PELCO产品协议解析
- 格式:doc
- 大小:51.50 KB
- 文档页数:2

PELCO协议协议名称:PELCO协议一、引言本协议旨在规范PELCO协议的标准格式,确保各方在使用PELCO协议时能够准确理解和遵守相关规定。
二、定义1. PELCO协议:指由PELCO公司开发的一种用于视频监控设备之间通信的协议。
2. 发送方:指发送PELCO协议命令的设备或系统。
3. 接收方:指接收并执行PELCO协议命令的设备或系统。
三、通信协议1. 数据格式:PELCO协议使用二进制格式进行通信。
2. 命令结构:PELCO协议命令由固定长度的字段组成,包括起始码、地址码、命令码、数据1、数据2和校验码。
a) 起始码:占用1个字节,用于标识命令的开始。
b) 地址码:占用1个字节,用于指定接收方的地址。
c) 命令码:占用1个字节,用于指定具体的命令类型。
d) 数据1和数据2:占用各1个字节,用于传输附加数据。
e) 校验码:占用1个字节,用于验证命令的正确性。
3. 命令类型:PELCO协议定义了一系列命令类型,包括镜头控制、云台控制、预置位设置等。
具体命令类型详见PELCO协议文档。
四、命令规范1. 镜头控制命令:用于控制摄像头的焦距、光圈等参数。
a) 命令码:0x00至0x03。
b) 数据1:用于指定具体的操作,如焦距调整、光圈调整等。
c) 数据2:用于传输附加数据,如焦距变化的步长。
2. 云台控制命令:用于控制摄像头的云台运动。
a) 命令码:0x04至0x07。
b) 数据1:用于指定具体的操作,如云台转动、云台停止等。
c) 数据2:用于传输附加数据,如云台转动的速度。
3. 预置位设置命令:用于设置和调用预置位。
a) 命令码:0x08至0x0B。
b) 数据1:用于指定具体的操作,如设置预置位、调用预置位等。
c) 数据2:用于传输附加数据,如预置位的编号。
4. 其他命令:PELCO协议还定义了其他类型的命令,如亮度调整、对比度调整等。
具体命令类型详见PELCO协议文档。
五、通信流程1. 发送方向接收方发送PELCO协议命令。

控制协议1、通令参数:标准速率为4800bps,无校验, 8位数据位,1位停止位2、命令串格式:一个PTZ控制命令为7字节的十六进制代码,格式如下:同步字节为$FF。
地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word 6的检验和(CheckSum)校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]Command 1 and Command 2 如下:注:云台自动由Command 1的Bit 7和Bit 4控制:为$90时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FHData2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word3到Word6全为0。
B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例一、云台动作命令上:(按下)FF 01 00 08 00 2F 38 (弹起)FF 01 00 00 00 00 01 2号上:(按下)FF 02 00 08 00 2F 39 (弹起)FF 02 00 00 00 00 02 下:(按下)FF 01 00 10 00 2F 40 (弹起)FF 01 00 00 00 00 01 左:(按下)FF 01 00 04 2F 00 34 (弹起)FF 01 00 00 00 00 01 右:(按下)FF 01 00 02 2F 00 32 (弹起)FF 01 00 00 00 00 01 自动:(开)FF 01 90 00 00 00 91 (关) FF 01 00 00 00 00 01 二、镜头控制命令光圈:开(按下)FF 01 02 00 00 00 03 (弹起)FF 01 00 00 00 00 01 关(按下)FF 01 04 00 00 00 05 (弹起)FF 01 00 00 00 00 01 变倍:小(按下)FF 01 00 20 00 00 21 (弹起)FF 01 00 00 00 00 01 大(按下)FF 01 00 40 00 00 41 (弹起)FF 01 00 00 00 00 01 聚焦:近(按下)FF 01 01 00 00 00 02 (弹起)FF 01 00 00 00 00 01 远(按下)FF 01 00 80 00 00 81 (弹起)FF 01 00 00 00 00 01 三、辅助继电器控制命令AU×1:(断开)FF 01 00 0B 00 01 0D (闭合)FF 01 00 09 00 01 0B AU×2:(断开)FF 01 00 0B 00 02 0E (闭合)FF 01 00 09 00 02 0C AU×3:(断开)FF 01 00 0B 00 03 0F (闭合)FF 01 00 09 00 03 0D AU×4:(断开)FF 01 00 0B 00 04 10 (闭合)FF 01 00 09 00 04 0E 说明:1、云台上下左右及镜头控制按钮弹起时必须发出停止命令。
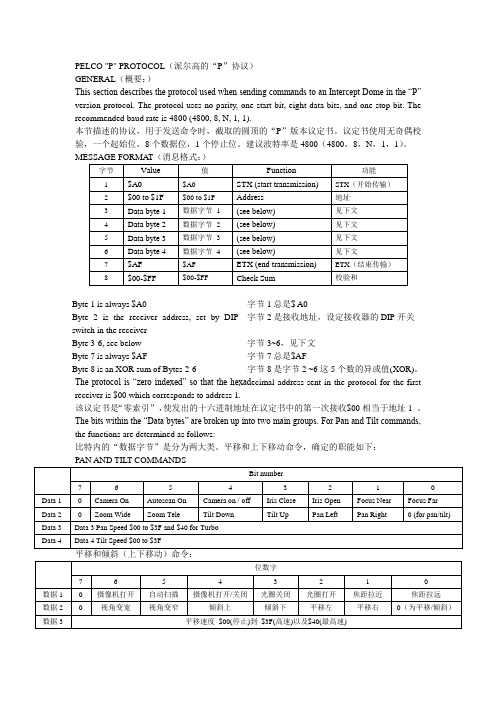
PELCO "P" PROTOCOL(派尔高的“P”协议)GENERAL(概要:)This section describes the protocol used when sending commands to an Intercept Dome in the “P” version protocol. The protocol uses no parity, one start bit, eight data bits, and one stop bit. The recommended baud rate is 4800 (4800, 8, N, 1, 1).本节描述的协议,用于发送命令时,截取的圆顶的“P”版本议定书。
议定书使用无奇偶校验,一个起始位,8个数据位,1个停止位。
建议波特率是4800(4800,8,N,1,1)。
Byte 1 is always $A0 字节1总是$ A0Byte 2 is the receiver address, set by DIP字节2是接收地址,设定接收器的DIP开关switch in the receiverByte 3-6, see below 字节3~6,见下文Byte 7 is always $AF 字节7总是$AFByte 8 is an XOR sum of Bytes 2-6 字节8是字节2 ~6这5个数的异或值(XOR)。
The protocol is “zero indexed” so that the hexad ecimal address sent in the protocol for the first receiver is $00 which corresponds to address 1.该议定书是“零索引”,使发出的十六进制地址在议定书中的第一次接收$00相当于地址1 。
The bits within the “Data bytes” are broken up into two main groups. For Pan and Tilt commands, the functions are determined as follows:比特内的“数据字节”是分为两大类。

PELCO协议一、背景PELCO协议是一种用于视频监控设备之间通信的标准协议。
它由PELCO公司开发,旨在提供一种统一的通信方式,使不同厂商生产的视频监控设备能够互相兼容和交互操作。
该协议已经成为视频监控行业中最为广泛使用的协议之一,被许多厂商和行业组织所采用。
二、目的本协议的目的是规范PELCO协议的标准格式,确保各厂商生产的视频监控设备之间能够正确地进行通信和交互操作。
通过统一的协议标准,可以提高视频监控设备的互操作性和兼容性,为用户提供更加便捷和高效的视频监控解决方案。
三、协议内容1. 协议版本PELCO协议的当前版本为V1.0。
2. 数据格式PELCO协议使用二进制数据格式进行通信。
数据包由起始字节、命令码、数据长度、数据内容和校验码组成。
起始字节:协议数据包的起始标识,固定为0xFF。
命令码:用于标识不同的命令操作,占据一个字节。
数据长度:用于标识数据内容的长度,占据一个字节。
数据内容:根据不同的命令操作而变化,占据长度不定的字节。
校验码:用于校验数据包的完整性,占据一个字节。
3. 命令操作PELCO协议定义了一系列的命令操作,用于控制和管理视频监控设备的功能。
以下是一些常用的命令操作:- 云台控制命令:用于控制云台的运动,包括上下左右移动、变焦、变倍等。
- 镜头控制命令:用于控制镜头的调节,包括焦距、光圈、聚焦等。
- 预置点命令:用于设置和调用预置点,可以将云台和镜头的位置和参数保存为预置点,方便快速定位。
- 巡航路径命令:用于设置和执行巡航路径,可以按照预先设定的路径自动巡航。
- 报警命令:用于处理设备的报警信息,包括接收和发送报警信号。
4. 数据传输PELCO协议使用串口进行数据传输,支持RS-232和RS-485等接口。
数据传输速率可根据实际需求进行设置,通常为9600bps。
5. 错误处理在数据传输和命令操作过程中,可能会出现错误情况。
PELCO协议定义了一套错误处理机制,包括错误码和错误回应。

PELCO-D与PELCO-P协议区别PELCO-D与PELCO-P协议区别曼码协议是AD品牌的协议,通用性很好,派尔高P、D协议是派而高自己的协议,所以用矩阵控制快球,要考虑协议的问题,大部分矩阵厂家都提供协议转换器,而且大多数快球厂家也把解码器内内置多种协议,基本没有匹配问题,都是485的控制协议。
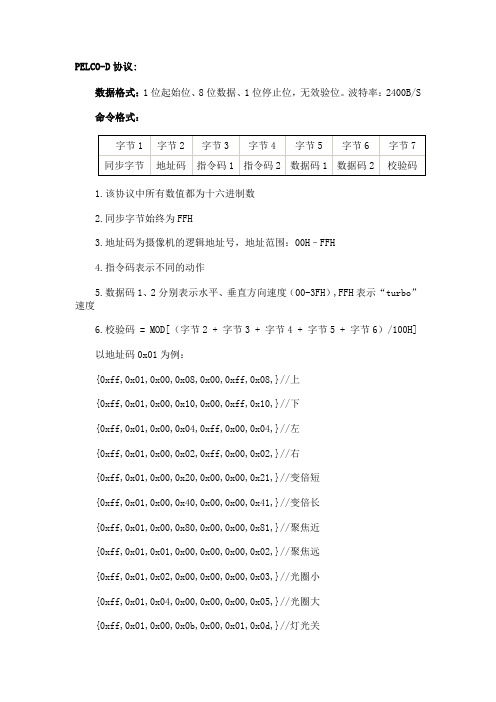
PELCO-D:数据格式:1位起始位、8位数据、1位停止位,无效验位。
波特率:2400B/S 命令格式:1.该协议中所有数值都为十六进制数2.同步字节始终为FFH3.地址码为摄像机的逻辑地址号,地址范围:00H–FFH4.指令码表示不同的动作5.数据码1、2分别表示水平、垂直方向速度(00-3FH),FFH表示“turbo”速度6.校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]以地址码0x01为例:{0xff,0x01,0x00,0x08,0x00,0xff,0x08,}//上{0xff,0x01,0x00,0x10,0x00,0xff,0x10,}//下{0xff,0x01,0x00,0x04,0xff,0x00,0x04,}//左{0xff,0x01,0x00,0x02,0xff,0x00,0x02,}//右{0xff,0x01,0x00,0x20,0x00,0x00,0x21,}//变倍短{0xff,0x01,0x00,0x40,0x00,0x00,0x41,}//变倍长{0xff,0x01,0x00,0x80,0x00,0x00,0x81,}//聚焦近{0xff,0x01,0x01,0x00,0x00,0x00,0x02,}//聚焦远{0xff,0x01,0x02,0x00,0x00,0x00,0x03,}//光圈小{0xff,0x01,0x04,0x00,0x00,0x00,0x05,}//光圈大{0xff,0x01,0x00,0x0b,0x00,0x01,0x0d,}//灯光关{0xff,0x01,0x00,0x09,0x00,0x01,0x0b,}//灯光开{0xff,0x01,0x00,0x07,0x00,0x01,0x09,}//转至预置点001{0xff,0x01,0x00,0x03,0x00,0x01,0x05,}//设置预置点001{0xff,0x01,0x00,0x05,0x00,0x01,0x07,}//删除预置点001以上对应的停命令均是:{0xff,0x01,0x00,0x00,0x00,0x00,0x01,}//停命令PELCO-P:数据格式:1位起始位、8位数据、1位停止位,无效验位。
控制协议1、通令参数:标准速率为4800bps,无校验, 8位数据位,1位停止位2、命令串格式:一个PTZ控制命令为7字节的十六进制代码,格式如下:地址字节为受控制的PG解码器的十六进制地址,从1开始编号校验字节为Word2到Word 6的检验和(CheckSum)校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]注:云台自动由Command 1的Bit 7和Bit 4控制:为$90时云台自动开。
Data1(Word5)数据码1控制水平方向速度00-3FHData2(Word6)数据码2控制垂直方向速度00-3FH。
注:停止命令停止当前云台及镜头的动作,其Word3到Word6全为0。
辅助继电器开关命令也为7字节长度,其Word 1、Word2、Word 7同上,控制线连接方式:A 485+B 485-TX+ 485+TX- 485-解码器控制代码示例若非特意注明,控制1号解码器为例一、云台动作命令上:(按下)FF 01 00 08 00 2F 38 (弹起)FF 01 00 00 00 00 01 2号上:(按下)FF 02 00 08 00 2F 39 (弹起)FF 02 00 00 00 00 02 下:(按下)FF 01 00 10 00 2F 40 (弹起)FF 01 00 00 00 00 01 左:(按下)FF 01 00 04 2F 00 34 (弹起)FF 01 00 00 00 00 01 右:(按下)FF 01 00 02 2F 00 32 (弹起)FF 01 00 00 00 00 01 自动:(开)FF 01 90 00 00 00 91 (关) FF 01 00 00 00 00 01二、镜头控制命令光圈:开(按下)FF 01 02 00 00 00 03 (弹起)FF 01 00 00 00 00 01 关(按下)FF 01 04 00 00 00 05 (弹起)FF 01 00 00 00 00 01 变倍:小(按下)FF 01 00 20 00 00 21 (弹起)FF 01 00 00 00 00 01 大(按下)FF 01 00 40 00 00 41 (弹起)FF 01 00 00 00 00 01 聚焦:近(按下)FF 01 01 00 00 00 02 (弹起)FF 01 00 00 00 00 01 远(按下)FF 01 00 80 00 00 81 (弹起)FF 01 00 00 00 00 01三、辅助继电器控制命令AU×1:(断开)FF 01 00 0B 00 01 0D (闭合)FF 01 00 09 00 01 0B AU×2:(断开)FF 01 00 0B 00 02 0E (闭合)FF 01 00 09 00 02 0C AU×3:(断开)FF 01 00 0B 00 03 0F (闭合)FF 01 00 09 00 03 0D AU×4:(断开)FF 01 00 0B 00 04 10 (闭合)FF 01 00 09 00 04 0E说明:1、云台上下左右及镜头控制按钮弹起时必须发出停止命令。
PELCO (派尔高)协议解析在IBMS 接口开发中,我们需要用到一些常用的协议,而 PELCO (派尔高)的监控器材在我国有很广泛的应用。
PELCO 有自己的传输控制协议,当它的产品配套使用时,可以互相兼容。
但在某些情况下,由于工程的需要,要求用其它设备 (比如电脑)来控制PELCO 的矩阵或镜头,这就要求充分了解 PELCO 的传输协议。
PELCO 常用的两种协议: PELCO-D 协议和PELCO-P 协议。
-PELCO-D 协议解析所有的值都是用的 16进制表示。
同步字通常都是 $FF 。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置 命令字1和命令字2设置如下:Sence 码与Bit4和Bit3有关。
在 Bit4和Bit3为1的情况下,如果 Senee 码为1,则命令就是 自动扫描和和摄像机打开;如果 Sence 码为0,则命令就是手动扫描和摄像机关闭。
当然如果 Bit4或Bit3为0的话那命令就无效了。
数据1表示镜头左右平移的速度,数值从 $00(停止)到$3F (高速),另外还有一个值是 $FF ,表示最咼速。
数据2表示镜头上下移动的速度,数值从$00(停止)到$3F (最高速)。
校验码是指Byte2到Byte6这5个数的和(若超过255则除以256然后取余数)。
-PELCO-P 协议解析PELCO-P 协议一般采用 RS-485传输,波特率为 4800,1位起始位和停止位,8位数据位,无 校验。
其格式如下:起始码是固定值$A0。
地址码是设备的逻辑地址,可由接收设备上的DIP开关来设定。
数据位1到4的意义如下:停止码是固定值$AF。
校验码是Byte2至U Byte6这5个数的异或值(XOR)。
地址码是从0编起的,所以地址码$00表示第一台设备。
PELCO-D和PELCO-P协议另有一些特殊命令,可对设备进行一些高级控制,但这些应用并不常见,限于篇幅,这里不多作介绍,若需要可从直接下载英文资料。
PELCO产品协议解析
PELCO (派尔高)的监控器材在我国有很广泛的应用。
PELCO有自己的传输控制协议,当它的产品配套使用时,可以互相兼容。
但在某些情况下,由于工程的需要,要求用其它设备(比如电脑)来控制PELCO的矩阵或镜头,这就要求充分了解PELCO的传输协议。
银德数据公司的视频解码软件可完全兼容PELCO 协议,可通过PC机控制PELCO的各种设备。
本文为你详细解析PELCO常用的两种协议:PELCO-D协议和PELCO-P协议。
- PELCO-D协议
PELCO-D协议一般用于矩阵和其它设备之间的通信。
它的格式如下:
所有的值都是用的16进制表示。
同步字通常都是$FF。
地址码是指与矩阵通信的那台设备的逻辑地址,可以在设备中设置。
命令字1和命令字2设置如下:
Sence码与Bit4和Bit3有关。
在Bit4和Bit3为1的情况下,如果Sence 码为1,则命令就是自动扫描和和摄像机打开;如果Sence码为0,则命令就是手动扫描和摄像机关闭。
当然如果Bit4或Bit3为0的话那命令就无效了。
数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是$FF,表示最高速。
数据2表示镜头上下移动的速度,数值从$00(停止)到$3F(最高速)。
校验码是指Byte2到Byte6这5个数的和(若超过255则除以256然后取余数)。
- PELCO-P协议
PELCO-P协议一般采用RS-485传输,波特率为4800,1位起始位和停止位,8位数据位,无校验。
其格式如下:
起始码是固定值$A0。
地址码是设备的逻辑地址,可由接收设备上的DIP开关来设定。
数据位1到4的意义如下:
停止码是固定值$AF 。
校验码是Byte2 到Byte6 这5 个数的异或值(XOR)。
地址码是从0编起的,所以地址码$00表示第一台设备。
PELCO-D和PELCO-P协议另有一些特殊命令,可对设备进行一些高级控制,但这些应用并不常见,限于篇幅,这里不多作介绍,若需要可从直接下载英文资料。