4-1脉宽调制变换器
- 格式:doc
- 大小:479.50 KB
- 文档页数:5
PWM 调光知识介绍在手机及其他消费类电子产品中,白光 LED 越来越多地被使用作为显示屏的背光源。
近来,许多产品设计者希望白光 LED 的光亮度在不同的应用场合能够作相应的变化。
这就意味着,白光 LED 的驱动器应能够支持 LED 光亮度的调节功能。
目前调光技术主要有三种:PWM 调光、模拟调光、以及数字调光。
市场上很多驱动器都能够支持其中的一种或多种调光技术。
本文将介绍这三种调光技术的各自特点,产品设计者可以根据具体的要求选择相应的技术。
PWM Dimming (脉宽调制) 调光方式——这是一种利用简单的数字脉冲,反复开关白光LED驱动器的调光技术。
应用者的系统只需要提供宽、窄不同的数字式脉冲,即可简单地实现改变输出电流,从而调节白光 LED 的亮度。
PWM 调光的优点在于能够提供高质量的白光,以及应用简单,效率高!例如在手机的系统中,利用一个专用 PWM 接口可以简单的产生任意占空比的脉冲信号,该信号通过一个电阻,连接到驱动器的 EN 接口。
多数厂商的驱动器都支持PWM 调光。
但是,PWM 调光有其劣势。
主要反映在:PWM 调光很容易使得白光 LED 的驱动电路产生人耳听得见的噪声(audible noise,或者 microphonic noise)。
这个噪声是如何产生?通常白光 LED 驱动器都属于开关电源器件(buck、boost 、charge pump 等),其开关频率都在1MHz左右,因此在驱动器的典型应用中是不会产生人耳听得见的噪声。
但是当驱动器进行PWM调光的时候,如果 PWM 信号的频率正好落在 200Hz 到 20kHz 之间,白光 LED 驱动器周围的电感和输出电容就会产生人耳听得见的噪声。
所以设计时要避免使用 20kHz 以下低频段。
我们都知道,一个低频的开关信号作用于普通的绕线电感(wire winding coil),会使得电感中的线圈之间互相产生机械振动,该机械振动的频率正好落在上述频率,电感发出的噪音就能够被人耳听见。
现代电力电子及变流技术第四章脉宽调制(PWM)技术脉宽调制技术:按同一比例改变在ur 和uc交点时刻控制IGBT 的通断u r 和uc的点时刻制IGBT 的通断控制公用三角波载波uc 三相的调制信号依次u c u rW单相逆变器结构特点电路结构特征:2个桥臂输出电压:ab ag bg V V V =−结构分析:�每个桥臂存在2个开关状态—桥臂上开关通(用S a =1描述);—桥臂下开关通(用S a =0描述)。
�逆变器共有4种开关状态—S a S b :00,01,10,11。
开关状态与电压的关系4.5 4.5 SVPWMSVPWM 的原理及实现结构特点�两个桥臂电压V ag 和V bg 分别独立可控——控制存在两个自由度;�由于连接了负载,输出电压V ab 具有唯一性——只有一个自由度。
如何分析两维的桥臂电压和一维的输出电压之间的联系?几何分析方法矢量空间�桥臂电压构成两维空间,两个自由度分别代表两个垂直方向——桥臂电压空间;�输出电压只有一个自由度,构成一维空间 ——输出电压空间。
4.5 4.5 SVPWMSVPWM 的原理及实现桥臂电压和输出电压的联系�采用投影方式建立联系;�开关状态(00),(11)形成的两个桥臂电压——对应一个输出电压(0V)。
这一投影具有唯一性投影关系ag ab bg 01111V V V V −⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦V 0是零序电压*11ag 22ab 11bg 220*V V V V ⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥−⎣⎦⎣⎦⎣⎦逆变器控制方法V 0*为一定范围的任意数注:V 0*取常数(如V i )时,Vag 和Vbg 的驱动波形可以设计。
例:V ab *取0.5V i , V 0*取V iV ag 取0.75V i , V bg 取0.25V ia 桥臂上管b 桥臂下管b 桥臂上管a 桥臂下管4.5 4.5 SVPWMSVPWM 的原理及实现V 0*取其他值会怎样? V 0*有没有一个取值原则?4.5 4.5 SVPWMSVPWM 的原理及实现三相逆变器结构特点结构特征:3个桥臂电路特征:()ng ag bg cg 3V V V V =++结构分析:�每个桥臂存在2个开关状态—桥臂上开关通(用S a =1描述);—桥臂下开关通(用S a =0描述)。
脉宽调制(PWM)和1位数模转换在FPGA的一个引脚连接一个扬声器,然后用来听MP3?当然可以。
这里我们采用的方法是:使用PC来解码MP3,然后将解码后的数据送到配置为1位DAC的FPGA。
音频输出我们需要一个部件来连接FPGA的输出引脚(数字)和扬声器(模拟),以完成数模转换。
最简单的办法是用一个电阻网络或者数模转换器件实现。
由于相当于声音信号的频域来说,FPGA是在是太快了,所以采用1位DAC是更好的选择。
最简单的实验1位DAC的办法是:使用脉宽调制(PWM)脉宽调制脉宽调制在输出引脚上产生一系列脉冲输出。
输出有这样的特性:输出信号幅度的平均值正比于输入调制器的数值的大小。
想办法对输出进行滤波,就可以在输出端得到与数字输入对应的模拟信号。
脉宽调制器的输入可以是任意宽度,通常是8位或16位其输出则是1位的(一个输出)脉宽调制也广泛的应用于微控制器,详见应用笔记AN665.累加器生成脉宽调制信号的最简单的办法就是使用硬件累加器。
一旦累加结果溢出,就输出1(高电平),否则输出0(低电平)。
这在FPGA中很容易实现。
V erilog 代码:module PWM(clk, PWM_in, PWM_out);input clk;input [7:0] PWM_in;output PWM_out;reg [8:0] PWM_accumulator;always @(posedge clk) PWM_accumulator <= PWM_accumulator[7:0] PWM_in;assign PWM_out = PWM_accumulator[8];endmoduleVHDL 代码:library IEEE;use _LOGIC_;use _LOGIC_;entity PWM isport (clk : in std_logic;PWM_in : in std_logic_vector (7 downto 0) := “00000000”;PWM_out : out std_logic);end PWM;architecture PWM_arch of PWM issignal PWM_Accumulator : std_logic_vector(8 downto 0);beginprocess(clk, PWM_in)beginif rising_edge(clk) thenPWM_Accumulator <= (“0” & PWM_Accumulator(7 downto 0)) (“0” & PWM_in);end if;end process;PWM_out <= PWM_Accumulator(8);end PWM_arch;输入数据越大,累加器越快溢出,从而使得输出1的频率越高,这正是我们希望的。
脉宽调制控制电路学生姓名:胡真 学号:20085042054工业现场控制当中,经常要用到一些可变的直流电压,而一般的直流电源其值是固定不变的,为了得到可变的直流电压,我们一般采用脉宽调制控制电路,也就是我们通常所说的PWM 控制电路。
该电路是利用半导体功率晶体管或晶闸管等开关器件的导通和关断,把直流电压变成电压脉冲列,控制电压脉冲的宽度或周期达到变压目的,或者控制电压脉冲宽度和脉冲列的周期以达到变压变频的目的的一种变换电路,多用在开关稳压电源、不间断电源(UPS)以及交直流电机调速等控制电路中。
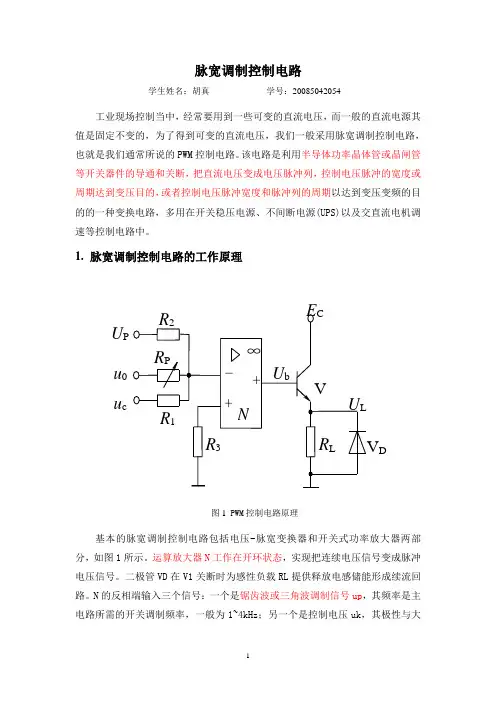
1. 脉宽调制控制电路的工作原理图1 PWM 控制电路原理基本的脉宽调制控制电路包括电压-脉宽变换器和开关式功率放大器两部分,如图1所示。
运算放大器N 工作在开环状态,实现把连续电压信号变成脉冲电压信号。
二极管VD 在V1关断时为感性负载RL 提供释放电感储能形成续流回路。
N 的反相端输入三个信号:一个是锯齿波或三角波调制信号up ,其频率是主电路所需的开关调制频率,一般为1~4kHz ;另一个是控制电压uk ,其极性与大U u 0 u cD小随时可变; 再一个是负偏置电压u0,其作用是在Uc =0时通过Rp 的调节使比较器的输出电压Ub 为宽度相等的正负方波。
当Uc>0时,锯齿波过零的时间提前,结果在输出端得到正半波比负半波窄的调制方波。
当Uc<0时,锯齿波过零的时间后移,结果在输出端得到正半波比负半波宽的调制方波。
图2 PWM 控制负载的波形图PWM 信号加到主控电路的开关管V 的基极时,负载RL 两端电压uL 的波形如图2所示。
显然,通过PWM 控制改变开关管在一个开关周期T 内的导通时间τ的长短,就可实现对RL 两端平均电压UL 大小的控制。
2. 典型脉宽调制电路2.1. 对脉宽调制器的基本要求(1)死区要小,调宽脉冲的前后沿的斜率要大,也就是比较器的灵敏度要足够高。
(2)在设计实际电路时,应使其简单、可靠,且不受外界干扰。
mps脉宽调整电源方案
调整脉冲宽度调制(PWM)电源方案是一种常见的方法,用于控制电源输出的电压和电流。
这种方法通过调整开关器件(例如MOSFET)的导通时间来实现对电源输出的精确控制。
以下是一些常见的脉宽调制电源方案:
1. 单极性PWM调整,单极性PWM调整是一种基本的脉宽调制方案,通过控制开关器件的导通时间来调整输出电压。
这种方案适用于许多低成本和低功率应用。
2. 双极性PWM调整,双极性PWM调整是一种更高级的方案,它可以实现正负输出电压。
这种方案通常用于需要正负电压输出的应用,如音频放大器和直流-交流变换器。
3. 多级PWM调整,多级PWM调整方案使用多个级联的PWM调制器件,以实现更高的电源输出精度和稳定性。
这种方案通常用于需要非常精确电压和电流控制的应用,如工业电源和精密仪器。
4. 数字PWM调整,数字PWM调整方案使用数字控制器或微处理器来实现对PWM信号的精确数字调整。
这种方案通常提供更高的灵
活性和精度,适用于需要复杂控制算法的应用,如电动汽车和太阳能逆变器。
在选择脉宽调制电源方案时,需要考虑诸如成本、功率效率、控制精度、EMI(电磁干扰)和应用特定要求等因素。
同时,还需要确保所选方案符合相关的安全标准和法规要求,以确保电源系统的可靠性和安全性。
![全数字控制的桥式可逆直流脉宽调速系统设计 [附图+中英文翻译]](https://uimg.taocdn.com/8a2bccc6aa00b52acfc7cae3.webp)
XXXXXXXX大学本科生毕业设计姓名:XXX 学号:XXXX学院:信息与电气工程学院专业:电气工程与自动化设计题目:全数字控制的桥式可逆直流脉宽调速系统设计专题:指导教师:XXXX 职称:XXXXXXXX年6月XXXXXXXX大学毕业设计任务书学院信息与电气工程学院专业年级电气02—3 学生姓名曹言敬任务下达日期:XXXX年2月20日毕业设计日期:XXXX 年 2 月20日至XXXX 年6月20日毕业设计题目:全数字控制的桥式可逆直流脉宽调速系统设计毕业设计专题题目:毕业设计主要内容和要求:1、直流电机的参数为15KW,电枢电压440V,电枢电流39.5A,励磁电压90V,励磁电流7A,转速为1510转/分。
2、制定主电路方案并进行选型设计计算。
3、用PROTEL设计全数字控制系统的电路原理图及PCB图。
4、编制控制软件。
5、基于MATLAB对桥式可逆直流脉宽调速系统进行仿真研究。
6、翻译与论文相关的电气自动化方面专业外文资料约5000字。
7、用OFFICE—WORD打印论文。
院长签字:指导教师签字:XXXXXXXX大学毕业设计指导教师评阅书指导教师评语(①基础理论及基本技能的掌握;②独立解决实际问题的能力;③研究内容的理论依据和技术方法;④取得的主要成果及创新点;⑤工作态度及工作量;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:指导教师签字:年月日XXXXXXXX大学毕业设计评阅教师评阅书评阅教师评语(①选题的意义;②基础理论及基本技能的掌握;③综合运用所学知识解决实际问题的能力;③工作量的大小;④取得的主要成果及创新点;⑤写作的规范程度;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:评阅教师签字:年月日XXXXXXXX大学毕业设计答辩及综合成绩摘要直流脉宽调速系统,是采用脉冲宽度调制的高频开关控制方式,形成的脉宽调制变换器——直流电动机调速系统,简称直流PWM调速系统。
1 4波长阻抗转换器
1 4波长阻抗转换器(1 to 4 wavelength impedance converter)是一种用于将电路的输入或输出阻抗在不同波长下进行转换的器件。
它通过改变电路的结构和参数,使得电路在不同波长下表现出不同的阻抗特性。
在光纤通信系统中,不同的波长对应着不同的光学频率。
1 4波长阻抗转换器可以将电路在一个波长下的阻抗转换为其它3个波长下的阻抗。
这种转换器常用于光纤接口或光纤调制解调器等光通信设备中,用于实现多波长信号的互联和转换。
1 4波长阻抗转换器通常由多个阻抗匹配电路、耦合器、滤波器等组成。
它可以通过匹配和调节电路的参数,使得信号在不同波长下得到最佳的传输和转换效果。
这种转换器的设计和制造需要考虑波长、频率、功率等多种因素,以确保转换的准确性和稳定性。
总的来说,1 4波长阻抗转换器是一种高频电路设备,用于将电路的阻抗在不同波长下进行转换。
它在光纤通信系统中具有重要的应用价值,能够实现多波长信号的互联和转换,提高了光通信系统的灵活性和传输效率。
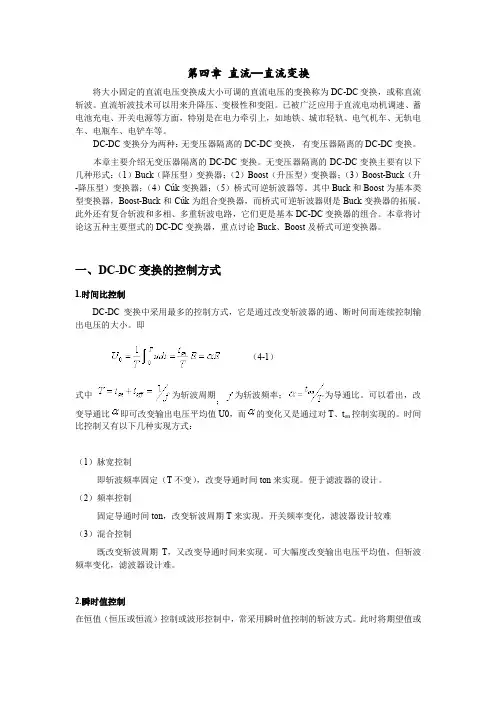
第四章直流—直流(DC-DC)变换将大小固定的直流电压变换成大小可调的直流电压的变换称为DC-DC变换,或称直流斩波。
直流斩波技术可以用来降压、升压和变阻,已被广泛应用于直流电动机调速、蓄电池充电、开关电源等方面,特别是在电力牵引上,如地铁、城市轻轨、电气机车、无轨电车、电瓶车、电铲车等。
这类电动车辆一般均采用恒定直流电源(如蓄电池、不控整流电源)供电,以往采用变阻器来实现电动车的起动、调速和制动,耗电多、效率低、有级调速、运行平稳性差等。
采用直流斩波器后,可方便地实现了无级调速、平稳运行,更重要的是比变阻器方式节电(20~30)%,节能效果巨大。
此外在AC-DC变换中,还可采用不控整流加直流斩波调压方式替代晶闸管相控整流,以提高变流装置的输入功率因数,减少网侧电流谐波和提高系统动态响应速度。
DC-DC变换器主要有以下几种形式:(1)Buck(降压型)变换器;(2)Boost(升压型)变换器;(3)Boost-Buck(升-降压型)变换器;(4)Cúk变换器;(5)桥式可逆斩波器等。
其中Buck和Boost为基本类型变换器,Boost-Buck和Cúk为组合变换器,而桥式可逆斩波器则是Buck变换器的拓展。
此外还有复合斩波和多相、多重斩波电路,它们更是基本DC-DC变换器的组合。
4.1 DC-DC变换的基本控制方式DC-DC变换是采用一个或多个开关(功率开关器件)将一种直流电压变换为另一种直流电压。
当输入直流电压大小恒定时,则可控制开关的通断时间来改变输出直流电压的大小,这种开关型DC-DC变换器原理及工作波形如图4-1所示。
如果开关K导通时间为,关断时间为,则在输入电压E恒定条件下,控制开关的通、断时间、的相对长短,便可控制输出平均电压U0的大小,实现了无损耗直流调压。
从工作波形来看,相当于是一个将恒定直流进行“斩切”输出的过程,故称斩波器。
斩波器有两种基本控制方式:时间比控制和瞬时值控制。
直流脉宽调制(PWM)变换器
直流pwn变换器在一个开关周期内;当0
什么是PWM脉宽调制脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中
所谓脉宽,其实就是指脉冲的宽度。
举个例:我们放一盆水,一直不停的放要1分钟放满,但我为了控制放满的时间,在每一秒的时间里需要开一下,关一下。
而这开和关的时间比值就可以认为是脉冲的占空比,开的时间长,相应的关的时间就会缩短(每秒必须完成一次开和关,相当于脉冲的频率)。
而放满的时间就可以通过这样的方式来调节(相当于控制输出)这样通过调整开和关的时间(脉冲宽度)来调整输出的,就是脉宽调制。
基本原理控制方式就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等的脉冲,用这些脉冲来代替正弦波或所需要的波形。
也就是在输出波形的半个周期中产生多个脉冲,使各脉冲的等值电压为正弦波形,所获得的输出平滑且低次谐波少。
优点:从处理器到被控系统信号都是数字形式的,无需进行数模转换。
让信号保持为数字形式可将噪声影响降到最小。
噪声只有在强到足以将逻辑1改变为逻辑0或将逻辑0改变为逻辑1时,也才能对数字信号产生影响。
相关链接什么是直流pwm变换器直流PWM 变换器的原理。
电力电子变换器的工作原理及分类电力电子变换器是一种将电能从一种形式转变成另一种形式的电力设备,它可以实现电力的调节、转换和控制。
本文将介绍电力电子变换器的工作原理及其常见的分类。
一、工作原理电力电子变换器的工作原理基于半导体器件的开关特性,通过对源电压的调节和转换来实现对负载电压和电流的控制。
1.开关模式电力电子变换器通过半导体开关器件(如二极管、MOS管、IGBT 等)的开和关,实现对输入电源进行切割,从而实现对负载电压和电流的控制。
开通时,输入电源的能量传递到负载;关闭时,能量传递中断。
2.脉冲宽度调制(PWM)脉冲宽度调制是电力电子变换器中常用的控制策略。
通过改变开关器件的导通时间比例,即调节脉冲宽度,可以实现对输出电压和电流的精确调整。
3.谐振模式电力电子变换器中的谐振模式是在特定情况下通过合理的电路设计和参数匹配,使得开关器件在合适的时间、状态下完成开关操作,从而提高变换器的能量效率。
二、分类根据不同的工作原理和应用场景,电力电子变换器可以分为多种类型。
以下是常见的几种分类方式:1.按输入输出电源类型分类(1)直流-直流变换器(DC-DC变换器):用于将直流电源的电压转换为不同电压等级的直流电源。
(2)直流-交流变换器(DC-AC变换器):将直流电源的能量转换为交流电能,常用于逆变器等应用中。
(3)交流-交流变换器(AC-AC变换器):用于改变交流电源的电压和频率,例如交流调压器。
2.按器件类型分类(1)二极管整流器:利用二极管的导通和截止特性,将交流电源转换为直流电源。
(2)可控硅整流器:利用可控硅开关进行整流控制,适合于高功率、高电压的整流应用。
(3)逆变器:将直流电源转换为交流电源,常用于太阳能发电系统、电动汽车等领域。
(4)斩波器:通过频率、相位和幅度等方式对交流电源进行调节,常用于电力系统的稳压调频。
3.按控制方式分类(1)电压型变流器:通过控制输出电压的大小和波形来实现对负载的控制。
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 四分之一波长阻抗变换器原理及分析176南昌高专学报 2011 年第 6 期(总第 97 期) 2011 年12 月出版Journal of Nanchang College No.6(Sum 97) Dec.2011四分之一波长阻抗变换器原理及分析李艳芳 1 付子豪 2(1.江西科技师范学院,江西南昌 330038;2.中国传媒大学,北京 100024)摘要:从传输线的原理开始,通过对传输线原理的阐述,引入了反射系数、驻波比和输入阻抗等概念。
根据所推导的公式分析出四分之一波长传输线的原理,进而得出四分之一波长阻抗变换器。
关键词:四分之一波长阻抗变换器;传输线;匹配;同轴线中图分类号:TN911文献标识码:A文章编号:1008-7354(2011)06-0176-040 引言传输线理论在微波技术的领域中应用非常广泛。
其主要应用在两个方面:一是利用其有限长度均匀、无耗传输线的一些特性,设计不同的元器件;二是利用这种传输线理论解决传输线中能量传输中的一些问题。
而四分之一波长阻抗变换器是基于传输线理论而产生的一种极其常见的应用。
四分之一波长阻抗变换器可看作是一段有限长的传输线关于具有终端电压和电流以及终端负载阻抗进行变换作用。
它在微波技术领域有非常重要的作用。
1/ 13本文就四分之一波长阻抗变换器的工作原理进行具体分析并对其在微波器件中的应用进行介绍。
1 传输线的基本理论传输线的定义是:凡是能够引导电磁波沿一定方向传输的导体、介质或由它们共同组成的导波系统。
传输线是微波技术中重要的基本原件之一,因为它不仅可以把电磁波的能量从一处传输到另一处,而且还可以将其作为基本组成部分来构成各种途径的微波元器件。
FB41SFB41参数说明FB41是一种特殊的信号发生器,常用于电子测试和研究中。
它具有多种功能和参数,下面将对其进行详细说明,主要包括如下方面:1.输出参数:FB41的输出频率范围为1μHz-40MHz,可以满足不同领域的需求。
该设备可提供各种波形输出,包括正弦波、方波、三角波、锯齿波等。
2.输出幅度:FB41的输出幅度范围从0V到30V可调,能够满足不同电路和设备对幅度的需求。
同时,其输出电流也是可调的,范围从0A到3A。
3.脉宽调制:FB41支持脉宽调制(PWM)功能,可以在正弦波、方波等波形上进行脉宽调制,以产生不同的信号形态。
4.调制功能:FB41还支持调制功能,包括幅度调制(AM)、频率调制(FM)、相位调制(PM)和脉冲调制(PM),以满足不同测试需求。
5.相位调整:FB41具有相位调整功能,可以在信号周期内精确调整相位,以满足用户对相位关系的要求。
6.频率稳定度:FB41的频率稳定度在10ppm以内,能够提供高精度和稳定的信号输出。
7.脉冲参数:FB41支持脉冲参数设置,包括脉宽、占空比等。
用户可以根据需求调整脉冲特性,以适应不同的应用场景。
8.外部调制:FB41还支持外部调制功能,可以通过外部信号源对输出信号进行调制,以实现更复杂的信号形态。
9.存储功能:FB41具有存储功能,可以保存用户设置的参数和波形,方便日后重复使用。
10.远程控制:FB41支持远程控制功能,可以通过外部设备或计算机对其进行远程操作和控制。
总结:FB41是一款功能强大的信号发生器,具有广泛的应用领域。
它具有多种输出参数和功能,包括频率范围广、输出幅度可调、脉宽调制、调制功能、相位调整、频率稳定度高、脉冲参数设置、外部调制、存储功能和远程控制等。
这些功能和参数使得FB41成为电子测试和研究领域中不可或缺的工具之一。
本章提要
□ 脉宽调制变换器
□ 直流脉宽调速系统的机械特性
V-M直流调速系统通过调节触发装置GT的控制电压来移动触发脉冲的相位,即可改变整流电压U d,从而实现平滑调速。
与G-M系统相比V-M系统有很多优越性,但它也有缺点:
① 电流是脉动的,产生谐波分量,尤其在低速时,因此需要加平波电抗器。
设备投入大,体积增加,同时电感大又限制了系统的快速性。
② 当系统在较低速运行时,晶闸管的导通角很小,使系统的功率因素很低,并产生较大的谐波电流,引起电网电压波形畸变殃及附近的用电设备,也限制了调速范围。
③ 对过电压、过电流敏感,要注意保护。
◎直流PWM调速系统优点:
① 主电路简单,不用电抗器,用电机本身的电感,从而获得脉动很小的直流电流;
② 开关频率高,电枢电流容易连续,无电流断续问题;
③ 系统的低速运行平稳,调速范围较宽;
④ 频带宽,响应快;
⑤ 功率因数高。
电流和电压永远相同,无无功功率问题。
PWM 调速系统和V-M 调速系统主要区别在主电路和PWM控制电路。
闭环控制系统以及静、动态分析和设计基本一样。
PWM 脉宽调速系统的主电路采用脉宽调制变换器。
4-1 脉宽调制变换器
一、不可逆PWM变换器
电机两端得到的平均电压为
式中ρ= ton / T 为PWM 波形的占空比,改变ρ(0 ≤ ρ < 1 )即可调节电机的转速。
PWM 脉宽调速系统如上述介绍有许多优点,但也存在缺点:
① 过压能力低,需保护;
② VT单向导电性,不可逆,无制动。
需要制动时,必须具有反向电流-id的通路,因此应再设置一个电力晶体管。
二、可逆PWM变换器
可逆PWM变换器主电路有H型、T型多种形式,最常用的是桥式(亦称H型)电路,如下图所示。
这时,电动机M 两端电压的极性随开关器件基极驱动电压极性的变化而改变,其控制方式有双极式、单极式、受限单极式等多种,这里只着重分析最常用的双极式控制的可逆PWM变换器。
2. 工作状态与波形
① 正向运行:
·在0 ≤ t ≤ ton 期间,Ug1 =Ug4为正,VT1 、VT4导通,Ug2 =Ug3为负,VT2 、VT3截止,电流id 沿回路1流通,电动机M两端电压UAB = +Us ;
·在ton ≤ t ≤ T期间,Ug1 =Ug4为负,VT1 、VT4截止;由于电感储存很大能量,放电,维持电流方向不变,这时通过VD2 、VD3续流,并钳位使VT2 、VT3保持截止,电流id 沿回路2流通,电动机M两端电压UAB = –Us 。
② 反向运行:先分析ton→T 阶段
·在ton ≤ t ≤ T 期间,Ug2 = Ug3 为正,VT2 、VT3导通,Ug1 =Ug4为负,使VT1 、VT4截止,电流– id 沿回路3流通,电动机M两端电压UAB = – Us ;
·在T≤ t ≤ T+ton ( 下一周期的0 ≤ t ≤ ton ) 期间,Ug2 = Ug3为负,VT2 、VT3截止,VD1 、VD4 续流,并钳位使VT1 、VT4截止,电流–id 沿回路4流通,电动机M两端电压UAB = +Us 。
④ 输出平均电压
双极式控制可逆PWM变换器的输出平均电压为
为占空比
·当> 0时,t on > T/2 ,Ud = +,电机正转;
·当< 0时,t on < T/2 ,Ud = -,电机反转;
·当= 0时,ton = T/2,电机停止。
◎注意:
当电机停止时电枢电压并不等于零,而是正负脉宽相等的交变脉冲电压,因而电流也是交变的。
这个交变电流的平均值为零,不产生平均转矩,徒然增大电机的损耗,这是双极式控制的缺点。
但它也有好处,在电机停止时仍有高频微振电流,从而消除了正、反向时的静摩擦死区,起着所谓“动力润滑”的作用。
双极式可逆PWM制动时情况比较复杂,根据VT3、VT2的通断情况,电机可能处在能耗制动、再生发电或反接制动,产生制动时一定具备上述其中一个制动过程。
⑤ 性能评价
·双极式可逆PWM变换器的优点:
a)电流一定连续;
b)可使电机在四象限运行;
c)电机停止时有微振电流,能消除静摩擦死区;
d)低速平稳性好,系统的调速范围可达1:20000左右;
e)低速时,每个开关器件的驱动脉冲仍较宽,有利于保证器件的可靠导通。
·双极式可逆PWM变换器的缺点:
a)在工作过程中,4个大功率晶体管可能都处于开关状态,开关损耗大;
b)在切换时可能发生上、下桥臂直通的事故,为了防止上述情况,在上、下桥臂的驱动脉冲之间,应设置逻辑延时。