矩阵范数详解
- 格式:doc
- 大小:682.50 KB
- 文档页数:9
矩阵的范数文章目录•前言•一、诱导范数(Induced norm)••谱范数•二、向量式范数(Entry-wise norm)••F-范数•三、Schatten 范数(Schatten norm)•四、矩阵2-范数•总结前言矩阵分析学习笔记之矩阵范数。
三类重要的矩阵范数:诱导范数(Induced norm),向量式范数(Entry-wise norm),Schatten 范数(Schatten norm)。
矩阵A ∈ K m × n A\in K^{m\times n}A∈Km×n表示其定义在实数域或者复数域上。
一、诱导范数(Induced norm)诱导范数也称算子范数(operator norm)。
诱导p-范数的定义如下:∥ A ∥ p = s u p x ≠ 0 ∥ A x ∥ p ∥ x ∥ p \Vert A\Vert_p=\underset{x\neq 0}{\rm sup}\frac{\Vert Ax \Vert_p}{\Vert x\Vert_p}∥A∥p=x=0sup∥x∥p∥Ax∥p特别的,当p = 1 p=1p=1时,有∥ A ∥ 1 = max 1 ≤ j ≤ n ∑ i = 1 m ∣ a i j ∣ \Vert A\Vert_1=\max_{1\le j\le n}\sum_{i=1}^{m}\vert a_{ij}\vert∥A∥1=1≤j≤nmax i=1∑m∣aij∣也就是绝对值的列和的最大值。
当p = ∞ p=\inftyp=∞时,有∥ A ∥ ∞ = max 1 ≤ i ≤ m ∑ j = 1 n ∣ a i j ∣ \Vert A\Vert_{\infty}=\max_{1\le i\lem}\sum_{j=1}^{n}\vert a_{ij}\vert∥A∥∞=1≤i≤mmax j=1∑n∣aij∣也就是绝对值的行和的最大值。

向量和矩阵的范数的若干难点导引矩阵范数的定义引入矩阵范数的原因与向量范数的理由是相似的,在许多场合需要“测量”矩阵的“大小”,比如矩阵序列的收敛,解线性方程组时的误差分析等,具体的情况在这里不再复述。
最容易想到的矩阵范数,是把矩阵m nA C ⨯∈可以视为一个mn 维的向量(采用所谓“拉直”的变换),所以,直观上可用mnC上的向量范数来作为m nA C⨯∈的矩阵范数。
比如在1l -范数意义下,111||||||m niji j A a===∑∑()12tr()HA A =; (1.1)在2l -范数意义下,12211||||||m n F ij i j A a ==⎛⎫= ⎪⎝⎭∑∑, (1.2)注意这里为了避免与以后的记号混淆,下标用“F ”,这样一个矩阵范数,称为Frobenius范数,或F-范数。
可以验证它们都满足向量范数的3个条件。
那么是否矩阵范数就这样解决了?因为数学上的任一定义都要与其对象的运算联系起来,矩阵之间有乘法运算,它在定义范数时应予以体现,也即估计AB 的“大小”相对于A B 与的“大小”关系。
定义1 设m nA C ⨯∈,对每一个A ,如果对应着一个实函数()N A ,记为||||A ,它满足以下条件:(1)非负性:||||0A ≥;(1a )正定性:||||0m nA O A ⨯=⇔=(2)齐次性:||||||||||,A A C ααα=∈;(3)三角不等式:||A ||||||||||||,m n A B A B B C ⨯+≤+∀∈则称()||||N A A =为A 的广义矩阵范数。
进一步,若对,,m n n l m lC C C ⨯⨯⨯上的同类广义矩阵范数||||∙,有(4)(矩阵相乘的)相容性:||A ||||||||||||AB A B ≤, n lB C ⨯∈, 则称()||||N A A =为A 的矩阵范数。
我们现在来验证前面(1.1)和(1.2)定义的矩阵范数是否合法?我们这里只考虑(1.2),把较容易的(1.1)的验证留给同学们,三角不等式的验证。
《周国标师生交流讲席010》向量和矩阵的范数的若干难点导引(二)一.矩阵范数的定义引入矩阵范数的原因与向量范数的理由是相似的,在许多场合需要“测量”矩阵的“大小”,比如矩阵序列的收敛,解线性方程组时的误差分析等,具体的情况在这里不再复述。
最容易想到的矩阵范数,是把矩阵A C m n可以视为一个mn维的向量(采用所谓“拉直”的变换),所以,直观上可用C mn上的向量范数来作为A C m n的矩阵范数。
比如m n 1在∣1 -范数意义下,IIAl1 ;二Ia ijI= tr(A H A) 2; (1.1 )1Zl mn A2在I2-范数意义下,∣∣A∣∣F=∑∑同|2,(1.2)Iy j A J注意这里为了避免与以后的记号混淆,下标用“F”,这样一个矩阵范数,称为Frobenius范数,或F-范数。
可以验证它们都满足向量范数的3个条件。
那么是否矩阵范数就这样解决了?因为数学上的任一定义都要与其对象的运算联系起来,矩阵之间有乘法运算,它在定义范数时应予以体现,也即估计AB的“大小”相对于A与B的“大小”关系。
定义1设A C mn,对每一个A ,如果对应着一个实函数N(A),记为IlAll ,它满足以下条件:(1)非负性:|| A||_0 ;(1 a)正定性:A=O mn= IIAII= 0(2)齐次性:||〉A||=| |||A||, • C ;(3)三角不等式:||A||A B||—||A|| ||B||, -B C m n则称N(A)=|| A||为A的广义矩阵范数。
进一步,若对C m n,C n 1C m l上的同类广义矩阵范数|| || ,有(4)(矩阵相乘的)相容性:|| A || AB ||_|| A|||| B ||, B C n I , 则称N(A) =||A||为A的矩阵范数。
我们现在来验证前面(1.1 )和(1.2 )定义的矩阵范数是否合法?我们这里只考虑(1.2 ),把较容易的(1.1 )的验证留给同学们,三角不等式的验证。

《周国标师生交流讲席010》向量和矩阵的范数的若干难点导引(二)一. 矩阵范数的定义引入矩阵范数的原因与向量范数的理由是相似的,在许多场合需要“测量”矩阵的“大小”,比如矩阵序列的收敛,解线性方程组时的误差分析等,具体的情况在这里不再复述。
最容易想到的矩阵范数,是把矩阵m nA C ⨯∈可以视为一个mn 维的向量(采用所谓“拉直”的变换),所以,直观上可用mn C上的向量范数来作为m nA C⨯∈的矩阵范数。
比如在1l -范数意义下,111||||||mniji j A a===∑∑()12tr()HA A =; ()在2l -范数意义下,12211||||||mnF ij i j A a ==⎛⎫= ⎪⎝⎭∑∑, () 注意这里为了避免与以后的记号混淆,下标用“F ”,这样一个矩阵范数,称为Frobenius范数,或F-范数。
可以验证它们都满足向量范数的3个条件。
那么是否矩阵范数就这样解决了因为数学上的任一定义都要与其对象的运算联系起来,矩阵之间有乘法运算,它在定义范数时应予以体现,也即估计AB 的“大小”相对于A B 与的“大小”关系。
定义1 设m nA C ⨯∈,对每一个A ,如果对应着一个实函数()N A ,记为||||A ,它满足以下条件:(1)非负性:||||0A ≥;(1a )正定性:||||0m nA O A ⨯=⇔=(2)齐次性:||||||||||,A A C ααα=∈;(3)三角不等式:||A ||||||||||||,m nA B A B B C ⨯+≤+∀∈则称()||||N A A =为A 的广义矩阵范数。
进一步,若对,,m nn l m l C C C ⨯⨯⨯上的同类广义矩阵范数||||•,有(4)(矩阵相乘的)相容性:||A ||||||||||||AB A B ≤, n lB C⨯∈,则称()||||N A A =为A 的矩阵范数。
我们现在来验证前面()和()定义的矩阵范数是否合法我们这里只考虑(),把较容易的()的验证留给同学们,三角不等式的验证。

《周国标师生交流讲席010》向量和矩阵的范数的若干难点导引(二)一. 矩阵范数的定义引入矩阵范数的原因与向量范数的理由是相似的,在许多场合需要“测量”矩阵的“大小”,比如矩阵序列的收敛,解线性方程组时的误差分析等,具体的情况在这里不再复述。
最容易想到的矩阵范数,是把矩阵m nA C ⨯∈可以视为一个mn 维的向量(采用所谓“拉直”的变换),所以,直观上可用mn C上的向量范数来作为m nA C⨯∈的矩阵范数。
比如在1l -范数意义下,111||||||mniji j A a===∑∑()12tr()HA A =; (1.1)在2l -范数意义下,12211||||||mnF ij i j A a ==⎛⎫= ⎪⎝⎭∑∑,(1.2)注意这里为了避免与以后的记号混淆,下标用“F ”,这样一个矩阵范数,称为Fro be nius 范数,或F-范数。
可以验证它们都满足向量范数的3个条件。
那么是否矩阵范数就这样解决了?因为数学上的任一定义都要与其对象的运算联系起来,矩阵之间有乘法运算,它在定义范数时应予以体现,也即估计AB 的“大小”相对于A B 与的“大小”关系。
定义1 设m nA C ⨯∈,对每一个A ,如果对应着一个实函数()N A ,记为||||A ,它满足以下条件:(1)非负性:||||0A ≥;(1a )正定性:||||0m nA O A ⨯=⇔=(2)齐次性:||||||||||,A A C ααα=∈;(3)三角不等式:||A ||||||||||||,m n A B A B B C ⨯+≤+∀∈则称()||||N A A =为A 的广义矩阵范数。
进一步,若对,,m nn l m l CC C ⨯⨯⨯上的同类广义矩阵范数||||•,有(4)(矩阵相乘的)相容性:||A ||||||||||||AB A B ≤, n lB C ⨯∈,则称()||||N A A =为A 的矩阵范数。
我们现在来验证前面(1.1)和(1.2)定义的矩阵范数是否合法?我们这里只考虑(1.2),把较容易的(1.1)的验证留给同学们,三角不等式的验证。
矩阵范数的计算公式矩阵范数是矩阵的一种度量,用于衡量矩阵的大小。
它可以帮助我们了解和分析矩阵的特性以及它们在不同数学和计算领域中的应用。
矩阵范数有许多不同的定义和计算方法,下面将介绍一些常见的矩阵范数及其计算公式。
1.矩阵的1-范数:矩阵的1-范数是指矩阵列绝对值之和的最大值,即以列为单位,计算每一列绝对值之和,然后找出最大的一个值。
计算公式如下:A,1 = max{∑,a[i][j],}, 1≤i≤n2.矩阵的∞-范数:矩阵的∞-范数是指矩阵行绝对值之和的最大值,即以行为单位,计算每一行绝对值之和,然后找出最大的一个值。
计算公式如下:A,∞ = max{∑,a[i][j],}, 1≤j≤n3.矩阵的2-范数:矩阵的2-范数是指通过矩阵A与其转置矩阵A^T相乘的方式得到的最大特征值的平方根。
计算公式如下:A,2 = √(λ_max(A^T*A))4.矩阵的F-范数:矩阵的F-范数是指矩阵所有元素的平方和的平方根。
计算公式如下:A,F=√(∑,a[i][j],^2)以上是常见的矩阵范数的计算公式。
其中,1-范数和∞-范数是直接计算每一列或每一行的绝对值之和来求得的;2-范数是通过矩阵的特征值来计算的;F-范数是通过矩阵所有元素的平方和来计算的。
矩阵范数在数学和计算领域中具有广泛的应用。
例如,在线性代数中,矩阵范数可以用来衡量矩阵的条件数和稳定性,以及判断矩阵是否奇异;在机器学习和数据挖掘中,矩阵范数可以用来评估模型的复杂度和泛化能力;在图论和网络分析中,矩阵范数可以用来度量图的连通性和稳定性;在优化和最优控制中,矩阵范数可以用来定义目标函数和约束条件。
总之,矩阵范数是矩阵的一种度量,用于衡量矩阵的大小。
不同的矩阵范数有不同的计算方法和应用领域,通过矩阵范数的计算和分析,可以帮助我们了解和把握矩阵的特性,并在不同的数学和计算问题中得到应用。
常见的矩阵范数矩阵范数是衡量矩阵性质的一种重要指标,常见的矩阵范数有谱范数、F范数、1范数和∞范数等。
本文将从不同的角度探讨这些矩阵范数的定义、特性以及其在实际问题中的应用。
一、谱范数谱范数是矩阵的最大奇异值,用于衡量矩阵的最大特征值。
谱范数的定义为矩阵A的最大奇异值,即∥A∥2=max│λi│,其中λi表示矩阵A的第i个特征值。
谱范数具有以下性质:1. 非负性:对于任意矩阵A,有∥A∥2≥0。
2. 齐次性:对于任意标量k和矩阵A,有∥kA∥2=|k|∥A∥2。
3. 三角不等式:对于任意两个矩阵A和B,有∥A+B∥2≤∥A∥2+∥B∥2。
谱范数在实际问题中的应用非常广泛,例如在图像处理中,可以使用谱范数来衡量图像的清晰度;在机器学习中,可以使用谱范数来衡量模型的复杂度。
二、F范数F范数是矩阵的元素绝对值平方和的平方根,用于衡量矩阵的离散程度。
F范数的定义为矩阵A的元素绝对值平方和的平方根,即∥A∥F=√(∑|aij|^2),其中aij表示矩阵A的第i行第j列的元素。
F范数具有以下性质:1. 非负性:对于任意矩阵A,有∥A∥F≥0。
2. 齐次性:对于任意标量k和矩阵A,有∥kA∥F=|k|∥A∥F。
3. 三角不等式:对于任意两个矩阵A和B,有∥A+B∥F≤∥A∥F+∥B∥F。
F范数在实际问题中的应用也非常广泛,例如在图像处理中,可以使用F范数来衡量图像的噪声程度;在推荐系统中,可以使用F范数来衡量用户对商品的评分矩阵的稀疏程度。
三、1范数和∞范数1范数和∞范数分别是矩阵的列和行绝对值之和的最大值,用于衡量矩阵的稀疏程度。
1范数的定义为矩阵A的列绝对值之和的最大值,即∥A∥1=max(∑|aij|),其中∑表示对所有列求和;∞范数的定义为矩阵A的行绝对值之和的最大值,即∥A∥∞=max(∑|aij|),其中∑表示对所有行求和。
1范数和∞范数具有以下性质:1. 非负性:对于任意矩阵A,有∥A∥1≥0,∥A∥∞≥0。
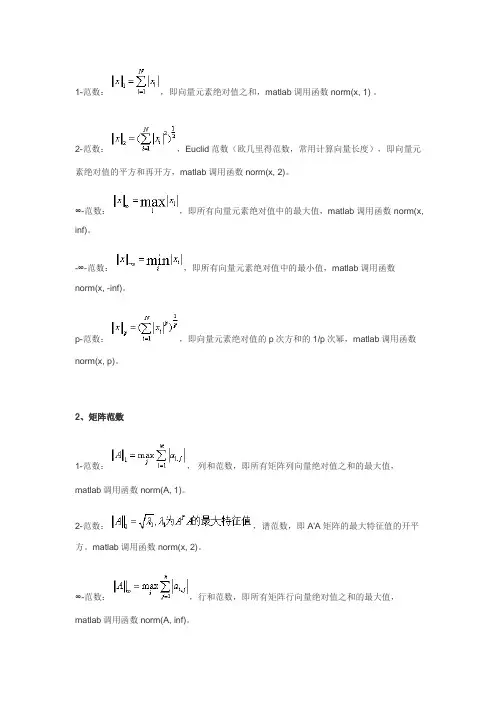
1-范数:,即向量元素绝对值之和,matlab调用函数norm(x, 1) 。
2-范数:,Euclid范数(欧几里得范数,常用计算向量长度),即向量元素绝对值的平方和再开方,matlab调用函数norm(x, 2)。
∞-范数:,即所有向量元素绝对值中的最大值,matlab调用函数norm(x, inf)。
-∞-范数:,即所有向量元素绝对值中的最小值,matlab调用函数
norm(x, -inf)。
p-范数:,即向量元素绝对值的p次方和的1/p次幂,matlab调用函数norm(x, p)。
2、矩阵范数
1-范数:,列和范数,即所有矩阵列向量绝对值之和的最大值,matlab调用函数norm(A, 1)。
2-范数:,谱范数,即A'A矩阵的最大特征值的开平方。
matlab调用函数norm(x, 2)。
∞-范数:,行和范数,即所有矩阵行向量绝对值之和的最大值,matlab调用函数norm(A, inf)。
F-范数:,Frobenius范数,即矩阵元素绝对值的平方和再开平方,matlab调用函数norm(A, ’fro‘)。
矩阵范数三角不等式证明摘要:一、矩阵范数简介1.矩阵范数的定义2.矩阵范数的分类二、三角不等式证明1.矩阵范数与向量范数的关系2.矩阵三角不等式的推导三、矩阵范数在矩阵运算中的应用1.矩阵加法与矩阵范数的关系2.矩阵乘法与矩阵范数的关系四、矩阵范数的实际应用案例1.信号处理中的应用2.机器学习中的应用正文:一、矩阵范式简介1.矩阵范式的定义矩阵范式是用来衡量矩阵大小的一种数值指标。
给定一个n阶矩阵A,我们可以计算其矩阵范数。
常见的矩阵范式有:奇异值分解(SVD)范数、弗罗贝尼乌斯(Frobenius)范式、谱范式等。
2.矩阵范式的分类(1)奇异值分解(SVD)范式:矩阵A的奇异值分解为A=UΣV*,其中U、Σ、V分别为正交矩阵、对角矩阵和正交矩阵。
奇异值分解范数即为Σ的最大奇异值。
(2)弗罗贝尼乌斯(Frobenius)范式:矩阵A的弗罗贝尼乌斯范数为矩阵A的迹与矩阵A的行列式之和的平方根,即||A||_F = sqrt(trace(A"A))。
(3)谱范式:矩阵A的谱范数为矩阵A的特征值的平方和的最大值,即||A||_∞ = max_λ(λ^2)。
二、三角不等式证明1.矩阵范数与向量范数的关系对于任意矩阵A和向量x,有矩阵范数与向量范数的关系:||Ax|| ≤ ||A|| ||x||。
2.矩阵三角不等式的推导(1)给定两个矩阵A和B,若A≤B,则有||A|| ≤ ||B||。
(2)对于任意矩阵A,有A^2 ≤ ||A||^2 * I。
(3)对于任意矩阵A和B,有AB ≤ ||A|| * ||B||。
三、矩阵范数在矩阵运算中的应用1.矩阵加法与矩阵范数的关系对于任意矩阵A、B,有||A+B|| ≤ ||A|| + ||B||。
2.矩阵乘法与矩阵范数的关系对于任意矩阵A、B,有||AB|| ≤ ||A|| * ||B||。
四、矩阵范数的实际应用案例1.信号处理中的应用在信号处理中,矩阵范数常用于衡量信号的幅度、滤波器的性能等。
矩阵范数详解
矩阵A∈的范数||A||是一个非负实数,它也要满足:
(1)||A||≥0,||A|| = 0 A = 0;
(2)||A|| = ||||A||,∈ R;
(3)||A + B|| ≤ ||A|| + ||B||
根据上面的满足条件,还可以加上更强的性质来得到更有用的矩阵范数,比如满足乘法性质的矩阵范数:||A|| ≤ ||A|| ||B||,这个性质可以进一步加上更强的性质来得到更有用的矩阵范数,比如可要求矩阵范数满足与向量范数的相容性:||Ax|| ≤||x||
由||Ax|| ≤||x||可推出= =
由此可推出矩阵范数如果满足==,则称为由向量范数的诱导范数/算子范数
诱导范数/算子范数有什么用呢?可以这样理解:诱导范数/算子范数表示单位圆/球/超球面上的所有向量x经过线性变换后得到的所有向量Ax中最长的那个范数,或者说表示任一向量经过矩阵A所代表的线性变换后得到的所有向量中最长的那个的范数与原向量x的范数的比值
(1)矩阵的列和范数
1范数引导出的诱导范数如下:
||A|| =
(2)矩阵的谱范数:所有特征值中最大的那个2范数引导出的诱导范数如下:
||A|| =
若A为实矩阵,则就是。
证明矩阵范数的三个公式一、矩阵的范数在线性代数中,范数(norm)是对向量或矩阵的度量,它可以衡量向量或矩阵的大小。
在矩阵范数(matrix norm)中,我们主要关注的是矩阵的大小。
矩阵范数有多种定义方式,其中常见的包括F范数、1范数和∞范数。
在本文中,我们将重点讨论这三种矩阵范数的定义和性质。
二、F范数的定义和性质F范数,也称为Frobenius范数,是矩阵范数中最常见的一种。
对于一个n行m列的矩阵A,其F范数定义为所有元素的平方和的平方根,即||A||F = sqrt(∑∑|aij|^2),其中∑∑表示对矩阵中所有元素求和。
F范数有以下性质:1. 非负性:对于任意矩阵A,F范数始终大于等于0,即||A||F >= 0。
2. 齐次性:对于任意标量c,矩阵A和F范数,有||cA||F = |c| * ||A||F。
3. 三角不等式:对于任意矩阵A和B,有||A + B||F <= ||A||F + ||B||F。
4. 子多范数性质:对于任意矩阵A和B,有||AB||F <= ||A||F *||B||F。
三、1范数的定义和性质1范数是矩阵范数中的另一种常见形式。
对于一个n行m列的矩阵A,其1范数定义为矩阵的列向量的绝对值之和的最大值,即||A||1 = max{∑|aij|},其中∑表示对矩阵中所有列向量求和。
1范数有以下性质:1. 非负性:对于任意矩阵A,1范数始终大于等于0,即||A||1 >= 0。
2. 齐次性:对于任意标量c,矩阵A和1范数,有||cA||1 = |c| * ||A||1。
3. 三角不等式:对于任意矩阵A和B,有||A + B||1 <= ||A||1 + ||B||1。
4. 子多范数性质:对于任意矩阵A和B,有||AB||1 <= ||A||1 * ||B||1。
四、∞范数的定义和性质∞范数是矩阵范数中的另一种常见形式。
对于一个n行m列的矩阵A,其∞范数定义为矩阵的行向量的绝对值之和的最大值,即||A||∞ = max{∑|aij|},其中∑表示对矩阵中所有行向量求和。
§2.2 矩阵的范数我们知道:向量本身可以看作是矩阵,而一般的矩阵又有自身的运算特点,比如矩阵的乘法运算。
因此,我们定义矩阵的范数时需要考虑矩阵的本身的特点,这就有了我们以下要讨论的内容:一、 矩阵的范数1.矩阵范数的定义设||||:m n C R ×→i 是实值函数,若它满足下述三个条件: (1) 非负性:,||||0,and ||||00m n A C A A A ×∀∈≥=⇔= (2) 齐次性:,,||||||||||m n k C A C kA k A ×∀∈∈= (3) 三角不等式:,,||||||||||||m n A B C A B A B ×∀∈+≤+ 则称||||i 为广义矩阵范数,若||||i 还满足下述第四个性质: (4) 相容性:,,||||||||||||m n n l A C B C AB A B ××∀∈∈≤i 则称||||i 为矩阵范数。
注:在相容性的定义中,n l B C ×∈,m l AB C ×∈,实数||||B ,||||AB 的定义规则与实数||||A 的定义规则相同。
2. 矩阵范数的连续性与向量的情况一样,对于矩阵序列而言,它也有极限的概念。
设矩阵序列(){}k A ,其中()k m n A C ×∈,若()k A 的每一个元素()k ij a 均有极限ij a ,则称矩阵序列(){}k A 有极限()ij A a =,或者说(){}k A 收敛到矩阵A ,记作()()lim ()k k k A A A A →+∞=→不收敛的矩阵序列称为发散的。
当然,也可按照范数定义矩阵的收敛性。
即若()lim 0k k A A →∞−=则称(){}k A 在范数||||i 意义下收敛于A 。
由三角不等式,可推知,,m n A B C ×∀∈有||||||||||||||A B A B −≥−。
《周国标师死接流道席010》之阳早格格创做背量战矩阵的范数的若搞易面导引(二)一. 矩阵范数的定义引进矩阵范数的本果与背量范数的缘由是相似的,正在许多场合需要“丈量”矩阵的“大小”,比圆矩阵序列的支敛,解线性圆程组时的缺面分解等,简曲的情况正在那里没有再复述.最简单料到的矩阵范数,是把矩阵m n A C ⨯∈不妨视为一个mn 维的背量(采与所谓“推曲”的变更),所以,曲瞅上可用mn C 上的背量范数去动做m n A C ⨯∈的矩阵范数.比圆正在1l -范数意思下,111||||||mnij i j A a ===∑∑()12tr()HAA =; (1.1)正在2l -范数意思下,12211||||||m n F ij i j A a ==⎛⎫= ⎪⎝⎭∑∑,(1.2)注意那里为了预防与以去的暗号殽杂,下标用“F ”,那样一个矩阵范数,称为Frobenius 范数,大概F-范数.不妨考证它们皆谦脚背量范数的3个条件.那么是可矩阵范数便那样办理了?果为数教上的任一定义皆要与其对付象的运算通联起去,矩阵之间有乘法运算,它正在定义范数时应给予体现,也即预计AB 的“大小”相对付于A B 与的“大小”闭系.定义1 设m n A C ⨯∈,对付每一个A ,如果对付应着一个真函数()N A ,记为||||A ,它谦脚以下条件:(1)非背性:||||0A ≥;(1a )正定性:||||0m n A O A ⨯=⇔=(2)齐次性:||||||||||,A A C ααα=∈;(3)三角没有等式:||A ||||||||||||,m n A B A B B C ⨯+≤+∀∈则称()||||N A A =为A 的广义矩阵范数.进一步,若对付,,m n n l m l C C C ⨯⨯⨯上的共类广义矩阵范数||||•,有(4)(矩阵相乘的)相容性:||A ||||||||||||AB A B ≤, n l B C ⨯∈, 则称()||||N A A =为A 的矩阵范数.咱们当前去考证前里(1.1)战(1.2)定义的矩阵范数是可合法?咱们那里只思量(1.2),把较简单的(1.1)的考证留给共教们,三角没有等式的考证.按列分块,记1212(,,,),(,,,)n n A a a a B b b b ==.对付上式中第2个括号内的诸项,应用Cauchy 没有等式,则有222||||||||2||||||||||||F F F F F A B A A B B +≤++2(||||||||)F F A B =+ (1.3) 于是,二边启圆,即得三角没有等式. 再考证矩阵乘法相容性.221111||||mlnn iksj i j k s a b ====⎛⎫⎛⎫≤ ⎪⎪⎝⎭⎝⎭∑∑∑∑ (那一步用了Cauchy 没有等式)22221111||||||||||||m nn l ik sj F F i k s j a b A B ====⎛⎫⎛⎫== ⎪ ⎪⎝⎭⎝⎭∑∑∑∑ (1.4) 可睹,矩阵相容性谦脚.那样便完毕了对付矩阵F-范数的考证.是没有是那样间接将背量范数使用到矩阵范数便不妨了吗?No!使用l ∞-范数于矩阵范数时便出了问题.如果11||||max ||ij i mj nA a ∞≤≤≤≤=,那么,那样的矩阵范数正在底下一个例子上便止短亨.设21122,21122A A A ⎛⎫⎛⎫=== ⎪ ⎪⎝⎭⎝⎭.果此,按上述矩阵∞-范数的定义,||||1,||A A ∞=2||||1,||||2A A ∞∞==,于是然而那是冲突的.所以简朴天将l ∞-范数使用于矩阵范数,是没有成止的.虽然那仅是一个反例,然而是数教的定义是没有成以有例中的.由此,咱们必须认识到,没有克没有及随便套用背量范数的形式去构制矩阵范数. 为此,咱们仅给出矩阵范数的定义是没有敷的,还需要钻研怎么样形成简曲的矩阵范数的要领.天然,您也不妨没有去思量形成要领,一个函数一个函数去试,只消谦脚条件便止.没有过那样搞的处事量太大,也很盲目.第二,正在本量预计时,往往矩阵与背量出当前共一个预计问题中,所以正在思量构制矩阵范数时,该当使它与背量范数相容.比圆要思量Ax 的“大小”,Ax 是一个背量,然而它由A 与x 相乘而得的,它与A 的“大小”战x 的“大小”的闭系怎么样? 那提出了二类范数相容的观念.定义2 对付于m n C ⨯上的矩阵范数||||M •战,m n C C 上的共类背量范数||||V •,如果创制||||||||||||,,m n n V M V Ax A x A C x C ⨯≤⋅∀∈∀∈ (1.5)则称矩阵范数||||M •与背量范数||||V •是相容的. 例1.1 不妨道明 12211||||||mnF ij i j A a ==⎛⎫= ⎪⎝⎭∑∑()12tr()HA A = 是与背量范数2||||•相容.究竟上,正在(1.2)中,与1n B x C ⨯=∈,那么 二. 矩阵算子范数当前给出一种构制矩阵范数的普遍要领,它不妨使构制出的矩阵范数与背量范数相容,天然,它也谦脚定义1确定的4个条件.定义3 设,m n C C 上的共类背量范数为||||V •,m n A C ⨯∈,定义正在m n C ⨯空间上的矩阵A 的由背量范数||||V •诱导给出的矩阵范数为||||||||max||||V V x VAx A x ≠= (2.1)不妨考证,那样定义出的矩阵范数||||V A 谦脚定义1确定的4个条件,共时又谦脚矩阵范数与背量范数相容性央供(定义2).由于有什么样的背量范数||||V •,便有什么样的矩阵范数,所以,那样的矩阵范数称为由背量范数诱导出的,简称诱导范数;又果为(2.1)本量上确定了一个函数(大概算子),故又称为算子范数.(2.1)给定的范数本量是觅供一个最劣化问题的最劣值,供目标函数||||||||V VAx x 的最大值,拘束条件是0x ≠,也便正在n C 空间中除本面中的面中,找一个n 维背量x ,使||||||||VVAx x 博得最大值.如果间接思量那样一个劣化问题,仍旧有艰易的. 不妨道明,它不妨下列等价办法定义,使问题的处理简朴.0||||||||max ||||V V x VAx A x ≠=||||1||||1||||max max ||||||||VVVV x x VAx Ax x ==== (2.2)究竟上, 分母上的||||V x 是一个正数(0x ≠), 那么根据背量范数的齐次性有上头第3个等号创制是果为背量||||Vx z x =为一个单位背量.底下咱们从表里上道明那样的矩阵范数||||V A 谦脚定义1确定的4个条件,共时又谦脚矩阵范数与背量范数相容性央供.定理2.1 由(2.1)大概(2.2)给定的m n C ⨯上的矩阵范数谦脚矩阵范数定义1的4个条件,且与相映的背量范数相容. 道明: 最先,矩阵范数与背量范数的相容性是没有易道明的,究竟上,对付||||V x =1, ||||1||||||||||||max ||||||||VV V V V V z A x A Az Ax ===≥, 果此,矩阵范数与背量范数的相容性条件(1.5)创制.咱们底下去考证(2.1)大概(2.2)谦脚矩阵范数的4个条件.那4个条件中,前2个也简单考证,果此那里只去观察第3,4个条件.三角没有等式的考证: 对付于任一m n B C ⨯∈矩阵相乘相容性的考证: 由(1.5),没有易有当0x ≠时,||||||||||||||||VV V VABx A B x ≤ 所以 0||||||||max||||||||||||VV V V x VABx AB A B x ≠=≤至此,证据了用算子范数确能给出谦脚矩阵范数定义战矩阵范数与背量范数的相容性 的矩阵范数.推论1 对付于n n C ⨯上的任一种背量诱导范数,皆有 ||||1||||max ||||1x I Ix === (2.3)然而是要注意的是,对付普遍的矩阵范数,对付任一背量n x C ∈,有故有 ||||1I ≥.比圆,||||F A 没有是诱导矩阵范数,所以 ||||1F I ≥. 三.几个时常使用的诱导矩阵范数上头的叙述标明,诱导矩阵范数与背量范数稀切相闭,有何种背量范数,便有什么样的诱导矩阵范数.底下便去简曲天构制几个时常使用的诱导矩阵范数.设m n A C ⨯∈.例3.1 设m n A C ⨯∈,由背量1l -范数诱导而去的最大列战诱导矩阵范数111||||max ||mi j j ni A a ≤≤==∑ (3.1)道明:按列分块,记12(,,,)n A a a a =,则由(3.1)战背量1l -范数的定义可知设12(,,,)n n n x x x x C =∈,且有1||||1x =果此, 111||||1||||max ||||x A Ax ==1max ||mij ji a =≤∑ (+) 另一圆里,采用k ,使得令0x 为第k 的单位背量(0,0,1,0,,0)Tk e =,那么012(,,,)T k k k mk Ax a a a a ==11101||||111||||max ||||||||||max ||mmik ij x ji i A Ax Ax a a ====≥==∑∑ (++)概括(+)与(++)可知, 由背量1l -范数诱导出的矩阵范数既是1||||A 的上界,又是其下界,果此必有(3.1).设m n A C ⨯∈,矩阵谱范数由2l -范数诱导得出的矩阵范数,定义为21||||max{|}H A A A λλ==是的特征值 (3.2)其中 1σ为A 的最大偶同值, 当n n A R ⨯∈时, 2||||A = (3.3)道明:最先由线性代数, H A A 是半正定矩阵, 究竟上,对付任一n x C ∈,有果此,H A A 的特性值皆为非背真数,记为 120n λλλ≥≥≥≥,而且H A A 具备n 个相互正接的,2l -范数等于1(即尺度化了的)特性背量(1)(2)(),,,n x x x ,它们分别对付应于特性值120n λλλ≥≥≥≥.故那组特性背量形成了一组尺度正接基,用它们可表示任一个范数2||||1x =的背量x :()1ni i i x x α==∑而且,由2||||1x =, 可得到 211ni i α==∑.那样, ()()()111()n n nHHi Hi i i i i i i i i A Ax A A x A Ax x αααλ======∑∑∑.由此22221122111||||||n n n i i λαλαλαλαλ=⎛⎫=+++≤= ⎪⎝⎭∑,也便是2||||Ax ≤由x 的任性性战算子范数的定义2221||||1||||max ||||x A Ax λ==≤ (*)另一圆里,由2||||1x =,而且与1λ对付应的特性背量(1)x ,思量 所以2(1)2221||||1||||max ||||||||x A Ax Ax λ==≥= (**)概括(*)战(**),由2l -范数诱导得出的矩阵范数应为21||||max{|}H A A A λλ==是的特征值.例3.3 设m n A C ⨯∈,l ∞-范数诱导得出的矩阵范数11||||max ||nij i mj A a ∞≤≤==∑ (3.4)道明:设12||||1(,,,),T n x x x x x =∞=且,即 max ||1i ix =.由算子范数,||||1||||max ||||x A Ax ∞∞∞==≤1max ||nij ij a =∑ (*)另一圆里,采用k ,使得 令12(,,,),T n y y y y =其中1,0||,0kj kj j kj kjif a a y if a a =⎧⎪=⎨≠⎪⎩,则 ||||max ||1j jy y ∞==,进而有 1**||**n kj j a Ay =⎛⎫ ⎪ ⎪ ⎪ ⎪ ⎪= ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭∑,由算子范数||||111||||max ||||||||||max ||nnkj ij x ij j A Ax Ay a a ∞∞∞∞====≥≥=∑∑. (**)概括(*)战(**),便得11||||max ||nij i mj A a ∞≤≤==∑.除了上述3种时常使用的矩阵范数中,Frobenius 范数虽然没有是算子范数,然而也时常所用,正在计划序列支敛等问题上是等价的.例3.4 设1234A -⎛⎫= ⎪-⎝⎭,供其百般矩阵范数.解: 1||||A =最大列战 = 6;||||A ∞=最大止战 = 7;|||| 5.477F A ==≈;四. 由矩阵范数推出的背量范数矩阵范数可由背量范数诱导,反过去,背量范数偶尔也可从矩阵范数推出.例4.1 设||||M •是n n C ⨯上的矩阵范数,任与n C 中的非整背量y ,则函数||||||||,H n V M x xy x C =∀∈ (4.1)是n C 上的背量范数,且矩阵范数||||M •与背量范数||||V •相容. 道明:欲证 ||||V x 是一个背量范数,只须考证它谦脚背量范数得个条件.非背性:当x ≠时,由于y非整,故||||||||0,H n V M x xy x C =>∀∈;当0x =时,H n n xy O ⨯=,故||||||||0H V M x xy ==. 齐次性:对付任一常数c C ∈,有 ||||||||||||||||||||H H V M M V cx cxy c xy c x ===.三角没有等式: 对付任性的,n x z C ∈,有 ||||||||V M x z =+.果此由背量范数的定义知,||||V x 是一个背量范数.底下再证二种范数的相容性.如果,n n n A C x C ⨯∈∈,那么 ||||||()||||()||||||||||||||||||H H H V M M M M M V Ax Ax y A xy A xy A x ==≤=. 可睹,矩阵范数||||M •与背量范数||||V •相容.五. 范数的若搞应用范数的应用很广大,那里只举2例. 1. 矩阵偶同性的条件对付于矩阵n n A C ⨯∈,是可根据其范数的大小,去判别的()I A -偶同性?判别一个矩阵的偶同性,本去没有便当(比圆预计A 的止列式的值是可非整,推断A 的诸列是可线性无闭等,均没有大简单),然而矩阵的范数的预计,如1||||,||||A A ∞,仍旧便当的.定理5.1 (Banach 引理)设矩阵n n A C ⨯∈,且对付矩阵n n C ⨯上的某种矩阵范数||||•,有||||1A <,则矩阵()I A ±非偶同,且有1||||||()||1||||I I A A --≤- (5.1)道明: 假设矩阵范数||||A 与背量范数||||x 相容.欲证矩阵()I A ±非偶同,可通过det()0I A ±≠.用反证法.假设det()0I A ±=,则齐次线性圆程组 ()0I A x ±= 有非整解0x ,即 于是, 00x Ax =.二边与范数 0000||||||||||||||||||||V V V V x Ax A x x =≤<其中末尾一个没有等号是由于 ||||1A <. 然而上式是冲突的,假设det()0I A ±=没有创制,进而矩阵()I A ±非偶同,故有顺.再由 1()()I A I A I -±±= 可得 11()()I A I I A A --±=±二边与范数,得111||()||||()||||||||()||||||I A I I A A I I A A ---±=±≤+± 再移项,有 1||()||(1||||)||||I A A I -±-≤ 进而 1||||||()||1||||I I A A -±≤-那正是咱们要念道明的.正在推演分解Ax b =的间接法的缺面分解时起要害的效率.请共教们自止道明底下类似的截止.定理5.2 设矩阵n n A C ⨯∈,且对付矩阵n n C ⨯上的某种矩阵范数||||•,有||||1A <,则2.近似顺矩阵的缺面——顺矩阵的摄动正在数值预计中,缺面无处没有正在,思量由于那些缺面存留而戴去的成果,是一项要害的课题.设矩阵n n A C ⨯∈的元素ij a 戴有缺面,(,1,2,,)ij a i j n δ=,则矩阵的真正在的值应为A A δ+,其中()ij A a δδ=称为缺面矩阵,又喊摄动矩阵.若A 为非偶同,其顺阵为1A -.问题是:1()A A δ-+与1A -的近似程度怎么样呢?大概者道,1()A A δ-+与1A -的“距离”大小为几?底下是回问上述问题的摄动定理.设矩阵n n A C ⨯∈非偶同,n n B C ⨯∈,且对付n n C ⨯上的某种矩阵范数||||•,有1||||1A B -<,则(1)A B +非偶同; (2)记11()F I I A B --=-+,那么 11||||||||1||||A B F A B --≤-; (3)11111||()||||||||||1||||A AB A B A A B ------+≤-. 道明:由于1||||1A B -<,所以1||||1A B --<.由定理 5.1,1()I A B -+非偶同,故1()A B A I A B -+=+非偶同.正在定理5.2中,将A 换成1A B --,即得(2). 又果为 11111()(())A A B I I A B A ------+=-+, 二边与范数,并利用(2)的论断,可得11111||||||()||||||1||||A B A A B A A B ------+≤-, 即可得到(3). □ 3.矩阵谱半径及其本量矩阵谱半径是一个要害的观念,正在特性值预计,广义顺矩阵,数值预计(特天正在数值线性代数)等表里中,皆占有极其要害的职位.定义4 设矩阵n n A C ⨯∈的n 个特性值为12,,,n λλλ(含沉根),称max ||i iλ为矩阵A 的谱半径,记为()A ρ. 闭于矩阵谱半径的最道明也是最要害的论断是,矩阵A 的谱半径没有超出其任一种矩阵范数.那个截止已经正在课堂上道明过了.动做训练,请共教们对付 1321i A i -⎛⎫= ⎪+⎝⎭考证那个论断.闭于矩阵谱半径的第2个要害论断是,如果矩阵A 为Hermite 矩阵,则2||||()A A ρ=.道明留给大家.虽然Hermite 矩阵的谱半径与其谱范数相等,然而是,普遍矩阵的谱半径与其谱范数大概出进很大.底下闭于矩阵谱半径的第3个要害论断,刻绘了谱半径与矩阵范数之间的另一种定量闭系.,定理5.4 设矩阵n n A C ⨯∈,对付任性正数ε,存留一种矩阵范数||||M •,使得道明: 根据Jordan 尺度型,对付n n A C ⨯∈,存留非偶同的n n P C ⨯∈,使如果记 12(,,,)n diag λλλΛ= 战123100000n I δδδδ-⎛⎫ ⎪ ⎪ ⎪ ⎪= ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭, 01i δ=或 则 Jordan 尺度型 J I =Λ+,其中12,,,n λλλ 为A 的特性值. 又记 21(1,,,,)n D diag εεε-=,则有1111()()PD A PD D P APD D JD Iε----===Λ+1122331n n λεδλεδλεδεδλ-⎛⎫ ⎪ ⎪ ⎪= ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭,记 S PD =,那么S 为非偶同,且有111||||||||()S AS I A ερε-=Λ+≤+.另一圆里,简单考证,11||||||||M A S AS -= 是n n C ⨯上的矩阵范数,所以11||||||||()M A S AS A ρε-=≤+. □5.背量战矩阵范数正在供解Ax b =的间接法的缺面分解中应用那一真量尔正在课堂上道的比较小心,那里便略去了.。
理解矩阵范数与距离矩阵范数是矩阵理论中的一个重要概念,它可以用来度量矩阵的特征和性质。
矩阵距离是基于矩阵范数来定义的一种距离度量方法。
在本文中,我们将深入探讨矩阵范数和矩阵距离的概念,并解释它们的应用和意义。
一、矩阵范数矩阵范数是对矩阵进行度量的一种方式,它可以衡量矩阵的重要特征。
在矩阵范数中,有几个常见的范数定义,包括最大范数、F范数、核范数等。
1. 最大范数最大范数是矩阵的一种常见范数定义方法,也称为无穷范数。
对于一个矩阵A,它的最大范数记作||A||∞,表示A的所有元素中绝对值最大的那个元素。
2. F范数F范数是另一种常见的矩阵范数定义方法,也称为Frobenius范数。
对于一个矩阵A,它的F范数记作||A||F,表示A的所有元素的平方和的平方根。
3. 核范数核范数是在矩阵奇异值分解(SVD)的基础上定义的一种范数。
对于一个矩阵A,它的核范数记作||A||*,表示A的奇异值的和。
二、矩阵距离矩阵距离是基于矩阵范数来定义的一种距离度量方法,它可以用来衡量两个矩阵之间的差异或相似性。
常见的矩阵距离包括欧氏距离、马氏距离等。
1. 欧氏距离欧氏距离是矩阵之间的一种常见距离度量方法,它在空间中衡量两个点之间的距离。
对于两个矩阵A和B,它们的欧氏距离记作d(A, B),表示二者之间的平方和的平方根。
2. 马氏距离马氏距离是一种考虑矩阵协方差的距离度量方法,它在多变量统计分析中被广泛应用。
对于两个矩阵A和B,它们的马氏距离记作d(A,B),表示二者之间的平方差的平方根。
三、应用和意义矩阵范数和矩阵距离在数学和工程领域中有着广泛的应用和意义。
1. 矩阵范数的应用矩阵范数在矩阵分析、线性代数、最优化等领域具有重要作用。
通过矩阵范数,我们可以衡量矩阵的条件数、稳定性和收敛速度等属性,并为矩阵计算提供基础。
2. 矩阵距离的应用矩阵距离在图像处理、模式识别、数据挖掘等领域扮演着重要的角色。
通过矩阵距离,我们可以度量不同图像或数据之间的相似性,并进行分类、聚类等任务。
向量和矩阵的范数的若干难点导引矩阵范数的定义引入矩阵范数的原因与向量范数的理由是相似的,在许多场合需要“测量”矩阵的“大小”,比如矩阵序列的收敛,解线性方程组时的误差分析等,具体的情况在这里不再复述。
最容易想到的矩阵范数,是把矩阵m nA C ⨯∈可以视为一个mn 维的向量(采用所谓“拉直”的变换),所以,直观上可用mn C上的向量范数来作为m nA C⨯∈的矩阵范数。
比如在1l -范数意义下,111||||||mniji j A a===∑∑()12tr()HA A =; (1.1)在2l -范数意义下,12211||||||mnF iji j A a ==⎛⎫=⎪⎝⎭∑∑, (1.2) 注意这里为了避免与以后的记号混淆,下标用“F ”,这样一个矩阵范数,称为Frobenius范数,或F-范数。
可以验证它们都满足向量范数的3个条件。
那么是否矩阵范数就这样解决了?因为数学上的任一定义都要与其对象的运算联系起来,矩阵之间有乘法运算,它在定义范数时应予以体现,也即估计AB 的“大小”相对于A B 与的“大小”关系。
定义1 设m nA C ⨯∈,对每一个A ,如果对应着一个实函数()N A ,记为||||A ,它满足以下条件:(1)非负性:||||0A ≥;(1a )正定性:||||0m nA O A ⨯=⇔=(2)齐次性:||||||||||,A A C ααα=∈;(3)三角不等式:||A ||||||||||||,m nA B A B B C ⨯+≤+∀∈则称()||||N A A =为A 的广义矩阵范数。
进一步,若对,,m nn l m l C C C ⨯⨯⨯上的同类广义矩阵范数||||•,有(4)(矩阵相乘的)相容性:||A ||||||||||||AB A B ≤, n lB C ⨯∈,则称()||||N A A =为A 的矩阵范数。
我们现在来验证前面(1.1)和(1.2)定义的矩阵范数是否合法?我们这里只考虑(1.2),把较容易的(1.1)的验证留给同学们,三角不等式的验证。
按列分块,记1212(,,,),(,,,)n n A a a a B b b b ==。
222112||)(,),(),(||||||F n n F b a b a b a B A +++=+ 2222222211||||||||||||n n b a b a b a ++++++=()()22121222||||||||||||||||n n a b a b ≤++++()()()2222122121222122||||||||2||||||||||||||||||||||||n n n n a a a b a b b b =++++++++对上式中第2个括号内的诸项,应用Cauchy 不等式,则有222||||||||2||||||||||||F F F F F A B A A B B +≤++2(||||||||)F F A B =+ (1.3)于是,两边开方,即得三角不等式。
再验证矩阵乘法相容性。
222111111||||||||m l nm ln F ik kjik ki i j k i j k AB a b a b ======⎛⎫=≤ ⎪⎝⎭∑∑∑∑∑∑221111||||m ln nik sj i j k s a b ====⎛⎫⎛⎫≤ ⎪⎪⎝⎭⎝⎭∑∑∑∑ (这一步用了Cauchy 不等式) 22221111||||||||||||m n n lik sj F F i k s j a b A B ====⎛⎫⎛⎫== ⎪ ⎪⎝⎭⎝⎭∑∑∑∑ (1.4)可见,矩阵相容性满足。
这样就完成了对矩阵F-范数的验证。
是不是这样直接将向量范数运用到矩阵范数就可以了吗?No!运用l ∞-范数于矩阵范数时便出了问题。
如果11||||max ||ij i m j nA a ∞≤≤≤≤=,那么,这样的矩阵范数在下面一个例子上就行不通。
设21122,21122A A A ⎛⎫⎛⎫=== ⎪ ⎪⎝⎭⎝⎭。
因此,按上述矩阵∞-范数的定义,||||1,||A A ∞=2||||1,||||2A A ∞∞==,于是22||||||||||||||||1A A A A A ∞∞∞∞==⋅≤=但这是矛盾的。
所以简单地将l ∞-范数运用于矩阵范数,是不可行的。
虽然这仅是一个反例,但是数学的定义是不可以有例外的。
由此,我们必须认识到,不能随便套用向量范数的形式来构造矩阵范数。
为此,我们仅给出矩阵范数的定义是不够的,还需要研究如何构成具体的矩阵范数的方法。
当然,你也可以不去考虑构成方法,一个函数一个函数去试,只要满足条件就行。
不过这样做的工作量太大,也很盲目。
第二,在实际计算时,往往矩阵与向量出现在同一个计算问题中,所以在考虑构造矩阵范数时,应该使它与向量范数相容。
比如要考虑Ax 的“大小”,Ax 是一个向量,但它由A 与x 相乘而得的,它与A 的“大小”和x 的“大小”的关系如何? 这提出了两类范数相容的概念。
定义2 对于m nC⨯上的矩阵范数||||M •和,m nC C 上的同类向量范数||||V •,如果成立||||||||||||,,m n n V M V Ax A x A C x C ⨯≤⋅∀∈∀∈ (1.5)则称矩阵范数||||M •与向量范数||||V •是相容的。
例1.1 可以证明 12211||||||m n F ij i j A a ==⎛⎫= ⎪⎝⎭∑∑()12tr()HA A = 是与向量范数2||||•相容。
事实上,在(1。
2)中,取1n B x C ⨯=∈,那么 22||||||||||||||||||||||||F F F F Ax AB A B A x =≤=一. 矩阵算子范数现在给出一种构造矩阵范数的一般方法,它可以使构造出的矩阵范数与向量范数相容,当然,它也满足定义1规定的4个条件。
定义3 设,mnC C 上的同类向量范数为||||V •,m n A C ⨯∈,定义在m nC ⨯空间上的矩阵A的由向量范数||||V •诱导给出的矩阵范数为||||||||max||||VV x VAx A x ≠= (2.1)可以验证,这样定义出的矩阵范数||||V A 满足定义1规定的4个条件,同时又满足矩阵范数与向量范数相容性要求(定义2)。
由于有什么样的向量范数||||V •,就有什么样的矩阵范数,所以,这样的矩阵范数称为由向量范数诱导出的,简称诱导范数;又因为(2.1)实际上规定了一个函数(或算子),故又称为算子范数。
(2.1)给定的范数实际是寻求一个最优化问题的最优值,求目标函数||||||||VVAx x 的最大值,约束条件是0x ≠,也就在nC 空间中除原点外的点中,找一个n 维向量x ,使||||||||V VAx x 取得最大值。
如果直接考虑这样一个优化问题, 还是有困难的. 可以证明,它可以下列等价方式定义, 使问题的处理简单。
0||||||||max ||||V V x V Ax A x ≠=||||1||||1||||max max ||||||||V V VV x x VAx Ax x ==== (2.2)事实上, 分母上的||||V x 是一个正数(0x ≠), 那么根据向量范数的齐次性有000||||1||||1||||1maxmax max max max ||||||||||||V V V V V x x x z x V V V VV Ax x Ax A Az Ax x x x ≠≠≠==⎛⎫==== ⎪⎝⎭ 上面第3个等号成立是因为向量 ||||Vxz x = 为一个单位向量。
下面我们从理论上证明这样的矩阵范数||||V A 满足定义1规定的4个条件,同时又满足矩阵范数与向量范数相容性要求。
定理2。
1 由(2.1)或(2.2)给定的m nC ⨯上的矩阵范数满足矩阵范数定义1的4个条件,且与相应的向量范数相容。
证明: 首先,矩阵范数与向量范数的相容性是不难证明的,事实上, 对||||V x =1,||||1||||||||||||max ||||||||V V V V V V z A x A Az Ax ===≥, 因此,矩阵范数与向量范数的相容性条件(1.5)成立。
我们下面来验证(2.1)或(2.2)满足矩阵范数的4个条件。
这4个条件中,前2个也容易验证,因此这里只来考察第3,4个条件。
三角不等式的验证: 对于任一m nB C⨯∈()||||1||||1||||1||||max ||()||max ||||max ||||||||x x x A B A B x Ax Bx A B ===+=+=+≤+||||1||||1max ||||max ||||||||||||x x Ax Bx A B ===+=+矩阵相乘相容性的验证: 由(1.5),不难有||||||||||||||||||||||||V V V V V V ABx A Bx A B x ≤≤当0x ≠时,||||||||||||||||VV V VABx A B x ≤所以 0||||||||max||||||||||||VV V V x VABx AB A B x ≠=≤ 至此,证实了用算子范数确能给出满足矩阵范数定义和矩阵范数与向量范数的相容性的矩阵范数。
推论1 对于n nC⨯上的任一种向量诱导范数,都有 ||||1||||max ||||1x I Ix === (2。
3)但是要注意的是,对一般的矩阵范数,对任一向量nx C ∈,有 ||||||||||||||||x Ix I x =≤ 故有 ||||1I ≥。
比如,||||F A 不是诱导矩阵范数,所以 ||||1F I ≥。
三.几个常用的诱导矩阵范数上面的论述表明,诱导矩阵范数与向量范数密切相关,有何种向量范数,就有什么样的诱导矩阵范数。
下面就来具体地构造几个常用的诱导矩阵范数。
设m nA C ⨯∈。
例3.1 设m nA C⨯∈,由向量1l -范数诱导而来的最大列和诱导矩阵范数111||||max ||mi jj ni A a≤≤==∑ (3.1)证明:按列分块,记12(,,,)n A a a a =,则由(3.1)和向量1l -范数的定义可知111||||max ||||j j nA a ≤≤= 设12(,,,)n n n x x x x C =∈,且有1||||1x =1||||Ax 111111||||||||mnmnnm ij j ij j j ij i j i j j i a x a x x a ======⎛⎫=≤= ⎪⎝⎭∑∑∑∑∑∑()()1max ||||max ||nij jijjjj a x a =≤=∑因此, 111||||1||||max ||||x A Ax ==1max||mijji a=≤∑ (+)另一方面,选取k ,使得11||max ||mmikij ji i aa ===∑∑令0x 为第k 的单位向量(0,0,1,0,,0)T k e =,那么012(,,,)T k k k mk Ax a a a a ==11101||||111||||max ||||||||||max ||mmikij x ji i A Ax Ax aa ====≥==∑∑ (++)综合(+)与(++)可知, 由向量1l -范数诱导出的矩阵范数既是1||||A 的上界,又是其下界, 因此必有(3.1).例3. 2 设m nA C⨯∈,矩阵谱范数由2l -范数诱导得出的矩阵范数,定义为21||||max{|}HA A A λλ==是的特征值 (3.2)其中 1σ为A 的最大奇异值, 当n nA R⨯∈时, 2||||A =证明:首先由线性代数, HA A 是半正定矩阵, 事实上,对任一nx C ∈,有22(,)()()||||0H H H H x A Ax x A Ax Ax Ax Ax ===≥因此, HA A 的特征值都为非负实数,记为 120n λλλ≥≥≥≥,而且H A A 具有n 个相互正交的,2l -范数等于1(即标准化了的)特征向量(1)(2)(),,,n x xx ,它们分别对应于特征值120n λλλ≥≥≥≥。