- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
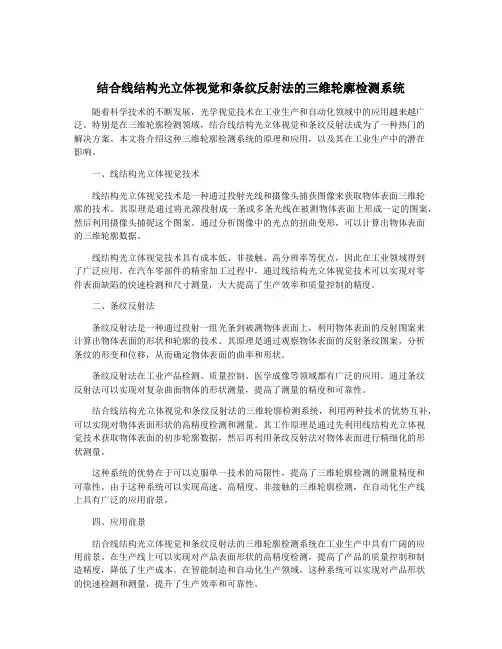
图 1 测量系统 F ig. 1 M easurement sy stem
器 2 和 4 要求能对叶片前缘尾缘的形貌细节进行测 量。四激光线结构光发生器经过调整, 使光带中心 在同一平面内。被测物体置于中间的载物台上, 用 一个精密的运动机构带动上下运动。图像传感器 2 和 4 可以绕系统中心在一定范围内旋转, 以此来对 准叶片前缘尾缘处的形貌细节。物体上下运动时, 激光发生器产生的光会在物体表面形成光带, 光带 的形状包含有三维物体轮廓的截面形状信息。四图 像传感器从四个方向获得光带的图像, 经过标定解 算得到物体一个截面的空间分段曲线, 对分段曲线 进行数据处理得到物体一个截面的测量数据。根据 测量精度要求, 设置上下运动机构的运动步长。工 件在系统中上下运动一次, 完成一次测量过程。
第 36 卷 第 1 期 2009 年 1 月
中国激光 CH INESE JOU RNAL OF L ASERS
文章编号: 0258- 7025( 2009) 01- 0182- 07
V ol. 36, N o. 1 January, 2009
线结构光三维轮廓测量系统的标定方法
张维光 赵 宏 张 琦 周 翔
l5 X + l 6Y + l 7Z + l8 +
y ( l9 X + l10 Y + l11 Z + 1) = 0,
( 1b)
式中 l1 ~ l11 是摄像机内、外参数的函数[ 8] 。( 1a) 式
表示平面 B的表达式, ( 1b) 式表示平面 A的表达式,
18 4
中
国
A aS 三点共线的条件是两平面的交线。至少应用 6 组物点与像点的对应坐标, 就可解算出 l 1 ~ l11 参 数。
3 系统标定方法
3. 1 摄像机的数学模型 在测量过程中, 各摄像机获得的只是光带在一
定范围内的图像, 两摄像机彼此获得的光带图像重
叠部分少且在实际测量中存在遮挡现象, 因此机器 视觉中的双目视差标定理论不能满足系统的标定要
求。系统各摄像机的标定必须采用单摄像机标定的
方法完成。工业测量中单摄像标定方法可以分为两
Abstract Sev eral camer as ar e used in three- dimensio na l( 3D ) measurement sy stem w ith linear- structur e lig ht, to measure w hole pr ofile and pa rtial detail of complex object with hig h- pr ecision and 360b measurement range. A measurement system , which is composed of fo ur cameras, has been develo ped . A new calibr ation metho d is pr esented t o calibr ate the cameras simult aneously. It uses direct linear transformat ion model and a self- desig ned dr one co nt rol field w ith many co ntr ol points t o calculat e the model par ameters, and adopts dua lit y inter po lation to rectify the 3D coo rdinates of measur ed object . T he calibrat ion process of the system is part icularly descr ibed . Furthermo re, a no vel method, w hich is based o n t wo- dimensional discrete F ourier tr ansfo rm, to extr act mult-i resolution contr ol po ints on dr one is intro duced. T he result show s the met ho d can calibr ate sev eral cameras sy nchro nously fo r mult-i sensor measur ement system. Key words measurement; three- dimensio nal measurement; calibratio n; direct linear tr ansfo rmation; discr ete Four ier tr ansfo rm; linear- str uctur e lig ht
2 测量系统
图 1 系统是为满足航空发动机叶片 360b高精度 测量要求而设计的。叶片测量的要求是测量气动数 据曲线的形状。叶片尾缘处气动数据曲线曲率半径 接近于 1 m m。测量系统由四个激光线结构光发生 器、四个图像传感器及带动载物台上下运动的机械 机构组成。传感器 1 和 3 用于测量叶片的叶盆和叶 背表面轮廓, 该部分气动数据曲线曲率变化小; 传感
Zhang W eiguang Zhao H ong Zhang Q i Zhou Xiang
( State K ey L abor ator y f or M anuf actur ing S y stems E ngineer ing, X i. an J iaotong Univ er sity , X i. an, S hanx i 710049 China)
本文针对航空发动机 叶片 360b高精度测 量的 要求设计了多放大倍率的四图像传感器线结构光三 维形貌测量系统。根据测量系 统标定的特点 及要 求, 利用机器视觉系统标定的直接线性变换法模型 解算模型参数, 应用设计的可进行多分辨率控制点 提取的靶标对四图像传感器系统进行了标定。介绍 了多分辨率靶标特征点的二维离散傅里叶变换提取 方法及四图像传感器在同一靶标下标定的过程, 并 给出了测量结果。
1期
张维光等: 线结构光三维轮廓测量系统的标 定方法
18 3
是影响测量精度和测量效率的重要因素。测量系统 常用的标定技术有: 细丝散射法、齿形靶标法以及交 比不变法等[ 4~ 6] 。这些标定方法都要求精密加工的 标准模型, 且模型的定位精度要求很高, 标定难度较 大。此外这些 标定方法适用于 单传感器系统 的校 准, 对于多传感器测量系统, 需考虑多传感器之间的 位置关系, 测量系统后续的数据融合难度大。文献 [ 7] 介绍了双图像传感器系统的标定, 这种标定方法 的靶标分辨率固定, 摄像机畸变分量采用有限项近 似的方法处理, 对于放大倍率相差大的多图像传感 器标定误差较大。
类: 摄像机内外参数标定方法和直接线性变换法[ 8] 。
摄像机内外参数标定法可以标定出摄像机内参数和
外参数, 畸变参数一般要建立非线性畸变模型或通
过插值的方法完成。直接线性变换法通过解算三维
空间坐标与成像平面之间的线性模型, 获得变换关 系的参数, 对模型计算误差用一定的校正算法处理
来完成对系统的标定。本系统的标定采用直接线性
dir ect linear tr ansfo rmatio n
测量系统中光带的中心平面不变, 标定光带中 心平面与成像平面之间的关系, 选取光带中心平面 为物方空间坐标系 Z = 0 的平面。令( 1) 式中 Z = 0 简化为
l1 X + l 2 Y + l4 + x ( l 9 X + l10 Y + 1) = 0。( 2) l5 X + l 6 Y + l8 + y ( l 9 X + l 10 Y + 1) = 0 本系统采用( 2) 式进行标定。 3. 2 标定控制场及特征点的提取 为了解算出成像平面与光带中心平面之间最佳 的映射关系所对应的 l1 ~ l 11 参数, 求解( 2) 式中的 物点 A ( X , Y , 0) 及所对应的像点 a( x , y) 在测量范 围内的数量越大, 迭代求解 l1 ~ l 11 参数收敛性越 好, 同时通过成像平面坐标 a( x , y ) 求解物 点坐标 A( X , Y, 0) 应用插值方法进行的误差校正范围越 小, 所标定的精度越高。设计系统标定所使用的具 有两级分辨率的标准靶标控制场如图 3 所示。控制 场中的物点坐标为两条线的交点。摄像机 1 和 3 放 大倍率相对较小, 标定所用物点坐标为图 3 中粗线 的交点。摄像机 2 和 4 放大倍率大, 标定所用物点
收稿日期: 2008- 01- 07; 收到修改稿 日期: 2008- 05- 04 基金项目: 国家 973 计划( 2005CB724106) 和国家自然科学基金( 50575169) 资助课题。 作者简介: 张维光( 1973- ) 男, 博士研究生, 主要从事智能化光电检测及机器人 视觉技术方面的研究。 E- mail: Wg _zhang 05@ 126. co m 导师简介: 赵 宏( 1964- ) 男, 教授, 主要从事智能化光电检测、实时在线检测以及机器人视觉技术、光纤生物信息检测以 及生物组织成像技术等方面的研究。E- mail: zhao ho ng @ mail. x jt u. edu. cn
激
光
36 卷
坐标为图 3 中粗细线所有的交点。图 4 为摄像机 2 在测量时的标定靶标图像, 在一次测量中的范围如 图 3 矩形区域所示。摄像机 3 标定靶标图像与图 3 类似, 摄像机 4 的标定靶标图像与图 4 类似, 成像平 面中特征像点的坐标采用如下步骤求得。
图 2 直接线性变换法共线方程示意图 Fig . 2 Schematic of co linear equat ion of
![结构光三维视觉标定点发生装置[实用新型专利]](https://uimg.taocdn.com/ab2e301df61fb7360a4c65d4.webp)
