息。
3. 设计小车的控制器,包括将传感器获取的数据转换成控制信号的代码。
4. 设计和调试小车的电机驱动程序,以保证控制信号能够按照设定的方式正确地操作电机,并实现车身的平衡控制。
5. 完成小车的充电和充电管理系统。
二、研究方法两轮智能平衡小车的研究方法主要可以分为以下几个阶段:1. 车载装置安装:选择合适的传感器并将其安装在小车上。
同时,需要在小车上安装电池和充电系统。
2. 传感器校准和参数优化:通过收集和分析传感器的数据,可以校准传感器的误差,并对传感器的参数进行优化,以提高控制精度。
3. 控制器设计:开发适用于平衡车的控制器,并对控制器进行验证。
在设计控制器时,需要将传感器输出的数据进行滤波处理,并设置控制参数,以实现正确的运动控制。
4. 电机驱动程序设计和测试:为小车设计驱动程序,使其能够实现平稳的平衡控制,并能够实现必要的运动步态。
同时,需要进行严格的测试和验证,以确保小车在运动时能够保持平衡。
5. 性能测试:通过对小车进行不同场景的测试,可以评估平衡车系统的性能。
测试时需要考虑不同的地形和环境条件,以评估平衡车的实际应用情况。
三、总结两轮智能平衡小车研究是一个复杂的系统工程,需要涉及机械结构、电子技术、传感技术、控制系统等多个领域。
在研究中需要充分利用各种工具和方法,规划研究方向和目标,设计测试方案和方法,以实现高效的研究和开发。
两轮独立驱动电动平衡车的设计摘要两轮电动平衡车是一种能够载人直立行走的交通工具,依靠电能提供动力。
它突破了传统意义上的车的概念,其特点是:两个车轮共轴放置,差动式运动,零半径转向,依照倒立摆的原理达到动态平衡。
近年来国内外的研究方向主要是两轮平衡机器人的控制系统,针对其机械结构的研究却较少,有关平衡车机械结构的文献更少。
本文总结了国内外相关领域的研究成果,在此基础上对平衡车的平衡原理进行了介绍,建立了平衡车的动力学模型,并对平衡车的机械结构进行了设计。
所做的具体工作如下:(1)先介绍平衡车姿态测量的传感器以及为减少传感器的测量误差所常用的方法。
然后对平衡所需的驱动力矩进行了推导,为后续的机械结构设计提供理论依据。
(2)设计平衡车的机械结构。
本文所设计的平衡车由车轮、悬架、车架和操纵杆四部分组成。
轮毂电机和减速器集成在车轮内部,提高了电动车的动力性能和工作效率。
操纵杆用来控制平衡车的转向和车速。
(3)对平衡车进行动力学分析,建立了平衡车的三维动力学模型。
模型建立过程中的大部分计算由数学软件Mathematica进行。
关键词 平衡车;驱动力矩;机械结构;动力学模型;AbstractTwo‐wheeled self‐balancing electric vehicle is a way to walk upright manned vehicles , rely on electricity to power. Self‐balancing vehicle breaking the concept of vehicle in the traditional sense, it is characterized by two wheels that in one line , differential movement , zero turning radius and in accordance with the principle of inverted pendulum dynamic equilibrium. In recent years, research at home and abroad are mainly on two balancing robot control system, studies of its mechanical structure has less literature ,studies on self‐balancing vehicle’s mechanical structure even less. This paper summarizes the research results in related fields, then the principle of balancing of the vehicle was introduced,a dynamic model of the vehicle was derived,and the mechanical structure of the vehicle was designed. Specific works are as follows:(1)Describing the self‐balancing vehicle attitude measurement sensor and a method to reduce the measurement error of the sensor common .Then the required drive torque has been derived to provide a theoretical basis for the subsequent mechanical design .(2) Mechanical design of the vehicle. The vehicle is designed in this paper combined by four parts, means wheels, suspensions, frame and lever. Wheels motor and reducer integrated in the wheels inside , improve dynamic performance and efficiency of the vehicle. Joystick to control the balance of the car 's steering and speed.(3) The self‐balancing vehicle dynamics analysis, three‐dimensional dynamic model of the balance of the vehicle was derived. Most of calculations in the modeling process done by the mathematical calculation software Mathematica.Keywords: Self‐balancing vehicle; Driving torque; Mechinics structure; Dynamic model目录第1章 绪论 (1)1.1 研究的目的及意义 (1)1.2 国内外研究现状 (2)1.2.1 国外研究现状 (2)1.2.2 国内研究现状 (3)1.3 论文主要内容 (4)第2章 平衡车的平衡原理 (6)2.1 简介 (6)2.2 平衡车的姿态测量和平衡控制 (7)2.2.1 平衡车的姿态测量 (7)2.2.2 平衡车的平衡控制 (10)2.3 平衡车行驶时所需的驱动力矩 (11)2.3.1 平衡车要克服的行驶阻力 (11)2.3.2 平衡车保持平衡所需的驱动力矩 (15)2.4 本章小结 (17)第3章 平衡车的机械结构设计 (18)3.1 平衡车总体方案 (18)3.2 车轮设计 (20)3.2.1 车轮结构方案设计 (20)3.2.2 车轮详细设计 (23)3.3 悬架设计 (34)3.4 车架和操纵杆设计 (36)3.5 平衡车各部件的装配 (38)3.6 本章小结 (38)第4章 平衡车的动力学模型 (40)第5章 总结 (48)致谢 (49)参考文献 (50)第1章 绪论1.1 研究的目的及意义随着我国工业水平的提高,近年来汽车产业迅速发展。
两轮自平衡小车的设计设计原理:两轮自平衡小车的设计原理基于倾角控制算法和正反馈控制理论。
当车身发生倾斜时,传感器将感知到倾角,并通过控制算法计算出合适的电机控制信号,使车身产生逆倾的力矩,从而使车身重新回到平衡状态。
当车辆向前倾斜时,电机会产生足够的力矩向前旋转,使小车向前加速,反之亦然。
通过不断监控和调整车体的倾角,小车能够保持平衡,并根据用户的指令进行前进、后退、转弯等动作。
硬件组成:1.IMU:IMU是最核心的传感器之一,通常由陀螺仪和加速度计组成。
陀螺仪用于测量车身的旋转角速度,加速度计则用于测量车身的倾角。
通过对陀螺仪和加速度计测量结果的融合,可以得到较为准确的车身姿态信息。
2.电机驱动器:电机驱动器用于控制电机的转速和方向。
它接收来自控制器的电机控制信号,并根据信号的大小和方向来调整电机的运转。
常见的电机驱动器有H桥驱动和PWM调速电路。
3.电机:两轮自平衡小车通常采用直流电机作为动力源。
电机的规格和功率根据车辆的大小和负载来确定。
一般情况下,电机的转速和扭矩越高,小车的稳定性和运动性能越好。
5.控制器:控制器是小车的主要计算和决策中心。
它接收来自IMU的姿态信息,通过算法计算出电机控制信号,并将信号传递给电机驱动器。
控制器通常采用单片机或微控制器作为基础,并配备相应的传感器接口、通信接口和控制算法。
软件控制:1.姿态控制算法:姿态控制算法通过对IMU传感器测量数据的处理,确定小车的倾角,并根据倾角的变化来计算电机的控制信号。
常见的姿态控制算法有PID控制器和卡尔曼滤波算法等。
2.运动控制算法:运动控制算法用于实现小车的前进、后退、转弯等动作。
它通过根据用户的指令调整电机的转速和方向,使小车按照预定的路径和速度运动。
常见的运动控制算法有速度控制和位置控制等。
3.用户界面:用户界面是与用户交互的界面,用于发送指令和接收反馈信息。
用户可以通过按钮、摇杆等设备来控制小车的运动,并通过显示屏、LED灯等设备来获取小车的工作状态。
平衡车关键技术研究与设计方法概述平衡车是一种以两个驱动轮为主体的电动车辆,通过动力系统和控制系统的协调工作,能够实现自身平稳行驶,并保持平衡状态。
平衡车在近年来得到了广泛应用,并成为城市短途交通工具的一部分。
本文将重点探讨平衡车的关键技术和设计方法,包括动力系统、控制系统和结构设计等方面。
一、动力系统1. 电机选择与布置平衡车的动力系统主要由电机组成。
在选择电机时,需要考虑功率、扭矩和效率等因素。
一般而言,较大功率的电机可以为平衡车提供更好的动力,但也会导致能耗增加。
扭矩的选择需要根据平衡车的负载情况进行合理匹配。
电机的布置对平衡车的稳定性和操控性有重要影响。
一种常见的布置方式是将两个电机分别安装在驱动轮两侧,这样可以提供更好的动力输出和操控性能。
另一种方式是将电机安装在车辆的中央部位,通过传动装置将动力传至驱动轮。
该方式可以减少车辆重心的变化,使得平衡控制更稳定。
2. 电池选择与管理平衡车的电池是其能量来源,因此电池的选择和管理至关重要。
市场上常见的电池类型有铅酸电池、镍氢电池和锂电池等。
锂电池由于其高能量密度和较低自放电率等特点,成为平衡车的主要选择。
在选择锂电池时,需要考虑容量、电压和充放电性能等因素。
电池管理系统(BMS)能够监测电池的状态、温度和电量等信息,并对充放电过程进行管理和控制,以提高电池的使用寿命和安全性。
BMS的设计需要考虑平衡车的功耗、工作条件和安全要求,同时还应具备通信接口和数据存储等功能。
二、控制系统1. 平衡控制算法平衡车的核心技术之一是平衡控制算法。
平衡控制算法通过传感器获取车辆的倾斜角度,再结合控制器的运算和输出,调节电机的转速和扭矩,从而使平衡车保持平衡状态。
常见的平衡控制算法包括PID控制、神经网络控制和模糊控制等。
PID控制是一种经典的控制方法,通过比例、积分和微分三个参数的调节,实现闭环控制。
神经网络控制借助于人工神经网络的模拟能力和学习能力,可以适应不同的工况和环境变化。
平衡车的制作方法“哎呀,这平衡车看起来好酷啊,要是我也能有一辆就好了!”我一脸羡慕地看着小区里的孩子骑着平衡车飞驰而过。
嘿,你还别说,被这平衡车勾起兴趣后,我还真就研究起了它的制作方法。
下面我就来给大家详细说说。
首先呢,得准备好各种材料和工具。
像车架、车轮、电机、电池、控制器这些是必不可少的,还有各种螺丝螺母啥的小零件。
工具嘛,螺丝刀、扳手这些常用的肯定得有。
制作步骤嘛,第一步就是组装车架啦。
把各个部件按照设计好的样子拼接起来,这可不能马虎,一定要拧紧螺丝,不然骑着骑着散架了可就悲剧了。
然后安装车轮,得确保安装牢固哦。
接着就是安装电机和电池啦,把它们和控制器连接好,这可是平衡车的核心部分呢。
这里可得注意啦,电线的连接一定要准确无误,不然可就没法正常工作啦。
还有电池的选择也很重要哦,要根据自己的需求选择合适容量的电池,不然跑不了多远就没电了,那多扫兴啊。
平衡车的优势那可多了去了。
它小巧灵活,可以在狭窄的地方自由穿梭,特别适合在小区里或者公园里玩。
而且操作简单,一学就会,就算是小孩子也能轻松驾驭。
我就记得有一次,我带着自己制作的平衡车去公园玩。
哇,那回头率,简直超高!好多小朋友都围过来,一脸好奇地看着我的平衡车,还问我这是怎么做的。
我那个得意啊,就给他们详细地介绍了起来。
看着他们那渴望的眼神,我心里别提多高兴了。
“嘿,你这平衡车自己做的啊,真厉害!”旁边的一个大叔忍不住夸赞道。
“哈哈,那是,我可是花了不少心思呢。
”我笑着回答。
在公园里骑着平衡车,感觉自己就像风一样自由,那种感觉真是太棒了。
而且平衡车还很环保,不会产生尾气污染,对环境也很友好呢。
总之呢,自己制作平衡车不仅有趣,还能让你收获满满的成就感。
如果你也对平衡车感兴趣,不妨自己动手试试吧!相信你一定会爱上这种感觉的!。
两轮自平衡小车的设计与实现一、本文概述随着科技的飞速发展,智能化、自主化已经成为现代机器人技术的重要发展方向。
两轮自平衡小车作为一种典型的动态稳定控制机器人,其设计与实现技术对于推动机器人技术的进步具有重要意义。
本文旨在深入探讨两轮自平衡小车的设计理念、实现方法以及关键技术,为相关领域的研究者和爱好者提供有益的参考。
本文将首先介绍两轮自平衡小车的基本概念和原理,阐述其动态稳定控制的基本思想。
随后,将详细介绍两轮自平衡小车的硬件设计,包括电机驱动、传感器选型、控制器设计等关键部分,并阐述各部件之间的协同工作原理。
在此基础上,本文将重点探讨两轮自平衡小车的软件实现,包括平衡控制算法、运动控制算法以及人机交互界面设计等。
本文还将对两轮自平衡小车的性能优化和实际应用进行深入分析,探讨如何提高其稳定性、响应速度以及续航能力等问题。
本文将对两轮自平衡小车的发展趋势和前景进行展望,为相关领域的研究和发展提供有益的参考。
通过本文的阐述,读者可以全面了解两轮自平衡小车的设计与实现过程,掌握其关键技术和应用方法,为推动机器人技术的发展做出贡献。
二、两轮自平衡小车的基本原理两轮自平衡小车,又称作双轮自稳车或双轮倒立摆,是一种基于动态稳定技术设计的个人交通工具。
其基本原理主要涉及到力学、控制理论以及传感器技术。
两轮自平衡小车的稳定性主要依赖于其独特的力学结构。
与传统三轮或四轮的设计不同,双轮自平衡小车只有两个支撑点,这意味着它必须通过动态调整自身姿态来维持稳定。
这种动态调整的过程类似于杂技演员走钢丝,需要精确的平衡和快速的反应。
实现自平衡的关键在于控制理论的应用。
两轮自平衡小车通常搭载有先进的控制系统,该系统通过传感器实时监测小车的姿态(如倾斜角度、加速度等),并根据这些信息计算出必要的调整量。
控制系统随后会向电机发送指令,调整小车的运动状态,以保持平衡。
传感器在两轮自平衡小车中扮演着至关重要的角色。
常见的传感器包括陀螺仪、加速度计和角度传感器等。
两轮平衡车研究内容
1.动力系统:研究电池容量、电机功率等参数对平衡车性能的影响,寻求更高效、更稳定的动力系统设计。
2.控制算法:研究平衡车的控制策略和算法,通过改进控制算法提高车辆的稳定性和操控性能。
3.传感器技术:研究平衡车的传感器技术,包括倾角传感器、加速度传感器等,提高平衡车控制精度和稳定性。
4.车身设计:研究车身结构和材料,改进车辆的抗震性和重量分布,提高平衡车的稳定性和舒适性。
5.人机交互设计:研究如何让驾驶员更容易地掌控平衡车,提高人机交互的可靠性和易用性。
6.给车辆增加通信系统,可以实现平衡车之间的通信,或者与智能手机连接,实现更好的用户体验和服务功能。
7.安全性设计:研究平衡车安全性的设计、制造和测试标准以及相关的技术和方法,以保证平衡车的质量和用户安全。
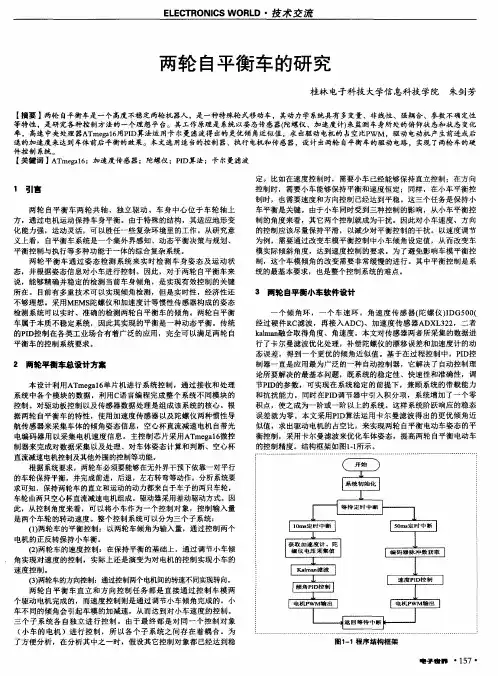
本科毕业设计题目两轮自平衡小车研究学院电子信息工程学院专业自动化学生姓名刘长根学号 200910311332 年级 2009级指导教师罗浚溢职称博士年月日两轮自平衡小车研究专业:自动化学号:200910311332学生:刘长根指导教师:罗浚溢摘要:现在两轮自平衡小车的研究在全世界得到很大的关注。
本论文主要工作是对两轮自平衡小车的原理进行研究并且和提出一种设计方案。
本次设计方案是采用ENC-03MB陀螺仪传感器和MMA7361LC 三轴加速度倾角传感器构成小车的状态检测装置,使用算法使陀螺仪数据和加速度计数据的融合得到小车的倾角,再通过一定的算法使小车保持直立状态。
系统采用飞思卡尔公司的DSC 16位处理器XS128单片机为核心控制处理器,完成传感器信号的处理,滤波算法的实现和车身控制等一些任务。
在小车制作完成后,各个模块之间能够正常并且协调的工作,小车可以只无人干预的条件下实现自主平衡,运用手机蓝牙可以控制小车的前进、后退、左右转动等各个动作。
关键词:两轮自平衡小车;陀螺仪;加速度倾角传感器;XS128单片机Research of The Two-wheel Self-balance Car Specialty:Automation Student Number:200910311332Student:Liu Changgen Supervisor:Luo JunyiAbstract:Now ,the research of two-wheel self-balance car get great attention all over the world.The main job of this paper is to study the principle of the two-wheel self-balance car and put forward a design scheme.This design used ENC-03MB gyroscope sensor and MMA7361LC triaxial acceleration and angle sensor constitute the car status detection ing algorithms made fusion of gyroscope data and accelerometer data to get the tilt angle of the car.Then ,through a certain algorithm to make the car keep upright.The system adopted freescale company DSC 16-bit processor XS128 single-chip microcomputer as the control core,it realized the sensor signal processing the sensor signal processing,filtering algorithm and body control and so on.After the car production is completed,each module can be normal and to coordinate work,the car can keep balancing in unmanned ing mobile phone Bluetooth can control the car forward,backward,turn right or left,and other actions.Key words:Two-wheel Self-balance Car ;Gyroscope;Angle Acceleration Sensor;XS128 Single Chip Microcomputer目录第1章绪论 (1)1.1 背景 (1)1.2 选题的目的和意义 (1)1.3两轮自平衡小车的国内外研究现状 (2)1.3.1 两轮自平衡小车在国外的研究现状 (2)1.3.2 两轮自平衡小车在国内的研究现状 (4)1.4 主要的研究内容 (5)第2章两轮自平衡小车的原理 (6)2.1 两轮自平衡小车直立运动分析 (6)2.2 小车的平衡控制 (6)2.3 小车的角度和角速度测量 (8)2.3.1 加速度传感器 (8)2.3.2 陀螺仪 (8)2.4 小车的速度控制 (9)第3章两轮自平衡小车的电路和程序设计 (10)3.1 两轮自平衡小车电路设计 (10)3.1.1 小车的整体电路框图 (10)3.1.2 单片机最小系统 (11)3.1.3 陀螺仪和加速度计传感器电路 (11)3.1.4 电机驱动电路 (12)3.1.5 电源模块电路 (13)3.2 两轮自平衡小车程序设计 (13)3.2.1 程序的功能和流程框架 (13)3.2.2 各个模块的程序 (15)第4章两轮自平衡小车的制作和调试 (33)4.1 小车的承载部分制作 (33)4.2 小车传感器的安装 (33)4.3 小车的调试 (34)4.3.1 小车调试条件 (34)4.3.2 小车调试 (34)4.3.3 参数调试 (35)第5章结论 (36)附录 (37)附录1 电路原理图 (37)附录2电路PCB图 (37)附录3 小车直立图片 (38)参考文献 (39)致谢 (40)第1章绪论1.1 背景近年来,随着移动机器人研究不断深入、应用领域更加广泛,所面临的环境和任务也越来越复杂。
两轮同轴自动平衡载人小车的开题报告一、研究背景随着现代城市交通的快速发展,人们日常出行的交通工具需求也不断提高,特别是对于小型的两轮载人车辆需求。
传统的人力自行车已经无法满足现代人的日常出行需要,因此,电动两轮车成为了一个非常受欢迎的选择。
然而,电动两轮车在行驶过程中存在悬挂性能差、转向不稳定、易倾倒等安全隐患,因此需要进行进一步的设计和研究。
本项目旨在设计一种两轮同轴自动平衡载人小车,能够解决传统两轮车存在的安全问题,提高行驶的舒适性和稳定性,满足现代城市出行的多样化需求。
二、研究内容本项目主要研究以下内容:1.两轮同轴自动平衡系统设计:通过传感器探测小车的倾斜角度,使用PID算法对小车进行自动平衡控制,保证小车稳定行驶。
2.小车悬挂系统设计:采用多轮悬挂系统,通过提高小车的行驶平稳性。
3.小车转向控制算法设计:让小车在转向时更加稳定,提高小车的安全性能。
4.小车整体框架的设计:设计出轮架、车架、车体等结构来保证小车的稳定性和可靠性。
三、研究方法1.理论分析法:通过借鉴和推广现有的电动自行车平衡控制技术和自动控制理论,深入探讨小车整体平衡控制的理论基础和控制算法。
2.仿真验证法:使用MATLAB等软件对平衡控制、车轮运动和悬挂系统等关键问题进行仿真分析,验证小车设计的可行性和有效性。
3.实验研究法:通过小车实验室等现代化实验设施,对小车的各项性能进行测试和评估,检验小车的设计是否稳定、可靠。
四、研究意义本项目通过设计出一种新型的两轮自动平衡载人小车,使得小车行驶更加稳定、舒适、安全性更高。
同时,研究的理论和控制算法可以应用到其他类型的智能载人工具中,提高其行驶的安全性和舒适度。
因此,该项目具有重大的社会和经济效益。
五、预期成果通过本项目的研究,预期实现如下成果:1.设计出能够自动平衡的两轮同轴载人小车。
2.提出贯彻可行的悬挂系统设计方案。
3.设计出小车转向控制算法,提高小车的安全性能。
4.将小车整体框架结构设计,确保小车的稳定性和可靠性。
两轮自平衡车的设计研究首先,两轮自平衡车的设计中最重要的组件是姿态感知器和控制系统。
姿态感知器通过加速度计和陀螺仪等传感器来感知车辆的姿态变化,并将数据传递给控制系统。
控制系统根据这些数据来计算出应该施加的力矩,以保持车辆的平衡。
我们需要精确地设计和调整这些组件,以确保车辆能够稳定地保持平衡。
其次,两轮自平衡车的动力系统也至关重要。
目前常用的动力系统是电池供电的电动机。
电动机将电能转化为机械能,驱动车辆前进。
设计动力系统时需要考虑能量效率、稳定性和驱动力的大小。
另外,选择合适的电池类型和容量也是关键,以确保车辆的续航能力。
此外,两轮自平衡车的操控系统也需要设计和研究。
一个简单直观的操控系统可以提高用户体验,并减少操作难度。
常见的操控系统包括使用身体重心移动来控制车辆的前进、后退和转向。
此外,也可以考虑添加智能化的操控功能,如蓝牙连接手机进行远程操控等。
在结构设计方面,两轮自平衡车需要考虑车辆的稳定性和可靠性。
一个好的结构设计能够提高车辆的抗风性和减震性能。
此外,车辆的重心位置也需要合理安排,以减小车辆倾倒的风险。
最后,两轮自平衡车的安全性是设计中不可忽视的因素。
设备应具备紧急停止和防护措施,以防止意外伤害。
例如,可以在车辆上加装限位开关,在发生故障时停止电机的运转。
另外,可以考虑添加LED灯和蜂鸣器等装置,以提高车辆的可见性和警示效果。
总之,两轮自平衡车的设计研究涉及姿态感知器和控制系统、动力系统、操控系统、结构设计和安全性等多个方面。
通过合理设计和研究,可以提高车辆的平衡性、稳定性和安全性,进一步推动两轮自平衡车的发展和广泛应用。
双轮平衡车的动力学分析与控制研究双轮平衡车作为一个新型的交通工具,主要是以平衡原理为基础,通过电动机驱动车轮前进,同时通过倾斜控制实现方向转动。
双轮平衡车的动力学分析与控制研究是一个非常新颖和有趣的研究领域,因为它涉及到了机器人控制、控制原理、传感器、电机控制等诸多学科领域,同时也涉及到了一些高级数学理论,如微积分、矩阵论等。
在本篇文章中,我将对双轮平衡车的动力学分析与控制研究进行探讨,以期能够对该研究领域有更深入的认识。
一、动力学分析动力学分析是双轮平衡车研究的基础,主要包括以下几个方面:1.车轮的转动学分析车轮的转动学分析是双轮平衡车的基础动力学分析之一。
车轮的运动方程一般采用增量式积分法求解,即把离散时间的时间步长变得很小,使得运动方程的积分误差很小。
在车轮的动力学分析中,还有一个重要概念,就是摩擦力。
通常来说,车轮与地面之间的摩擦力是动力学分析的一个重要参数。
掌握车轮的转动学分析,可以为后续的运动学、动力学分析打下良好的基础。
2.车身的运动学分析车身的运动学分析是双轮平衡车的另一个基础动力学分析。
这个分析主要是对车身的姿态、速度、加速度等进行分析和计算。
车身的运动学分析是双轮平衡车设计和控制的基础。
只有深入研究车身的运动学分析,才能更好地控制车身的摆动和平稳行驶。
3.倾斜控制系统的建立倾斜控制是双轮平衡车最核心的控制系统,其目的是通过倾斜车身来实现车辆的方向控制。
倾斜控制系统的建立主要涉及到感应器、传感器、控制器等很多方面。
其中,加速度传感器和陀螺仪是倾斜控制系统两个非常重要的传感器。
加速度传感器通过检测车身的倾斜角度,反馈给控制器,在控制器控制车辆的转向行驶。
陀螺仪则通过检测车辆的角速度,来判断车辆的方向和速度,提供重要的反馈信号给控制器。
二、控制系统设计倾斜控制系统的建立是双轮平衡车的核心,其目的是通过倾斜车身来实现车辆的方向控制。
倾斜控制系统的建立主要涉及到感应器、传感器、控制器等很多方面。
两轮平衡车的设计两轮平衡车是一种电动交通工具,具有非常好的操控性和平衡性。
它被广泛应用于短途出行、城市交通等方面。
一个好的设计和工艺不仅能提高车辆的性能,还能增加驾驶者的安全性。
在下面的文章中,将介绍两轮平衡车的设计及其主要部件。
首先,两轮平衡车的主要部件包括车身、电机、电池、控制器和传感器。
车身是整个平衡车的框架,必须具有足够的强度和刚度以支撑驾驶者和其他部件。
车身通常由高强度材料制成,如铝合金或碳纤维复合材料。
这些材料具有轻量化和高强度的特点,可以减少车身的重量,增加驾驶的灵活性。
电池是平衡车的能量储存装置,可以提供电机所需的电能。
目前市场上主要有铅酸电池、镍氢电池和锂电池等多种类型的电池。
铅酸电池价格低廉,但体积大、重量重。
镍氢电池体积小,容量大,使用寿命长。
锂电池不仅容量大,而且体积小,重量轻,适合平衡车的应用。
平衡车的电池容量也应根据车辆的需求进行选择,以确保车辆的行驶里程。
控制器是平衡车的核心部件,它包含了车辆的控制算法和电机驱动电路。
控制器通过读取传感器的数据,实时计算车辆的姿态和加速度等信息,并根据设定的控制策略来控制电机的工作。
控制器不仅要保证车辆的平衡,还要具有过载保护、过压保护、过流保护等功能,以确保车辆的安全性和稳定性。
传感器是平衡车的感知器官,通过感知车辆的姿态、加速度、角度等信息,并将这些信息传递给控制器。
常用的传感器有陀螺仪、加速度计、角度传感器等。
陀螺仪可以感知车辆的旋转角速度,加速度计可以感知车辆的加速度,角度传感器可以感知车辆的倾斜角度。
通过这些传感器的合理组合和数据处理,可以实现车辆的平衡和操控。
除了上述主要部件之外,两轮平衡车还可以配备照明灯、喇叭、液晶显示屏等附加设备,以提高驾驶者的安全性和便利性。
照明灯可以增加车辆的可见性,喇叭可以提醒行人和其他车辆,液晶显示屏可以显示车辆的速度、电量和故障信息等。
这些设备的设计应考虑到车辆的美观性和人机交互性,以便驾驶者能够方便地获取相关信息。
两轮平衡车设计心得
两轮平衡车是一种新型的交通工具,能够通过重心的转移实现前进、后退、左右转向等操作。
在设计过程中,需要考虑到用户的使用需求和安全性。
首先,设计师需要确定车辆的结构形式。
目前市面上常见的两种形式是翘板式和竖直式。
翘板式两轮平衡车结构相对简单,但是需要用户具备一定的平衡能力,操作起来相对困难;竖直式两轮平衡车结构相对复杂,但是可以通过陀螺仪等技术保持车身平衡,操作起来相对容易。
其次,设计师需要考虑车辆的稳定性。
车身重心需要合理布局,重心过高容易导致车辆失去平衡;轮子的直径和宽度也需要合理确定,过小容易造成不稳定,过大则会增加车辆的重量和摩擦力。
另外,设计师还需要考虑车辆的安全性。
两轮平衡车需要配备安全带、头盔等保护装备,防止发生意外事故;车辆还需要配备紧急制动装置,以应对紧急情况。
最后,设计师还需要考虑车辆的外观设计。
外观设计需要符合人机工程学原理,舒适美观,易于操控和操作,符合人们的审美需求。
总之,两轮平衡车的设计需要全面考虑各个方面,以提供给用户一个安全、舒适、易于操作的交通工具。
- 1 -。