航位推算法在导航定位中的仿真研究
- 格式:pdf
- 大小:709.85 KB
- 文档页数:22

航位推算在导航定位中的应用摘要:只限于GPS 导航往往会有盲点,DR 导航的自主性恰能弥补GPS 导航的不足。
本文阐述了在得到一组GPS 导航数据的基础上如何利用航位推算进行导航。
通过卡尔曼滤波对航向角数据进行处理,比较滤波前后载体的运动轨迹,分析产生误差的主要原因。
结果表明:matlab 仿真出的载体运动轨迹与实验时的罗盘方向轨迹相同,利用卡尔曼滤波能够有效减小误差。
1 引言DR 导航时一种自主式导航,成本相对GPS 较低,在短时间内能够提供比较精确的导航参数,抗干扰能力强,隐蔽性好。
但是误差随导航时间积累是DR 导航的致命缺点,因此DR 导航不适合长时间的单独导航。
GPS 导航精度高、功能强、使用方便,但在应用于车辆导航时,当车辆在树荫下、涵洞、隧道里、深山峡谷内,特别在城市里行驶时,高楼大厦会挡住卫星的信号,使卫星导航接收机不能正常接收卫星信号,不能正常定位[1]。
由此可见,将两种导航方式结合起来共同完成导航功能是提高导航精度的一个主要手段,具有重大意义。
卡尔曼滤波在导航方面有很重要的作用,最传统的导航融合是集中式Kalman 滤波,现在应用比较广泛的是自适应扩展卡尔曼滤波,利用系统预测量、系统状态噪声量、观测量与观测噪声几个量实现滤波,在信息融合中,利用信息分配原理,自适应调整GPS 和DR 观测量在滤波中的权重。
自适应滤波根据自适应因子作用范围不同分为单因子自适应滤波和多因子自适应滤波[2]。
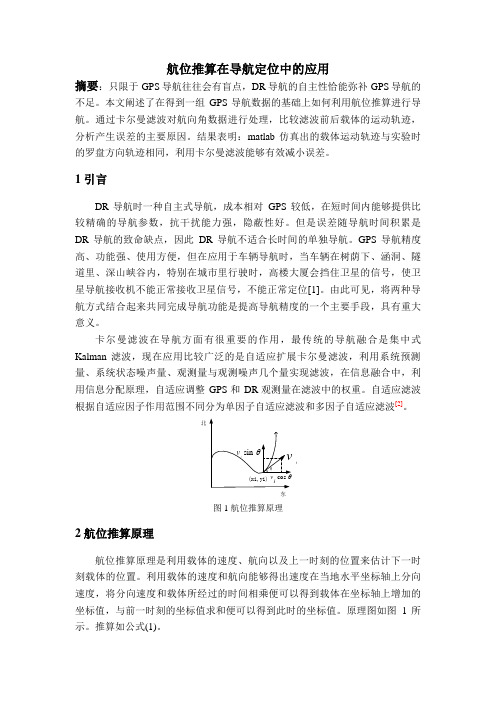
东北i图1 航位推算原理 2 航位推算原理航位推算原理是利用载体的速度、航向以及上一时刻的位置来估计下一时刻载体的位置。
利用载体的速度和航向能够得出速度在当地水平坐标轴上分向速度,将分向速度和载体所经过的时间相乘便可以得到载体在坐标轴上增加的坐标值,与前一时刻的坐标值求和便可以得到此时的坐标值。
原理图如图1所示。
推算如公式(1)。
错误!未找到引用源。
(1)其中,(错误!未找到引用源。
)为载体在错误!未找到引用源。

飞行器导航系统仿真与优化研究在航空航天领域中,导航系统是至关重要的一个部分,尤其是对于飞行器而言。
在整个飞行过程中,导航系统能够为飞行员提供准确的位置信息,以确保航班的安全。
因此,导航系统的可靠性和准确性被认为是一项非常重要的考虑因素。
在当前技术水平下,仿真和优化技术已经成为了研究导航系统开发和设计的必要手段。
一、飞行器导航系统的基础飞行器导航系统是指通过各种方式获取飞行器的位置信息,以中心化地记录和分析,以保证飞行器在飞行中的位置和航向的准确性。
通俗的来说,导航系统就像是一个电子地图,它可以向飞行员提供当前的位置、航向等关键信息,并通过多种方式帮助飞行员进行巡航。
飞行器导航系统通常是由各种电子设备、传感器和计算机来完成的,例如惯性导航仪、卫星导航系统、自动定位系统等,它们可以根据不同的飞行环境和任务要求,提供适当的导航定位信息,以确保飞行器的安全和有效的操作。
二、飞行器导航系统的仿真技术飞行器导航系统的仿真技术是指通过计算机软件或硬件设备来模拟和测试导航系统的运行状态和性能,并以此为基础来做出决策和优化其性能。
这一技术的主要优点在于:通过仿真,可以在不浪费大量时间和金钱的情况下测试导航系统的性能,并确定和优化其设计。
在实践中,为了更好地进行导航系统的仿真和测试,研究人员通常会使用各种MATLAB/Simulink等仿真和建模工具。
这些工具拥有丰富的仿真库,可以对导航系统的各种算法进行快速测试和优化。
此外,研究人员还可以基于各种仿真和优化技术,开发出相应的导航系统模拟软件或仿真环境,以更好地理解导航系统的运行状态和性能。
三、飞行器导航系统优化技术基于上述仿真技术可以对导航系统进行测试和优化。
导航系统的优化技术是指通过模拟和数据分析,以提高其精度、稳定性和可靠性。
这一技术通常还涉及到机器学习和人工智能手段,以提高导航系统的自适应性和智能化程度。
其基本优点为:通过对导航系统的优化,以有效提高其性能和精度,从而减少了导航误差和位置漂移等问题的出现,为飞行员带来更大的安全和可靠性。

海洋测绘技术中的船舶定位与航位推算航海是人类探索海洋的历史悠久的活动,而船舶定位与航位推算则是航海中至关重要的技术。
在现代海洋测绘中,船舶定位与航位推算技术的发展不仅提升了航海的安全性,也为海洋资源开发和海岸线管理等领域提供了可靠的数据。
船舶定位是航海过程中最基本的要求之一。
在没有定位技术的时代,水手们只能依靠天文观测和地标来判断船舶的位置,这无疑是一项困难且容易出错的任务。
幸运的是,随着科技的发展,现代航海定位技术的出现彻底改变了这一局面。
目前,船舶定位主要依赖全球定位系统(GPS)和惯性导航系统(INS)。
GPS系统通过一组卫星来提供船舶的经纬度和海拔信息,使船舶可以在全球范围内进行定位。
INS系统则是利用加速度计和陀螺仪等传感器来测量船舶的加速度和角速度,从而推算出船舶的位置。
这两个系统的结合为船舶定位提供了高精度和实时性。
然而,航海中的船舶定位并不仅仅是指船舶在地理坐标上的位置,还包括船舶在海洋环境中的航向和航速。
船舶的航向可以通过航向传感器和自动舵控系统获得,而航速则需要利用航速测量装置来获取。
这些数据对于船舶行驶的控制和航海安全至关重要。
航位推算是船舶定位的补充和扩展,通过分析船舶的运动状态来推断船舶未来的位置。
常用的航位推算方法包括航向推算和速度推算。
航向推算主要依赖船舶的航向和航速,并结合水流和风力等因素进行计算。
速度推算则是利用船舶的航速和行驶时间,推算出船舶在未来一段时间内的位置。
这两种推算方法的结合,可以为船舶提供高精度的位移预测,有助于船舶进行航线规划和导航。
然而,船舶定位与航位推算技术在实际应用中仍然面临一些挑战和难题。
首先,海洋环境的复杂性导致定位精度存在一定的误差。
例如,水下地形、水流和气候等因素都会对定位数据产生影响,需要通过数据处理和校正来提高定位的准确性。
其次,高海流和恶劣的天气条件也会对航位推算造成困扰。
在这种情况下,需要依靠其他辅助手段如雷达和声纳等来补充定位数据,提高航位推算的可靠性。
北斗导航系统定位算法仿真研究一、概述随着科技的快速发展,卫星导航系统已经成为现代社会不可或缺的重要技术支撑。
北斗导航系统作为我国自主研发的全球卫星导航系统,在军事、民用等多个领域都发挥着关键作用。
北斗导航系统的定位算法作为实现精准定位的核心技术,其性能优劣直接影响到整个系统的定位精度和稳定性。
对北斗导航系统定位算法进行深入研究与仿真分析,对于提升系统性能、优化定位效果具有重要意义。
本文旨在通过对北斗导航系统定位算法进行仿真研究,深入剖析其工作原理、性能特点以及影响因素。
我们将介绍北斗导航系统的基本组成、工作原理以及定位算法的基本原理。
我们将建立北斗导航系统定位算法的仿真模型,包括信号传播模型、接收机模型、误差模型等,以便对算法性能进行定量评估。
我们将通过仿真实验,分析不同场景下定位算法的性能表现,探讨影响定位精度的主要因素,并提出相应的优化策略。
通过本文的研究,我们期望能够为北斗导航系统定位算法的优化提供理论支持和实践指导,推动北斗导航系统在实际应用中的性能提升和拓展。
本文的研究成果也将为其他卫星导航系统的定位算法研究提供一定的参考和借鉴价值。
1. 北斗导航系统概述北斗卫星导航系统(Beidou Navigation Satellite System,简称BDS),作为中国自行研制的全球卫星导航系统,是中国着眼于国家安全和经济社会发展需要,自主建设运行的时空基础设施。
它旨在为全球用户提供全天候、全天时、高精度的定位、导航和授时服务。
北斗系统由空间段、地面段和用户段三部分组成,其服务范围覆盖全球,具有高精度、高可靠性,并具备短报文通信能力。
北斗导航系统的发展经历了北斗一号、北斗二号和北斗三号三个阶段。
北斗一号系统于2000年年底建成,开始向中国提供服务北斗二号系统于2012年年底建成,服务范围扩展至亚太地区而北斗三号系统则于2020年建成,实现了向全球提供服务的目标。
随着全球组网的成功,北斗卫星导航系统的国际应用空间将会不断扩展,为全球科技、经济和社会发展做出贡献。
航位推算算法航位推算算法是一种用于导航和定位的算法,它可以通过收集天文数据来确定当前位置和方向。
具体来说,航位推算算法通过测量星体的角度和方向以及航空器的运动状态来确定其在三维空间中的位置和方向,这是一种非常精确的导航方法,特别适用于长距离飞行和航海。
下面是使用航位推算算法进行导航的步骤:1. 收集数据首先,需要测量天文学数据,包括恒星,行星和月亮等天体的位置和角度。
还需要确定航空器的运动状态,包括速度,方向和加速度等信息。
这些数据将作为航位推算算法的输入。
2. 计算预测值使用测量到的数据和航空器的运动状态,通过航位推算算法计算出预测值,包括航空器在三维空间中的位置和方向。
这些预测值将用于比较和校准后续的测量结果。
3. 测量数据使用天文望远镜和其他天文学设备,在不同的时间和位置测量恒星,行星和月亮等天体的位置和角度。
此步骤的目的是校准预测值并提供更准确的数据。
4. 校准预测值将测量结果与预测值进行比较,根据偏差调整预测值,以获得更准确的位置和方向信息。
5. 重新计算位置和方向使用校准后的数据,重新计算航空器在三维空间中的当前位置和方向,用于导航和定位。
航位推算算法的优点是精确和可靠,即使在没有GPS和其他定位设备的情况下,也可以提供准确的导航信息。
这种算法被广泛应用于航空和航海领域,也被用于研究太空探测器的导航。
总之,航位推算算法是一种重要的导航和定位算法,它以恒星,行星和月亮等天体作为参照物,利用测量数据和预测值来确定航空器在三维空间中的位置和方向。
虽然这个算法需要更多的天文学知识和测量技能,但它是一种稳定可靠的非GPS导航方法,可以帮助人们在没有地面信标或其他定位设备的情况下进行准确的导航。
卫星导航定位系统中用户机概略坐标算法及仿真朱喜明 王存良(中国电子科技集团公司第27研究所 河南郑州 450005)摘 要 介绍卫星导航定位系统中用户机概略坐标的算法,包括用户机同时观测到4颗星和3颗星两种情况,并分别对其进行仿真计算。
多次仿真结果表明,在条件相同情况下,观测到4颗星时的用户机概略位置与用户机实际位置的误差,小于观测到3颗星时相应误差的1/3~1/16,并分析了减小这种误差的原因;从用户机同时观测到3颗星的概略坐标计算结果,说明了仅观测到3颗星不能用于空间运动目标定位的原因。
关键词 卫星导航定位系统;用户机;概略位置;仿真计算An Algorithm for User Receiver Outline Coordinatesin Satellite Positioning System and SimulationZ HU Xi ming WANG Cun liang(Researc h Ins titute No.27,China Elec tronics Technol ogy Corporati on,P.O.Box:1027,Zhengzhou,Henan Province 450005)Abstract This paper describes the algorith m for user receiver ou tline coordinates in satellite positioning systems.It includes two instances for user receivers to observe four and three satellites at the same time.Si mulation is carried out for the two in stances.Repeated simulation results show that the error when observing four satellites is 1/3~1/16smaller than observing three satellites.Reason for the error difference i s analyzed.Based on computation resul ts on ou tline coordinates when the user receiver observes three satellites at the same time,observing only three satellites cannot be used in posi tioning of moving targets in space.Key words Satelli te Positioning System;User Receiver;Outline Coordinates;Simulation1 引 言卫星导航定位主要用伪距测量,由于用户接收机时钟与导航系统基准钟的钟差是一个变量,所以要进行三维定位至少需建立4个观测方程。
航位推算在导航定位中的应用
航位推算(Dead Reckoning)是一种基于船舶或飞机已知起点、航向和速度来推算其
所在位置的一种导航技术。
它不像卫星导航系统那样,依赖于信号接收设备,而是通过测
量速度和方向来估算目标的位置。
航位推算最初被用于船舶导航,后来随着飞机的出现,也被广泛应用在航空导航中。
它的原理非常简单,以航空导航为例,飞机起飞后,经过一段时间后,飞机的速度和方向
可以通过飞行仪表得到。
通过计算这段时间内飞机飞行的距离和方向,可以计算出飞机飞
行路径上的所有位置。
然后,将这些位置绘制在导航地图上,就可以确定飞机的位置了。
航位推算在船舶导航中也是同样的原理。
在船舶上,通过测量速度和方向,可以计算
出船舶在海上的位置。
船舶上的导航仪器可以测量船速、朝向和航向。
通过这些信息,可
以计算出船舶在海上航行的轨迹,并确定船舶的位置。
然而,航位推算在实际应用中也存在一些缺点。
首先,由于船舶或飞机在航行过程中,受到外界环境的影响,如气流、潮流、风力等,这些因素会影响船舶或飞机的速度和方向,从而影响航位推算的准确性。
其次,由于航位推算的计算是通过累计误差来计算的,因此
每次计算的误差都会累积,导致位置误差不断增加。
因此,在实际应用中,航位推算通常
需要与其他导航技术结合使用,以提高导航的精度和准确性。
总的来说,航位推算虽然是一种传统的导航技术,但在一些特定场合仍然具有重要的
应用价值。
它不仅可以作为补充卫星导航系统的一种备用技术,同时也作为船舶和飞机在
没有卫星信号定位的情况下确定自身位置的基本方法。