利用线阵 CCD 进行物体外形尺寸的测量
- 格式:docx
- 大小:2.96 MB
- 文档页数:34

实验5 线阵 C CD 应用实验电荷耦合器件(Charge coupled devices)是70年代初期发现的新型集成光电传感器件。
它有线阵列与面阵列两种基本类型,各有不同的工作原理与特性。
它们的应用为机器视觉领域的改革创新立下了汗马功劳,使机器有了获取70%以上信息的能力,加之它易于与计算机配合,使机器安装“眼睛”与“大脑”成为可能,使机器走向自动化、智能化的趋势进入现实阶段。
线阵CCD的工作原理简单,易于掌握,而它在机器视觉领域的地位举足轻重。
线阵CCD 通常用于工业领域的非接触自动检测设备上,尤其是自动化生产过程或生产线上,用作在线非接触光电检测设备或俗称为“电眼”。
非接触检测物体的尺寸、运动速度、加速度、运动规律、位置、面形、粗糙度、变形量、光学特性变化、条码信息和其他应用。
本实验共有9 项实验容,前2 项实验属于原理性或认识性实验,实验3~9 属于典型应用的实验,学生通过这些代表性的应用实验能够充分认识与理解线阵CCD 在工业领域非接触测量工作中的重要地位。
(一)线阵CCD 原理与驱动特性一、实验目的1、掌握彩色线阵CCD开发应用实验仪的基本操作和功能。
2、掌握用双踪迹示波器观测二相线阵CCD驱动脉冲的频率、幅度、周期和各路驱动脉冲之间的相位关系等测量方法。
3、通过对典型线阵CCD 驱动脉冲的时序和相位关系的观测,掌握二相线阵CCD的基本工作原理,尤其要掌握RS 复位脉冲与CR1、CR2 驱动脉冲间的相位关系,分析它对CCD输出信号的影响。
SH转移脉冲与CR1、CR2驱动脉冲间的相位关系,掌握电荷转移的几个过程。
二、实验仪器1.LCCDAD-Ⅱ-A型线阵CCD应用开发实验仪一台;2.装有VC++软件及相关实验软件的PC计算机一台;3.双踪迹同步示波器(推荐使用数字示波器,带宽应在50MHz以上)一台;三、实验容及步骤1.实验预备(1)首先将示波器的地线与实验仪上的接地线连接好,并确认示波器和实验仪的电源插头均已插入交流220V电源插座上;(2)取出双踪迹同步示波器的测试探头待用;(3)打开示波器的电源开关,选择自动测试方式(按下示波器右上角“自动设置”按钮),旋转“垂直设置”旋钮,调整显示屏上出现的扫描线处于便于观图1-1线阵CCD的参数设置界面察的位置;(4)通过USB总线将实验仪与计算机或GDS-Ⅲ实验平台的USB输入端口相连;(5)将LCCDAD-Ⅱ-A型线阵CCD应用开发实验仪的电源开关打开,红色指示灯亮;(6)启动计算机,打开桌面上的快捷方式“线阵CCD”,点击“1-LV”,弹出如图1-1所示的执行界面,点击需要设置的参数,该参数会以较大数字显示在下方,用鼠标点击“设置”,完成设置工作。
使用说明书武汉方寸科技有限公司Wuhan CCD Technology Co.Ltd线阵CCD尺寸原理(衍射法)武汉方寸(CCD)科技有限公司利用线阵CCD进行目标尺寸(含大小、高度、宽度、厚度、直径等技术指标)测量是当前高精度非接触测量以及计量检测领域中广泛应用的技术手段之一。
在工业生产和科学实验中,经常碰到微小几何尺寸的检测问题,如细丝、薄板、狭缝等,不仅费时费力,而且精度不高,不便于实时检测、显示和控制,其应用范围也受到一定的限制。
由线阵CCD传感器、光学系统、信号采集与处理构成的测量系统的使用范围和优越性是现有其它测量方法所无法比拟的。
对利用MCU进行脉冲计数法有详尽描述,可参考。
但有些特殊测量领域,比如被测件尺寸很小,或者被测件要求精度很高(如微米及以下级别等),当采用平行光源对被测件进行照射测量时,由于被测件尺寸过于微小,经过光学系统成像后,往往会发生衍射现象,会出现衍射条纹。
图1 传统线阵CCD脉冲计数法进行尺寸测量图2 夫琅和费衍射条纹根据夫琅和费衍射公式,当满足远场条件λ/2dL>>时,如图2所示,L为被测细丝到CCD靶面上的距离,d为细丝直径,λ为激光波长。
图3 利用线阵CCD进行细丝成像灰度采集与USB传输控制系统根据夫琅和费衍射公式可得到:θλsin /K d = (1)式(1)中,n K ,2,1±=,θ为被测细丝到第K 级暗纹的连线与光线主轴的夹角。
细丝经过衍射成像在CCD 靶面上成像如图2所示,当θ很小时,即L 足够大时,L X tg k /sin =≈θθ,代入式(1)得:SL K X L X L K d k k λλλ===/ (2) 其中K X S k /=,定义为暗纹周期,则测细丝直径d 转化为用线阵CCD 来测暗纹周期S 。
细丝成像后在CCD 视频信号中所形成的暗纹信号,需要经过高精度的线阵CCD 像元灰度信号采集与USB 传输控制系统,可暗纹周期信号S 经过USB2.0线阵CCD 数字相机FC-USB-L16采集传输至计算机后,在计算机判断并确定两暗纹之间的像元数s n ,则暗纹周期p n S s⋅=,其中p 为图像传感器的像元中心距(或者像元大小),代入式(2)后,即可算得细丝的尺寸大小d 。

CCD在尺寸测量方面的应用线阵CCD在尺寸测量方面的应用一、引言电荷耦合器件〔CCD〕是以电荷为信号载体的传感器,属于集成光电传感器,主要应用于光电图像的传感。
自从CCD于1970年首先在美国研制成功,它就一系列与众不同、无可比拟的优势就显示出来:灵敏度高、几何尺寸精确、光谱响应宽、动态范围大、操作容易、维护方便等。
一般说来,CCD输出信号有以下几个特点:(1)能够输出与光像位置相对应的时序信号。
(2)能够输出各个脉冲彼此独立相间的模拟信号。
(3)能够输出反映焦点面信息的信号。
我们将光源、光学系统与这三个特点相结合,可以实现尺寸的测量。
而尺寸的测量在一些场合时非常有必要的,特别是高精度尺寸测量。
在工业生产和科学实验中,经常碰到微小尺寸的检测问题,如细丝、薄板、狭缝等,不仅费时费力,而且精度较低,不便于实时检测、显示和控制,其应用范围也受到一定的限制⋯。
近年来,利用线阵CCD进行无接触一维测量已经得到广泛应用。
线阵CCD器件具有许多优点:〔1〕非接触式,防止对所测器件的损伤。
〔2〕高速测量,动态性能好,可以测高速机械运动的物体的尺寸。
〔3〕空间分辨率高,可以实现高精度测量。
〔4〕空间自扫描可以实现量的绝对测量。
〔5〕可靠性高,可以在很恶劣的环境下工作。
〔6〕其线扫描输出的光电信号有利于其后续信号处理,便于同计算机组成高性能测控系统。
典型的CCD光电测试系统由光源、光学系统、CCD传感器、信号采集与处理电路以及后续处理系统组成。
本文将介绍几种测量不同量级尺寸的方法,可以分为微小尺寸、中尺寸、大尺寸,并且给出了信号处理方法,重点是高性能微分电路的实现和二值化过程的实现。
二、测量方法1、CCD尺寸测量系统线阵CCD由一系列等距离光电二极管构成,当目标成像在CCD光敏面上时,相应的像元上将获得一系列的光电脉冲输出。
由于光电二极管的尺寸在制作时就已经确定,所以输出脉冲的个数就代表着目标尺寸的大小,为了确定光学系统对测量尺寸的影响,通常用一个已经精确标定过的样品进行校正,也就是将标准样品经过光学系统成像在线阵CCD上,根据所占像元的数目求得该系统每一像元所对应目标尺寸的大小,再用同一系统测量未知目标时,即可根据输出信号像元的数目(脉冲个数)来确定待测目标的尺寸。

ccd测尺寸机理CCD测尺寸机理引言CCD(Charge-Coupled Device)是一种常见的光电转换器件,广泛应用于数码相机、摄像机和光谱仪等设备中。
它通过将光信号转换成电荷信号,并将这些电荷信号按照一定规律传输和读取,实现对图像的采集和处理。
本文将以CCD测尺寸机理为题,介绍CCD测尺寸的原理和方法。
一、CCD的基本结构CCD主要由感光元件和信号处理电路两部分组成。
感光元件是一种由光敏二极管构成的阵列,其数量和排列方式决定了CCD的分辨率和像素数。
信号处理电路则负责将感光元件采集到的电荷信号转换成数字信号,并进行放大、滤波和编码等处理。
二、CCD测尺寸的原理CCD测尺寸的原理是基于CCD的感光元件对光信号的敏感性。
当CCD 感光元件暴露在光线下时,光子会激发出电子,形成电荷。
而不同尺寸的物体所反射的光线强度不同,因此CCD感光元件所接收到的电荷信号也会有所差异。
在CCD测尺寸过程中,首先需要将待测物体放置在CCD感光元件的视野范围内。
然后,通过设置合适的曝光时间和增益值,使CCD感光元件能够获得足够的光信号。
接下来,利用信号处理电路对采集到的电荷信号进行放大和滤波处理,以提高信噪比和图像质量。
最后,通过对处理后的信号进行编码和解码,得到待测物体的尺寸信息。
三、CCD测尺寸的方法1. 边沿检测法边沿检测法是一种常用的CCD测尺寸方法。
它通过检测物体边沿的亮度变化来确定物体的尺寸。
首先,将待测物体与背景分离,使物体的边沿清晰可见。
然后,通过对物体边沿的亮度变化进行分析和处理,可以得到物体的尺寸信息。
2. 栅格法栅格法是一种基于CCD像素点分布的测尺寸方法。
它通过将物体映射到CCD感光元件上,并利用像素点的坐标和像素间距来计算物体的尺寸。
栅格法需要准确测量物体在CCD感光元件上的位置,以及像素点的大小和排列方式。
3. 相位法相位法是一种利用CCD感光元件对光信号相位的变化进行测尺寸的方法。
它通过测量物体反射光的相位差来确定物体的尺寸。
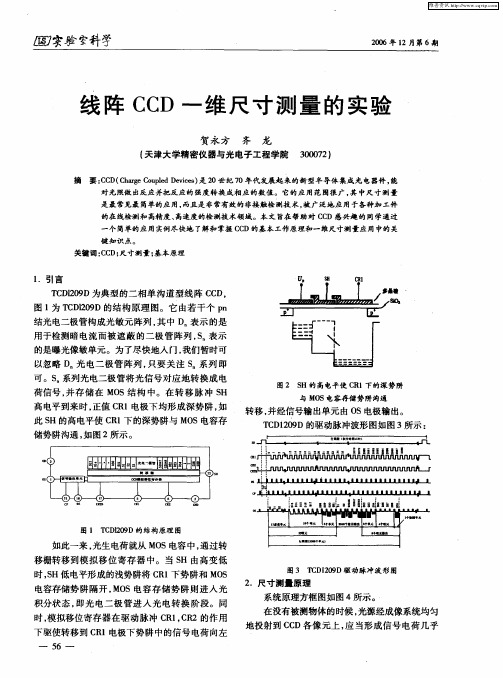
第23卷 第3期 西 安 工 业 学 院 学 报 V ol123 N o13 2003年9月 JOURNA L OF XIπAN I NSTIT UTE OF TECH NO LOGY Sept.2003基于线阵CCD的尺寸测量装置Ξ高爱华,田爱玲,赵贵波(西安工业学院光电工程学院,陕西西安710032)摘 要: 研制了用单片机系统拾取线阵CC D信号的装置,从而实现了对5~25mm内的线径尺寸的非接触测量.单片机的智能化功能使系统可以自标定,剔除了系统误差的影响.外扩计数器提高了计数频率,从而提高了系统精度.关键词: 非接触测量;线阵CC D;单片机;外扩计数器中图号: TP216 文献标识码: A 文章编号: 1000-5714(2003)03-0189-05A dimension measuring device based on line scan CCDG AO Ai-hua,TIAN Ai-ling,ZH AO Gui-bo(School of Optoelectronical Engr,X i’an Inst of T ech,X i’an710032,China)Abstract: A dimension measuring device using single-chip microcom puter based on line scan CC D is introduced.The device can achieve contactless measurement of dimension from5mm to25mm.The system can be calibrated by itself,s o system error can be eliminated.As a result of using high frequency counter circuit the instrument can achieve higher accuracy.K ey Words: contactless measurement;line scan charge coupled device;single-chip microcom puter;expanding counter在一般应用场合,一维尺寸的测量是采用接触方式完成的,如利用游标卡尺测量工件尺寸.但在一些特殊场合,接触式测量并非合适,如连续运行的生产线上;一些环境恶劣或被测对象材料不允许接触的场合,这时就要考虑用非接触手段完成测量.CC D(Charge C oupled Device)是目前图像处理、非接触尺寸测量领域的研究热点之一.CC D具有许多优良特性:空间分辨率高(线阵可达7μm);具有数字扫描能力,便于和计算机、单片机结合;具有理想的“扫描”线性,尺寸重现性好,特别适用于尺寸测量、定位和成像传感等方面[1].1 测量原理Ξ收稿日期:2002-11-27基金项目:陕西省自然科学基金(2001C55)作者简介:高爱华(1967-),女(汉),西安工业学院副教授,从事光电仪器的开发与应用研究. 被测物体被均匀照明后,经光学系统按一定倍率成像(影像反映了被测件的尺寸)在CC D 的光敏面上,CC D 器件把光敏面上工件影像的光学信息转换成与光强成正比的电荷量.用一定频率的时序脉冲驱动CC D ,在CC D 输出端获得被测件的视频信号.视频信号中每一个离散电压信号的大小对应着该光敏元所接收光强的强弱,信号输出的时序则对应光敏元位置的顺序.对视频信号进行二值化处理后,得到矩形波的宽度即与被测工件的一维尺寸成正比[2].再用单片机系统对与尺寸成正比的矩形波进行测量、处理、即可显示被测件的尺寸.系统的原理方框图如图1所示.CC D 工作脉冲、CC D 复位脉冲、视频信号和二值化信号对应关系如图2所示. 图1 线阵CCD 测一维尺寸原理方框图 图2 各脉冲波形的对应关系Fig.1 Schematic diagram of dimension measuring based on line scan CCD Fig.2 Relation between several pulse waves 2 光学系统的选择CC D 像敏元上所成像的稳定性与准确性对系统精度影响很大[3].这就要求光学系统成像好、杂散光少、像面照度分布均匀、成像几何畸变小.我们选用氦-氖激光器作为光源,激光的最大特点是方向性好.将激光器发出的细束激光扩束、准直后可直接作为测量用光源.外购CC D 自带驱动电路,成像系统采用与CC D 标准接口的成像物镜.选择物镜主要应该考虑物镜的像场大小,应根据CC D 的像面尺寸选择合适的物镜,使被测尺寸部分能完全对称地成像于CC D 的像面上.物镜的焦距应根据测量范围、物距远近来确定,焦距越短、视场越大、检测目标尺寸越大,但检测精度随之降低.3 电路部分CC D 的视频信号经二值化处理后,转变成矩形波信号,矩形波的宽度直接与被测尺寸对应,用标准脉冲(CC D 的复位脉冲2MH z )对矩形波进行填充计数,对计数值进行处理可以直接得到尺寸值,然后用数码管显示输出.键盘可以用来设定标定系数,以消除系统误差的影响.填充计数的频率越高,同样宽度的矩形波所计数值越大,测量精度越高.而51系列单片机本身虽然具有定时/计数功能,但是单片机的最高计数频率是其晶振频率的1/24,若晶振91 西 安 工 业 学 院 学 报 第23卷频率为6MH z ,那么所允许的最大计数频率仅为6/24MH z ,所以我们扩展8254接口芯片作为专门计数用,8254计数频率最高为10MH z [4],可以满足要求.填充计数脉冲选用CC D 自带的2MH z 的复位脉冲.8254与AT 89C51的连接如图3.8254由软件编程写入控制字启动计数,二值化信号同时接8254的G ATE0与AT 89C51的外部中断零I NT 0.计数器选择工作方式2,当G ATE0有正跳变时,启动计数,在高电平期间计数;G ATE0由高电平跳低电平时,禁止计数,同时向CPU 申请中断,由中断完成读数等功能.图3 计数接口扩展电路图Fig.3 Expanding counter circuit主电路部分:外扩8279作为键盘/显示管理部分,减轻了CPU 对键盘/显示管理的烦琐负担[5].8279芯片中设有先入先出栈(FIFO ),可存储8个键值,当FIFO 中有数据时,可以向CPU 发出中断申请,请求取走数据.8279的显示输出部分设有16×8bit 显示RAM ,可先指定图4 主电路部分Fig.4 Main circuit显示RAM 的地址,再对其写入或读出.另外,8279不需要再译码器,它的显示RAM 与CPU 的191第3期 高爱华等:基于线阵CC D 的尺寸测量装置 数据相对,直接由软件译码,这样可以显示许多其他的字符.主电路部分如图4所示.中断I NT 0用作读计数值、数据处理等.中断I NT 1用作键盘处理.减轻了CPU 的负担.4 软件部分由于8279具有自扫描功能,所以不必编写去抖动及查找键程序,使得整个程序很简练.整个软件主要包括系统初始化、计数中断、键盘中断、显示、数字滤波、系统标定、进制转换等部分.主程序流程图见图5所示.图5 主程序流程图Fig.5 Flow chart of the main program 5 系统精度与测量数据分析系统将CC D 信号处理后送入单片机进行处理、显示,使测量实现了智能化.装置的精度主要由光学成像系统的质量、CC D 的分辨率、二值化信号的提取、计数频率的高低等决定.(1)测量时,若CC D 感光面与像面不重合,CC D 将接收到模糊的图像信息,造成测量误差.一方面选用激光照明,另外精密测量的场合可以增加瞄准部分来解决;(2)二值化处理后的信号直接与被测尺寸对应,二值化处理方法中最关键的问题是图像边缘特征点的确立,即阀值电平的取值问题,阀值电平设置的高低不同,经变换得到的图像边缘出入很大,跟被测对象的实际值相差较大,但由于每一个阀值电平都唯一地对应着一个特征点,所以这种误差可以看作是系统误差,通过标定的方法可以解决,因此二值化处理法的精度是能够得到一定保障的;(3)计数频率越高,尺寸信息细分越好,精度越高.可以通过外扩计数部分解决了这个问题.用游标卡尺测得标准件1,2,3的值分别为9.4mm ,12.6mm ,16.8mm.用该系统测量结果见下表1所示.表1中偏差δi =x i -x ,其中x i (i =1,2,3,4,5,6)为测量值,x 为真值(此处用游标卡尺测得值代替),标准差σ[6]为∑6i =1δi 26.由表1可见,检测目标尺寸越大,焦距越短、视场越大,检测精度随之降低.实验过程中发现,光学系统的准确调节对测量误差影响较大,整个实验是在光基座上完成,激光器发出的激光经扩束、准直后应垂直照射到CC D 的感光面上,即CC D 的接受面应与光轴垂直,使成像清晰,另外调焦不准,也会造成成像模糊,表1是在对光学系统经过反复调291 西 安 工 业 学 院 学 报 第23卷节对准后得到的测量结果.表1 不同尺寸的标准件测量结果T ab.1 Measurement results of different standard w orkpieces序号显示值/mm (标准件1)偏差δ/mm 显示值/mm (标准件2)偏差δ/mm 显示值/mm (标准件3)偏差δ/mm 19.3-0.112.3-0.316.4-0.429.1-0.312.2-0.416.3-0.539.2-0.212.4-0.216.1-0.749.5+0.112.9+0.317.3+0.559.4012.8+0.217.2+0.469.3-0.112.2-0.416.3-0.5平均值9.3标准差0.16平均值12.5标准差0.31平均值16.6标准差0.516 结论外购CC D 仅用了1024像元、14mm 成像区,使光学部分的测量精度受到影响.若将光学成像系统设计到同一基座上,并增加瞄准系统,可以确保成像清晰准确.电路部分由于采用提高计数频率、双字节运算、用软件剔除系统误差等措施使装置精度有所提高,本装置适用于低成本、精度要求不高的非接触测量场合.参考文献:[1] 王庆有,孙学珠.CC D 应用技术[M].天津:天津大学出版社,1993[2] 郭华,邵向东,杨淑华.CC D 输出信号的电处理方法[J ].传感器技术,1999,18(1):39[3] 达争尚,施浣芳.线阵CC D 尺寸测量信号的提取[J ].西安工业学院学报,2000,20(1):35[4] 吴产乐.微机系统与接口技术[M].武汉:华中科技大学出版社,2002[5] 李朝清.单片机原理及接口技术[M].西安:西安电子科技大学出版社,2000[6] 费业泰.误差理论与数据处理[M].北京:机械工业出版社,1998391第3期 高爱华等:基于线阵CC D 的尺寸测量装置 。
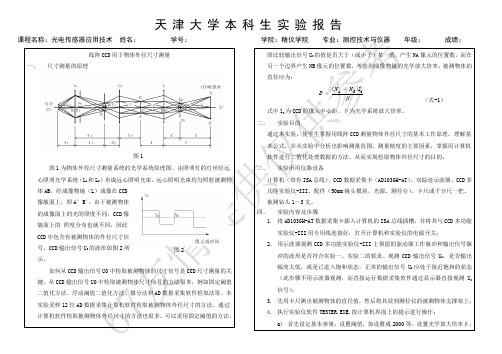
实验十二利用线阵C CD 进行物体外形尺寸的测量一、实验目的通过本实验掌握利用线阵C CD 进行非接触测量物体尺寸的基本原理和方法,用实例探讨影响测量范围、测量精度的主要因素,为今后设计提供重要依据。
二、实验准备内容1. 利用线阵C CD 进行非接触测量物体尺寸的基本原理线阵C CD 的输出信号包含了C CD 各个像元所接收光强度的分布和像元位置的信息,使它在物体尺寸和位置检测中显示出十分重要的应用价值。
CCD 输出信号的二值化处理常用于物体外形尺寸、物体位置、物体震动(振动)等的测量。
如图3-1 所示为测量物体外形尺寸(例如棒材的直径D)的原理图。
将被测物体 A 置于成像物镜的物方视场中,将线阵C CD 像敏面恰好安装在成像物镜的最佳像面位置上。
当被均匀照明的被测物体A通过成像物镜成像到C CD 的像敏面上时,被测物体像黑白分明的光强分布使得相应像敏单元上存储载荷了被测物尺寸信息的电荷包,通过C CD 及其驱动器将载有尺寸信息的电荷包转换为如图3 -1右侧所示的时序电D = D' / β显然,只要求出D' ,就不难测出物体A的实际尺寸D。
(3-1)线阵CCD 的输出信号U O 随光强的变化关系为线形的,因此,可用U O 模拟光强分布。
采用二值化处理方法将物体边界信息(图3-1 中的N1 与N2)检测出来是简单快捷的方法。
有了物体边界信息便可以进行上述测量工作。
2. 二值化处理方法图3-2 所示为典型CCD 输出信号与二值化处理的时序图。
图中F C 信号为行同步脉冲,FC 的上升沿对应于C CD 的第一个有效像元输出信号,其下降沿为整个输出周期的结束。
U G 为绿色组分光的输出信号,它为经过反相放大后的输出电压信号。
为了提取图3-2 所示U G 的信号所表征的边缘信息,采用如图3-3 所示的固定阈值二值化处理电路。
该电路中,电压比较器 L M393 的正输入端接 C CD 的输出信号 U G ,而反相输入端接到由 电位器 R 2 的动端,产生的可调的阈值电平,可以通过调节电位器对阈值电平进行设置, 构成固定阈值二值化电路。
经固定阈值二值化电路输出的信号波形被定义为 T H ,它为方 波脉冲。
再进行逻辑处理,便可以提取出物体边缘 的位置信息 N 1 和 N 2。
N 1 与 N 2 的差值即为被测 物体在 CCD 像面上所成图像占据的像元数目。
物体 A 在像方的尺寸 D ' 为D ' = (N - N )L(3-2)21式中,N 1 与 N 2 为边界位置的像元序号,L 0 为 CCD 像敏单元的尺寸。
因此,物体的外径 D 应为图 3-3 二值化电3. 二值化处理电路原理方框图D =(N 2 - N 1 )L 0β(3-3)二值化处理原理图如图 3-4 所示,若与门的输入脉冲 CR t 为 CCD 驱动器输出的采 样脉冲 S P,则计数器所计的数为(N2-,锁存器锁存的数为(N2-,将其差值送 入(N 2-N 1)LED 数码显示器,则显示出(N 2-N 1)值。
同样,该系统适用于检测物体的位置和它的 运动参数,设图 3-1 中物体 A 在物面沿着光轴做 垂直方向运动,根据光强分布的变化,同样可以 计算出物体 A 的中心位置和它的运动速度、震 动(振动)等。
三、实验所需仪器设备1、 L CCDAD-Ⅱ-A 型线阵 C CD 应用开发实验仪一台;2、 装有 V C++软件及相关实验软件的 P C 计算机或 G DS-Ⅲ型光电综合实验平台一 台; 四、实验内容及步骤 1.实验内容(1)建立非接触测量物体外形尺寸的基本结构; (2) 观测二值化处理过程中 C CD 的输出信号; (3) 在进行二值化阈值电平调整的过程中,观察阈值电平的调整对测量值的影响; (4) 进行光学系统放大倍率的标定; (5) 进行非接触测量被物体外形尺寸的测量;(6) 通过改变有关参数,观察对测量值的影响,分析影响物体尺寸测量的主要因 素。
2.实验步骤(一)实验准备(1) 将示波器地线与实验仪上的地线连接良好,并确认示波器的电源和多功能实验仪的电源插头均插入交流220V 插座上;(2) 打开仪器上盖,旋下旋转滚筒轴上的禁锢螺钉,将旋转滚筒拿下来,使实验仪的测试台像如图3-5 所示的尺寸测量系统,然后将被测干件插入如图3-5 所示的安装位置上;图3-5 线阵C CD 应用开发实验仪(3) 打开实验仪电源开关,启动计算机,并进入物体尺寸测量软件,将在屏幕上弹出如图3-6 所示的物体外形尺寸测量实验软件界面;图3-6 所示界面中尽管标写“LCCDAD-Ⅱ”字样,照样适用于“LCCDAD-Ⅱ-A 型”实验仪。
其中“打开”菜单是为打开原来曾保(二)光学成像系统放大倍率β的标定(1)将直径为5mm 的“试件”插入安装装置,执行“物体尺寸测量实验”软件,弹出如图3-6 所示的测量尺寸软件界面;同时远心照明光源被点亮;(2)在尺寸软件界面上选中“连续扫描”菜单,计算机显示器出现含有被测“试件” 外径尺寸信息的波形如图 3-7 所示;(3)在测量界面上设置驱动频率或积分时间,使输出信号的幅度在适宜观测的程度, 但是,一定不要使 C CD 工作到饱和状态;(4)调整物镜的焦距使如图 3-7 所示输出信号曲线的斜率尽量陡;图 3-7 尺寸测量软件界面(5) 停止采集后,界面进入到如图 3-8 所示的光学放大倍率的测量与设定软件界面, 并在界面的底部用文字方式提示实验者应该执行的步骤,如图 3-8 中提示的“请将标准棒 插入测试槽中,观察数据”,实验者应该按着提示将φ 5 的测试棒插入测试槽中。
然 后根据曲线波形调节驱动频率与积分时(6) 选择适当的阈值,二值化阈值电平的选择原则是能够检测出物体的真正外形尺寸 值。
例如,在如图 3-8 所示输出波形图上可以看出,波形幅度的一半处能够反映物体的外 形尺寸信息,此处曲线的变化率也最大,为此可以选定阈值为“127”,再执行“下一步”, 界面弹出下一步操作的提示;(7)调整光学成像系统的焦距与光圈,注意观察输出信号波形,使信号波形中反映尺寸信息的变化边缘越陡成像光学系统调整得越佳,测量系统的精度越高。
调整好光学系统后执行下一步;图3-8 光学放大倍率测量与设置软件界(8)在软件界面的提示下进行操作,将用卡尺或千分尺测量的标准被测物尺寸值输入到,软件自动计算出光学系统的放大如图3-9 所示的“已知值”输入框中,再执行“下一步”,便将测得倍率β并显示在新弹出如图3-10 所示的界面上;再点击“下一步”,出现点击“完成”的放大倍率存入计算机内存,为本实验的测量工作使用;实验3-9 尺寸测量实验光学系统放大比率的标定标定好光学系统放大倍率后测量系统就可以对如何安装在指定位置上的任何物体的外形尺寸进行测量实验,例如对仪器提供的3mm、8mm 棒材的外径尺寸进行测量实验。
实际的物体外形尺寸的测量仪器都需要上述的标定过程,只有经过上述标定才能够应用于 实际工程中。
图 3-10 尺寸测量系统光学放大倍率标定(9) 也可以用最原始的数据测量光学系统放大倍率,当调整好光学成像系统的焦距 后,停止采集,选择“数据结果”菜单,察看线阵 C CD 所有单元的数据,观察相邻两个 像元数据的变化率,将发生由大变小变化率最大处的像元序列值(位置值)记为“N 1”, 将由小变大过程中变化率最大处的像元序列值记为“N 2”,将所观察到的 N 1 与 N 2 值填入 表 3-1,重复上述过程,进行多次测量后,再将测量值代入公式(3,便可以获得光学 系统的横向放大倍率β 。
7 ∑(N i 2 - N i 1) β = i =1 7D(3-1) 式中 D 为校正所用物体的直径,测量次数根据统计理论应该是奇数次,这里取 7 次。
表 3-1 光学放大倍率 β 的测量、非接触测量物体的外形尺寸(1)保持上述设置不变,取下测量光学系统放大倍率标准件,装上其他尺寸的被测件, 盖上盖。
连续记下 10 组数据,填入表 3-2,计算出被测件的实际尺寸。
改变积分实间和二值化阈值电平继续测量物体尺寸,观察、分析测量条件对测量结果的影响,为此先调出二值化实验软件(2)将阈值电平的二进制数值设为98,测量出物体直径的一组相关数据,填入表3-2,计算出被测杆件的直径D。
(3)再调整阈值至127,测量一组数据,填入表3-2,计算出被测杆件的直径,观察阈值电平改变前、后被测杆件直径值的变化。
(4)若调整阈值调至150,再测量一组数据,计算出被测杆件的直径,观察阈值电平改变前、后被测杆件直径值的变化。
(5)改变积分时间后,再重复上述实验,观察C CD 输出信号波形的变化,同时纪录测量值的变化。
(6)当线阵C CD 开始出现饱和状态后,再观测被测物尺寸的变化情况,进入深度饱和后测量结果有何变化?表3-2 被测件外径的测量上述实验完成,并达到实验目的,便可结束实验。
(1)将软件程序退出,再关闭计算机系统;(2)关闭实验仪的电源;(3)将总电源关闭;(4)将实验仪器及其用具收拾好,工具放到指定位置;(5)将所做实验数据交于实验指导老师审查,合格后方可离开实验室。
四、实验总结1、写出实验总结报告,解释为何两种阈值下测量结果有差异,造成这种差异的原因有几点。
2、固定阈值二值化测量方法有什么优点?其缺点又是什么?为什么在野外测量时一定要采用浮动阈值二值化测量方法?3、你能设计硬件浮动阈值二值化测量的具体电路吗?4、积分时间的变化是否对测量值有影响?在什么时候会有影响?为什么进行尺寸测量时必须使C CD 脱离饱和区?5、如果线阵C CD 的工作已经进入饱和工作状态,试问上述实验测得的结果会如何变化?附录一 TCD2252D 手册TCD2252D 是一种高灵敏度、低暗电流、2700 像元的内置采样保持电路的彩色线阵 CCD 图像传感器。
该传感器可用于彩色传真、彩色图像扫描和 O CR 。
它内部包含 3 列 2700 像元的光敏二极管。
该器件工作在 5V一、 结构特点:TCD2252D 具有以下一些结构特点:1、 像敏单元数目:具有 3 行三原色 R 、G 、B 并行的像元阵列,每行均为 2700 像元;2、 像敏单元尺寸为: 883、 光敏区域:每像敏单元均采用高灵敏度、低暗电流的 P N 结工艺制造而成;4、 相邻两光敏阵列之间距:64μm ;5、 驱动脉冲:0~5V 的二相脉冲,内部具有采样保持电路、箝位电路和电平转移电 路;6、 封装形式:22 脚 W DIP22-G-400-2.54A 封装; 二、特性参数: 如表 F B1-1 所示为 T CD2252D 器件的各项特性参数,其测试条件为:环境温度为室 温 Ta =25℃,电源电压V OD =12V ,驱动脉冲高电平为 V CR =V RS =V SH = 5V ,驱动频率为 f CR=0.5MHZ ,复位脉冲频率为 f RS =1MHZ ,积分时间为 t INT =10ms ,输入阻抗 = 100K Ω , 光源为 A 光源+CM500S 滤光片的情况下测得的各项参数。