物理杠杆示意图
- 格式:docx
- 大小:156.98 KB
- 文档页数:4


生活中常见得杠杆示意图
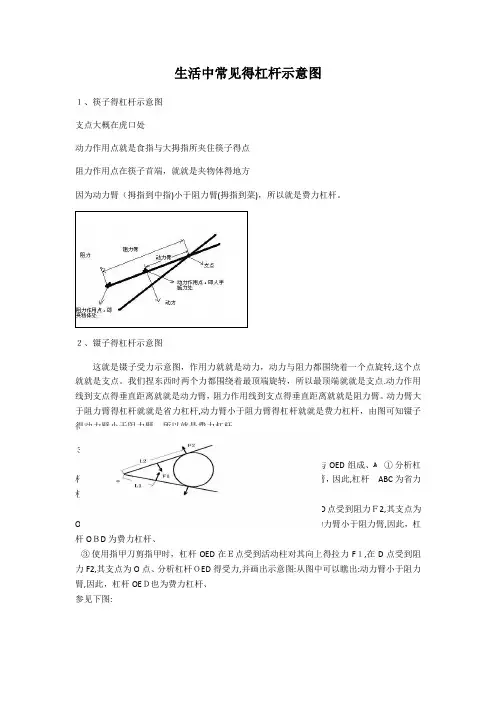
1、筷子得杠杆示意图
支点大概在虎口处
动力作用点就是食指与大拇指所夹住筷子得点
阻力作用点在筷子首端,就就是夹物体得地方
因为动力臂(拇指到中指)小于阻力臂(拇指到菜),所以就是费力杠杆。
2、镊子得杠杆示意图
这就是镊子受力示意图,作用力就就是动力,动力与阻力都围绕着一个点旋转,这个点就就是支点。
我们捏东西时两个力都围绕着最顶端旋转,所以最顶端就就是支点.动力作用线到支点得垂直距离就就是动力臂,阻力作用线到支点得垂直距离就就是阻力臂。
动力臂大于阻力臂得杠杆就就是省力杠杆,动力臂小于阻力臂得杠杆就就是费力杠杆,由图可知镊子得动力臂小于阻力臂,所以就是费力杠杆。
3、指甲刀
如图所示就是一个指甲刀得示意图,它由三个杠杆ABC、OBD与OED组成、ﻫ①分析杠杆ABC得受力,并画出示意图:从图中可以瞧出:动力臂大于阻力臂,因此,杠杆ABC为省力杠杆;
②使用指甲刀剪指甲时,杠杆OBD在B点受到向下得压力F1,在D点受到阻力F2,其支点为O点、分析杠杆OBD得受力,并画出示意图:从图中可以瞧出:动力臂小于阻力臂,因此,杠杆OBD为费力杠杆、
③使用指甲刀剪指甲时,杠杆OED在E点受到活动柱对其向上得拉力F1,在D点受到阻力F2,其支点为O点、分析杠杆OED得受力,并画出示意图:从图中可以瞧出:动力臂小于阻力臂,因此,杠杆OED也为费力杠杆、
参见下图:
4、鱼竿
5、剪刀
6、钉锤
7、瓶起子
8、手推车
车轮与地面得接触点为支点ﻫ手与把得接触点,重心作用点为力得作用点
9、铡刀
10、撬石头。
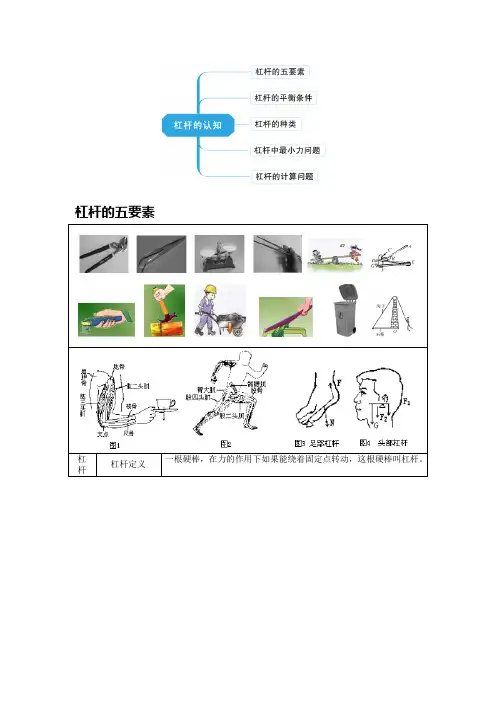
杠杆的五要素杠杆杠杆定义一根硬棒,在力的作用下如果能绕着固定点转动,这根硬棒叫杠杆。
的认识杠杆五要素 1. 支点: 杠杆绕着转动的点 (图中O 点). 2. 动力: 使杠杆转动的力 (图中的F 1). 3. 阻力: 阻碍杠杆转动的力 (图中的F 2). 4. 动力臂: 从支点到动力作用线的距离 (图中l 1). 5. 阻力臂: 从支点到阻力作用线的距离 (图中l 2).一点、二力、两力臂。
(①“一点”即支点,杠杆绕着转动的点,用“O ”表示。
②“二力”即动力和阻力,它们的作用点都在杠杆上。
动力是使杠杆转动的力,一般用“F 1”表示,阻力是阻碍杠杆转动的力,一般用“F 2”表示。
③“两力臂”即动力臂和阻力臂,动力臂即支点到动力作用线的距离,一般用“L 1”表示,阻力臂即支点到阻力作用线的距离,一般用“L 2”表示。
)杠杆的平衡条件杠杆的平衡条件 杠杆平衡 杠杆处于静止状态或绕支点匀速转动时, 都叫杠杆平衡.实验步骤 1. 调节杠杆两端的螺母, 使杠杆在不挂钩码时平衡.2. 给杠杆两端挂上不同数量的钩码, 移动钩码的位置, 使杠杆平衡.3. 把支点右边的钩码重量当作F 1, 支点左边的钩码重量当作阻力F 2; 量出杠杆平衡时的动力臂l 1和阻力臂l 2.4. 改变力和力臂的数值, 再做几次试验, 分析数据得到杠杆的平衡条件.实验装置如下图所示 平衡方程动力⨯动力臂 = 阻力⨯阻力臂 即: 1122F l F l ⨯=⨯杠杆的种类杠杆的种类省力杠杆动力臂大于阻力臂,即l1>l2, 动力小于阻力,F 1<F2. (省力杠杆费距离)例如: 抽水机的手柄、剪铁皮的剪刀、钳子、铡刀、独轮车、起瓶盖的起子、动滑轮、滑轮组等等.费力杠杆动力臂小于阻力臂, 即l1<l2, 动力大于阻力, F1>F2. (费力杠杆省距离)例如: 理发的剪刀、钓鱼杆、镊子等等.等臂杠杆动力臂等于阻力臂, 即l1=l2, 动力等于阻力, F1=F2.例如: 天平、定滑轮等等杠杆中最小力问题由杠杆的平衡条件: 动力⨯动力臂= 阻力⨯阻力臂(1122F l F l⨯=⨯)可知, 要使动力最小, 必须动力臂最大. 要使动力臂最大应做到:(1) 在杠杆上找一点, 使这点到支点的距离最远;(2) 动力方向应该是过该点且和该连线垂直的方向.【典型例题】类型一、杠杆的概念及力臂1、下列关于杠杆的说法中正确的是()A.杠杆的力臂一定在杠杆上B.支点到阻力作用线的距离就是阻力臂C.支点到动力作用点的距离就是动力臂D.力臂的长度不可能为零【思路点拨】杠杆是能在力的作用下绕着固定点转动的硬棒;根据对杠杆的支点、力臂和作用力的了解可逐一做出判断。

一、杠杆1.杠杆的定义:一根硬棒,在力的作用下如果能绕着固定点转动,这根硬棒就叫做杠杆。
在力的作用下能绕固定点转动,这是杠杆的特点。
杠杆有直的也有弯的。
2.杠杆的五要素(1)支点:杠杆(撬棒)绕着转动的点,用字母O标出。
(2)动力:使杠杆转动的力。
画力的示意图时,用字母F1标出。
(3)阻力:阻碍杠杆转动的力。
画力的示意图时,用字母F2标出。
注意:动力和阻力使杠杆转动方向相反,但它们的方向不一定相反。
(4)动力臂:从支点到动力作用线的距离。
用字母L1标出。
(5)阻力臂:从支点到阻力作用线的距离。
用字母L2标出。
二、杠杆平衡条件1.动力×动力臂=阻力×阻力臂,公式:F1×L1=F2×L2。
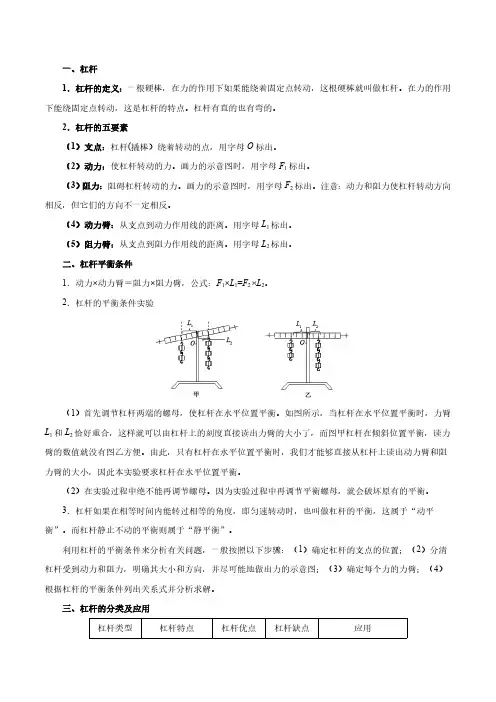
2.杠杆的平衡条件实验(1)首先调节杠杆两端的螺母,使杠杆在水平位置平衡。
如图所示,当杠杆在水平位置平衡时,力臂L1和L2恰好重合,这样就可以由杠杆上的刻度直接读出力臂的大小了,而图甲杠杆在倾斜位置平衡,读力臂的数值就没有图乙方便。
由此,只有杠杆在水平位置平衡时,我们才能够直接从杠杆上读出动力臂和阻力臂的大小,因此本实验要求杠杆在水平位置平衡。
(2)在实验过程中绝不能再调节螺母。
因为实验过程中再调节平衡螺母,就会破坏原有的平衡。
3.杠杆如果在相等时间内能转过相等的角度,即匀速转动时,也叫做杠杆的平衡,这属于“动平衡”。
而杠杆静止不动的平衡则属于“静平衡”。
利用杠杆的平衡条件来分析有关问题,一般按照以下步骤:(1)确定杠杆的支点的位置;(2)分清杠杆受到动力和阻力,明确其大小和方向,并尽可能地做出力的示意图;(3)确定每个力的力臂;(4)根据杠杆的平衡条件列出关系式并分析求解。
三、杠杆的分类及应用杠杆类型杠杆特点杠杆优点杠杆缺点应用省力杠杆L 1>L 2 F 1<F 2 (动力<阻力) 省力费距离撬棒、铡刀、动滑轮、羊角锤、手推车等 费力杠杆L 1<L 2 F 1>F 2 (动力>阻力) 费力省距离起重机的前臂、理发剪刀、钓鱼竿等等臂杠杆L 1=L 2 F 1=F 2 (动力=阻力)既不省力也不费力 天平、定滑轮等四、定滑轮和动滑轮 1.定滑轮(1)定义:中间的轴固定不动的滑轮。

怎样画出指甲剪的三个杠杆图
指甲刀中的杠杆:
如图所示是一个指甲刀的示意图,它由三个杠杆ABC、OBD和OED组成.
①分析杠杆ABC的受力,并画出示意图:从图中可以看出:动力臂大于阻力臂,因此,杠杆ABC为省力杠杆;
②使用指甲刀剪指甲时,杠杆OBD在B点受到向下的压力F1,在D点受到阻力F2,其支点为O点.分析杠杆OBD的受力,并画出示意图:从图中可以看出:动力臂小于阻力臂,因此,杠杆OBD为费力杠杆.
③使用指甲刀剪指甲时,杠杆OED在E点受到活动柱对其向上的拉力F1,在D点受到阻力F2,其支点为O点.分析杠杆OED的受力,并画出示意图:从图中可以看出:动力臂小于阻力臂,因此,杠杆OED也为费力杠杆.参见下图:
自行车手把杠杆示意图钳子剪铁丝杠杆示意图。
生活中常见的杠杆示意图
1.筷子的杠杆示意图
支点大概在虎口处
动力作用点是食指和大拇指所夹住筷子的点
阻力作用点在筷子首端,就是夹物体的地方
因为动力臂(拇指到中指)小于阻力臂(拇指到菜),所以是费力杠杆。
2.镊子的杠杆示意图
这是镊子受力示意图,作用力就是动力,动力和阻力都围绕着一个点旋转,这个点就是支点。
我们捏东西时两个力都围绕着最顶端旋转,所以最顶端就是支点。
动力作用线到支点的垂直距离就是动力臂,阻力作用线到支点的垂直距离就是阻力臂。
动力臂大于阻力臂的杠杆就是省力杠杆,动力臂小于阻力臂的杠杆就是费力杠杆,由图可知镊子的动力臂小于阻力臂,所以是费力杠杆。
3.指甲刀
如图所示是一个指甲刀的示意图,它由三个杠杆ABC、OBD和OED组成.
①分析杠杆ABC的受力,并画出示意图:从图中可以看出:动力臂大于阻力臂,因此,杠杆ABC为省力杠杆;
②使用指甲刀剪指甲时,杠杆OBD在B点受到向下的压力F1,在D点受到阻力F2,其支点为O点.分析杠杆OBD的受力,并画出示意图:从图中可以看出:动力臂小于阻力臂,因此,杠杆OBD为费力杠杆.
③使用指甲刀剪指甲时,杠杆OED在E点受到活动柱对其向上的拉力F1,在D点受到阻力F2,其支点为O点.分析杠杆OED的受力,并画出示意图:从图中可以看出:动力臂小于阻力臂,因此,杠杆OED也为费力杠杆.
参见下图:
4.鱼竿
5.剪刀
6.钉锤
7.瓶起子
8.手推车
车轮与地面的接触点为支点
手与把的接触点,重心作用点为力的作用点
9.铡刀
10.撬石头。