安川机器人IO信 对照表
- 格式:pdf
- 大小:82.53 KB
- 文档页数:2
安川外部IO启动正文:一、安川外部IO启动1.1 引言安川是一种高性能的自动化设备,具有广泛的应用领域。
为了实现的正常运行,需要对外部IO进行启动配置。
本文档将详细介绍安川外部IO的启动步骤和配置要求。
1.2 目的本文档的目的是为操作人员提供安川外部IO启动的参考指导,确保能够正确地连接和实现IO功能。
1.3 适用范围本文档适用于使用安川的用户和维护人员,包括但不限于以下具体应用:工业生产线、装配线、焊接应用等。
二、外部IO启动步骤2.1 硬件准备在启动安川的外部IO之前,需要进行以下硬件准备工作:1) 确保的电源正常连接并接通;2) 将与外部IO设备通过适当的接口进行连接;3) 验证连接线路的稳定性和连接端口的正确性。
2.2 IO配置界面安川提供了用户界面来进行IO的配置。
在控制器上,打开IO 配置界面,并确保界面显示正常。
2.3 IO配置参数设置根据具体应用需求,设置外部IO的参数。
包括输入信号的类型和数量、输出信号的类型和数量、信号的电平范围等。
2.4 检查和测试在完成IO配置参数设置后,进行IO的检查和测试,确保IO信号的正常传输和响应。
可以通过观察的状态、检查IO指示灯或使用示波器等方式进行测试。
2.5 调试和优化根据检查和测试的结果,对于存在的问题进行调试和优化。
可以修改参数设置、调整连接线路、更换IO设备等方式来解决问题。
三、附件本文档附有以下附件供参考:1) 安川外部IO启动配置图表;2) 安川外部IO连接线路图;3) 其他相关配置文件或工具。
四、法律名词及注释1、外部IO:指连接到控制器的输入输出设备,用于与进行信号交互。
2、接口:用于外部IO设备与控制器之间的物理连接和信号传输。
3、参数设置:指根据应用需求和设备规格,对外部IO的各项参数进行配置和调整。
4、检查和测试:用于验证外部IO设备和信号传输的正确性和可靠性。
5、调试和优化:通过修改参数设置、调整连接线路等方式,解决IO信号传输中的问题,达到优化IO的目的。
引言:在现代工业生产中,技术被广泛应用,安川作为全球领先的制造商之一,其产品以其高度的稳定性和可靠性而闻名。
安川外部IO 启动是指通过外部IO端口与其他设备进行连接,实现的启动和控制。
本文将详细阐述安川外部IO启动的相关内容。
正文:1.外部IO概述1.1定义:外部IO(Input/Output)是指与周边设备进行通信和数据交换的接口。
1.2作用:外部IO可以实现与其他设备的联动控制,如传感器的输入和执行器的输出。
1.3类型:外部IO可分为数字IO和模拟IO两种类型。
1.4数字IO:数位量输入或输出,一般用于触发输入和开关量输出。
1.5模拟IO:模拟量输入或输出,一般用于传感器数据输入和执行器控制输出。
2.安川外部IO接口2.1安川外部IO接口介绍:安川提供了丰富的外部IO接口,以满足不同应用需求。
2.2信号类型:安川外部IO接口包括数字输入、数字输出、模拟输入、模拟输出等多种类型。
2.3连接方式:安川外部IO接口通常通过连接线与外部设备进行连接,具体连接方式根据应用需求而定。
2.4扩展性:安川外部IO接口可通过扩展模块进行扩展,从而满足更多的输入输出需求。
3.安川外部IO启动步骤3.1硬件准备:准备安川和外部设备之间的连接线,并确保连接正确无误。
3.2软件设置:在安川控制系统中进行外部IO设置,包括指定IO端口的功能和参数。
3.3信号调试:通过测试外部设备的输入输出信号,确保与安川的通信正常。
3.4联动程序编写:根据具体应用需求编写与外部设备的联动程序,实现启动和控制功能。
3.5联动测试:进行与外部设备的联动测试,验证系统的稳定性和可靠性。
4.安川外部IO应用案例4.1与传感器的联动:通过外部IO接口连接传感器,实现自动检测和反馈控制。
4.2与执行器的联动:通过外部IO接口连接执行器,实现自动执行和控制。
4.3与PLC的联动:通过外部IO接口与PLC进行通信,实现工业自动化控制。
4.4与视觉系统的联动:通过外部IO接口连接视觉系统,实现视觉引导和识别功能。
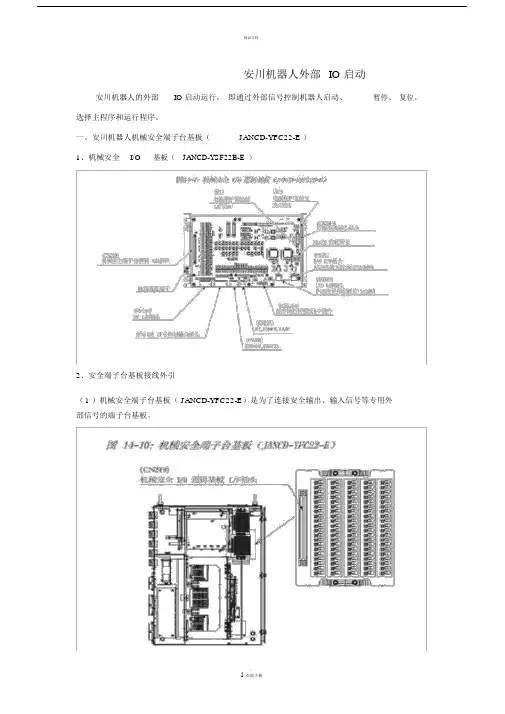
精品文档安川机器人外部IO 启动安川机器人的外部IO 启动运行,即通过外部信号控制机器人启动、暂停、复位、选择主程序和运行程序。
一、安川机器人机械安全端子台基板(JANCD-YFC22-E )1、机械安全I/O基板(JANCD-YSF22B-E)2、安全端子台基板接线外引(1 )机械安全端子台基板( JANCD-YFC22-E)是为了连接安全输出、输入信号等专用外部信号的端子台基板。
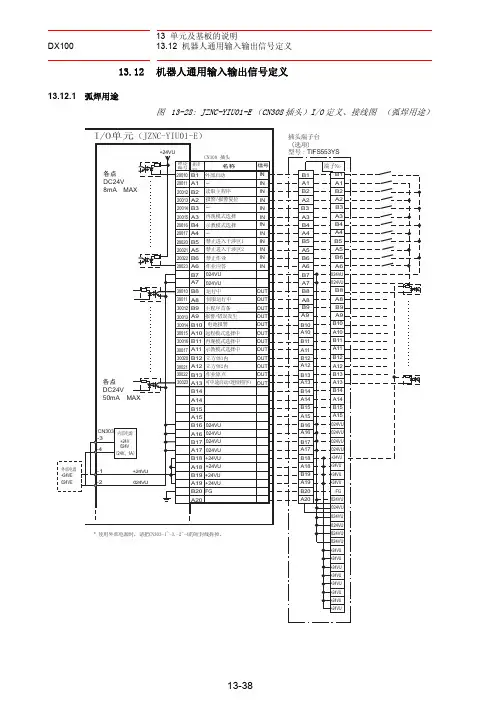
精品文档( 2 )安全端子基台实物图片3、安全段子台基板100 个端口作用JANCD-YFC22-E连接端子表二、安川机器人通用I/O基板(JANCD-YIO21-E)1、通用IO 基板插头外接( 1 )电箱背板插头精品文档( 2 )外接实物图( 3 )机器人通用输入输出连接器(CN306、 307 、 308 、 309 )机器人通用输入输出连接器(CN306、307 、308 、309 )的连接制作连接在通用I/O基精品文档下图。
电线请使用无屏蔽的双绞线。
(电线一侧的插头及I/O端子台为选装件)( 4 )连接器端子头( 5 )外接端子实物图CN306( 6 )外接端子实物图CN3082、通用IO 基板供电电源( 1 )接线板端子( 2 )实物接线图:用外接开关电源24V 和 0V3、通用IO 基板 CN306 图(1 ) CN306 接线端子图精品文档(2 ) CN306 实物图精品文档4、通用IO 基板 CN307精品文档5、通用IO 基板 CN308(1 ) CN308 接线端子图精品文档(2 ) CN308 实物图精品文档精品文档6、通用IO 基板 CN309三、安川外部启动常用的信号及其接线图1、安全端子台基板常用IO 接线图( 1 )外部急停接线图外连接外部操作设备等的急停开关时使用。
输入信号,关闭伺服电源,停止程序执行。
信号输入时,无法接通伺服电源。
由于机器人出厂时配有跳线,使用时必须先取下跳线。
不取下跳线,即使输入了外部急停信号也不会起作用,会造成人身伤害或设备损坏。
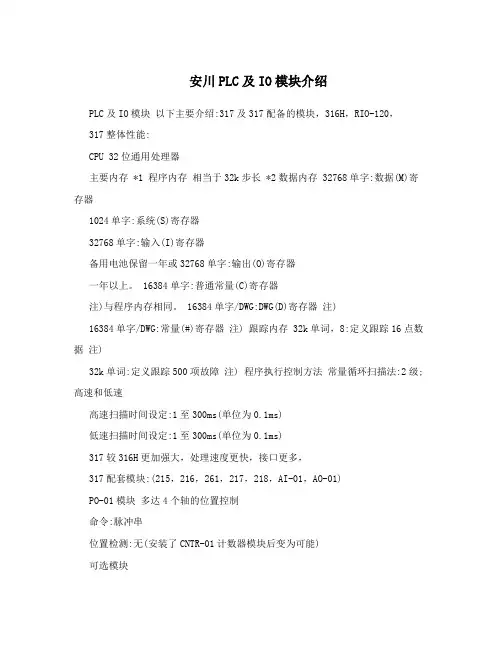
安川PLC及IO模块介绍PLC及IO模块以下主要介绍:317及317配备的模块,316H,RIO-120,317整体性能:CPU 32位通用处理器主要内存 *1 程序内存相当于32k步长 *2数据内存 32768单字:数据(M)寄存器1024单字:系统(S)寄存器32768单字:输入(I)寄存器备用电池保留一年或32768单字:输出(O)寄存器一年以上。
16384单字:普通常量(C)寄存器注)与程序内存相同。
16384单字/DWG:DWG(D)寄存器注)16384单字/DWG:常量(#)寄存器注) 跟踪内存 32k单词,8:定义跟踪16点数据注)32k单词:定义跟踪500项故障注) 程序执行控制方法常量循环扫描法:2级;高速和低速高速扫描时间设定:1至300ms(单位为0.1ms)低速扫描时间设定:1至300ms(单位为0.1ms)317较316H更加强大,处理速度更快,接口更多,317配套模块:(215,216,261,217,218,AI-01,AO-01)PO-01模块多达4个轴的位置控制命令:脉冲串位置检测:无(安装了CNTR-01计数器模块后变为可能)可选模块I/O 寄存器输入:512个单词(输入/输出用的前496个单词,其余16个单词用(CP-213:1行/模块) 于系统使用)寄存器输出:512个单词(输入/输出用的前496个单词,其余16个单词用于系统使用)I/O 寄存器输入:2048个单词 (CP-215:1行/模块) 寄存器输出:512个单词(最多) I/O 寄存器输入/输出:1024个单词 (CP-216:1行/模块)I/O 寄存器输入:1024个单词 (CP-225:1行/模块) 寄存器输出:1024个单词I/O 寄存器输入/输出:1024个单词 (CP-2500:1行/模块) 寄存器输出:256个单词(最多) I/O 寄存器输入/输出:1024个单词 (CP-2520:1行/模块) 寄存器输出:1000个单词(最多) I/O 寄存器输入/输出:512个单词 (2000IOIF:1行/模块) I/O 寄存器输入:512个单词 (820IF:1行/模块) 寄存器输出:512个单词 I/O DI:32点 (LIO-01) DO:32点输入 PI:4点(CNTR-01)输入 AI:8点(AI-01)输入 DI:64点(DI-01)输出 AO:4点(AO-01)输出 DO:64点(DO-01)消息传输(可选) CP-213:独有的过程CP-215:MEMOBUS协议/无协议CP-216:MEMOBUS协议/无协议CP-217:MEMOBUS协议/无协议CP-218:MEMOBUS协议/无协议CP-225:MEMOBUS协议/无协议CP-2500:MEMOBUS协议/无协议CP-2520:MEMOBUS协议/无协议其它日历和时间(年、月、日、小时、分钟、秒)诊断功能由监视计时器和总线计时器检测错误ROM:总数检测RAM:读/写检测电池低电压检测? 指示灯当CP-317在线且正常运转时,RDY LED和RUN LED灯亮,并且ALM LED和ERR LED灯灭。
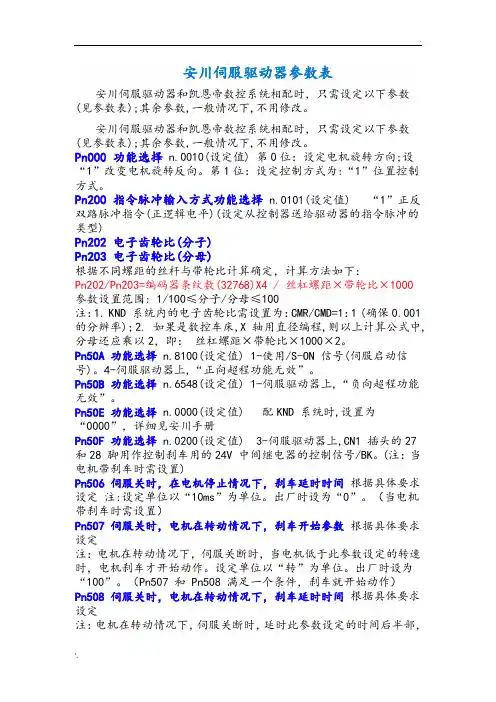
安川伺服驱动器参数表安川伺服驱动器和凯恩帝数控系统相配时,只需设定以下参数(见参数表);其余参数,一般情况下,不用修改。
安川伺服驱动器和凯恩帝数控系统相配时,只需设定以下参数(见参数表);其余参数,一般情况下,不用修改。
Pn000 功能选择 n.0010(设定值) 第0位:设定电机旋转方向;设“1”改变电机旋转反向。
第1位:设定控制方式为:“1”位置控制方式。
Pn200 指令脉冲输入方式功能选择 n.0101(设定值) “1”正反双路脉冲指令(正逻辑电平)(设定从控制器送给驱动器的指令脉冲的类型)Pn202 电子齿轮比(分子)Pn203 电子齿轮比(分母)根据不同螺距的丝杆与带轮比计算确定,计算方法如下:Pn202/Pn203=编码器条纹数(32768)X4 / 丝杠螺距×带轮比×1000参数设置范围: 1/100≤分子/分母≤100注:1. KND 系统内的电子齿轮比需设置为:CMR/CMD=1:1 (确保0.001 的分辨率);2. 如果是数控车床,X 轴用直径编程,则以上计算公式中,分母还应乘以2,即:丝杠螺距×带轮比×1000×2。
Pn50A 功能选择 n.8100(设定值) 1-使用/S-ON 信号(伺服启动信号)。
4-伺服驱动器上,“正向超程功能无效”。
Pn50B 功能选择 n.6548(设定值) 1-伺服驱动器上,“负向超程功能无效”。
Pn50E 功能选择 n.0000(设定值) 配KND 系统时,设置为“0000”,详细见安川手册Pn50F 功能选择 n.0200(设定值) 3-伺服驱动器上,CN1 插头的27 和28 脚用作控制刹车用的24V 中间继电器的控制信号/BK。
(注:当电机带刹车时需设置)Pn506 伺服关时,在电机停止情况下,刹车延时时间根据具体要求设定注:设定单位以“10ms”为单位。
出厂时设为“0”。
(当电机带刹车时需设置)Pn507 伺服关时,电机在转动情况下,刹车开始参数根据具体要求设定注:电机在转动情况下,伺服关断时,当电机低于此参数设定的转速时,电机刹车才开始动作。
局部变量与用户变量有以下四点不同:
• 只能在一个程序中使用
对于用户变量而言,可在多个程序中定义或使用一个变量;而局部变量只能在定义了局部变量的程序中使用,不能从其他程序读写。
而且,因为局部变量不对其他程序造成影响,所以,以 LB001 局部变量为例,可以分别在多个程序中定义并使用。
• 可自由设定使用个数
设定过程在程序信息画面进行,设定了个数后,只有所设定部分保留有内存空间。
• 局部变量的内容显示要利用用户变量
例:要查看用户变量 LP000 的内容时,要先存入用户变量P001,执行了存储命令后,看P001 的位置型变量画面。
命令如下:
SET P001 LP000
• 局部变量的内容仅在定义程序的执行过程中有效
局部变量会在调出定义了局部变量的程序(用CALL 或 JUMP 命令执行程序或“选择程序”)时,保存局部变量的空间。
一旦程序执行,则所设局部变量内容在因为RET、 END 或 JUMP 命令的执行而脱离该程序时,立刻无效,但是在正在使用局部变量的程序中用CALL 命令调出其他程序,又用RET 命令返回时,则可继续使用执行CALL 命令前的数据内容。
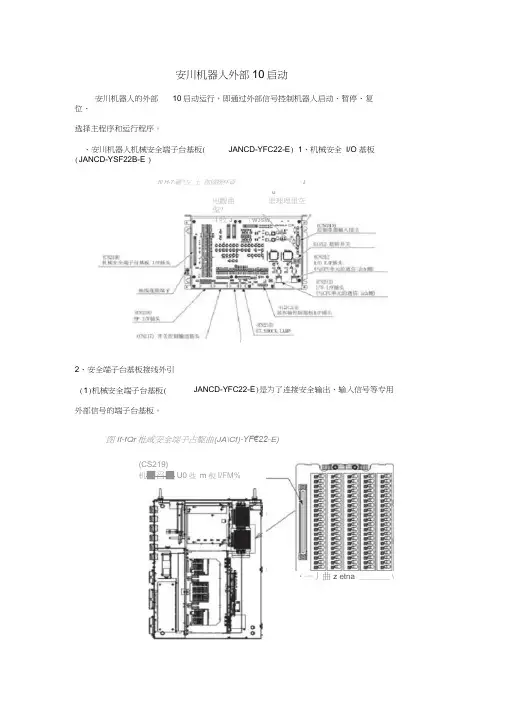
安川机器人外部10启动安川机器人的外部 10启动运行,即通过外部信号控制机器人启动、暂停、复位、选择主程序和运行程序。
、安川机器人机械安全端子台基板( JANCD-YFC22-E ) 1、机械安全 I/O 基板(JANCD-YSF22B-E )ffl H-7:碾*左 士 伽逵操林資J2、安全端子台基板接线外引 (1)机械安全端子台基板( 外部信号的端子台基板。
图If-fQr 枇咸安全端子占駆曲(JA\Cf)-YF€22-E)(CS219)机■舀■ U0些 m 板I/FM%u电觀曲里理理里空聖? ⑷牧J\ W3SWIJANCD-YFC22-E )是为了连接安全输出、输入信号等专用、一丿曲z etna _______ \(2 )安全端子基台实物图片3、安全段子台基板100个端口作用JANCD-YFC22-E 连接端子表二、安川机器人通用I/O 基板(JANCD-YI021-E)1、通用10基板插头外接(1)电箱背板插头图I F-^:逋用I/O 堆扳百'卜、卞世卜F)(3)机器人通用输入输出连接器( CN306、307、308、309 )机器人通用输入输出连接器(CN306、307、308、309 )的连接制作连接在通用I/O 基板(JANCD-YIO21-E )的输入输出插头( CN306、307、308、309 )的电线时,请参考朮噩貂转熹建搽曙IVWT)&7WH1 25 權縣Fl F2血远保护w*t J.lS ALISOV\ ICSSEH)\加痂和Hi 幻匸烬〔[\ylbl融才壇出人LM(g 盹町tii 辛输简人建桂!&Q 婀姑旃岀人连摆葺... ............................................ ..IFM P ・ Mttfllttl fa" M"> Ff!*H 11 >sTIPII IP p|,""Bi BrB "| IpWWIpapi |.| |||« ||i|i ii it ・vgoe* *annfi 畫:囂口即呃口他DOQSD ^-^^^DUDnccnn aoc口口2JC :C ~SUBBBCflC(2)外接实物图F图。
安川简易手册安川简易手册一.速度控制模式1.接线:2.主要参数:PN000:控制方式选择,出厂值就是速度控制模式0000PN300:速度指令输入增益,设定以额定转速运行伺服电机所需的速度指令的模拟量电压电平。
出厂值为600,单位0.01V/额定速度,即出厂为6V对应着电机的额定转速。
PN50A:此参数是用于I/O口的分配,出厂值为2100,第三位上的0表示外部使能,即CN1口的40和47脚之间有24V电压时,电机处于使能状态,此时CN1口的5和6脚之间有模拟电压输入,电机就可以旋转。
如果改为2170,即上电电机就处于使能状态。
第一位2表示正限位输入口的分配,CN1口的42脚输入信号为ON(L电平)时电机可正转,否则电机停转,即遇到正限位。
PN50B:此参数是用于I/O口的分配,出厂值为6543,重要的是第四位上的3表示负限位输入口的分配,CN1口的43脚输入信号为ON(L电平)时电机可反转,否则电机停转,即遇到负限位。
注:如果限位开关信号没有输入驱动器,则要定义成一直可正转驱动和可反转驱动,否则电机不转。
PN100:速度环增益PN101:速度环积分时间参数PN102:位置环增益PN103:转动惯量比二.位置控制模式7-8(指令脉冲输入) 11-12(指令符号输入) 15-14(清除输入)端子,指令控制器侧的指令脉冲偏移脉冲清除信号的输出电路可以从总线驱动器输出集电极开路输出(2种) 的3种中任意选择,其中要注意的是集电极开路,客户外部供电要注意电压和电流,过大要串电阻。
2.主要参数:PN000:控制方式选择,出厂值是速度控制模式0000,改为0010位置控制模式Pn00b:0001PN200:位置控制指令形态选择,可以选择是正负脉冲还是脉冲加方向,也可以选择正负逻辑。
PN100:速度环增益PN101:速度环积分时间参数PN102:位置环增益PN103:转动惯量比PN50A,PN50B同速度控制模式8170 PN50B 6548PN202:电子齿轮比分子PN203:电子齿轮比分母3.电子齿轮比的计算和设置:编码器脉冲数5系列电子齿轮比设置越大,相同的脉冲数转的圈数越多,即转一圈所需的脉冲数越少。
NADEX焊机IO信号与安川DX200机器人硬接线连接
一、安川机器人:DX200 MS165
二、NADEX焊机:IWC 5A
焊机的输入端用硬接线连接到机器人外部输出IO端子台(CN306插头)
焊机的输出端用硬接线连接到机器人外部输入IO端子台(CN306插头)图片如下
图1为焊机外观图
图2为焊机输入输出IO端子及用途说明
图3为焊机输入输出IO端子硬接线实物图
图4为机器人(CN306插头)输入输出IO端子硬接线实物图
图5为焊机输出与机器人外部输入IO的接线图
图6为焊机输入与机器人外部输出IO的接线图
图7为机械安全I/O基板及CN306插头位置(注:IO端子台需接外部电源时需取下图中的CN303 -1与-3 -2与-4之间的短接线)
上图1为焊机外观图
上图2为焊机输入输出IO端子及用途说明
上图3为焊机输入输出IO端子硬接线实物图
上图4为机器人(CN306插头)输入输出IO端子硬接线实物图
上图5为焊机输出与机器人外部输入IO的接线图
上图6为焊机输入与机器人外部输出IO的接线图
上图7为机械安全I/O基板及CN306插头位置(注:IO端子台需接外部电源时需取下图中的CN303 -1与-3 -2与-4之间的短接线)
如何走的总线:两台机器人1#与2#,从1#机器人走到2#机器人控制柜里的PROFIBUS板卡上,再转到触摸屏里面的(旁边挂有输入输出模块KL1809与KL2809)的接头最后再连接到触摸屏下面的接头。
如下图8
上图8为机器人#2控制柜转过来的总线。
安川机器人IO单元说明书1. 引言安川机器人IO单元是一种用于控制和监测机器人系统输入输出信号的设备。
本说明书将详细介绍该IO单元的功能、特点、安装方法、使用注意事项等内容,以帮助用户正确使用和维护该设备。
2. 功能和特点2.1 功能•提供多个输入端口和输出端口,可连接各种传感器、执行器等外部设备。
•实现机器人系统与外部设备之间的数据交换和控制。
•支持多种通信协议,如Modbus、EtherCAT等。
2.2 特点•高可靠性:采用高质量的电子元件,具有良好的抗干扰能力和稳定性。
•灵活性:可根据用户需求进行配置,支持自定义输入输出信号类型。
•易于安装:提供详细的安装指南和接线图,方便用户进行安装和接线工作。
•易于使用:配备友好的用户界面,简化操作流程,降低学习成本。
3. 安装方法3.1 前提条件在安装IO单元之前,请确保已经完成以下准备工作: - 确定IO单元的安装位置,保证其与机器人系统的其他部件之间的连接顺畅。
- 确保安装环境干燥、通风良好,避免灰尘和湿气对设备造成影响。
- 准备所需的工具和材料,如螺丝刀、接线端子等。
3.2 安装步骤1.将IO单元放置在预定位置,并使用螺丝将其固定在机器人系统上。
2.根据接线图,将外部设备的信号线与IO单元的输入输出端口相连接。
注意正确连接极性和信号类型。
3.检查所有接线是否牢固可靠,确保没有松动或短路情况。
4.连接IO单元的电源线,并确保电源稳定可靠。
5.进行电气测试,检查各个输入输出端口是否正常工作。
4. 使用注意事项为了确保安全和正常运行,请遵守以下使用注意事项: 1. 在操作或维护IO单元之前,请务必断开电源,并等待至少5分钟以消除残余电荷。
2. 避免过载操作。
请根据设备规格表确定每个输入输出端口的最大负载能力,并不要超过其额定值。
3. 定期检查设备和连接线路的状态,如发现异常情况,请及时修理或更换。
4.请勿拆卸或改装IO单元,以免损坏设备或导致安全隐患。
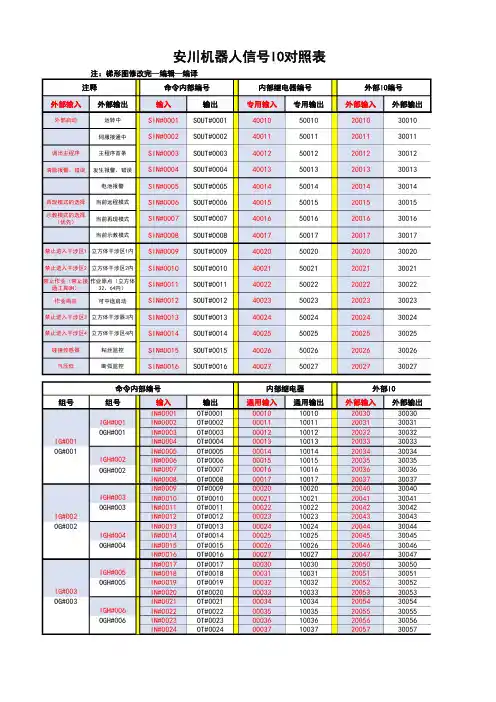
注:梯形图修改完--编辑--编译外部输入
外部输出
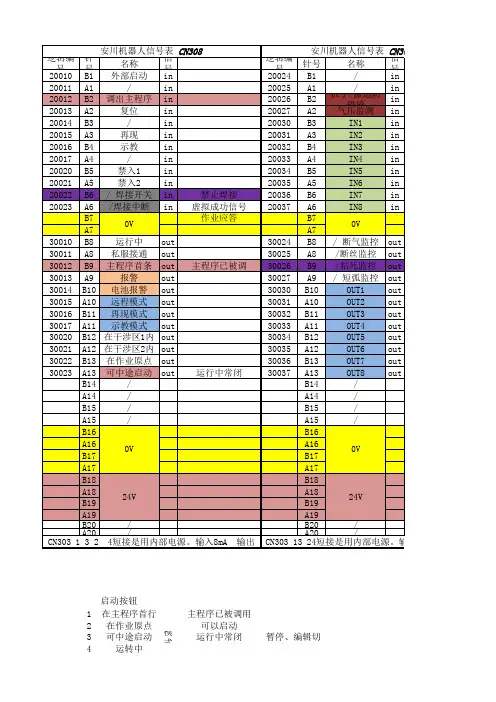
输入输出专用输入专用输出外部输入外部输出外部启动
运转中SIN#0001SOUT#000140010500102001030010伺服接通中
SIN#0002SOUT#000240011500112001130011调出主程序主程序首条SIN#0003SOUT#000340012500122001230012清除报警、错误
发生报警、错误
SIN#0004SOUT#000440013500132001330013电池报警
SIN#0005SOUT#000540014500142001430014再现模式的选择当前远程模式SIN#0006SOUT#000640015500152001530015示教模式的选择
(优先)
当前再现模式SIN#0007SOUT#000740016500162001630016当前示教模式
SIN#0008SOUT#000840017500172001730017禁止进入干涉区1立方体干涉区1内SIN#0009SOUT#000940020500202002030020禁止进入干涉区2立方体干涉区2内SIN#0010SOUT#001040021500212002130021禁止作业(禁止接通工具ON)作业原点(立方体
32、64内)
SIN#0011SOUT#001140022500222002230022作业响应
可中途启动
SIN#0012SOUT#001240023500232002330023禁止进入干涉区3立方体干涉器3内SIN#0013SOUT#001340024500242002430024禁止进入干涉区4立方体干涉区4内SIN#0014SOUT#001440025500252002530025碰撞传感器粘丝监控SIN#0015SOUT#001540026500262002630026气压低
断弧监控
SIN#0016
SOUT#0016
40027
50027
20027
30027
组号
组号输入输出通用输入通用输出外部输入外部输出IN#0001OT#000100010100102003030030IN#0002OT#000200011100112003130031IN#0003OT#000300012100122003230032IN#0004OT#000400013100132003330033IN#0005OT#000500014100142003430034IN#0006OT#000600015100152003530035IN#0007OT#000700016100162003630036IN#0008OT#000800017100172003730037IN#0009OT#000900020100202004030040IN#0010OT#001000021100212004130041IN#0011OT#001100022100222004230042IN#0012OT#001200023100232004330043IN#0013OT#001300024100242004430044IN#0014OT#001400025100252004530045IN#0015OT#001500026100262004630046IN#0016OT#001600027100272004730047IN#0017OT#001700030100302005030050IN#0018OT#001800031100312005130051IN#0019OT#001900032100322005230052IN#0020OT#002000033100332005330053IN#0021OT#002100034100342005430054IN#0022OT#002200035100352005530055IN#0023OT#002300036100362005630056IN#0024
OT#0024
00037
10037
20057
30057安川机器人信号IO对照表
内部继电器外部IO
内部继电器编号外部IO编号IGH#006OGH#006
命令内部编号
OGH#002
IG#003OG#003
IG#002OG#002
命令内部编号
注释
IG#001OG#001
IGH#001
OGH#001
IGH#002IGH#003OGH#003
IGH#004OGH#004
IGH#005OGH#005
组号
组号输入输出通用输入通用输出外部输入
外部输出IN#0025OT#002500040100402006030060IN#0026OT#002600041100412006130061IN#0027OT#002700042100422006230062IN#0028OT#002800043100432006330063IN#0029OT#002900044100442006430064IN#0030OT#003000045100452006530065IN#0031OT#003100046100462006630066IN#0032OT#003200047100472006730067IN#0033OT#003300050100502007030070IN#0034OT#003400051100512007130071IN#0035OT#003500052100522007230072IN#0036OT#003600053100532007330073IN#0037OT#003700054100542007430074IN#0038OT#003800055100552007530075IN#0039OT#003900056100562007630076IN#0040OT#004000057100572007730077IN#0041OT#004100060100602008030080IN#0042OT#004200061100612008130081IN#0043OT#004300062100622008230082IN#0044OT#004400063100632008330083IN#0045OT#004500064100642008430084IN#0046OT#004600065100652008530085IN#0047OT#004700066100662008630086IN#0048OT#004800067100672008730087IN#0049OT#004900070100702009030090IN#0050OT#005000071100712009130091IN#0051OT#005100072100722009230092IN#0052OT#005200073100732009330093IN#0053OT#005300074100742009430094IN#0054OT#005400075100752009530095IN#0055OT#005500076100762009630096IN#0056OT#005600077100772009730097IN#0057OT#005700080100802010030100IN#0058OT#005800081100812010130101IN#0059OT#005900082100822010230102IN#0060OT#006000083100832010330103IN#0061OT#006100084100842010430104IN#0062OT#006200085100852010530105IN#0063OT#006300086100862010630106IN#0064OT#006400087100872010730107IN#0065OT#006500090100902011030110IN#0066OT#006600091100912011130111IN#0067OT#006700092100922011230112IN#0068OT#006800093100932011330113IN#0069OT#006900094100942011430114IN#0070OT#007000095100952011530115IN#0071OT#007100096100962011630116IN#0072OT#007200097100972011730117IN#0073OT#007300100101002012030120IN#0074OT#007400101101012012130121IN#0075OT#007500102101022012230122IN#0076OT#007600103101032012330123IN#0077OT#007700104101042012430124IN#0078OT#007800105101052012530125IN#0079OT#007900106101062012630126IN#0080
OT#0080
00107
10107
20127
30127
IG#005OG#005
IGH#007OGH#007
IG#004OG#004
命令内部编号
内部继电器外部IO
IG#006OG#006
IG#007OG#007
IG#008OG#008
IG#009OG#009
IG#010OG#010
IGH#008OGH#008
IGH#009OGH#009
IGH#010OGH#010
IGH#011OGH#011
IGH#012OGH#012
IGH#013OGH#013
IGH#019OGH#019
IGH#014OGH#014
IGH#015OGH#015
IGH#016OGH#016
IGH#020OGH#020
IGH#017OGH#017
IGH#018OGH#018。