第六章线性定常系统的综合
- 格式:doc
- 大小:62.50 KB
- 文档页数:2
第一章控制系统的状态空间表达式1.状态空间表达式n 阶 DuCx y Bu Ax x +=+=&1:⨯r u 1:⨯m y n n A ⨯: r n B ⨯: n m C ⨯:r m D ⨯:A 称为系统矩阵,描述系统内部状态之间的联系;B为输入(或控制)矩阵,表示输入对每个状态变量的作用情况;C 输出矩阵,表示输出与每个状态变量间的组成关系,D直接传递矩阵,表示输入对输出的直接传递关系。
2.状态空间描述的特点①考虑了“输入-状态-输出”这一过程,它揭示了问题的本质,即输入引起了状态的变化,而状态决定了输出。
②状态方程和输出方程都是运动方程。
③状态变量个数等于系统包含的独立贮能元件的个数,n 阶系统有n 个状态变量可以选择。
④状态变量的选择不唯一。
⑤从便于控制系统的构成来说,把状态变量选为可测量或可观察的量更为合适。
⑥建立状态空间描述的步骤:a 选择状态变量;b 列写微分方程并化为状态变量的一阶微分方程组;c 将一阶微分方程组化为向量矩阵形式,即为状态空间描述。
⑦状态空间分析法是时域内的一种矩阵运算方法,特别适合于用计算机计算。
3.模拟结构图(积分器 加法器 比例器)已知状态空间描述,绘制模拟结构图的步骤:积分器的数目应等于状态变量数,将他们画在适当的位置,每个积分器的输出表示相应的某个状态变量,然后根据状态空间表达式画出相应的加法器和比例器,最后用箭头将这些元件连接起来。
4.状态空间表达式的建立① 由系统框图建立状态空间表达式:a 将各个环节(放大、积分、惯性等)变成相应的模拟结构图;b 每个积分器的输出选作i x ,输入则为i x &;c 由模拟图写出状态方程和输出方程。
② 由系统的机理出发建立状态空间表达式:如电路系统。
通常选电容上的电压和电感上的电流作为状态变量。
利用KVL 和KCL 列微分方程,整理。
③由描述系统的输入输出动态方程式(微分方程)或传递函数,建立系统的状态空间表达式,即实现问题。

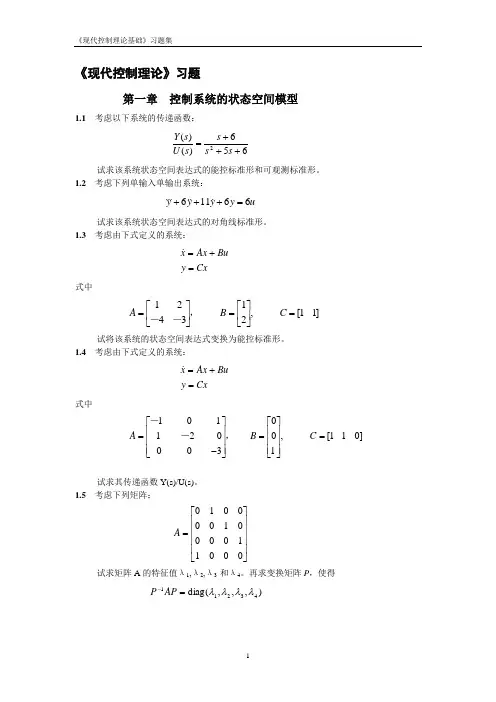
《现代控制理论》习题第一章 控制系统的状态空间模型1.1 考虑以下系统的传递函数:656)()(2+++=s s s s U s Y试求该系统状态空间表达式的能控标准形和可观测标准形。
1.2 考虑下列单输入单输出系统:u y y yy 66116=+++试求该系统状态空间表达式的对角线标准形。
1.3 考虑由下式定义的系统:Cxy Bu Ax x=+=式中]11[,213421=⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=C B A ,--试将该系统的状态空间表达式变换为能控标准形。
1.4 考虑由下式定义的系统:Cxy Bu Ax x=+=式中]011[,10030021101=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=C B A ,--试求其传递函数Y(s)/U(s)。
1.5 考虑下列矩阵:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0001100001000010A试求矩阵A 的特征值λ1,λ2,λ3 和λ4。
再求变换矩阵P ,使得),,,(diag 43211λλλλ=-AP P第二章 状态方程的解2.1 用三种方法计算下列矩阵A 的矩阵指数函数At e 。
1) ⎥⎦⎤⎢⎣⎡--=5160A; 2) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=6116100010A2.2 计算下列矩阵的矩阵指数函数At e 。
1) ⎥⎦⎤⎢⎣⎡=0010A ; 2) ⎥⎦⎤⎢⎣⎡=1002--A ; 3) ⎥⎦⎤⎢⎣⎡-=0110A ; 4) ⎥⎦⎤⎢⎣⎡=1021A5) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=200010011A ; 6) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=210010001A ; 7) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=000100010A2.2 给定线性定常系统Ax x=式中⎥⎦⎤⎢⎣⎡--=2310A且初始条件为⎥⎦⎤⎢⎣⎡-=11)0(x试求该齐次状态方程的解x (t )。
2.4 已知系统方程如下[]xy u x x 11015610-=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=求输入和初值为以下值时的状态响应和输出响应。

第五章 线性定常系统的状态反馈和状态观测器设计闭环系统性能与闭环极点(特征值)密切相关,经典控制理论用输出反馈或引入校正装置的方法来配置极点,以改善系统性能。
而现代控制理论由于采用了状态空间来描述系统,除了利用输出反馈以外,主要利用状态反馈来配置极点。
采用状态反馈不但可以实现闭环系统极点的任意配置,而且还可以实现系统解耦和形成最优控制规律。
然而系统的状态变量在工程实际中并不都是可测量的,于是提出了根据已知的输入和输出来估计系统状态的问题,即状态观测器的设计。
§5-1 状态反馈与闭环系统极点的配置一、状态反馈1、状态反馈的概念状态反馈就是将系统的每一个状态变量乘以相应的反馈系数反馈到输入端与参考输入相加,其和作为受控系统的输入。
设SISO 系统的状态空间表达式为:bu Ax x+= cx y =状态反馈矩阵为k ,则状态反馈系统动态方程为:()()x A x b v k x A b k x b v=+-=-+cx y =式中:k 为n ⨯1矩阵,即[]11-=n o k k k k ,称为状态反馈增益矩阵。
)(bk A -称为闭环系统矩阵。
闭环特征多项式为)(bk A I --λ。
可见,引入状态反馈后,只改变了系统矩阵及其特征值,c b 、阵均无变化。
【例5.1.1】已知系统如下,试画出状态反馈系统结构图。
u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=100200110010 , []x y 004= 解:[]x k k k v kx v u21-=-=其中[]21k k k k=称为状态反馈系数矩阵或状态反馈增益矩阵。
⎪⎪⎩⎪⎪⎨⎧=+-=+-==1333222142x y u x x x x xx x说 明:如果系统为r 维输入、m 维输出的MIMO 系统,则反馈增益矩阵k 是一个m r ⨯维矩阵。
即mr rm r r m m k k k k k k k k k k ⨯⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡= 2122221112112、状态反馈增益矩阵k 的计算控制系统的品质很大程度上取决于该系统的极点在s 平面上的位置。
第六章 线性定常系统的综合
注明:*为选做题
6-1 已知系统状态方程为:
100100230110101100011x x u
y x •-⎛⎫⎛⎫ ⎪ ⎪=--+ ⎪ ⎪ ⎪ ⎪-⎝⎭⎝⎭
⎛⎫= ⎪⎝⎭ 试设计一状态反馈阵使闭环系统极点配置为-1,-2,-3. 5-2 有系统:
()2100111,0x x u y x •
-⎛⎫⎛⎫=+ ⎪ ⎪-⎝⎭⎝⎭=
(1) 画出模拟结构图。
(2) 若动态性能不能满足要求,可否任意配置极点?
(3) 若指定极点为-3,-3,求状态反馈阵。
5-3* 设系统的传递函数为:
(1)(2)(1)(2)(3)
s s s s s -++-+ 试问可否用状态反馈将其传递函数变成:
1(2)(3)
s s s -++ 若能,试求状态反馈阵,并画出系统结构图。
5-4 是判断下列系统通过状态反馈能否镇定。
210402105,00200517050A b -⎛⎫⎛⎫ ⎪ ⎪- ⎪ ⎪ ⎪ ⎪==- ⎪ ⎪- ⎪ ⎪ ⎪ ⎪-⎝⎭⎝⎭
5-5* 设系统状态方程为:
010000010100010001101x x u •⎛⎫⎛⎫ ⎪ ⎪- ⎪ ⎪=+ ⎪ ⎪ ⎪ ⎪-⎝⎭⎝⎭ (1) 判断系统能否稳定。
(2) 系统能否镇定。
若能,试设计状态反馈使之稳定。
5-6* 设计一前馈补偿器,使系统:
1112()11(1)s s W s s s s ⎛⎫ ⎪++ ⎪= ⎪ ⎪+⎝⎭
解耦,且解耦后的极点为-1,-1,-2,-2.
5-7* 已知系统:
100100230110101100011x x u
y x •-⎛⎫⎛⎫ ⎪ ⎪=--+ ⎪ ⎪ ⎪ ⎪-⎝⎭⎝⎭
⎛⎫= ⎪⎝⎭ (1) 判别系统能否用状态反馈实现解耦。
(2) 设计状态反馈使系统解耦,且极点为-1,-2,-3. 5-8 已知系统:
()01000110x x u y x •
⎛⎫⎛⎫=+ ⎪ ⎪⎝⎭⎝⎭=
试设计一状态观测器,使观测器的极点为-r,-2r(r>0).
5-9* 已知系统:
()21001110x x u y x •
-⎛⎫⎛⎫=+ ⎪ ⎪-⎝⎭⎝⎭=
设状态变量2x 不能测取,试设计全维和降维观测器,使观测器极点为-3,-3. 5-10* 已知系统:
()010000100001100x x u y x
•⎛⎫⎛⎫ ⎪ ⎪=+ ⎪ ⎪ ⎪ ⎪⎝
⎭⎝⎭= 设计一降维观测器,使观测器极点为-4,-5.画出模拟结构图。
5-11* 设受控对象传递函数为31s
: (1)
设计状态反馈,使闭环极点配置为13,2--± (2) 设计极点为-5的降维观测器。
(3) 按(2)的结果,求等效的反馈校正和串联校正装置。