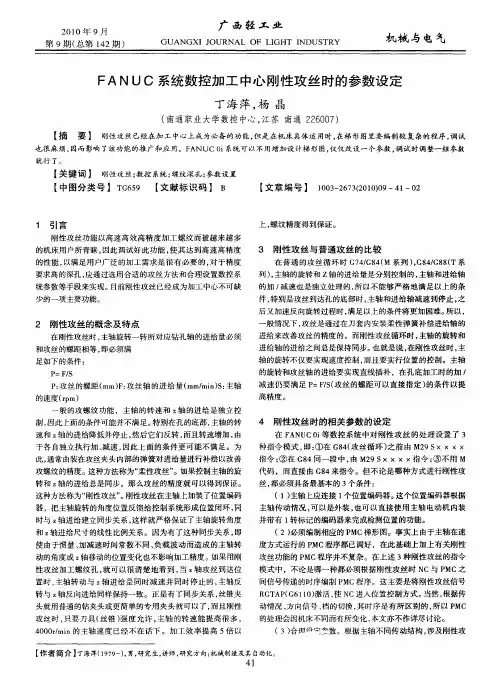
FANUC设定参数实现刚性攻丝
- 格式:doc
- 大小:27.00 KB
- 文档页数:5
FANUC系统刚性攻丝功能详解首先,刚性攻丝功能是指机器人在进行攻丝操作时,能够保持稳定的力和位置控制。
这意味着机器人可以根据既定的程序在工件表面上产生高质量的螺纹。
这种功能对于需要精确控制螺纹深度、螺距和螺纹形状的应用非常重要。
刚性攻丝功能的实现主要依赖于FANUC系统的硬件和软件设计。
FANUC系统使用高性能的力传感器和位置传感器来实时监测机器人与工件之间的力和位置信息。
这些传感器能够提供高分辨率和高精度的测量结果,从而保证机器人的稳定性和准确性。
在软件方面,FANUC系统提供了一套完整的攻丝控制算法。
这些算法对机器人的运动进行实时的力和位置调整,以实现精确的攻丝操作。
例如,在攻丝过程中,系统可以根据传感器信息实时调整机器人的速度和力度,以适应工件表面的不均匀性和材料特性。
此外,FANUC系统还提供了丰富的控制参数和设置选项,以满足不同应用的需求。
用户可以根据具体的攻丝要求进行调整,包括螺纹深度、起刀点位置、进给速度等等。
这些参数的灵活调整使得FANUC系统能够适应各种不同的攻丝操作,从而提高生产效率和质量。
最后,FANUC系统的刚性攻丝功能还具备一定的智能化特性。
系统可以通过学习和优化算法,自动适应不同材料和工件的攻丝过程。
它能够根据历史数据分析出最佳的攻丝参数和路径,从而提高攻丝的效率和质量。
总结起来,FANUC系统的刚性攻丝功能通过高性能的传感器、智能化的控制算法以及灵活的参数调整,实现了高质量和高效率的攻丝操作。
这种功能对于提高机器人的应用范围和工作效果具有重要意义,为用户创造了更多的机会和价值。
FANUCOi 刚性攻牙参数FANUC Oi 系统开通刚性攻牙功能需要设定参数仅供参考。
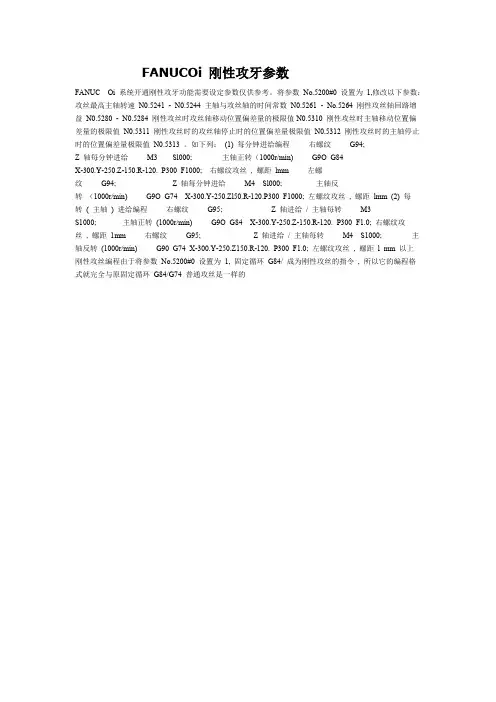
将参数 No.5200#0 设置为 1,修改以下参数:攻丝最高主轴转速 N0.5241 - N0.5244 主轴与攻丝轴的时间常数 N0.5261 - No.5264 刚性攻丝轴回路增益 N0.5280 - N0.5284 刚性攻丝时攻丝轴移动位置偏差量的极限值N0.5310 刚性攻丝时主轴移动位置偏差量的极限值 N0.5311 刚性攻丝时的攻丝轴停止时的位置偏差量极限值 N0.5312 刚性攻丝时的主轴停止时的位置偏差量极限值 N0.5313 。
如下列: (1) 每分钟进给编程右螺纹G94;Z 轴每分钟进给M3Sl000;主轴正转(1000r/min) G9O G84X-300.Y-250.Z-150.R-120. P300 F1000;右螺纹攻丝 , 螺距 lmm 左螺纹G94; Z 轴每分钟进给M4Sl000; 主轴反转(1000r/min) G9O G74X-300.Y-250.Zl50.R-120.P300 F1000; 左螺纹攻丝 , 螺距 lmm (2) 每转 ( 主轴 ) 进给编程右螺纹G95; Z 轴进给 / 主轴每转M3S1000; 主轴正转 (1000r/min) G9O G84X-300.Y-250.Z-150.R-120. P300 F1.0; 右螺纹攻丝 , 螺距 1mm 右螺纹G95;Z 轴进给 / 主轴每转M4S1000;主轴反转 (1000r/min) G90 G74 X-300.Y-250.Z150.R-120. P300 F1.0; 左螺纹攻丝 , 螺距 l mm 以上刚性攻丝编程由于将参数 No.5200#0 设置为 1, 固定循环 G84/ 成为刚性攻丝的指令 , 所以它的编程格式就完全与原固定循环 G84/G74 普通攻丝是一样的。
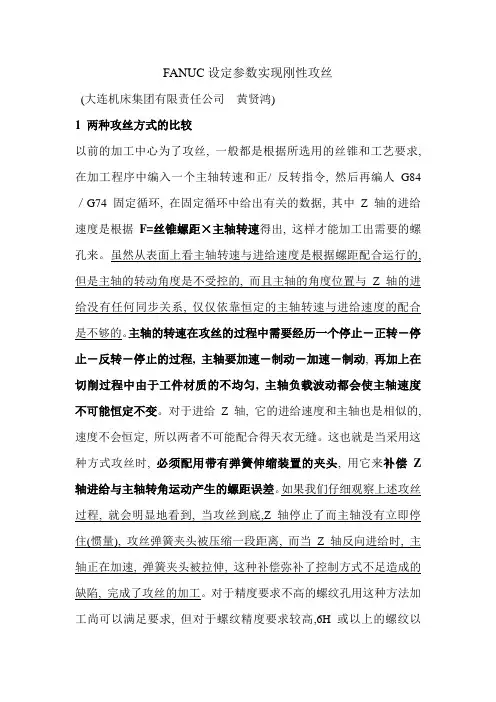
FANUC设定参数实现刚性攻丝(大连机床集团有限责任公司黄贤鸿)1 两种攻丝方式的比较以前的加工中心为了攻丝, 一般都是根据所选用的丝锥和工艺要求, 在加工程序中编入一个主轴转速和正/ 反转指令, 然后再编人G84 /G74 固定循环, 在固定循环中给出有关的数据, 其中Z 轴的进给速度是根据F=丝锥螺距×主轴转速得出, 这样才能加工出需要的螺孔来。
虽然从表面上看主轴转速与进给速度是根据螺距配合运行的, 但是主轴的转动角度是不受控的, 而且主轴的角度位置与Z 轴的进给没有任何同步关系, 仅仅依靠恒定的主轴转速与进给速度的配合是不够的。
主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程, 主轴要加速-制动-加速-制动, 再加上在切削过程中由于工件材质的不均匀, 主轴负载波动都会使主轴速度不可能恒定不变。
对于进给Z 轴, 它的进给速度和主轴也是相似的, 速度不会恒定, 所以两者不可能配合得天衣无缝。
这也就是当采用这种方式攻丝时, 必须配用带有弹簧伸缩装置的夹头, 用它来补偿Z 轴进给与主轴转角运动产生的螺距误差。
如果我们仔细观察上述攻丝过程, 就会明显地看到, 当攻丝到底,Z 轴停止了而主轴没有立即停住(惯量), 攻丝弹簧夹头被压缩一段距离, 而当Z 轴反向进给时, 主轴正在加速, 弹簧夹头被拉伸, 这种补偿弥补了控制方式不足造成的缺陷, 完成了攻丝的加工。
对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求, 但对于螺纹精度要求较高,6H 或以上的螺纹以及被加工件的材质较软(铜或铝) 时, 螺纹精度将不能得到保证。
还有一点要注意的是, 当攻丝时主轴转速越高,Z 轴进给与螺距累积量之间的误差就越大, 弹簧夹头的伸缩范围也必须足够大, 由于夹头机械结构的限制, 用这种方式攻丝时, 主轴转速只能限制在600r/min 以下。
刚性攻丝就是针对上述方式的不足而提出的, 它在主轴上加装了位置编码器, 把主轴旋转的角度位置反馈给技控系统形成位置闭环, 同时与Z 轴进给建立同步关系, 这样就严格保证了主轴旋转角度和Z 轴进给尺寸的线生比例关系。
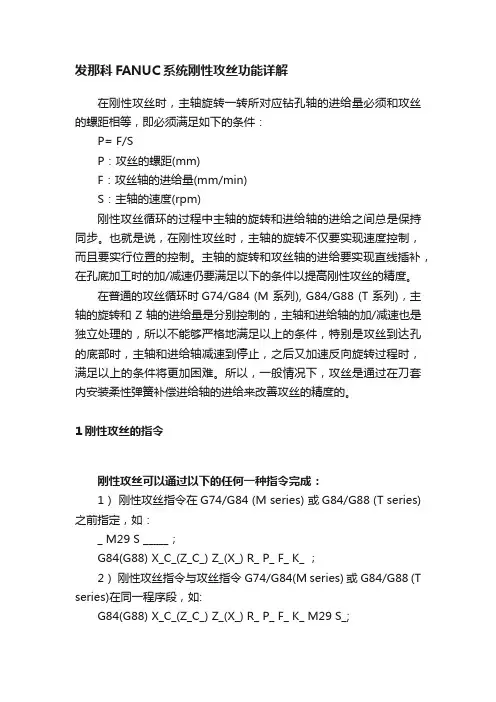
发那科FANUC系统刚性攻丝功能详解在刚性攻丝时,主轴旋转一转所对应钻孔轴的进给量必须和攻丝的螺距相等,即必须满足如下的条件:P= F/SP:攻丝的螺距(mm)F:攻丝轴的进给量(mm/min)S:主轴的速度(rpm)刚性攻丝循环的过程中主轴的旋转和进给轴的进给之间总是保持同步。
也就是说,在刚性攻丝时,主轴的旋转不仅要实现速度控制,而且要实行位置的控制。
主轴的旋转和攻丝轴的进给要实现直线插补,在孔底加工时的加/减速仍要满足以下的条件以提高刚性攻丝的精度。
在普通的攻丝循环时G74/G84 (M 系列), G84/G88 (T 系列),主轴的旋转和Z轴的进给量是分别控制的,主轴和进给轴的加/减速也是独立处理的,所以不能够严格地满足以上的条件,特别是攻丝到达孔的底部时,主轴和进给轴减速到停止,之后又加速反向旋转过程时,满足以上的条件将更加困难。
所以,一般情况下,攻丝是通过在刀套内安装柔性弹簧补偿进给轴的进给来改善攻丝的精度的。
1刚性攻丝的指令刚性攻丝可以通过以下的任何一种指令完成:1)刚性攻丝指令在G74/G84 (M series) 或G84/G88 (T series)之前指定,如:_ M29 S _____;G84(G88) X_C_(Z_C_) Z_(X_) R_ P_ F_ K_ ;2)刚性攻丝指令与攻丝指令G74/G84(M series) 或G84/G88 (T series)在同一程序段,如:G84(G88) X_C_(Z_C_) Z_(X_) R_ P_ F_ K_ M29 S_;3) G74/G84 (M series) 或G84/G88 (T series) 作为刚性攻丝指令G84X_Y_Z_R_P_F_K_;为标准攻丝循环指令G74X_Y_Z_R_P_F_K_;为反螺纹攻丝循环指令刚性攻丝有两种方式:每转进给刚性攻丝(G99)和每分进给刚性攻丝(G98)。
下例为每转进给刚性攻丝方式(G99)。

关于FANUC—Oi加工中心钢性攻丝肇庆汇隆(2000转以上)高速攻丝刚开始丛200转速以下可以攻丝,要一下提到2000转来攻丝。
一:钢性攻丝它的原理:P=F/SP:螺距F:z轴的进给S:主轴的转速丛以上的工式可以看出,在攻丝时P要恒定,关键是F和S的比一定要保持不变才能达到攻丝的要求。
所以也要z轴和主轴保持同步。
分析一下:只要主轴和z 轴都同时到达所要求的转速和进给速度的话,攻丝就没什么问题。
所以我们就着重围绕着他的参数来修改。
我们再来了解一下关于它的参数:NIZ=0 时不进行攻丝平滑处理NIZ= 1时进行攻丝平滑处理* TDR:钢性攻丝中的切削时间常数选择。
TDR =0时进退刀的时间常数用一样的参数(NO.5261~NO.5264)机床最终修改为TDR =0TDR=1时用进退刀时的时间常数用不一样的参数进刀时用(NO.5261~ NO.5264)退刀时用(NO.5271~ NO.5274)DGN=0时诊断453显示主轴和z轴的最大误差=1时诊断 450 显示主轴和z轴的同步误差NO.5310NO.5310=32767 :攻丝时位置偏差极限值。
在攻丝前放到最大。
有可能出现ALM 200NO.5261~~NO.5263:为进退刀加减速时间常数。
(在NO。
5201#2=0时)刚开始的参数都=100 (机床的出厂设置)NO.5261~~NO.5263=100:在这它等于100时没有试过,但它的出厂是按200转/分钟转速调攻丝的。
(会因转速过高而乱牙)它的最终调节为300插曲:FANUC公司来人用PC机跟踪同步脉冲调整它为NO.5261~~NO.5263=3000,所出现的问题是:例: 用程序1200转/分钟的主轴转速,攻M4*20的牙,主轴转速没有到1000就又开始减速了,攻丝的时间就变长了很多。
不过它的同步误差只有一两个脉冲。
调机一:开始马师傅就把NO.5300 z轴到位宽度 NO.5301主轴到位宽度都调到了20NO.5300和NO.5301它是一个精度的参数。
基于Fanuc Servo Guide软件的刚性攻丝参数设定与调整张丽;朱强【摘要】为了解决零件加工中心在刚性攻丝时螺纹乱牙的问题,通过Fanue Servo Guide软件的联机测试,对系统参数进行设定与调整,以达到高速高精加工螺纹的目的.经实际运用,该实施方案可靠性强,对工程实践应用具有一定的参考价值.【期刊名称】《重庆科技学院学报(自然科学版)》【年(卷),期】2015(017)006【总页数】3页(P94-96)【关键词】刚性攻丝;Fanuc Servo Guide;参数设定【作者】张丽;朱强【作者单位】芜湖职业技术学院机械工程学院,安徽芜湖241006;芜湖职业技术学院机械工程学院,安徽芜湖241006【正文语种】中文【中图分类】TH161在零件加工中,螺纹加工应用十分广泛。
数控机床的刚性攻丝功能具有高速、高效的特点,特别是其能够加工深孔螺纹的优势越来越得到用户的认可[1-2]。
但在常规的螺纹加工中,用户按照机床说明去设置对应的系统参数时,却往往难以达到预期效果,经常会出现螺纹乱牙现象。
为了解决零件加工中心在刚性攻丝时的螺纹乱牙问题,通过Fanuc Servo Guide软件调试,分析z轴的进给速度及其同步误差,对系统参数进行优化与调整,以求实现高速高精螺纹加工。
1 刚性攻丝原理理论上,在进行螺纹加工时,当主轴旋转1转后,z轴的进给总量应该等于丝锥的螺距[3]:式中:P—丝锥的螺距,mm;F— z轴的进给量,mm/min;S—主轴转速,r/min。
由式(1)可以看出,加工时P要保持恒定,F和S的比值要保持不变才能达到攻丝的要求,z的进给要和主轴转速保持同步;如果控制主轴的转速与z轴的进给量总是保持同步,那么螺纹加工的精度就可以得到保证,这种方法称为“刚性攻丝”[4]。
刚性攻丝就是针对上述要求在机床主轴上加装位置编码器,将主轴旋转的角度位置信息反馈给数控系统形成位置闭环,同时与z轴进给建立同步关系,保证主轴旋转角度和z轴进给位移的线性比例关系[5]。
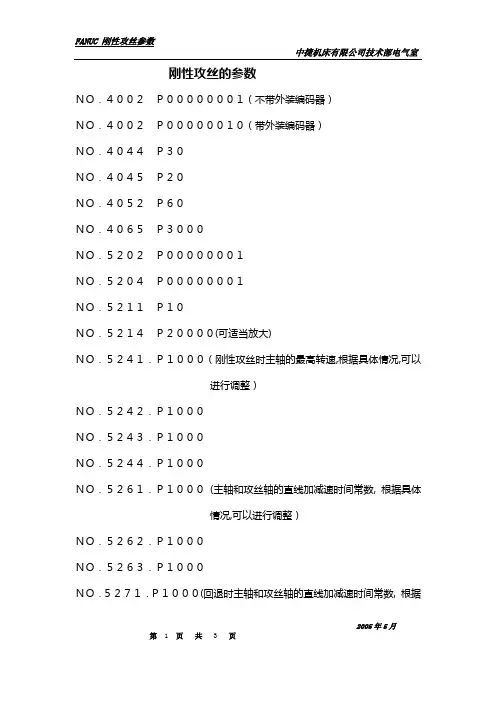
刚性攻丝的参数NO.4002P00000001(不带外装编码器)NO.4002P00000010(带外装编码器)NO.4044P30NO.4045P20NO.4052P60NO.4065P3000NO.5202P00000001NO.5204P00000001NO.5211P10NO.5214P20000(可适当放大)NO.5241.P1000(刚性攻丝时主轴的最高转速,根据具体情况,可以进行调整)NO.5242.P1000NO.5243.P1000NO.5244.P1000NO.5261.P1000(主轴和攻丝轴的直线加减速时间常数, 根据具体情况,可以进行调整)NO.5262.P1000NO.5263.P1000NO.5271.P1000(回退时主轴和攻丝轴的直线加减速时间常数, 根2005年5月据具体情况,可以进行调整)NO.5272.P1000NO.5273.P1000NO.5280.P3000(刚性攻丝时主轴和攻丝轴的位置控制回路增益, 根据具体情况, 可以进行调整)NO.5281.P0NO.5282.P0NO.5283.P0NO.5291.P2000(刚性攻丝时主轴回路增益系数, 根据具体情况, 可以进行调整)NO.5300.P50NO.5301.P50NO.5310.P10000(可适当放大)NO.5311.P10000(可适当放大)NO.5312.P300NO.5313.P300NO.5314.P5000(可适当放大)NO.5321.P10试验程序:夞2005年5月。
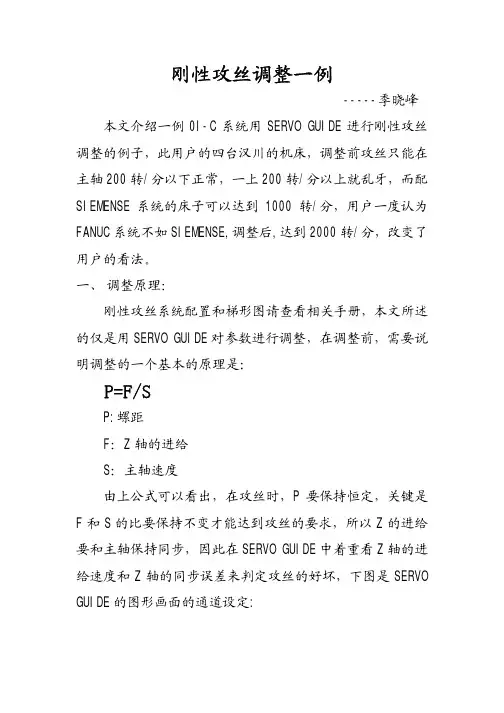
刚性攻丝调整一例-----季晓峰本文介绍一例0I-C系统用SERVO GUIDE进行刚性攻丝调整的例子,此用户的四台汉川的机床,调整前攻丝只能在主轴200转/分以下正常,一上200转/分以上就乱牙,而配SIEMENSE系统的床子可以达到1000转/分,用户一度认为FANUC系统不如SIEMENSE,调整后,达到2000转/分,改变了用户的看法。
一、调整原理:刚性攻丝系统配置和梯形图请查看相关手册,本文所述的仅是用SERVO GUIDE对参数进行调整,在调整前,需要说明调整的一个基本的原理是:P=F/SP:螺距F:Z轴的进给S:主轴速度由上公式可以看出,在攻丝时,P要保持恒定,关键是F和S的比要保持不变才能达到攻丝的要求,所以Z的进给要和主轴保持同步,因此在SERVO GUIDE中着重看Z轴的进给速度和Z轴的同步误差来判定攻丝的好坏,下图是SERVO GUIDE的图形画面的通道设定:二、调整过程:1、调整前参数设定:3700#5=1(输出Z轴同步误差SYNC)5204#0=1(显示DGN453:主轴和Z轴最大误差)=0 (显示DGN450:主轴和Z轴瞬时误差)5210-5312=32767:攻丝时位置偏差极限值,攻丝前放到最大值32767,否则会报ALM 7405241-5244=2000:攻丝主轴最高转速,SERVO GUIDE调试程序默认2000转/分,太小会报ALM 200。
2、调整目标:DGN453=1DGN450<200,当然越小越好。
3、调整过程(空运行,S=2000转/分):1)调整前,攻丝只能在主轴200转以下正常,一上200转以上就乱牙,用户其它床子用SIEMENSE系统的都在1000转以上正常攻丝,当时用SERVO GUIDE一联机发现Z轴的同步误差过大,如下图:2)调整位置增益:发现攻丝时主轴和Z轴的公共位置环增益5280和主轴位置环增益4065-4068不一致,此两个增益一定要一致。

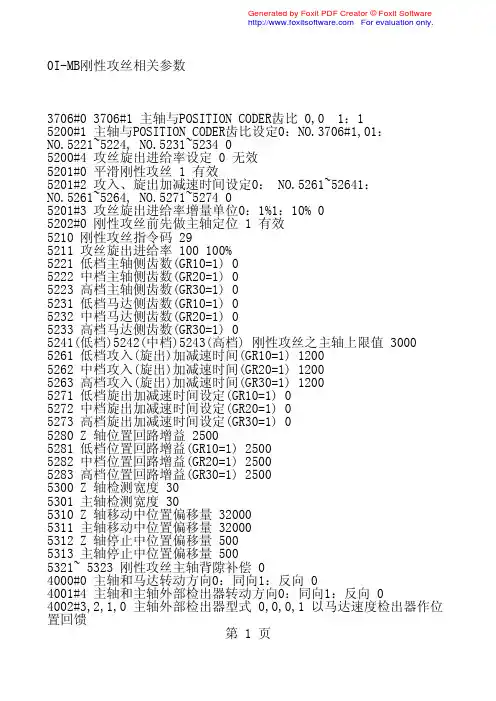
0I-M B刚性攻丝相关参数3706#03706#1主轴与P O S I T I O N C O D E R齿比 0,01:15200#1主轴与P O S I T I O N C O D E R齿比设定0:N O.3706#1,01:N O.5221~5224,N O.5231~523405200#4攻丝旋出进给率设定 0无效5201#0平滑刚性攻丝 1有效5201#2攻入、旋出加减速时间设定0: N O.5261~52641:N O.5261~5264,N O.5271~527405201#3攻丝旋出进给率增量单位0:1%1:10%05202#0刚性攻丝前先做主轴定位 1有效5210刚性攻丝指令码 295211攻丝旋出进给率 100100%5221低档主轴侧齿数(G R10=1)05222中档主轴侧齿数(G R20=1)05223高档主轴侧齿数(G R30=1)05231低档马达侧齿数(G R10=1)05232中档马达侧齿数(G R20=1)05233高档马达侧齿数(G R30=1)05241(低档)5242(中档)5243(高档)刚性攻丝之主轴上限值 3000 5261低档攻入(旋出)加减速时间(G R10=1)12005262中档攻入(旋出)加减速时间(G R20=1)12005263高档攻入(旋出)加减速时间(G R30=1)12005271低档旋出加减速时间设定(G R10=1)05272中档旋出加减速时间设定(G R20=1)05273高档旋出加减速时间设定(G R30=1)05280Z轴位置回路增益 25005281低档位置回路增益(G R10=1)25005282中档位置回路增益(G R20=1)25005283高档位置回路增益(G R30=1)25005300Z轴检测宽度 305301主轴检测宽度 305310Z轴移动中位置偏移量 320005311主轴移动中位置偏移量 320005312Z轴停止中位置偏移量 5005313主轴停止中位置偏移量 5005321~5323刚性攻丝主轴背隙补偿 04000#0主轴和马达转动方向0:同向1:反向 04001#4主轴和主轴外部检出器转动方向0:同向1:反向 04002#3,2,1,0主轴外部检出器型式 0,0,0,1以马达速度检出器作位置回馈第 1页4003#0主轴定位方式 0P O S I T I O N C O D E R4003#3,#2主轴定位旋转方向皮带式:1,0齿轮式:1,11,0固定正转4003#7,6,5,4主轴外部检出器齿数 0,0,0,0256λ/r e v4004#2外部一回转信号 1使用4004#3外部一回转信号检出边缘设定 0上缘4006#1齿数比解析度选择 1*10004010#2,1,0主轴马达检出器型式 0,0,0M i s e n s o r4011#2,1,0主轴马达检出器齿数 0,1,0256λ/r e v4016#7位置控制模式(主轴定位)是否每次检查外部一回转信号 1每次检查4038主轴定位速度 1004044高档速度回路比例增益(C T H1A=0)20(10)4045低档速度回路比例增益(C T H1A=1)20(10)4052高档速度回路积分增益(C T H1A=0)100(10)4053低档速度回路积分增益(C T H1A=1)100(10)4056高档齿数比(C T H1A=0,C T H2A=0)7384057中高档齿数比(C T H1A=0,C T H2A=1)7384058中低档齿数比(C T H1A=1,C T H2A=0)7384059低档齿数比(C T H1A=1,C T H2A=1)7384060主轴定位之高档位置回路增益(C T H1A=0,C T H2A=0)10004061主轴定位之中高档位置回路增益(C T H1A=0,C T H2A=1)1000 4062主轴定位之中低档位置回路增益(C T H1A=1,C T H2A=0)1000 4063主轴定位之低档位置回路增益(C T H1A=1,C T H2A=1)10004065高档位置回路增益(C T H1A=0,C T H2A=0)25004066中高档位置回路增益(C T H1A=0,C T H2A=1)25004067中低档位置回路增益(C T H1A=1,C T H2A=0)25004068低档位置回路增益(C T H1A=1,C T H2A=1)25004085马达电压设定(%)(高速线圈用)704099马达激磁延迟时间 3004137马达电压设定(%)(低速线圈用)704171高档主轴侧齿数(C T H1A=0)484172高档马达侧齿数(C T H1A=0)654173低档主轴侧齿数(C T H1A=1)484174低档马达侧齿数(C T H1A=1)65备 注 :1.N O.4056~4059齿比设定错误时,主轴定位会有左右晃动或定位速度变慢现象。
机床大讲堂第42讲——FANUC0iD系统动力刀刚性攻丝功能的实现FANUC 0iD系统动力刀刚性攻丝功能的实现导读通过对车削复合中心的动力刀刚性攻丝动作原理分析,在对车削复合中心进行数控系统改造的过程中,用编制宏程序的方法来实现动力刀的刚性攻丝,满足工件的加工要求。
陕西航天某研究所,一台韩国产配置FANUC 21T系统的车削复合中心,连续使用了近20年系统严重老化,最后系统损坏严重,参数等数据丢失,由于之前系统没有做好数据备份工作,书面资料缺失严重,所以要恢复的可能性不大,考虑到系统等电气元件严重老化,为此进行电气系统改造,解决目前机床存在的问题。
1系统改造方案数控系统采用FANUC 0iTD系统代替21T系统。
该机床的X轴、Z轴、B轴现均采用日本FANUC公司生产的αif 系列交流伺服电动机。
B轴(系统第3轴)控制刀塔的旋转、动力刀的旋转或则作为CNC轴用于刚性攻丝时的丝锥旋转(B轴伺服电动机动力传给刀库旋转找刀及当前动力刀的旋转都有相应的机械切换装置);主轴控制部分采用αii系列主轴电动机,可以通过手动或自动方式实现主轴的旋转功能;主轴的位置反馈采用主轴上安装的BZi SENSOR反馈元件,因此主轴还可以根据需要切换成CS轴,编程时使用C(或H轴)。
车削复合中心的转塔刀架上,除了装有车削刀具外,还能装上铣刀、钻头和丝锥等旋转的动力刀具,机床主轴具有的数控精确分度的C轴功能,具备了C与Z轴或和C与X轴联动的功能。
这样一台车削中心不仅可以像普通数控车床那样能对回转体件的内外表面(含圆柱面、锥面、曲面等)、端面进行车削加工,还可以利用C-Z轴联动功能车螺纹,利用C轴分度功能和刀架的X或Z轴控制以及其上的动力旋转刀具进行偏离回转体件轴心线的铣削、钻孔和动力刀的刚性攻丝,从而大大地扩展了数控车床复合加工的能力。
2动力刀刚性攻丝动作原理分析相比较主轴的刚性攻丝,本车削复合中心动力刀的刚性攻丝的特点如下,车削复合中心的主轴具备CS功能,利用C轴的分度功能,使工件根据需要进行360°范围的定位,在工件的不同位置根据需要进行Z轴方向的动力刀刚性攻丝(端面刚性攻丝);进行X轴方向的动力刀刚性攻丝(侧面刚性攻丝)。
伺服调试软件(SERVO GUIDE)调试步骤一.设定:1.打开伺服调整软件后,出现以下菜单画面:图1:主菜单2.点击图1的“通信设定”,出现以下菜单。
NC的IP地址检查如下:图3:CNC的IP地址设定电脑的IP地址检查:图4:PC的IP地址设定如果以上设定正确,在测试后还没有显示OK,请检查网线连接是否正确。
图5:NC-PC正确连接对于现在的新笔记本电脑,内置网卡可能自动识别网络信号,如果是这样的,则图5中的耦合器和交叉网线不需要,直接连接就可以了。
二.参数画面:1.点击主菜单(图1)上面的“参数”,如下:图6:参数初始画面点击“在线”,如果正确(NC出于MDI方式,POS画面),则出现下述参数画面,注意,图6下方的CNC型号选择,必须和你正在调试的系统一致,否则所显示的参数号可能和实际的有差别。
2.参数初始画面及系统设定图7:参数系统设定画面参数画面打开后进入“系统设定”画面,该画面的内容不能改动,可以检查该系统的高速高精度功能和加减速功能都有哪些,后面的调整可以针对这些功能修改。
3.轴设定图8:轴设定画面检查一下几项:电机代码是否按HRV3初始化(电机代码大于250)。
电机型号与实际安装的电机是否一致。
放大器(安培数)是否与实际的一致。
检查系统的诊断700#1是否为1(HRV3 OK),如果不为1,则重新初始化伺服参数并检查2013#0=1(所有轴)注:图8的右边的“分离型检测器”对于全闭环系统时候需要设定。
4.加减速一般控制设定如下图所示,设定各个轴在一般控制时候的加减速时间常数和快速移动时间常数。
图9:一般控制的时间常数注意:各个轴的时间常数要设定为相同的数值,使用直线型。
而快速时间常数为铃型,(即图9的T1,T2都需要设定,如果只设定了直线部分T1,则在快速移动时候会产生较大的冲击)。
相关参数(表1) :参数号意义标准值调整方法1610 插补后直线型加减速 1走直线1622 插补后时间常数 50-100走直线1620 快速移动时间常数T1 100-500走直线1621 快速移动时间常数T2 50-2005.AICC/AIAPC控制的时间常数:如果系统有AICC功能(可通过图2检查是否具备)则按照AICC的菜单调整,如果没有AICC功能,则可以通过“AI先行控制”菜单项来调整,参数号及画面基本相同,在这里合在一起介绍(蓝色字体表示AIAPC没有),在实际调试过程中需要注意区别。
Fanuc主轴电机是机床的关键部件,其刚丝参数对机床的加工质量和效率有着重要的影响。
在使用Fanuc主轴电机时,合理的刚丝参数设置能够提高机床的加工精度和稳定性,这对于保障产品质量和生产效率至关重要。
深入了解Fanuc主轴电机的刚丝参数是非常重要的。
1. 了解Fanuc主轴电机的刚丝参数Fanuc主轴电机的刚丝参数包括刚丝的刚度、阻尼和质量。
这些参数通常由制造商提供,并且可以通过机床控制系统进行调整。
刚丝的刚度是指刚丝在受力时的变形能力,刚度越大表示刚丝越不容易变形,有利于提高机床的加工精度。
阻尼是指刚丝在受到外部冲击时的减震能力,合理的阻尼参数能够有效地减少刚丝振动,提高加工稳定性。
而刚丝的质量则直接影响了刚丝的性能和耐久性,对机床加工质量和寿命有着重要的影响。
2. 合理设置刚丝参数对机床的影响合理设置Fanuc主轴电机的刚丝参数对机床的加工质量和效率有着重要的影响。
合理的刚丝参数能够有效地减少刚丝振动,提高机床的加工精度和表面质量。
合理的刚丝参数还能够降低机床的噪音和振动,提高加工环境的舒适度和安全性。
合理的刚丝参数还能够延长机床的使用寿命,降低维护成本,提高生产效率。
了解和合理设置Fanuc主轴电机的刚丝参数对企业的生产效益有着重要的意义。
3. 如何调整和优化刚丝参数为了合理设置Fanuc主轴电机的刚丝参数,首先需要了解机床加工的要求和特点,根据加工精度、加工材料和加工方式等因素来确定刚丝参数的具体数值。
可以根据制造商提供的刚丝参数范围,通过机床控制系统进行调整和优化。
在调整和优化刚丝参数时,可以先进行小幅度的调整,并通过加工试验来验证效果,逐步找到最适合的刚丝参数设置。
还可以根据机床加工的实际情况和经验进行适当的调整,以达到最佳的加工效果。
4. 合理设置刚丝参数的注意事项在设置Fanuc主轴电机的刚丝参数时,需要注意以下几点。
需要根据机床的实际情况和加工要求来合理设置刚丝参数,不可盲目调整。
FANUC刚性攻丝参数调整刚性攻丝参数调整将参数5204#0=1后,可看以下诊断参数:诊断450的值主轴位置偏差(以脉冲为单位)诊断451的值主轴运动脉冲数(以脉冲为单位)诊断452的值为主轴和攻丝轴的瞬时同步误差(以%为单位),正值表示主轴超前于攻丝轴,负值相反。
诊断453的值为主轴和攻丝轴的最大同步误差(以%为单位)调整要点:1.先观察以上的攻丝诊断参数的误差;2.主轴与攻丝轴的位置环回路增益(参数号5280,5281,5282,5283)影响螺纹精度。
5271,5272,5273,3.加减速时间常数(参数号5261,5262,5263为切入时的时间常数,参数号52715274为回退时的时间常数)。
4.回退时出错,可以适当调整回退时间常数。
5.在调整参数过程中应观察诊断参数452,453的值,一般453的值应小于10,就可以了。
6.在调节参数之前,一定要将原参数记下,以便不对时可以修改回去。
7.刚性攻丝时主轴最高转数不能超过1000转,因为机床主轴驱动器已经将此参数设好。
8.以下为XH714G机床攻丝参数。
5200#2→1(刚性攻丝信号RGTAP为0之前解除)5201#0→1(刚性攻丝进行平滑处理)5201#2→0(刚性攻丝的切削时间常数,进/退刀时使用同样的时间参数NO.5261--5264)5202#0→1(启动刚性攻丝时,执行主轴定向)5204#0→1(在诊断画面上显示主轴和攻丝轴的偏差值诊断NO.452--453)5214→200(刚性攻丝同步误差宽幅的设定)5241→1000刚性攻丝中的主轴最高转速(第1齿轮)5242→1000刚性攻丝中的主轴最高转速(第2齿轮)5243→1000刚性攻丝中的主轴最高转速(第3齿轮)5244→1000刚性攻丝中的主轴最高转速(第4齿轮)5261→600刚性攻丝中各齿轮的加/减速时间常数(第1齿轮)5262→600刚性攻丝中各齿轮的加/减速时间常数(第2齿轮)5263→600刚性攻丝中各齿轮的加/减速时间常数(第3齿轮)5264→600刚性攻丝中各齿轮的加/减速时间常数(第4齿轮)5280→1000刚性攻丝中主轴和攻丝轴的位置控制的环路增益5291→3150刚性攻丝中主轴的环路增益乘数(第1档)5292→3150刚性攻丝中主轴的环路增益乘数(第2档)5293→3150刚性攻丝中主轴的环路增益乘数(第3档)5294→3150刚性攻丝中主轴的环路增益乘数(第4档)5300→20刚性攻丝时攻丝轴的到位宽度5301→20刚性攻丝时主轴的到位宽度5310→8000刚性攻丝时攻丝轴移动时位置偏差的极限值5311→8000刚性攻丝时主轴移动时位置偏差的极限值3705#5→1(具有恒线速控制功能或参数NO.3706#4GTT设为1时,对于S代码不输出SF) 3706#4→1(主轴齿轮换档方式为T型)5313→1000刚性攻丝中主轴停止时位置偏差的极限值3742→1000刚性攻丝中移动轴停止时位置偏差的极限值。
FANUC刚性攻丝回退案例介绍刚性攻丝是加工常用功能,在攻丝过程中,由于工件装卡精度或者加工程序编写等原因,断锥现象是比较常见的。
为了尽量避免此问题发生,客户期望通过检测主轴负载,在攻丝时,一旦负载异常,中断刚性攻丝循环,执行刚性攻丝返回动作。
本次功能测试在国内某客户处完成,测试系统为FANUC 0i mate-MD。
1功能介绍刚性攻丝回退(功能说明书中该功能命名为“刚性攻丝返回”)功能可以在复位操作,中断刚性攻丝时,通过PMC信号或者指令,执行刚性攻丝回退动作,将攻丝轴退回到R点位置,回退过程依然保持最近一次刚性攻丝同步位置关系。
需要注意的是,该功能在0i-TD与31i系统上均为选项功能,0i-TD系统功能诊断号为1174#2,31i系统诊断号为1163#6,可以通过以上诊断号确认系统是否具有此功能。
2功能实现刚性攻丝回退功能既可以通过PMC信号触发,也可通过指令执行,只需要利用参数即可进行切换。
使用PMC信号触发刚性攻丝回退,必须在MDI方式下,无法满足客户在MEM方式下的需求,因此本次调试将参数RG3设定为1,使用G30进行指令。
根据客户描述,初步考虑通过以下两种方案实现其需求:(1)利用中断型用户宏程序通过G30指令执行刚性攻丝回退动作,利用中断型用户宏程序功能,将刚性攻丝回退程序编写入宏程序中,在攻丝过程中,遇到主轴负载异常检测信号时,中断刚性攻丝循环,调用刚性攻丝回退宏程序,实现客户需求。
实验测试过程中,发现中断型用户宏程序在刚性攻丝循环中无效,确认功能说明,该功能对复合型固定循环无效。
即会出现如下现象:导通中断型用户宏程序信号后,刚性攻丝动作继续执行,循环结束后才可以执行所调用的宏程序。
因此可判断该方案不可行。
(2)利用外部工件号检索外部工件号检索功能通过PMC信号,检索预先在程序存储器中存储的程序,检测到自动循环启动信号下降沿后执行该程序。
当检测到攻丝轴异常负载时,通过外部复位信号(G8.7)中断刚性攻丝循环,停止攻丝动作,复位完成后利用外部工件号检索功能,调用刚性攻丝回退程序并执行,通过实验测试,实现客户描述的需求,方案可行。
FANUC 维修中常用参数FANUC系统有很丰富的机床参数,为数控机床的安装调试及日常维护带来了方便条件。
根据多年的实践,对常用的机床参数在维修中的应用做一介绍.1.手摇脉冲发生器损坏。
一台FANUC 0TD数控车床,手摇脉冲发生器出现故障,使对刀不能进行微调,需要更换或修理故障件。
当时没有合适的备件,可以先将参数900#3置“0”,暂时将手摇脉冲发生器不用,改为用点动按钮单脉冲发生器操作来进行刀具微调工作.等手摇脉冲发生器修好后再将该参数置“1”。
2.当机床开机后返回参考点时出现超行程报警.上述机床在返回参考点过程中,出现510或511超程报警,处理方法有两种:(1)若X轴在返回参考点过程中,出现510或是511超程报警,可将参数0700LT1X1数值改为+99999999(或将0704LT1X2数值修改为-99999999)后,再一次返回参考点。
若没有问题,则将参数0700或0704数值改为原来数值.(2)同时按P和CAN键后开机,即可消除超程报警.3.一台FANUC 0i数控车床,开机后不久出现ALM701报警。
从维修说明书解释内容为控制部上部的风扇过热,打开机床电气柜,检查风扇电机不动作,检查风扇电源正常,可判定风扇损坏,因一时购买不到同类型风扇,即先将参数RRM8901#0改为“1”先释放ALM701报警,然后在强制冷风冷却,待风扇购到后,再将PRM8901改为“0”.4.一台FANUC 0M数控系统加工中心,主轴在换刀过程中,当主轴与换刀臂接触的一瞬间,发生接触碰撞异响故障。
分析故障原因是因为主轴定位不准,造成主轴头与换刀臂吻合不好,无疑会引起机械撞击声,两处均有明显的撞伤痕迹。
经查,换刀臂与主轴头均无机械松动,且换刀臂定位动作准确,故采用修改N6577参数值解决,即将原数据1525改为1524后,故障排除。
5.密级型参数0900~0939维修法.按FANUC 0MC操作说明书的方法进行参数传输时,密级型参数0900~0939必须用MDI方式输入很不方便。
FANUC设定参数实现刚性攻丝
(大连机床集团有限责任公司黄贤鸿)
1 两种攻丝方式的比较
以前的加工中心为了攻丝, 一般都是根据所选用的丝锥和工艺要求, 在加工程序中编入一个主轴转速和正/ 反转指令, 然后再编人G84 /G74 固定循环, 在固定循环中给出有关的数据, 其中Z 轴的进给速度是根据F=丝锥螺距×主轴转速得出, 这样才能加工出需要的螺孔来。
虽然从表面上看主轴转速与进给速度是根据螺距配合运行的, 但是主轴的转动角度是不受控的, 而且主轴的角度位置与Z 轴的进给没有任何同步关系, 仅仅依靠恒定的主轴转速与进给速度的配合是不够的。
主轴的转速在攻丝的过程中需要经历一个停止-正转-停止-反转-停止的过程, 主轴要加速-制动-加速-制动, 再加上在切削过程中由于工件材质的不均匀, 主轴负载波动都会使主轴速度不可能恒定不变。
对于进给Z 轴, 它的进给速度和主轴也是相似的, 速度不会恒定, 所以两者不可能配合得天衣无缝。
这也就是当采用这种方式攻丝时, 必须配用带有弹簧伸缩装置的夹头, 用它来补偿Z 轴进给与主轴转角运动产生的螺距误差。
如果我们仔细观察上述攻丝过程, 就会明显地看到, 当攻丝到底,Z 轴停止了而主轴没有立即停住(惯量), 攻丝弹簧夹头被压缩一段距离, 而当Z 轴反向进给时, 主轴正在加速, 弹簧夹头被拉伸, 这种补偿弥补了控制方式不足造成的缺陷, 完成了攻丝的加工。
对于精度要求不高的螺纹孔用这种方法加工尚可以满足要求, 但对于螺纹精度要求较高,6H 或以上的螺纹以
及被加工件的材质较软(铜或铝) 时, 螺纹精度将不能得到保证。
还有一点要注意的是, 当攻丝时主轴转速越高,Z 轴进给与螺距累积量之间的误差就越大, 弹簧夹头的伸缩范围也必须足够大, 由于夹头机械结构的限制, 用这种方式攻丝时, 主轴转速只能限制在600r/min 以下。
刚性攻丝就是针对上述方式的不足而提出的, 它在主轴上加装了位置编码器, 把主轴旋转的角度位置反馈给技控系统形成位置闭环, 同时与Z 轴进给建立同步关系, 这样就严格保证了主轴旋转角度和Z 轴进给尺寸的线生比例关系。
因为有了这种同步关系, 即使由于惯量、加减速时间常数不同、负载波动而造成的主轴转动的角度或Z 轴移动的位置变化也不影响加工精度, 因为主轴转角与Z 轴进给是同步的, 在攻丝中不论任何一方受干扰发生变化, 则另一方也会相应变化, 并永远维持线性比例关系。
如果我们用刚性攻丝加工螺纹孔, 可以很清楚地看到, 当Z 轴攻丝到达位置时, 主轴转动与Z 轴进给是同时减速并同时停止的, 主轴反转与Z 轴反向进给同样保持一致。
正是有了同步关系, 丝锥夹头就用普通的钻夹头或更简单的专用夹头就可以了, 而且刚性攻丝时, 只要刀具(丝锥)强度允许,主轴的转速能提高很多,4000r/min 的主轴速度已经不在话下。
加工效率提高 5 倍以上,螺纹精度还得到保证, 目前已经成为加工中心不可缺少的一项主要功能。
2 刚性攻丝功能的实现
从电气控制的角度来看, 数控系统只要具有主轴角度位置控制和同
步功能, 机床就能进行刚性攻丝, 当然还需在机床上加装反馈主轴角度的位置编码器。
要正确地反映主轴的角度位置, 最好把编码器与主轴同轴联接, 如果限于机械结构必需通过传动链联接时, 要坚持1:1 的传动比, 若用皮带, 则非同步带不可。
还有一种可能, 那就是机床主轴和主轴电动机之间是直连, 可以借用主轴电动机本身带的内部编码器作主轴位置反馈, 节省二项开支。
除去安装必要的硬件外, 主要的工作是梯形图控制程序的设计调试。
市面上有多种数控系统, 由于厂家不同, 习惯各异, 对刚性攻丝的信号安排和处理是完全不一样的。
我们曾经设计和调试过几种常用数控系统的刚性攻丝控制程序, 都比较繁琐。
调试人员不易理解梯形图控制程序, 特别是第一台样机调试周期长, 不利于推广和使用。
尽管如此, 加工中心有了该项功能, 扩大了加工范围, 受到用户的青睐。
3 不用设计梯形图实现刚性攻丝
在FANUC 0i 数控系统里, 参数N0.5200#0如果被设定为0, 那么刚性攻丝就需要用M代码指定。
一般情况下, 我们都使用M29,而在梯形图中也必须设计与之相对应的顺序程序, 这对初次尝试者来说还有一定的困难。
正常的情况下, 没有特殊要求时, 主轴参数初始化后把参数No.5200#0 设定为1, 其它有关参数基本不动, 也不用增加任何新的控制程序,这样就简单多了。
在运行调试中要根据机床本身的机械特性设置刚性攻丝必须的一组参数(见表l) 。
参数设置好后就可以直接使用固定循环G84/G74 指令编程, 其格式举例如下:
表1 刚性攻丝参数表
功能参数
攻丝最高主轴转速No.5241-N0.5244
主轴与攻丝轴的时间常数No.5261-No.5264
刚性攻丝轴回路增益No.5280-N0.5284
刚性攻丝时攻丝轴移动位置偏差量的极限值No.5310
刚性攻丝时主轴移动位置偏差量的极限值No.5311
刚性攻丝时的攻丝轴停止时的位置偏差量极限值No.5312
刚性攻丝时的主轴停止时的位置偏差量极限值No.5313
(1)每分钟进给编程
右螺纹
G94; Z 轴每分钟进给
M3 S1000; 主轴正转(1000r/min)
G90G84 X-300.Y-250.Z-150.R-120.P300F1000; 右螺纹攻丝, 螺距1mm
左螺纹
G94; Z 轴每分钟进给
M4 Sl000; 主轴反转(1000r/min)
G90G74 X-300.Y-250.Zl50.R-120.P300F1000;左螺纹攻丝, 螺距1mm
(2)每转(主轴)进给编程
右螺纹
G95; Z 轴进给/ 主轴每转
M3 S1000; 主轴正转(1000r/min)
G90G84 X-300.Y-250.Z-150.R-120.P300F1.0;右螺纹攻丝, 螺距1mm
右螺纹
G95; Z 轴进给/ 主轴每转
M4 S1000; 主轴反转(1000r/min)
G90G74X-300.Y-250.Z150.R-120.P300F1.0;左螺纹攻丝, 螺距1mm
以上刚性攻丝编程由于将参数No.5200#0设置为1, 固定循环G84/成为刚性攻丝的指令, 所以它的编程格式就完全与原固定循环G84/G74 普通攻丝是一样的。
根据用户的使用调查, 刚性攻丝性能大大优于普通攻丝。