机械传动控制第五版冯清秀 邓星钟课后习题答案详解
- 格式:ppt
- 大小:1.87 MB
- 文档页数:5
机电传动控制冯清秀邓星钟第五版习题及答案案场各岗位服务流程销售大厅服务岗:1、销售大厅服务岗岗位职责:1)为来访客户提供全程的休息区域及饮品;2)保持销售区域台面整洁;3)及时补足销售大厅物资,如糖果或杂志等;4)收集客户意见、建议及现场问题点;2、销售大厅服务岗工作及服务流程阶段工作及服务流程班前阶段1)自检仪容仪表以饱满的精神面貌进入工作区域2)检查使用工具及销售大厅物资情况,异常情况及时登记并报告上级。
班中工作程序服务流程行为规范迎接指引递阅资料上饮品(糕点)添加茶水工作要求1)眼神关注客人,当客人距3米距离时,应主动跨出自己的位置迎宾,然后侯客迎询问客户送客户注意事项15度鞠躬微笑问候:“您好!欢迎光临!”2)在客人前方1-2米距离领位,指引请客人向休息区,在客人入座后问客人对座位是否满意:“您好!请问坐这儿可以吗?”得到同意后为客人拉椅入座“好的,请入座!”3)若客人无置业顾问陪同,可询问:请问您有专属的置业顾问吗?,为客人取阅项目资料,并礼貌的告知请客人稍等,置业顾问会很快过来介绍,同时请置业顾问关注该客人;4)问候的起始语应为“先生-小姐-女士早上好,这里是XX销售中心,这边请”5)问候时间段为8:30-11:30 早上好11:30-14:30 中午好 14:30-18:00下午好6)关注客人物品,如物品较多,则主动询问是否需要帮助(如拾到物品须两名人员在场方能打开,提示客人注意贵重物品);7)在满座位的情况下,须先向客人致歉,在请其到沙盘区进行观摩稍作等待;阶段工作及服务流程班中工作程序工作要求注意事项饮料(糕点服务)1)在所有饮料(糕点)服务中必须使用托盘;2)所有饮料服务均已“对不起,打扰一下,请问您需要什么饮品”为起始;3)服务方向:从客人的右面服务;4)当客人的饮料杯中只剩三分之一时,必须询问客人是否需要再添一杯,在二次服务中特别注意瓶口绝对不可以与客人使用的杯子接触;5)在客人再次需要饮料时必须更换杯子;下班程序1)检查使用的工具及销售案场物资情况,异常情况及时记录并报告上级领导;2)填写物资领用申请表并整理客户意见;3)参加班后总结会;4)积极配合销售人员的接待工作,如果下班时间已经到,必须待客人离开后下班;1.3.3.3吧台服务岗1.3.3.3.1吧台服务岗岗位职责1)为来访的客人提供全程的休息及饮品服务;2)保持吧台区域的整洁;3)饮品使用的器皿必须消毒;4)及时补充吧台物资;5)收集客户意见、建议及问题点;1.3.3.3.2吧台服务岗工作及流程阶段工作及服务流程班前阶段1)自检仪容仪表以饱满的精神面貌进入工作区域2)检查使用工具及销售大厅物资情况,异常情况及时登记并报告上级。
习题与思考题第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
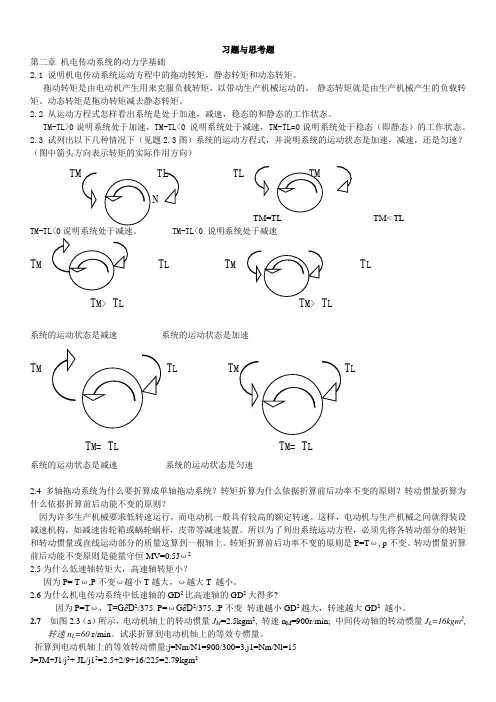
2.3 试列出以下几种情况下(见题2.3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM=TL TM< TLTM-TL<0说明系统处于减速。
TM-TL<0 说明系统处于减速T M T L T M T LT M> T L M>L系统的运动状态是减速系统的运动状态是加速T M T L T T LT M= T L T M= T L系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小。
2.6为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
课后习题答案第一章第二章2.1答:运动方程式:dt d J T T L M ω=-dL M T T T =-Td>0时:系统加速; Td=0 时:系统稳速;Td<0时,系统减速或反向加速 2.2答:拖动转矩:电动机产生的转矩Tm 或负载转矩TL 与转速n 相同时,就是拖动转矩。
静态转矩:电动机轴上的负载转矩TL ,它不随系统加速或减速而变化。
动态转矩:系统加速或减速时,存在一个动态转矩Td ,它使系统的运动状态发生变化。
2.3答:a 匀速,b 减速,c 减速,d 加速,e 减速,f 匀速2.4答:在多轴拖动系统情况下,为了列出这个系统运动方程,必须先把各传动部分的转矩和转动惯量或直线运动部分的质量都折算到电动机轴上。
由于负载转矩是静态转矩,所以可根据静态时功率守恒原则进行折算。
由于转动惯量和飞轮转矩与运动系统动能有关,所以可根据动能守恒原则进行折算。
2.5答:忽略磨擦损失的情况下,传动系统的低速轴和调速轴传递的功率是一样的,即P1=P2而P1=T1ω1,P2=T2ω2所以T1ω1=T2ω2,当ω1>ω2时, T1<T22.6答:因为低速轴的转矩大,所设计的低速轴的直径及轴上的齿轮等零件尺寸大,质量也大,所以GD2大,而高速轴正好相反。
2.7答: j1=ωM/ω1= nM/n1=900/300=3jL=ωM/ωL= nM/nL=900/60=15)(8.21516325.2222211m kg j J j J J J L L M Z ⋅=++=++= 2.8答:m in)/(4.594495021r j j n n M L =⨯==)/(37.02604.5924.0603s m j Dn v L =⨯⨯⨯==ππTL=9.55Fv/(η1nM)=9.55×100×0.37/(0.83×950)=0.45N.m2222365M M Z n Fv GD GD +=δ 222232.1~16.195037.010036505.1)25.1~1.1(m N GD Z⋅=⨯⨯+⨯= 2.9答:恒转矩型、泵类、直线型、恒功率型。
课后习题答案第一章第二章2.1答:运动方程式:dtd JT T LM dL MT T T Td>0时:系统加速;Td=0 时:系统稳速;Td<0时,系统减速或反向加速2.2答:拖动转矩:电动机产生的转矩Tm 或负载转矩TL 与转速n 相同时,就是拖动转矩。
静态转矩:电动机轴上的负载转矩TL ,它不随系统加速或减速而变化。
动态转矩:系统加速或减速时,存在一个动态转矩Td ,它使系统的运动状态发生变化。
2.3答:a 匀速,b 减速,c 减速,d 加速,e 减速,f 匀速2.4答:在多轴拖动系统情况下,为了列出这个系统运动方程,必须先把各传动部分的转矩和转动惯量或直线运动部分的质量都折算到电动机轴上。
由于负载转矩是静态转矩,所以可根据静态时功率守恒原则进行折算。
由于转动惯量和飞轮转矩与运动系统动能有关,所以可根据动能守恒原则进行折算。
2.5答:忽略磨擦损失的情况下,传动系统的低速轴和调速轴传递的功率是一样的,即P1=P2而P1=T1ω1,P2=T2ω2所以T1ω1=T2ω2,当ω1>ω2时,T1<T2 2.6答:因为低速轴的转矩大,所设计的低速轴的直径及轴上的齿轮等零件尺寸大,质量也大,所以GD2大,而高速轴正好相反。
2.7答:j1=ωM/ω1= nM/n1=900/300=3 jL=ωM/ωL= nM/nL=900/60=15)(8.21516325.2222211m kg j J jJ J J LL MZ 2.8答:m in)/(4.594495021r j j n n M L)/(37.02604.5924.0603s m j Dn vL TL=9.55Fv/(η1nM)=9.55×100×0.37/(0.83×950)=0.45N.m2222365MMZnFv GDGD222232.1~16.195037.010036505.1)25.1~1.1(mN GDZ2.9答:恒转矩型、泵类、直线型、恒功率型。

5.1步进电动机的位移量与输入脉冲数严格成正比,这就不会引起误差的积累,其转速与脉冲频率和步矩角有关。
控制输入脉冲数量、频率及电动机各组的接通次序,可以得到各种需要的运行特征。
5.2步进电机的作用就是能够精确控制转动的角度,步距角越小,它每一步能转动的角度就越小,我们就能得到更精确的角度控制.比如步角为3度的,我们可以控制3度,6度,9度...,而步角为10度的,我们只能控制10度,20度,30度...显然步角越小,能控制的角度越精确.5.3电磁式(激磁式)特点:电动机的定子和转子均有绕组,靠电磁力矩使转子转动。
磁阻式(反应式)特点:气隙小,定位精度高;步距小,控制准确;励磁电流较大,要求驱动电源功率大;电动机内部阻尼较长,当相数较小时,单步运行振荡时间较长;断电后无定位转矩,使用中需自锁定位。
永磁式特点:步距角大,控制精度不高;控制功率小,效率高;内阻尼较大,单片振荡时间短;断电后具有一定的定位转矩。
混合式(永磁感应子式)特点:驱动电流小,效率高,过载能力强,控制精度高。
5.4每当输入一个电脉冲时,电动机转过的一个固定的角度称为步矩角。
一台步进电动机有两个步矩角,说明它有两种通电方式,3°的意思是相邻两次通电的相的数目相同时的步矩角,1.5°的意思是相邻两次通电的相的数目不同时的步矩角。
单三拍:每次只有一相绕组通电,而每个循环只有三次通电。
单双六拍:第一次通电有一相绕组通电,然后下一次有两相通电,这样交替循环运行,而每次循环只有六次通电。
双三拍:每次有两相绕组通电,每个循环有三次通电。
5.8 1) 步距角——步进电动机的主要性能指标之一,它直接影响启动和运行频率2)最大静转矩3) 空载启动频率——步进电动机在空载情况下,不失步启动所允许的最高频率。
在负载情况下,不失步启动所允许的最高频率随负载的增加而显著下降。
4) 连续运行频率——当步进电动机运行频率连续上升时,电动机不失步运行的最高频率。
课后习题答案第一章第二章2.1答:运动方程式:dt d JT T L M ω=-dL M T T T =-Td>0时:系统加速; Td=0 时:系统稳速;Td<0时,系统减速或反向加速2.2答:拖动转矩:电动机产生的转矩Tm 或负载转矩TL 与转速n 相同时,就是拖动转矩。
静态转矩:电动机轴上的负载转矩TL ,它不随系统加速或减速而变化。
动态转矩:系统加速或减速时,存在一个动态转矩Td ,它使系统的运动状态发生变化。
2.3答:a 匀速,b 减速,c 减速,d 加速,e 减速,f 匀速2.4答:在多轴拖动系统情况下,为了列出这个系统运动方程,必须先把各传动部分的转矩和转动惯量或直线运动部分的质量都折算到电动机轴上。
由于负载转矩是静态转矩,所以可根据静态时功率守恒原则进行折算。
由于转动惯量和飞轮转矩与运动系统动能有关,所以可根据动能守恒原则进行折算。
2.5答:忽略磨擦损失的情况下,传动系统的低速轴和调速轴传递的功率是一样的,即P1=P2而P1=T1ω1,P2=T2ω2所以T1ω1=T2ω2,当ω1>ω2时, T1<T22.6答:因为低速轴的转矩大,所设计的低速轴的直径及轴上的齿轮等零件尺寸大,质量也大,所以GD2大,而高速轴正好相反。
2.7答: j1=ωM/ω1= nM/n1=900/300=3 jL=ωM/ωL= nM/nL=900/60=15)(8.21516325.2222211m kg j J j J J J L L M Z ⋅=++=++= 2.8答:m in)/(4.594495021r j j n n M L =⨯==)/(37.02604.5924.0603s m j Dn v L =⨯⨯⨯==ππTL=9.55Fv/(η1nM)=9.55×100×0.37/(0.83×950)=0.45N.m2222365M MZn Fv GD GD +=δ222232.1~16.195037.010036505.1)25.1~1.1(m N GD Z⋅=⨯⨯+⨯=2.9答:恒转矩型、泵类、直线型、恒功率型。
机电传动控制冯清秀邓星钟第五版习题及答案第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩的概念。
拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0 说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0 说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题2.3 图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM TMTLTLNTM=TL TM< TLTM-TL>0 说明系统处于加速。
TM-TL<0 说明系统处于减速TM TL TM TLTM> TLTM>TL系统的运动状态是减速系统的运动状态是加速TMTM= TLTM=TL系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=T ω,p 不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5 为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T 越大,ω越大T 越小。
2.6 为什么机电传动系统中低速轴的GD2 逼高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P 不变转速越小GD2 越大,转速越大GD2 越小。