机械振动测试
- 格式:ppt
- 大小:2.10 MB
- 文档页数:95

第三章 机械振动与机械波自我测试题一、选择题1、谐振动是一种什么样的运动?A 匀加速运动;B 匀减速运动;C 匀速运动;D 变加速运动。
2、下列振动中,哪个不是谐振动?A 弹簧振子的振动;B 当摆角不大(<50)时的单摆的振动;C 位移方程满足x=sin(ωt+φ)的振动;D 拍皮球时皮球的振动。
3、一质点作上下方向的谐振动,设向上为正方向。
当质点在平衡位置开始向上振动,则初位相为:A 0;B 2π;C 2π-;D 3π 4、当一物体系在一弹簧上作振动,振幅为A ,无阻尼,则:A 当位移是±A ,它的动能最大;B 在运动过程中它的总机械能有改变;C 在任一时刻其势能不变;D 当位移为零时它的势能为最小。
5、有一质量为4kg 的物体,连在一弹簧上,在垂直方向作简谐振动,振幅是1米。
当物体上升到最高点时为自然长度。
那么物体在最高点时的弹性势能、动能、重力势能之和为:(设弹簧伸到最长时重力势能为零,并取g= l0m/s 2)A 60J ;B 40J ;C 20J ;D 80J 。
6、某质点参与x 1=l0cos(πt -π/2)cm 及x 2=20cos(πt+π/2)cm 两个同方向的谐振动,则合成振动的振幅为:A 20cm ;B l0cm ;C 30cm ;D lcm 。
7、设某列波的波动方程为y=l0sin(10πt -x/100)cm ,在波线上x 等于一个波长处的点的位移方程为:A y= 10sin(10πt - 2π);B y= l0sin10πt ;C y= 20sin5πt ;D y= l0cos(l0πt - 2π).8、已知波动方程为y=0.05sin(l 0πt-πx )cm ,时间单位为秒,当t=T/4时,波源振动速度V 应为:A V= 0.5π;B V=-0.5π2;C V= 0.5πcos10πt ;D V= 0。
9、已知一个lkg 的物体作周期为0.5s 的谐振动,它的能量为2π2J ,则其振幅为:A 2m ;B 0.5m ;C 0.25m ;D 0.2m 。
第1篇一、引言随着工业自动化程度的不断提高,工厂生产过程中产生的振动问题日益受到重视。
振动不仅会影响设备的正常运行,还会对操作人员的安全和健康造成威胁。
为了确保工厂生产的安全和高效,本报告对工厂振动进行了系统测试,以了解振动源、振动传播路径以及振动对设备的影响,为振动控制提供科学依据。
二、实验目的1. 了解工厂振动产生的来源及传播路径。
2. 测量不同区域的振动强度和频率。
3. 分析振动对设备的影响。
4. 为振动控制提供科学依据。
三、实验设备与仪器1. 振动测试仪:用于测量振动强度和频率。
2. 激光测距仪:用于测量设备与振动源的距离。
3. 摄像头:用于观察振动现象。
4. 计算机软件:用于数据处理和分析。
四、实验方法1. 确定测试点:根据工厂布局,选取具有代表性的测试点,包括振动源附近、振动传播路径上以及设备附近。
2. 测试振动强度和频率:使用振动测试仪分别测量各个测试点的振动强度和频率。
3. 测量设备与振动源的距离:使用激光测距仪测量设备与振动源的距离。
4. 观察振动现象:使用摄像头观察振动现象,记录振动形态和频率。
5. 数据处理和分析:将测试数据输入计算机软件,进行数据处理和分析。
五、实验结果与分析1. 振动源:通过测试发现,工厂振动的主要来源为机械设备运行、物料运输以及空气流动等。
2. 振动传播路径:振动主要沿地面、墙壁以及设备本身传播。
3. 振动强度和频率:不同区域的振动强度和频率存在差异,振动源附近振动强度较大,频率较高;振动传播路径上振动强度逐渐减弱,频率降低;设备附近振动强度较小,频率较低。
4. 振动对设备的影响:振动可能导致设备疲劳、磨损,甚至损坏。
长期处于高振动环境下,设备的使用寿命将大大缩短。
六、振动控制措施1. 优化设备布局:将振动源与设备保持一定距离,减少振动传播。
2. 使用减振设备:在振动源附近安装减振垫、减振器等,降低振动强度。
3. 改善物料运输方式:采用低速、平稳的运输方式,减少物料运输过程中的振动。
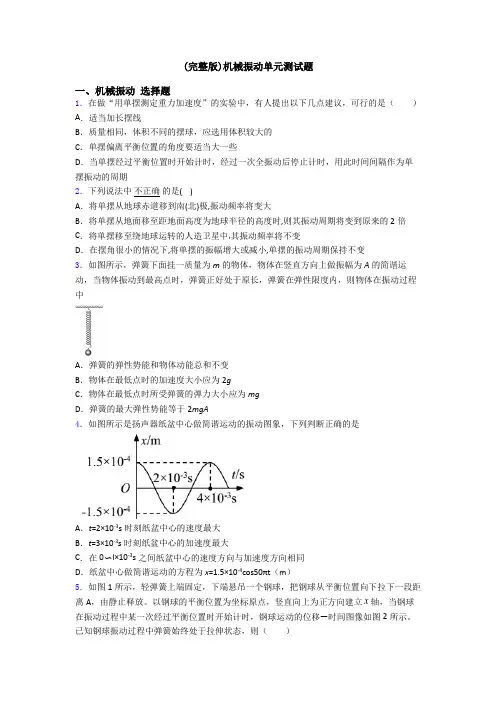
选修1高中物理《机械振动》测试题(含答案)一、机械振动 选择题1.如图所示,将可视为质点的小物块用轻弹簧悬挂于拉力传感器上,拉力传感器固定于天花板上,将小物块托起一定高度后释放,拉力传感器记录了弹簧拉力F 随时间t 变化的关系如图所示。
以下说法正确的是A .t 0时刻弹簧弹性势能最大B .2t 0站时刻弹簧弹性势能最大C .032t 时刻弹簧弹力的功率为0D .032t 时刻物体处于超重状态 2.如图为某简谐运动图象,若t =0时,质点正经过O 点向b 运动,则下列说法正确的是( )A .质点在0.7 s 时的位移方向向左,且正在远离平衡位置运动B .质点在1.5 s 时的位移最大,方向向左,在1.75 s 时,位移为1 cmC .质点在1.2 s 到1.4 s 过程中,质点的位移在增加,方向向左D .质点从1.6 s 到1.8 s 时间内,质点的位移正在增大,方向向右3.甲、乙两单摆的振动图像如图所示,由图像可知A .甲、乙两单摆的周期之比是3:2B .甲、乙两单摆的摆长之比是2:3C .t b 时刻甲、乙两摆球的速度相同D .t a 时刻甲、乙两单摆的摆角不等4.下列叙述中符合物理学史实的是( )A .伽利略发现了单摆的周期公式B .奥斯特发现了电流的磁效应C .库仑通过扭秤实验得出了万有引力定律D .牛顿通过斜面理想实验得出了维持运动不需要力的结论5.如图所示,将小球甲、乙、丙(都可视为质点)分别从A、B、C三点由静止同时释放,最后都到达竖直面内圆弧的最低点D,其中甲是从圆心A出发做自由落体运动,乙沿弦轨道从一端B到达最低点D,丙沿圆弧轨道从C点运动到D,且C点很靠近D点,如果忽略一切摩擦阻力,那么下列判断正确的是()A.丙球最先到达D点,乙球最后到达D点B.甲球最先到达D点,乙球最后到达D点C.甲球最先到达D点,丙球最后到达D点D.甲球最先到达D点,无法判断哪个球最后到达D点6.如图所示是扬声器纸盆中心做简谐运动的振动图象,下列判断正确的是A.t=2×10-3s时刻纸盆中心的速度最大B.t=3×10-3s时刻纸盆中心的加速度最大C.在0〜l×10-3s之间纸盆中心的速度方向与加速度方向相同D.纸盆中心做简谐运动的方程为x=1.5×10-4cos50πt(m)7.在做“用单摆测定重力加速度”的实验中,有人提出以下几点建议,可行的是()A.适当加长摆线B.质量相同,体积不同的摆球,应选用体积较大的C.单摆偏离平衡位置的角度要适当大一些D.当单摆经过平衡位置时开始计时,经过一次全振动后停止计时,用此时间间隔作为单摆振动的周期8.如右图甲所示,水平的光滑杆上有一弹簧振子,振子以O点为平衡位置,在a、b两点之间做简谐运动,其振动图象如图乙所示.由振动图象可以得知( )A.振子的振动周期等于t1B.在t=0时刻,振子的位置在a点C.在t =t 1时刻,振子的速度为零D .从t 1到t 2,振子正从O 点向b 点运动9.如图所示,在一条张紧的绳子上悬挂A 、B 、C 三个单摆,摆长分别为L 1、L 2、L 3,且L 1<L 2<L 3,现将A 拉起一较小角度后释放,已知当地重力加速度为g ,对释放A 之后较短时间内的运动,以下说法正确的是( )A .C 的振幅比B 的大B .B 和C 的振幅相等 C .B 的周期为2π2L gD .C 的周期为2π1L g10.沿某一电场方向建立x 轴,电场仅分布在-d ≤x ≤d 的区间内,其电场场强与坐标x 的关系如图所示。
机械结构的振动测试与模态分析机械结构的振动是指在运动或工作过程中,由于受到外界激励或内部失稳因素的影响而出现的周期性或非周期性的振动现象。
振动不仅会影响机械结构的正常运行,还可能导致结构疲劳、损坏,甚至产生严重事故。
因此,了解机械结构的振动特性,进行振动测试和模态分析,对于结构设计、改进和维护具有重要意义。
1. 振动测试振动测试是通过实验手段对机械结构的振动特性进行测量和分析的过程。
常见的振动测试手段包括加速度传感器、速度传感器、位移传感器等。
通过这些传感器,可以测量到结构在不同频率范围内的振动加速度、振动速度和振动位移等参数。
振动测试不仅可以定量地描述结构的振动特性,还可以研究振动的传播路径、频谱特性和共振现象等。
2. 模态分析模态分析是对机械结构的振动特性进行分析和研究的过程。
模态分析的目的是确定结构的振动模态,即结构的固有频率、振型和阻尼等参数。
通过模态分析,可以了解机械结构在不同频率下的振动特性,并确定结构中可能存在的共振点和振动节点。
同时,模态分析还可以帮助设计师优化结构的设计,减小结构的振动幅值,提高结构的工作效率和可靠性。
3. 应用案例以汽车底盘为例,进行振动测试和模态分析的应用。
在汽车行驶过程中,底盘承受着来自路面的冲击和车辆运动的振动。
通过振动测试,可以测量到底盘在不同行驶速度下的振动加速度和振动速度等参数。
通过模态分析,可以确定底盘的固有频率和振型,判断底盘是否在某些特定频率下容易出现共振现象。
根据振动测试和模态分析的结果,可以对底盘的结构进行优化,提高底盘的刚度和减小噪声,提高驾驶的舒适性和汽车的安全性能。
4. 振动测试与模态分析的意义振动测试与模态分析对于机械结构的设计、改进和维护具有重要意义。
通过振动测试,可以了解机械结构在不同工况下的振动特性,及时发现结构的振动异常和故障等。
通过模态分析,可以确定结构的固有频率和振型,为结构的优化设计提供依据。
同时,振动测试与模态分析还可以帮助工程师评估结构的可靠性和耐久性,减小结构的振动幅值,提高结构的工作效率和可靠性。

机械振动测量的激光干涉技术原理及其应用一、激光干涉技术概述1.1 激光干涉技术简介激光干涉技术是一种基于激光干涉现象的测量技术,通过利用激光光束的干涉效应,可以实现对目标物体的形状、表面特征以及运动状态等参数的测量。
激光干涉技术具有高精度、非接触和实时性等优势,被广泛应用于机械振动测量领域。
1.2 机械振动测量的意义机械振动测量是研究和评估机械系统动态性能的重要手段。
通过对机械振动的测量和分析,可以了解机械系统的结构特性、工作状态以及可能存在的故障或缺陷。
因此,机械振动测量在机械设计、故障诊断和结构动力学研究等领域具有广泛的应用前景。
二、激光干涉技术测量原理2.1 光的干涉原理光的干涉是指两个或多个光波相互叠加时产生的明暗交替的干涉条纹。
干涉条纹的出现是由于光波的相位差引起的,根据相位差的不同,干涉条纹会呈现出不同的明暗程度。
2.2 激光干涉技术测量原理在机械振动测量中,通常使用Michelson干涉仪或Fizeau干涉仪来实现激光干涉测量。
这些干涉仪利用激光光束的相干性和干涉效应来测量目标物体的振动情况。
激光干涉技术的基本原理是:将激光光束分成两束,分别射向目标物体和参考面,经过反射后再次汇合成一束光。
由于目标物体的振动,其表面会引起光程差的变化,从而产生干涉条纹。
通过对干涉条纹的分析和处理,可以得到目标物体的振动参数。
三、激光干涉技术的应用3.1 机械结构振动测试激光干涉技术可以用于对机械结构的振动进行测量。
通过将激光束射向机械结构表面,并利用干涉条纹的变化来获取结构的振动频率、振幅等参数,从而评估结构的稳定性和振动特性。
3.2 高精度位移测量利用激光干涉技术可以实现对物体位移的测量。
通过测量干涉条纹的移动情况,可以获取物体的位移信息,达到亚微米甚至纳米级的测量精度。
这在精密加工和微观物体测量等领域具有重要的应用价值。
3.3 动态应变测量激光干涉技术还可以实现对物体动态应变的测量。
当物体受到外力作用引起应变时,其表面形状会发生变化,从而改变干涉条纹的分布情况。
机械振动测试标准嘿,朋友们!咱今天来聊聊机械振动测试标准这档子事儿。
你说这机械振动啊,就好比是机器的“心跳”。
咱人要是心跳不正常了,那可得出大问题,机器也一样啊!那怎么知道机器的“心跳”正不正常呢?这就得靠机械振动测试标准啦!想象一下,机器在工作的时候,那是不停地动啊,要是没有个标准来衡量,咱怎么知道它是在正常工作还是在“闹脾气”呢?这标准就像是一把尺子,能准确地量出振动的大小、频率等等关键信息。
比如说吧,有的机器振动得特别厉害,就像人在那疯狂抖腿一样,这能正常吗?肯定不行啊!那这个时候,我们就得按照标准来判断,是不是哪里出问题啦,该修就得赶紧修,不然指不定啥时候就“撂挑子”了。
而且啊,不同的机器,那标准还不一样呢!就像每个人的性格不一样似的。
有的机器比较“娇气”,振动稍微大一点就不行;有的机器就比较“皮实”,能承受的振动范围就大一些。
这可得搞清楚,不然用错了标准,那不就闹笑话了嘛!咱再说说这标准是怎么来的。
那可不是随随便便就定下来的,那是经过无数次的实验、研究才确定的。
就像咱学走路一样,得一步一步来,慢慢摸索出最适合的方法。
这中间得耗费多少人力、物力啊!你看那些搞研究的人,整天对着机器捣鼓,就为了能让这标准更精确、更实用。
他们就像一群细心的医生,给机器“看病”,找出问题,然后开出“药方”。
那咱普通人在生活中怎么用到这机械振动测试标准呢?比如说你家有个洗衣机,用着用着感觉声音不对劲,振动也特别大。
这时候你就可以想想,是不是不符合标准啦?要不要找人来修修?还有啊,那些生产机器的厂家,要是不按照标准来生产,那生产出来的东西能好用吗?肯定不行啊!那不是坑消费者嘛!所以说,这标准可重要了,关系到我们每个人的生活呢!咱再回过头来想想,要是没有这机械振动测试标准,那这世界得乱成啥样啊?机器都不知道啥时候会出问题,说不定哪天就来个大爆炸,那多吓人啊!所以啊,咱得好好感谢那些制定标准的人,是他们让我们的生活更有保障。
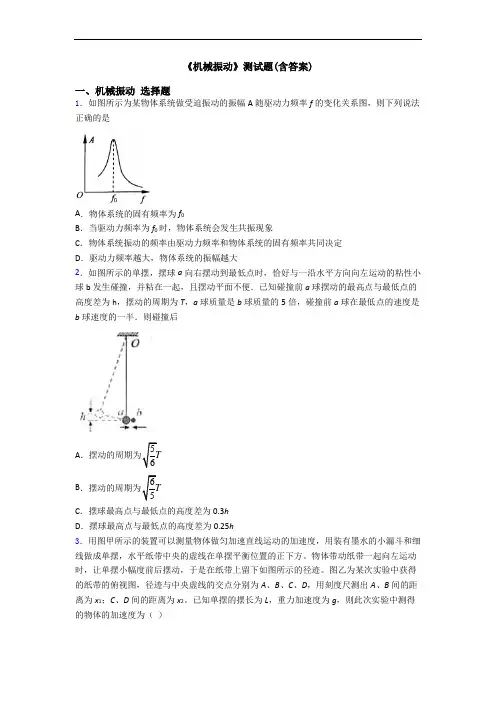
《机械振动》测试题(含答案)一、机械振动选择题1.如图所示为某物体系统做受迫振动的振幅A随驱动力频率f的变化关系图,则下列说法正确的是A.物体系统的固有频率为f0B.当驱动力频率为f0时,物体系统会发生共振现象C.物体系统振动的频率由驱动力频率和物体系统的固有频率共同决定D.驱动力频率越大,物体系统的振幅越大2.如图所示的单摆,摆球a向右摆动到最低点时,恰好与一沿水平方向向左运动的粘性小球b发生碰撞,并粘在一起,且摆动平面不便.已知碰撞前a球摆动的最高点与最低点的高度差为h,摆动的周期为T,a球质量是b球质量的5倍,碰撞前a球在最低点的速度是b球速度的一半.则碰撞后A 5 6 TB 6 5 TC.摆球最高点与最低点的高度差为0.3hD.摆球最高点与最低点的高度差为0.25h3.用图甲所示的装置可以测量物体做匀加速直线运动的加速度,用装有墨水的小漏斗和细线做成单摆,水平纸带中央的虚线在单摆平衡位置的正下方。
物体带动纸带一起向左运动时,让单摆小幅度前后摆动,于是在纸带上留下如图所示的径迹。
图乙为某次实验中获得的纸带的俯视图,径迹与中央虚线的交点分别为A、B、C、D,用刻度尺测出A、B间的距离为x1;C、D间的距离为x2。
已知单摆的摆长为L,重力加速度为g,则此次实验中测得的物体的加速度为()A .212()x x gLπ-B .212()2x x gLπ-C .212()4x x gLπ-D .212()8x x gLπ-4.如图所示,弹簧下面挂一质量为m 的物体,物体在竖直方向上做振幅为A 的简谐运动,当物体振动到最高点时,弹簧正好处于原长,弹簧在弹性限度内,则物体在振动过程中A .弹簧的弹性势能和物体动能总和不变B .物体在最低点时的加速度大小应为2gC .物体在最低点时所受弹簧的弹力大小应为mgD .弹簧的最大弹性势能等于2mgA5.在“用单摆测定重力加速度”的实验中,用力传感器测得摆线的拉力大小F 随时间t 变化的图象如图所示,已知单摆的摆长为l ,则重力加速度g 为( )A .224l tπB .22l t πC .2249l t πD .224l tπ6.如图所示的弹簧振子在A 、B 之间做简谐运动,O 为平衡位置,则下列说法不正确的是( )A .振子的位移增大的过程中,弹力做负功B .振子的速度增大的过程中,弹力做正功C .振子的加速度增大的过程中,弹力做正功D .振子从O 点出发到再次回到O 点的过程中,弹力做的总功为零7.质点做简谐运动,其x —t 关系如图,以x 轴正向为速度v 的正方向,该质点的v —t 关系是( )A .B .C .D .8.某质点做简谐运动,其位移随时间变化的关系式为5sin 4x t π=(cm) ,则下列关于质点运动的说法中正确的是( )A .质点做简谐运动的振幅为 10cmB .质点做简谐运动的周期为 4sC .在 t=4s 时质点的加速度最大D .在 t=4s 时质点的速度最大9.如图所示,质量为A m 的物块A 用不可伸长的细绳吊着,在A 的下方用弹簧连着质量为B m 的物块B ,开始时静止不动。
机械振动的模态测试与振动分析方法研究1. 引言机械振动是工程领域中常见的问题之一,振动的产生和传播会对设备的性能和寿命产生不良影响。
因此,了解机械振动的模态特性以及相应的振动分析方法对工程设计和故障诊断具有重要意义。
2. 模态测试模态测试是研究结构振动特性的关键方法之一。
它通过测量结构在不同模态下的固有频率、振型和阻尼等参数来分析结构的振动特性。
常见的模态测试方法包括频率响应法、冲击法和激励法等。
2.1 频率响应法频率响应法是通过激励结构的某个位置,测量其他位置的响应来确定结构的固有频率和振型。
该方法在实际应用中具有较高的精度和可靠性,适用于大型结构和具有小阻尼特性的系统。
2.2 冲击法冲击法是通过给结构施加短时冲击力,通过测量结构的响应来分析结构的振动特性。
该方法相比于频率响应法,更适用于小型结构和阻尼较大的系统。
然而,冲击法所提供的模态参数相对较少,且信号处理较为复杂。
2.3 激励法激励法是通过施加不同频率的激励信号,测量结构的响应来确定结构的固有频率和振型。
与频率响应法相比,激励法可以同时获取多个模态的特性参数,适用于需要同时获取多个模态信息的情况。
3. 振动分析方法振动分析方法是对机械振动信号进行处理和分析的关键技术,可帮助工程师理解振动现象的原因,并进行故障诊断和预防。
3.1 频谱分析频谱分析是将时域信号转换为频域信号的一种方法,常用的频谱分析方法包括傅里叶变换、小波变换和短时傅里叶变换等。
通过频谱分析,可以得到振动信号的频率成分和振幅分布,进而判断振动源和频率特征。
3.2 阶次分析阶次分析是分析旋转机械振动信号的一种方法,通过将时域信号转换为阶次域信号,可获得振动信号与旋转频率的相关性。
阶次分析可以用于旋转机械的故障诊断和动态性能评估。
3.3 模态分析模态分析是将机械振动信号分解为不同模态的一种方法,通过计算模态参数如固有频率、阻尼和振型等,可以推断结构的刚度、质量和阻尼特性。
模态分析常用的方法包括主成分分析、奇异值分解和有限元法。
一、选择题1.如图所示为一个单摆在地面上做受迫振动的共振曲线(振幅A 与驱动力频率f 的关系),则( )A .此单摆的固有周期约为2sB .此单摆的摆长约为2mC .若摆长增大,单摆的固有频率增大D .若摆长增大,共振曲线的峰将右移2.一个弹簧振子在水平方向做简谐运动,周期为T ,则( )A .若t 时刻和t t +∆时刻振子位移大小相等、方向相同,则t ∆一定等于T 整数倍B .若t 时刻和t t +∆时刻振子速度大小相等、方向相反,则t ∆一定等于2T 整数倍C .若2T t ∆=,则在t 时刻和t t +∆时刻振子的速度大小一定相等 D .若2T t ∆=,则在t 时刻和t t +∆时刻弹簧的长度一定相等 3.如图所示,两长方体木块A 和B 叠放在光滑水平面上,质量分别为m 和M ,A 与B 之间的最大静摩擦力为0f ,B 与劲度系数为k 的水平轻质弹簧连接构成弹簧振子。
A 和B 在振动过程中始终不发生相对滑动,则( )A .A 受到B 的摩擦力f F 与B 离开平衡位置位移x 总满足f km F x M m =-+ B .它们的最大加速度不能大于0f M C .它们的振幅不可能大于0km f M m+ D .振动过程中,AB 间的摩擦力对A 做正功,对B 做负功4.如图所示,O 是弹簧振子的平衡位置,小球在B 、C 之间做无摩擦的往复运动,则小球任意两次经过O 点可能不同的物理量是( )A.速度B.机械能C.回复力D.加速度5.振动的单摆小球通过平衡位置时,关于小球受到的回复力、合力及加速度的说法中正确的是()A.回复力为零,合力也为零B.回复力不为零,方向沿轨迹的切线C.合力不为零,方向沿轨迹的切线D.合力不为零,加速度不为零,方向指向悬点6.如图所示,轻弹簧上端固定,下端连接一小物块,物块沿竖直方向做简谐运动。
以竖直向上为正方向,物块做简谐运动的表达式为y=0.1sin5πt(m)。
机械实验之振动参数的测定引言振动是机械工程中一个非常重要的概念。
在机械系统中,振动会导致性能下降、损坏甚至故障。
因此,准确测定振动参数对于机械系统的设计和维护至关重要。
本文将介绍机械实验中测定振动参数的方法和步骤,并使用Markdown 文本格式进行说明。
振动参数的定义在进行振动参数测定之前,我们首先要了解振动参数的定义。
常见的振动参数有以下几种:1.振幅:振动的最大偏离量,常用单位为米(m)或毫米(mm)。
2.频率:振动的周期数每秒所发生的次数,常用单位为赫兹(Hz)。
3.相位:描述振动在某一时刻与参考点之间的位置关系,常用角度来表示。
4.加速度:物体在单位时间内的速度变化率,常用单位为米每平方秒(m/s²)。
实验步骤以下是测定振动参数的一般步骤:1.准备实验装置和仪器:选择一个适当的实验装置,例如一个振动台或一个振动传感器。
同时需要准备振动参数测量仪器,例如振动测试仪或加速度计。
2.安装振动传感器:将振动传感器安装在待测物体或系统上。
确保传感器位置稳定且能够准确地测量振动参数。
3.启动振动系统:通过适当的激励方式,启动振动系统。
可以使用电机、震动器或其他适当的装置来激励振动。
4.测量振动参数:使用振动参数测量仪器,对振动进行测量。
可以测量振幅、频率、相位和加速度等参数。
5.记录和分析结果:将测量得到的数据记录下来,并进行分析。
可以使用图表等方法来直观地展示振动参数的变化。
实验注意事项在进行振动参数的测定过程中,需要注意以下几点:1.实验装置和仪器的选择应当与待测物体或系统的特性相匹配。
2.安装振动传感器时,应当确保传感器的位置稳定。
同时还要注意传感器与待测物体或系统之间的连接方式。
3.激励振动系统时,要注意激励幅值的选择,不能过大或过小。
4.测量振动参数时,要遵循正确的测量方法和标准。
确保测量结果的准确性和可靠性。
5.在记录和分析结果时,要注意对数据进行合理的处理,避免错误的解读和分析。
振动频率测试方法一、引言振动频率是描述物体振动状态的重要参数,广泛应用于机械、电子、航空航天等领域。
准确测量振动频率对于确保设备的正常运行和故障诊断具有重要意义。
本文将介绍几种常用的振动频率测试方法,包括机械式测试方法、电子式测试方法和光学式测试方法,并对其优缺点进行分析。
二、机械式测试方法机械式测试方法是一种传统的测量振动频率的方式。
其基本原理是通过将被测物体与一个质量块相连,使其形成一个等效质量系统,并通过改变质量块的位置来改变系统的固有频率。
通过观察系统在不同位置下产生共振现象时的固有频率,即可得到被测物体的振动频率。
机械式测试方法具有简单易行、成本低廉等优点。
然而,由于其需要改变质量块位置来进行测量,因此需要较长时间来得到准确结果,并且在实际应用中存在一定难度。
三、电子式测试方法电子式测试方法利用传感器将被测物体产生的振动转化为电信号,通过电子测量设备进行信号处理,得到振动频率的测量结果。
常用的电子式测试方法包括加速度传感器法、速度传感器法和位移传感器法。
加速度传感器法是最常见的电子式测试方法。
其基本原理是通过将加速度传感器安装在被测物体上,测量物体在不同频率下产生的加速度信号,并通过频谱分析得到振动频率。
加速度传感器法具有响应快、准确性高等优点,广泛应用于工程领域。
速度传感器法和位移传感器法则是通过测量物体产生的速度和位移信号来得到振动频率。
这两种方法相对于加速度传感器法来说具有更高的准确性,但在实际应用中受到安装位置限制。
四、光学式测试方法光学式测试方法利用光学原理进行振动频率测量。
其基本原理是通过将激光束照射在被测物体上,并利用激光干涉仪等设备来检测物体表面反射回来的激光信号,根据干涉现象得到振动频率。
光学式测试方法具有非接触式、高灵敏度等优点,适用于对高精度振动频率的测量。
然而,光学设备的价格较高,使用起来较为复杂,需要专业的操作技术。
五、优缺点比较综合以上介绍的三种振动频率测试方法,它们各自具有不同的优缺点。
一、选择题1.关于简谐运动的质点的以下说法正确的是( )A .间隔半个周期的整数倍的两个时刻,物体的振动情况相同B .做简谐运动的质点在半个周期内物体的动能变化一定为零C .质点在四分之一周期的时间内的路程一定等于一倍振幅D .任一时刻加速度和速度方向都相反2.如图甲所示,弹簧振子以点O 为平衡位置,在A 、B 两点之间做简谐运动。
取向左为正方向,振子的位移x 随时间t 的变化如图乙所示,下列说法正确的是( )A .0.8s t =,振子的速度为零B .0.2s t =时,振子在O 点右侧6cm 处C .0.4s t =和 1.2s t =时,振子的加速度均为零D .0.4s t =到0.8s t =的时间内,振子的速度逐渐增大3.一质点做简谐运动,先后以相同的速度依次通过A 、B 两点,历时1s ,质点通过B 点后再经过1s 又第2次通过B 点,在这两秒钟内,质点通过的总路程为12cm ,则质点的振动周期和振幅分别为( )A .3s ,6cmB .4s ,6cmC .4s ,9cmD .2s ,8cm 4.关于简谐运动,下列说法正确的是( )A .做简谐运动物体所受的回复力方向不变,始终指向平衡位置B .在恒力的作用下,物体可能做简谐运动C .做简谐运动物体速度越来越大时,加速度一定越来越小D .做简谐运动物体的加速度方向始终与速度方向相反5.振动的单摆小球通过平衡位置时,关于小球受到的回复力、合力及加速度的说法中正确的是( )A .回复力为零,合力也为零B .回复力不为零,方向沿轨迹的切线C .合力不为零,方向沿轨迹的切线D .合力不为零,加速度不为零,方向指向悬点6.如图所示,小球在光滑水平面上的B 、C 之间做简谐运动,O 为BC 间的中点,B 、C 间的距离为10cm ,则下列说法正确的是( )A .小球的最大位移是10cmB .只有在B 、C 两点时,小球的振幅是5cm ,在O 点时,小球的振幅是0C .无论小球在哪个位置,它的振幅都是10cmD .从任意时刻起,一个周期内小球经过的路程都是20cm7.一个质点以O 点为平衡位置,在A 、B 间做简谐运动,如图(a )所示,它的振动图象如图(b )所示,设向右为正方向,下列说法正确的是( )A .该质点的振动方程为0.05sin 2.5π(m)x tB .0.2s 末质点的速度方向向右C .0.2~0.3s 质点做加速运动D .0.7s 时质点的位置在O 与B 之间8.在一根张紧的绳上挂着四个单摆,甲丙摆长相等,当甲摆摆动时( )A .乙摆振幅最大B .丙摆振幅最大C .丁摆频率最小D .乙摆周期最小 9.如图所示,竖直面上有一半径较大的圆弧轨道,最低点为M 点,有三个小球A 、B 、C (可视为质点),A 球位于圆心处,B 球位于弦轨道MN 的顶端N 点,C 球位于圆弧轨道上极其靠近M 的地方。
《机械振动》测试题(含答案)一、机械振动 选择题1.如右图甲所示,水平的光滑杆上有一弹簧振子,振子以O 点为平衡位置,在a 、b 两点之间做简谐运动,其振动图象如图乙所示.由振动图象可以得知( )A .振子的振动周期等于t 1B .在t =0时刻,振子的位置在a 点C .在t =t 1时刻,振子的速度为零D .从t 1到t 2,振子正从O 点向b 点运动2.在科学研究中,科学家常将未知现象同已知现象进行比较,找出其共同点,进一步推测未知现象的特性和规律.法国物理学家库仑在研究异种电荷的吸引力问题时,曾将扭秤的振动周期与电荷间距离的关系类比单摆的振动周期与摆球到地心距离的关系.已知单摆摆长为l ,引力常量为G ,地球质量为M ,摆球到地心的距离为r ,则单摆振动周期T 与距离r 的关系式为( ) A .T =2πrGMlB .T =2πrl GM C .T =2πGMr lD .T =2πlr GM3.下列叙述中符合物理学史实的是( ) A .伽利略发现了单摆的周期公式 B .奥斯特发现了电流的磁效应C .库仑通过扭秤实验得出了万有引力定律D .牛顿通过斜面理想实验得出了维持运动不需要力的结论4.如图所示,质量为m 的物块放置在质量为M 的木板上,木板与弹簧相连,它们一起在光滑水平面上做简谐振动,周期为T ,振动过程中m 、M 之间无相对运动,设弹簧的劲度系数为k 、物块和木板之间滑动摩擦因数为μ,A .若t 时刻和()t t +∆时刻物块受到的摩擦力大小相等,方向相反,则t ∆一定等于2T的整数倍B .若2Tt ∆=,则在t 时刻和()t t +∆时刻弹簧的长度一定相同 C .研究木板的运动,弹簧弹力充当了木板做简谐运动的回复力D .当整体离开平衡位置的位移为x 时,物块与木板间的摩擦力大小等于mkx m M+ 5.用图甲所示的装置可以测量物体做匀加速直线运动的加速度,用装有墨水的小漏斗和细线做成单摆,水平纸带中央的虚线在单摆平衡位置的正下方。