机电一体化
- 格式:ppt
- 大小:8.43 MB
- 文档页数:62

单元一机电一体化概述1. 1. 1机电一体化的定义“机电一体化是在机械主功能、动力功能、信息功能和控制功能上引进微电子技术,并将机械装置与电子装置用相关软件有机结合而构成系统的总称。
”“机电一体化”是将机械技术、微电子技术、信息技术等多门技术学科在系统工程的基础上相互渗透、有机结合而形成和发展起来的一门新的边缘技术学科。
1. 1. 3机电一体化的内容机电一体化包含了技术和产品两方面的内容,首先是指机电一体化技术,其次是指机电一体化产品。
1. 1. 4机电一体化的特点机电一体化产品的显著特点是多功能、高效率、高智能、高可靠性,同时又具有轻、薄、细、小、巧的优点,其目的是不断满足人们生产生活的多样性和省时、省力、方便的需求。
1. 2机电一体化系统的基本组成1. 2. 1机电一体化系统的功能组成传统的机械产品主要是解决物质流和能量流的问题,而机电一体化产品除了解决物质流和能量流以外,还要解决信息流的问题。
机电一体化系统的主要功能就是对输入的物质、能量与信息(即所谓工业三大要素)按照要求进行处理,输出具有所需特性的物质、能量与信息。
机电一体化系统的主功能包括变换(加工、处理)、传递(移动、输送)、储存(保持、积蓄、记录)三个目的功能。
主功能也称为执行功能,是系统的主要特征部分,完成对物质、能量、信息的交换、传递和储存。
机电一体化系统还应具备动力功能、检测功能、控制功能、构造功能等其他功能。
加工机是以物料搬运、加工为主,输入物质(原料、毛坯等)、能量(电能、液能、气能等)和信息(操作及控制指令等),经过加工处理,主要输出改变了位置和形态的物质的系统(或产品)。
动力机,其中输出机械能的为原动机,是以能量转换为主,输入能量(或物质)和信息,输出不同能量(或物质)的系统(或产品)。
信息机是以信息处理为主,输入信息和能量,主要输出某种信息(如数据、图像、文字、声音等)的系统(或产品)。
1. 2. 2机电一体化系统的构成要素机电一体化系统一般由机械本体、传感检测、执行机构、控制及信息处理、动力系统等五部分组成,各部分之间通过接口相联系。
机电一体化概论第一章机电一体化概述2•机电一体化的发展趋势:智能化,模块化,网络化,微型化,绿色化,系统化.3•机电一体化的基本含义:机电一体化乃是在机械的主功能、动力功能、信息功能和控制功能上引进徽电子技术,并将机核装置与电子设备以及相关软件有机结合而构成的系统总称。
5•机电一体化的相关技术:机械技术、传感检测技术、信息处理技术、自动控制技术、伺服驱动技术、系统总体技术。
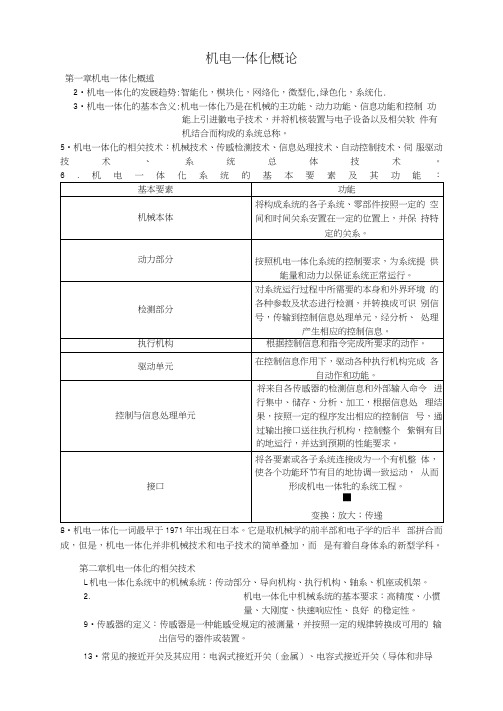
6.机电一体化系统的基本要素及其功能:8•机电一体化一词最早于1971年出现在日本。
它是取机械学的前半部和电子学的后半部拼合而成,但是,机电一体化并非机械技术和电子技术的简单叠加,而是有着自身体系的新型学科。
第二章机电一体化的相关技术L机电一体化系统中的机械系统:传动部分、导向机构、执行机构、轴系、机座或机架。
2.机电一体化中机械系统的基本要求:高精度、小惯量、大刚度、快速响应性、良好的稳定性。
9•传感器的定义:传感器是一种能感受规定的被测量,并按照一定的规律转换成可用的输出信号的器件或装置。
13•常见的接近开关及其应用:电涡式接近开关(金属)、电容式接近开关(导体和非导体)、霍尔接近开关(磁性物件)、光电开关:透射型,反射型(统计产量,检测包装,精确定位等)。
16.在控制系统中根据系统信号相对于时间的连续性,通常分为连续时间系统和离散时间系统(连续系统和离散系统)。
18•计算机控制系统的类型及计算机担当的角色:操作指导控制系统(助手)、宜接数字控制系统(DDC,决策者,操作者)、监督计算机控制系统(SCC, 操作指导系统与DDC系统的综合与发展,决策人)、分级控制系统、集散控制系统(DCS)、工厂自动化(FA)系统。
25•接口的分类(1)根据接口的变换和调整功能特征:零接口、被动接口、主动接口、智能接口。
(2)根据接口的输入\输出功能的性质:信息接口、机械接口、物理接口、环境接口。
(3)按照所联系的子系统不同:人机接口、机电接口。

机电一体化:是在机械的主功能、动力功能、信息功能和控制功能上引进微电子技术,并将机械装置与电子装置用相关软件有机结合而构成的系统总称。
是机械技术及信息技术相互交叉、融合的产物。
精密机械技术、微电子技术、信息技术有机结合新形势。
机电一体化的目的:是使系统高附价值化,即多功能化、高效率化、高可靠化、省材料省能源化、并使产品的结构向轻、薄、短、小巧化方向发展、不断满足人们生活的多样化需求和生产的省力化、自动化需求。
解决产品(系统)采用微电子技术所面临的共性关键技术:检测传感技术、信息处理技术、伺服驱动技术、自动控制技术、精密机械技术、系统总体技术系统必须具有的目的功能:变换(加工、处理)功能;传递(移动、输送)功能;储存(保持、积蓄、记录)功能机电一体化系统的五大要素(即相应功能):动力源(提供动力;内脏);控制器(控制;头脑);机构(构造;骨骼);检测传感器(计测;感官);执行元件(驱动;肌肉)接口:是各要素或各子系统相接处必须具备一定的联系条件接口变换、调整功能分为:零接口、无源接口、有源接口、智能接口接口输入/出功能分为:机械接口、物理接口、信息接口、环境接口工业三大要素:能量、物质、信息(省能、省资源、智能化)系统内部功能评价参数:1主功能:系统误差、抗干扰能力、废弃物输出、变换效率。
2动力功能:输入能量、能源。
3控制功能:控制输出/入口个数、手动操作。
4构造功能:尺寸重量、强度。
5计测功能:精度机电一体化系统的设计流程:1根据目的功能确定产品规格、性能指标;2系统功能部件、功能要素的划分;3接口的设计;4综合评价;5可靠性复查;6试调与调试运动参数:用来表征机器工作运动的轨迹、行程、方向和起、止点位置正确性的指标动力参数:用来表征机器输出动力大小的指标。
力、力矩、功率。
品质指标:用来表征运动参数和动力参数品质的指标。
机电一体化系统设计考虑方法:机电互补法;结合(融合)法;组合法机电一体化系统的设计类型:开发型设计;适应性设计;变异性设计设计程序分为:总体设计、部件的选择与设计、技术设计与工艺设计总体设计:明确设计思想;分析综合要求;划分功能模块;决定性功能参数;调研类似产品;你定总体方案;方案对比定性;编写总体设计论证书设计准则要考虑:人、机、材料、成本等。


机电一体化1、机电一体化的概念:机电一体化是以机械、电子技术和计算机科学为主的多门学科相互渗透、相互结合的过程逐渐形成和发展得一门新兴边缘技术学科。
机电一体化又称机械电子学它是由机械学的前半部分与电子学的后半部分组成的。
2、变量施肥的过程:获取土壤的信息,通过农业专家决策,指定变量施肥处方图并将变量数据输入到施肥变量播种机控制系统中实现变量施肥。
不同变量施肥系统包括:步进电机驱动、电控无级变速器驱动、电控液压马达驱动。
3、伺服系统的组成:输出各部分的作用:(1)控制器:控制器的功能是根据输入信号和反馈信号比较的结果,决定控制方式。
常用的控制有PID 控制和最优控制等。
控制器一般都是电子线路或计算机组成等。
(2)功率放大器:控制器输出的信号通常都很微弱,需经功率放大器放大后,才能驱动执行机构动作。
功率放大器主要由电子器件组成。
(3)执行机构:执行机构直接与被控对象打交道,最后执行控制器的指令,完成某种特定的动作。
执行机构要准确,迅速,精准,可靠地实现对被控对象的调整和控制。
执行机构主要由各种执行元件和机械传动装置等组成。
(4)检测装置:为了提高工作精度和抗干扰能力,伺服系统一般采用闭环控制。
检测装置是系统反馈环节,通过检测装置的测量,将执行机构的输出信号反馈到伺服系统输入端,实现反馈控制。
反馈信号一般为位置反馈信号、速度反馈信号和电流反馈信号,要经过多种传感元件进行检测。
用来检测位置信号的装置有自整角机、旋转变压器、光电编码器等;用来检测速度信号的装置有测速发电机、旋转变压器、光电编码器等;用来检测电流信号的装置有取样电阻霍尔集成电路传感器等,可检测的装置要求是精度高、线性度好、可靠性高、响应快。
4、采样定理:为了保证在采样过程中不丢失原来信号中所包含的信息,采样频率必须按照香侬采样原理来确定,即要求; f≥fmax(L被来原信号f(t)的最高有效频率)在实际应用中,fn≥(5-10)fmax5、采样/保持电路的作用由于采样信号f※(t)在函数轴上仍是连续变化的模拟量,因此还需要A/D转换器将其转换成数字量。
机电一体化1. 机电一体化的定义:在机械的主功能、动力功能、信息功能、控制功能基础上引入微电子技术,并将机械装置与电子装置用相关软件有机地结合所构成系统的总称。
2. 机电一体化一般包含:机电一体化产品(系统)和机电一体化技术两层含义。
3. 机电一体化产品的分类:按机电结合程度分类:✍机械电子化产品✍机械与电子融合的产品。
4. 机电一体化系统的构成:机械本体、检测传感部分、电子控制单元、执行器、动力源。
5. 执行元件:实现机电一体化系统主功能(三个目的功能):变换、传递、储存。
6. 机械本体(构造功能):机械本体包括机架、机械连接、机械传动等,它是机电一体化的基础,起着支撑系统中其他功能单元、传递运动和动力的作用。
7. 动力源(动力功能):是机电一体化产品的能量供应部分,其作用是按照系统控制要求,为系统提供能量和动力,使系统正常运行。
提供能量的方式包括电能、气能和液压能,以电能为主。
8. 传感检测单元(计测功能):对系统运行中所需要的本身和外界环境的各种参数及状态进行检测。
9. 共性关键技术:机械技术、传感检测技术、信息处理技术、自动控制技术、伺服驱动技术、系统总体技术。
10. 广义的接口功能有两种:一种是输入/输出;另一种是变换、调整。
11. 机电一体化系统(产品)的常用设计方法(三种)的区别:✍取代法(机电互补法):取代法就是用电气控制取代原系统中的机械控制机构。
✍整体设计法(融合法):将各构成要素有机结合为一体构成专用或者通用的功能部件(子系统),要素间的机电参数匹配比较充分。
✍组合法:选用各种标准功能模块组合设计成机电一体化系统。
12. 开发性设计、变异性设计、适应性设计有何异同:✍开发性设计:没有参照产品的设计,仅仅是根据抽象的设计原理和要求,设计出质量和性能方面满足目的要求的系统。
✍适应性设计(改进):是在总的方案原理基本保持不变的情况下,对现有产品进行局部更改,或用微电子技术代替原有的机械结构,或为了微电子控制进行局部适应性设计,以提高产品的性能和质量。