建立simotion项目D425并配置其驱动
- 格式:doc
- 大小:130.50 KB
- 文档页数:4
Simotion D V4.0 快速入门之Simotion D 组态及调试西门子(中国)有限公司自动化与驱动集团运动控制部2007.3第一章 Simotion运动控制系统概述现在许多机械制造领域中都有这样的一种趋势:机械运动越来越复杂,对速度及精度的要求也越来越高。
以往这些运动任务是由机械元件以及若干电子装置来完成的(例如:输出凸轮控制器、位控及多轴模块),即使是一个很小的功能变化或是有额外的功能需求都将需要更换元件、采用新的结构、配置、参数设置及甚至重新编程。
同时用于元件更换的库存量也将增加。
针对这种趋势和需求西门子公司推出了全新的解决方案:SIMOTION 运动控制系统:•由一个系统来完成所有的运动控制任务•适用于具有许多运动部件的机器SIMOTION 提供了最佳的运动控制解决方案。
应用领域•从简单的速度轴控制到复杂的多轴电子凸轮插补•从几个轴的同步运行到上百根轴的高精度的角同步关注的领域:•纺织•印刷•橡胶塑料•包装•金属压机•连续物料加工其他第二章 Simotion 运动控制系统硬件概述作为运动控制系统,SIMOTION 将逻辑控制、运动控制(定位、同步等)以及工艺控制(压力、温度控制等)集中在同一个系统中。
SIMOTION 提供了三种硬件平台:• 控制器平台,SIMOTION C ; • 驱动器平台,SIMOTION D ; • PC 平台,SIMOTION P 。
同一个控制程序可以在任意一种平台上运行。
其中,SIMOTION D 是基于SINAMICS S120驱动平台的驱动系统,从而使其成为一个极其紧凑同时具有强大控制功能驱动控制系统。
SIMOTION D 具有若干种规格,具有不同的性能,其中SIMOTION D435适用于中等规模的应用。
它带有两个具有时钟同步的PROFIBUS 接口以及两个以太网口。
同样,SIMOTION D435也通过DRIVE-CLiQ 接口与SINAMICS S120的其它模块进行数据交换。

Scout V4.1.2 如何上载Simotion程序 How to Upload Simotion Program with Scout V4.1.2摘要 介绍了Scout V4.1.2程序上载的方法。
关键词 Simotion D,程序上载,ScoutKey Words Simotion D,Project Upload,ScoutIA&DT Service & Support Page 2 -111. 基本信息从SCOUT V4.1SP2开始,可支持用户程序上载。
通过菜单“Target System > Download> Load to PG”可上载程序到编程设备中。
但能否上载程序还取决于在下载程序时编程人员是否在通过菜单“Options>Settings>CPU download”打开的设置画面中选择了“Store additional data on the target device”,如图1。
图1上载相关设置选项如果没有选择该选项,就无法上载程序。
2.程序上载如果编程器已经有项目文件,并可以正常在线,只是与实际Simotion中的程序有少许差别,这种情况下可直接在线,选择“Target System>Download>Load to PG”可上载程序到PG。
如果编程器上没有项目文件,可以按以下步骤上载程序:1)首先需要保证编程设备和Simotion设备正常连接,Set PG/PC Interface 中设定了正确的连接方式,在本例中使用以太网连接Simotion D435的IE2/NET接口。
Set PG/PC Interface中选择如图2:IA&DT Service & Support Page 3 -11图2 Set PG/PC 设置2)打开Step 7并新建项目:图3 建立新项目IA&DT Service & Support Page 4 -11IA&DT Service & SupportPage 5 -11使用PLC>Edit Ethernet Node 搜索到Simotion D435的IP 地址,如下:图4 搜索当前的设备的IP 地址再将计算机的IP 地址设定相同的网段.如下:图5 设置计算机的IP 地址3) 选择Step 7中的菜单“Step 7>upload station to PG ”,可将Simotion 的硬件组态信上载到编程器中。

1项目简介纺织行业自古以来一直是人类社会不可或缺的一个行业,我国也不例外,作为纺织行业的一个重要组成部分,毛纺业也一直随着社会的发展而发展,毛纺机械设备也一直在随之改变,解放前我国绝大部分的自动化纺织设备都是靠进口,建国后尤其是改革开放之后,国产纺织机械得到长足的发展,但距国外设备还有一定的差距。
临沂成盛精机设备有限公司作为国产毛纺机械设备的制造商,其毛纺走架机设备在市场占有率超过50%,一直紧跟国际毛纺设备发展趋势。
毛纺分毛粗纺和毛精纺,毛粗纺流程大体分为合毛、梳毛、纺锭、落纱、合股等,是将毛纺原料纺成标准纱线的过程、走架机为毛粗纺流水线的一个重要组成部分,负责纺锭的过程,是整个流程中重要的一环,设备的电气控制部分是其精华所在,是生产效率和成纱质量的保证,由青岛环海时代科技有限公司设计调试开发及技术转化。
电气控制中所用西门子产品为s imotionD425-2DP、多轴S120伺服系统、s inamics DCM、ET200S及MP277人机界面。
设备总图如下图所示。
2设备工艺介绍走架机是将梳毛机生产的低强度、低伸长特性的纱线先通过出车加捻拧成一定强度及伸长特性的纱线,然后再回车把纱线缠绕到纱管上并最终纺成纱锭的设备。
纱线也有各种类型,从高支纱到低支纱,大体为8~50,8支纱的意思是8米纱线重量为1克,依次类推,越高支纱越细越轻,强度越低。
设备中用到五台伺服电机及一台直流电机。
五台伺服电机分别为:1为车架电机,用于驱动几十米长的车架在3米或4米长的轨道上来回往复运动;2为退卷电机,用于驱动退卷滚筒轴旋转,将纱线从毛圈上送出,与车架有同步要求;3为罗拉电机,用于驱动罗拉轴旋转,与退卷电机协同动作并保证加捻均匀,与车架同样有同步要求;4为张力电机,用于在车架回车过程中给纱线提供张力来保证纱线纺到纱锭上时具有一定的张力;5为导纱电机,通过跟随车架电机走Cam曲线并根据不同的工艺参数来实现最终不一样的纱锭形状。
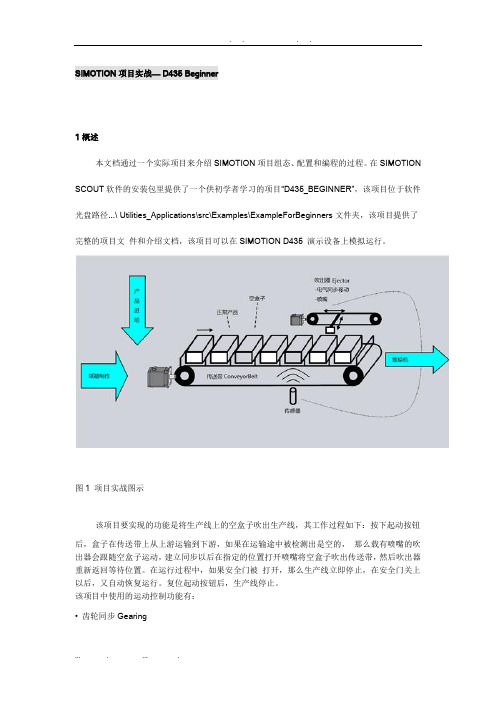
SIMOTION项目实战— D435 Beginner1概述本文档通过一个实际项目来介绍SIMOTION项目组态、配置和编程的过程。
在SIMOTION SCOUT软件的安装包里提供了一个供初学者学习的项目“D435_BEGINNER”,该项目位于软件光盘路径...\ Utilities_Applications\src\Examples\ExampleForBeginners文件夹,该项目提供了完整的项目文件和介绍文档,该项目可以在SIMOTION D435 演示设备上模拟运行。
图1 项目实战图示该项目要实现的功能是将生产线上的空盒子吹出生产线,其工作过程如下:按下起动按钮后,盒子在传送带上从上游运输到下游,如果在运输途中被检测出是空的,那么载有喷嘴的吹出器会跟随空盒子运动,建立同步以后在指定的位置打开喷嘴将空盒子吹出传送带,然后吹出器重新返回等待位置。
在运行过程中,如果安全门被打开,那么生产线立即停止,在安全门关上以后,又自动恢复运行。
复位起动按钮后,生产线停止。
该项目中使用的运动控制功能有:• 齿轮同步Gearing• 凸轮同步Camming• 快速点输出Output Cam2项目中使用的硬件和软件2.1项目中使用的硬件项目使用的硬件基于SIMOTION D435(可以转换到其他SIMOTION硬件),具体的产品如下表所示。
表1 本项目所使用的硬件列表2.2项目中使用的软件表2 本项目所使用的软件列表3项目配置SIMOTION SCOUT项目的基本配置步骤如下:1. 配置驱动器2. 配置工艺对象TO3. 编写程序并分配执行系统4. 连接HMI设备3.1配置驱动器本项目中有两台电机,由双轴电机模块驱动,可以参考下载中心应用文档编号A0309(视频教程)来完成驱动器配置文档名称《SIMOTION D435调试入门》,其下载网址如下:http: ///download/searchResult.aspx?searchText=A0309配置完成以后,可以将驱动重命名为conveyor和eject,项目如下图所示:图2 项目配置配置完成以后,重新进行对SIMOTION和SINAMICS进行下载并保存数据(Copy RAM to ROM)。

蜗轮蜗杆试验台测控系统设计刘淼;白国振【摘要】A measurement and control system of worm gear test platform based on Siemens SIM-OTION D was designed,to test the performance of worm gear by simulating the input angle and out-put of resisting moment of the worm gear in work-ing condition.Design program of the system was mainly introduced,and experiment was carried out on the test platform.%设计了一套基于西门子 SIMOTION D的蜗轮蜗杆试验台测控系统,通过模拟蜗轮蜗杆在工作状态下输入端的转角和输出端所受到的阻力,来测试蜗轮蜗杆的性能。
介绍了测控系统的设计方案,并在试验台上进行了测试实验。
【期刊名称】《机械与电子》【年(卷),期】2014(000)010【总页数】3页(P28-30)【关键词】SIMOTION D;蜗轮蜗杆试验台;Lab-VIEW【作者】刘淼;白国振【作者单位】上海理工大学机械工程学院,上海 200093;上海理工大学机械工程学院,上海 200093【正文语种】中文【中图分类】TP2730 引言蜗轮蜗杆传动是目前机械上常使用的传动方式之一,用以传递空间交错的两轴之间的动力和运动。
具有结构紧凑、传动比大、传动平稳和噪声小等优点,获得了广泛应用。
但由于它的传动效率较低,且啮合处有较大的滑动速度,会产生较严重的摩擦磨损,引起发热,使润滑情况恶化,影响蜗轮蜗杆的使用寿命。
因此,在产品投入使用之前,需要经过大量的实验确定其疲劳寿命。
1 蜗轮蜗杆试验台蜗轮蜗杆试验台结构如图1所示。
Simotion调试笔记7:OPC通信组态与测试操作系统:win7 中文专业版64位需要软件:TIA Portal V13TIA Scout V4.4Simatic Net V12设备:Simotion D425-2 DP/PN开始前准备通过“开始”-“Siemens Automation”,打开“Station Configurator”,检查Station的状态。
打开Station Configurator后,记下Station的名称,如图“ZLH-PC”。
图片下侧如果已经插入了“IE_general”和“OPC_Sever”,将其删除,恢复到如图状态。
操作步骤1.打开TIA博途,新建一个项目,分别插入“D425-2 DP/PN”和“PC Station”,注意再插入PC Station时,PC Station的设备名称要与Station Configurator中的Station的名称相同,如图“ZLH-PC”。
2.设置D425的X150接口IP地址为“192.168.0.1”。
3.点开PC Station的设备视图,添加一个“常规IE”,在目录“通信模块”-“PROFINET/Ethernet”下。
再插入一个“OPC服务器”,注意修改OPC服务器的版本为“SWV12...”。
4.插入完成后记下常规IE和OPC服务器的Index,如图,常规IE的索引值是“1”,OPC服务器的索引值的“2”,后面在设置Station Configurator时,插入“IE general”和“OPC Sever”的index要与其相同5.双击PC Station上的“常规IE”,设置其IP地址为“192.168.0.100”,与本地连接的IPV4地址相同。
6.点开网络视图,选择左上角的“连接”,选择“S7连接”,将Simotion的“X150”口和PC Station的“OPC Sever”连接起来,设置“S7连接”的“特殊连接”属性中,勾选“主动建立连接”。
配轴一.硬件组态:1.直接挂上对应型号S120,及ET200等硬件;2.更改下扫描周期,其它不用改.3.对应控制器下的轴信息,通过配轴后会自动形成4.下载硬件组态二.进口电机配轴1、联机后将驱动器在线进行自动配置:如下图2、点击自动配轴3、完成后离线,进入Drives--Expert list修改P864值(改成1)4、设置信息,载入地址5.通过DP/MPI扩展的CU320控制,可直接通过D425网口进行在线配轴,配轴步骤同D425一样.6、完成以上后,PIB322/PIB323地址才有效三.S120 AC-AC伺服电机配置方法(国产)1、联机在线后先进行自动配置:自动配置后离线,完成后面的操作。
2、自动配置好后离线,添加脚本文件如下:先添加脚本文件夹再导入文件选择脚本文件保存的位置:示例为400W电机1FL6042,打开脚本文件,会自动出现图标如下图导入数据如下:导入成功显示如下:3、再配置驱动如下:只要修改两个地方,其他都默认即可:(如果要使用下图[111]SIMENS telegram,PZD-12/12号报文则选择Basic ,不需要则不选和配置报文注意:当带蜗轮蜗杆减速器或负载大或带刹车时,以下两参数要调整(P1980尽量用10):改为改为改好后在离线状态导入数据,联机后再下载;注意:如果使用脚本配置就能正常工作就不用后面的操作,如果电机不能正常工作需要后面的操作。
4、计算电机参数:设定参数P340=1 如下图:计算结束会自动变为0;再修改如下参数:P600 =0;P1981=180;P1460=P1460*0.8;5、电机数据静态辨识:1) 设定参数P1910=1 如下图:2) 使用Control Panel 测试如下图:选择要测试的驱动,在上使能电机,如果出现上图确认电机已上使能表示电机识别成功。
P1715=153) 使用Control Panel 手动运转电机如下图:注意:1.要正反转多次测试;2.要转速从慢到额定转速都测以下;3.观察电机当前转矩是否在电机额定扭矩以下,如果超出额定扭矩则电机要换更高功率的电机;4.如果测试过程出现7900故障往往是电机输入的参数不对或者驱动/电机不配或者电机/编码器电缆有问题或者拆下电机空载来测试;5.通过以上测试电机在一般的场合就可以使用了,如果要性能更优化需要后面的操作。
注意此文档建立在已知D425的IP地址,且电脑端与其能Ping通
此说明文档仅限为其在线配置驱动
首先建立一个项目
存储路径不能有中文,点击确定
、点击插入一个simotion设备
选择完之后点击OK
由于默认打开一个组态配置,因此会先弹出组态对话框,
我们要做的就是为计算机和D425之间配置好组态并下载到其中
点击后会再弹出个窗口,如下图所示
之后从右侧网络对象选择中,拖拽储一个PG/PC放到图中
如下是拖拽过程
右键图中PG/PC右键“对象属性”
打开对象属性后
如下图
点击确定后会弹出工业以太网的属性
将一个复选框中的对号去掉,原因是我们用的是子网,不需要连接互联网,再将IP地址改为本机的IP地址;
下图是如何查看自己的IP地址,会的可以跳过
配置好IP后,点击新建
新建子网,点击确定如图
点击完确定后如图
这样PC的接口就分配完成了,点击确定
完成后如上图,在下图红圈的位置上,右键,点击对象属性,为其连接以太网
上图中的IP地址为D425的IP地址
点击属性按钮
在点击确定
然后再确定即可出现下图界面,就可以保存并编译,编译成功后关闭当前窗口
回到下图画面
点击下载把组态内容下载到D425中
下载完成后网卡会重启
关闭组态界面
组态界面下载后可直接点击连接
点击链接后,有以下选项,选择Online
红色位置表明设备尚未链接,原因是没有下载
用下面几张图片配置电机驱动
断开链接
调整电机的控制参数
此处两个参数的值由0改为1
按照此方法
把另外两个电机的参数也改了
点击保存后,链接D425,并且点击下载,否则参数不会写到里面接下来调试我们的驱动
点击此处
测试电机,其他完全雷同电机转了,表示
驱动已经配置好了
上图中的两个参数
P864是控制板的使能允许,P840是控制板的启动停止开关允许接下来配置编码器的报文
点击change进入
选择用户自定义
配置完105报文后保存并下载
配置105报文必须建立在离线状态,否则值写不进去。