基于方向场的指纹图像处理算法
- 格式:doc
- 大小:13.00 KB
- 文档页数:2

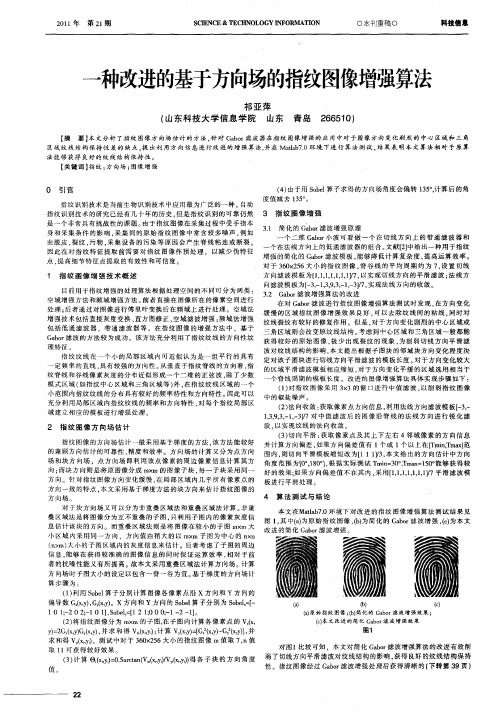
基于方向滤波的指纹图像增强算法的研究张彤;杨秀坤【摘要】Enhanced fingerprint is the key step of the finger identification system, the effect of the enhanced quality plays an important role in the fingerprint identification system. This paper used the method of Sober operator to get the direction figure, and Sober operator was improved. Based on the direction of filter for fingerprint image enhancement, designed a set of filter to realize the enhancement of fingerprint image, and solved the problem of rotating o-verflow successful through the extended filter. The experimental results proved that the method of improving the quality of the fingerprint was quite effective.%指纹增强是指纹识别系统中的关键一步,增强效果的好坏对整个指纹识别系统有着至关重要的作用.采用基于Sobel算子的方法求取方向图,并且对Sobel算子进行了补充和改进.然后基于方向滤波的指纹图像增强方法,设计一组滤波器来实现指纹图像的增强,并且通过滤波器扩展成功解决了旋转溢出问题.实验证明,该方法的对改善指纹质量十分有效.【期刊名称】《哈尔滨商业大学学报(自然科学版)》【年(卷),期】2012(028)005【总页数】6页(P565-569,574)【关键词】指纹增强;方向滤波;方向图【作者】张彤;杨秀坤【作者单位】哈尔滨工程大学信息与通信工程学院,哈尔滨150001;哈尔滨工程大学信息与通信工程学院,哈尔滨150001【正文语种】中文【中图分类】TP391近年来,在指纹采录过程中,由于采集器的本身缺陷,人为因素等,采集到的指纹图像有10%左右是低质量指纹图像,为了保证指纹识别的有效运算,指纹增强已经是必不可少的关键一步[1-2].方向滤波是一种非常常用又有效的方法,它是依据指纹图像特点而设计出来的[3-4].方向滤波的主要特点是使用与指纹局部方向一致的滤波器进行滤波,使指纹纹线方向的点得到增强,随机噪声得到消弱,指纹纹线平滑连续.由于指纹纹线方向是缓慢变化的,所以要涉及多个方向的滤波器,不同的方向选用不同的滤波器.基于方向滤波的指纹图像增强算法包括两个最关键的步骤就是指纹方向图的计算和方向滤波器的设计[5-9].本文利用梯度法求取指纹的方向图,并对梯度法进行了一定的改进,得到了效果更好的指纹方向图.在滤波器的设计上,利用方向滤波器原则设计出水平方向滤波器,再对它进行旋转插值得到其他方向上的方向滤波模板,并提出了旋转溢出问题和解决方法.并且对每一种方法的增强结果作出了分析和评价.1 理论分析与设计1.1 基于方向滤波的指纹图像的增强方向滤波增强算法流程图如图1所示.算法主要步骤和目的是:图1 方向滤波增强算法流程图1)图像的正规化:目的是为了消除传感器本身的噪声以及因为手指压力不同而造成的灰度差异.2)方向图的求取:指纹纹线是指纹的一个重要特征,它的纹理性和方向性具有极其重要的意义.因此,要使低质量的指纹图像预处理后能获取清晰稳定的脊线特征图,提取指纹图像的方向信息——方向图是必不可少的一步.本文应用改进的梯度发求解方向图,并得到了较好的效果.3)指纹图像的方向滤波:根据像素点方向不同设计一组滤波器,以满足不同方向的像素点,设计时必须考虑指纹方向性和谷脊交替的特性.4)指纹图像的二值化:将滤波后的图像转化为二值图像,是指纹识别必不可少的一步.1.2 归一化f(i,j)代表原始图像在点(i,j)的灰度值,f'(i,j)代表规格化后的图像在点(i,j)的灰度值,M代表原图像的均值,VAR代表原图像的方差,由公式(1)和公式(2)确定.M0和是期望得到的均值,VAR0是期望得到的方差.f'(i,j)为规格化后的指纹图像由式(3)确定.其中:M0和VAR0为预置的均值和方差,可以取M0=120,VAR0=120.其处理后的图像如图2所示,图3为未经处理的指纹原图像.可见,正规化并没有改变指纹文线的质量,只是改变了整幅图像的对比度.1.3 运用改进的梯度法求解方向图本文采用的是Sobel梯度算子.把大小为3×3的Isotropic Sobel算子扩展到5×5,如下所示,扩展的二维Isotropic Sobel是垂直边缘检测算子和水平边缘检测算子.其中改进的依据是权值与临近点和中心点的距离成反比的原则.该方法保留细节能力强,同时去噪能力也很强.使用这两个方向上的灰度差异就可以计算出当前点的梯度及其梯度方向,垂直于梯度方向的就是脊线的方向.如图4所示为改进算子所求出的方向图.图4 改进Sobel算子求出的方向图通过方向图短线方向的肉眼直观比较可能难以发现两种方法所求的纹线方向的差异,如图5、6所示.由图5、6比较可知,普通Sobel算子增强后的图像产生了较多的伪特征,通过图7、8的比较以及图9、10的比较可以看出.但改进Sobel算子的增强时间要长于普通Sobel算子,这是较好效果的代价.图5 3×3 Sobel算子增强的图像2 指纹的方向滤波2.1 方向滤波器的设计滤波后的指纹图像中每一个像素的灰度值,都是由原来图像中它的周围点像素值共同决定的.如图11的方向滤波器,每一点的灰度都由其邻近的24个像素的灰度值共同决定,即对于第i行第j列点的灰度值f(i,j)[7]如公式(4)所示,并且通过式(5)对进行进一步的处理:图11 方向滤波器由于使用的指纹图像的脊线宽度在个像素之间,因此滤波器的尺寸设置为为宜,并且对上述模板做出一定的修改,使每一行的系数由中间向两端很快地衰减,得到改进后的滤波模板如图12所示.图12 改进后的方向滤波器Z=-24,Y=0,X=0,U=30,得到水平方向上的方向滤波器如图13所示.图13 水平方向滤波器实例2.2 滤波器的旋转脊线的方向,可在0~180°之间预先划分为N个基本方向,同时当N越大时脊线方向的描述也就越好,但实验证明:若N太大,耗费计算时间多,对脊线方向质量的改善也一般,此处理中最好选取一个恰当的值.通过实验比较,N取8时就满足实际要求,即需要8个不同的滤波器.如上已设计出了水平方向上的滤波器,其他方向的滤波器可由水平方向按式(6)旋转[8-10]得到.旋转后的滤波器坐标为(x',y'),水平方向滤波器的坐标为(x,y).其(x',y')点的权值可通过旋转θ角,返回到水平方向上(x,y)点,并通过f(x,y)的值求取.如图14所示.图14 点方向坐标变换通过旋转处理后,得到的滤波器,其(x',y')的系数与水平方向的滤波器(x,y)位置的系数是相等的,即fθ(x',y')=f(x,y).根据式(6)计算出对应于(x',y')点的值即(x,y)值.当(x,y)不为整数时,分别取其附近的4个整数点,如图15所示.具体计算步骤如下.图15 线性插值算法这样利用式(7),式(9)及,即可求出的值.由以上公式,通过VC++编程可求得其他7个方向的滤波器,但有一点需要特别注意,在这一旋转的过程中出现了旋转溢出问题,通过一定角度旋转后,与新方向的滤波器坐标(x',y')对应的水平滤波器坐标(x,y)将超出原方形区域,本文尝试了多种解决方法,如对无法求出的元素补零操作等,但效果都不理想,最后在做线性插值前前先对原方形区域进行扩展,可扩展成的模板,扩展元素可通过原边缘元素的复制来实现,并成功地解决了溢出问题.3 实验结果分析通过VC++编程,我们可以得到8个方向上的方向滤波器,图16展示了这8个滤波器分别作用的结果.图16 方向滤波器各方向分别作用结果在编程过程中,对角度分区间进行操作共分为8个区间,每个区间的长度都为,分别为(0°~11.25°)∩(168.75°~180°)和(11.25°~33.75°),(33.75°~56.25°),(56.25°~78.75°),(78.75°~101.25),(101.25° ~123.75°),(123.75° ~146.25°),(146.25°~168.75°)依次对应着方向1滤波器~方向8滤波器,最后的滤波增强结果如图17(B)所示.我们从图像中提取出部分来仔细分析,如图18所示,可见本算法对空洞,断裂的修补能力极佳,还大大的改善了图像的对比度,而且增强后的图像并未改变原图像的大部分的重要的特征.图17 方向滤波增强图18 细节对比图5 实验结果对比参考文献:[1]CHRISTOPH F.A 3D-TV Approach Using Depth-Image-Based Rendering(DIBR)[C]//Visualization,Imaging,and Image Processing(VIIP),Benalmadena,Spain.2003,482--487.[2]CHAOCHUNG C,CHENGTE L,POSUN H.A Block-based 2D-to-3D Conversion System with Bilateral Filte[C]//International Conference on Consumer Electronics,Las Vegas,NV,USA.2009:1-4.[3]FENG X,GUIHUA E,XUDONG X,et al.2D-to-3D Conversion Based on Motion and Color Mergence[C]//3DTV Conference:The True Vision-Capture,Transmission and Display of 3D Video,Istanbul,Turkey,2008:205–208.[4]SHAOJIE Z,TERENCES.Defocusmap estimation from a singleimage[J].Pattern Recognition,2011(5):1852–1858.[5]YUE F,JAYASEELAN J,JIANG J.Cue based disparity estmation for possible2D to3D video conversion[C]//Visual Information Engineering.IET International Conference,Bangalore,India.2006:384-388[6]ASHUOTSH S,JAMIE S,ANDREW Y N.Depth estimation usingmonocular and stereo cues[C]//International Joint Conference on Artificial Intelligence(IJCAI),Hyderabad,India.2007:2197-2203.。

基于方向图的指纹自适应预处理算法的研究的开题报告一、选题的背景和意义在当今数字通信技术快速发展的时代,无线通信系统的性能越来越被重视。
无线通信系统的性能受到如信道衰落等多种因素的影响,其中接收机前端的预处理技术对于提升无线通信系统性能具有重要作用。
然而,在户外或者高速移动情况下,信号经常会出现多径效应,会使得信号变得复杂,因此使信号的质量进一步降低。
在移动通信中,这种问题尤为严重。
指纹自适应预处理算法可以有效的提高无线通信系统性能,其中的方向图信息可以使得算法适应不同的通信环境。
该算法在现有的无线通信系统中已经被广泛应用,以提高系统的鲁棒性和性能。
因此,本文将着重研究基于方向图的指纹自适应预处理算法,通过深入研究改进该算法来提升无线通信系统的性能。
二、研究内容和目标本研究的主要内容和目标如下:1.通过系统的学习和研究,掌握现有的指纹自适应预处理技术,特别是基于方向图的指纹自适应预处理算法;2.对当前指纹自适应预处理算法的性能进行评估,并深入分析其短处,为进一步优化该算法做好准备;3.研究并改进基于方向图的指纹自适应预处理算法,提高无线通信系统的鲁棒性和性能;4.在真实场景下,仿真并验证我们所提出的算法,证明其可以有效的提高无线通信系统性能。
三、研究方法1. 对基于方向图的指纹自适应预处理算法进行深入研究和分析,总结算法的优缺点;2. 对现有算法进行仿真,提取原始信号的方向图信息或矢量信息,并在不同方向上对信噪比进行估计;3. 提出改进算法的具体思路,改进算法对于复杂信道环境能够更加稳健;4. 仿真验证改进算法的效果,与现有算法进行对比,评价算法的性能。
四、研究计划和可行性分析该研究将在三个阶段内完成:1.前期准备(2个月): 在学习相关的基础知识后,收集相关论文资料,学习现有基于方向图的指纹自适应预处理算法。
同时,熟悉相关仿真工具和平台。
2.研究和改进(6个月): 在前期准备后,进行指纹自适应预处理算法的研究和分析,改进算法。

基于图像处理技术的指纹识别研究一、前言指纹作为一种常见的生物信息特征,在现代社会中得到了广泛应用。
其中,指纹识别技术是目前最为成熟和普遍的生物识别技术之一。
其应用领域涉及到安全防护、刑侦物证、金融支付、手机解锁等多个方面。
指纹识别技术可以分为硬件技术和软件技术。
在硬件技术中,指纹采集设备主要包括指纹扫描仪和指纹识别仪。
而在软件技术中,指纹图像处理算法则是关键技术之一。
本文将着重介绍基于图像处理技术的指纹识别研究,主要包括指纹图像预处理、图像增强、特征提取和特征匹配等方面。
二、指纹图像预处理指纹图像预处理主要是对采集到的指纹图像进行去噪和增强。
指纹图像中常常包含噪声、伪纹和干扰等因素,这些因素会影响指纹图像的质量,进而影响后续特征提取和匹配的准确性。
因此,指纹图像预处理是指纹识别技术的重要组成部分。
去噪是指在不破坏原始图像细节的前提下,尽可能地减少图像中的噪声。
指纹图像噪声主要包括背景噪声、伪纹噪声和量化噪声等。
目前常用的去噪方法包括中值滤波、高斯滤波和小波变换等。
增强是指对指纹图像的亮度、对比度和细节等进行调整,以便更好地展示指纹纹线和纹谷等特征。
增强方法包括直方图均衡化、对比度拉伸、频域滤波和时域滤波等。
其中,直方图均衡化方法是最为常用的增强方法之一,可以在增强指纹图像细节的同时保持图像的整体亮度平衡。
三、指纹特征提取指纹特征提取是指从预处理后的指纹图像中提取出能够唯一代表指纹的特征,通常可以分为全局特征和局部特征。
全局特征是指针对整个指纹图像的特征,例如指纹面积、长宽比和面积比等;局部特征则是指针对指纹图像中的一部分区域进行提取,例如指纹的纹线和纹谷等。
在局部特征提取中,通常使用的方法是基于细节和基于方向的算法。
基于细节的方法是指从指纹图像中提取出细节特征,例如细节方向和细节密度等;基于方向的方法则是指从指纹图像中提取出方向特征,例如纹线方向和纹谷方向等。
常用的特征提取方法包括方向梯度直方图法、相位编码法、Gabor滤波器法和小波变换法等。
基于方向场的指纹图像处理算法
作者:段沛沛
来源:《电子技术与软件工程》2017年第01期
指纹识别是一种有效身份鉴定技术方法,可是任何指纹采集设备和方法都无法在采集过程中完全解决图像质量的问题,为此需要在识别之初首先对指纹图像进行处理。
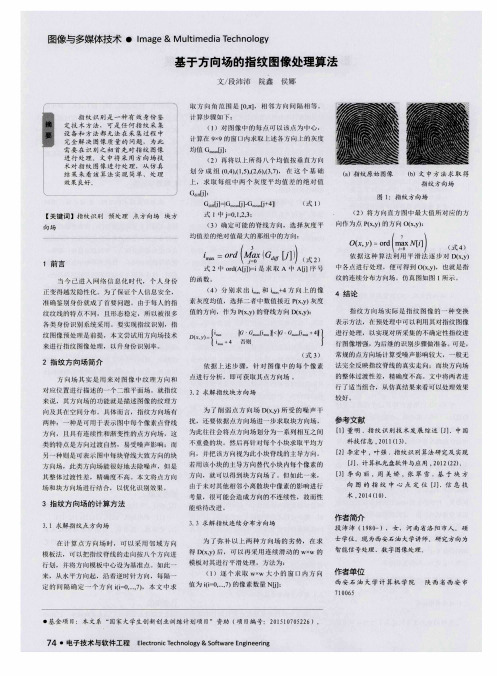
文中将采用方向场技术对指纹图像进行处理,从仿真结果来看该算法实现简单、处理效果良好。
【关键词】指纹识别预处理点方向场块方向场
1 前言
当今已进入网络信息化时代,个人身份正变得越发隐性化。
为了保证个人信息安全,准确鉴别身份就成了首要问题。
由于每人的指纹纹线的特点不同,且形态稳定,所以被很多各类身份识别系统采用。
要实现指纹识别,指纹图像预处理是前提,本文尝试用方向场技术来进行指纹图像处理,以升身份识别率。
2 指纹方向场简介
方向场其实是用来对图像中纹理方向和对应位置进行描述的一个二维平面场。
就指纹来说,其方向场的功能就是描述图像的纹理方向及其在空间分布。
具体而言,指纹方向场有两种:一种是可用于表示图中每个像素点脊线方向,且具有连续性和渐变性的点方向场,这类的特点是方向过渡自然,易受噪声影响;而另一种则是可表示图中每块脊线大致方向的块方向场,此类方向场能很好地去除噪声,但是其整体过渡性差,精确度不高。
本文将点方向场和块方向场进行结合,以优化识别效果。
3 指纹方向场的计算方法
3.1 求解指纹点方向场
在计算点方向场时,可以采用邻域方向模板法,可以把指纹脊线的走向按八个方向进行划,并将方向模板中心设为基准点。
如此一来,从水平方向起,沿着逆时针方向,每隔一定的间隔确定一个方向i(i=0,...,7),本文中求取方向角范围是[0,π],相邻方向间隔相等。
3.2 求解指纹块方向场
为了削弱点方向场D(x,y)所受的噪声干扰,还要依据点方向场进一步求取块方向场,为此往往会将点方向场划分为一系列相互之间不重叠的块。
然后再针对每个小块求取平均方向,并把该方向视为此小块脊线的主导方向。
若用该小块的主导方向替代小块内每个像素的方
向,就可以得到块方向场了。
但如此一来,由于未对其他相邻小离散块中像素的影响进行考量,很可能会造成方向的不连续性,故而性能亟待改进。
3.3 求解指纹连续分布方向场
4 结论
指纹方向场实际是指纹图像的一种变换表示方法,在预处理中可以利用其对指纹图像进行处理,以实现对所采集的不确定性指纹进行图像增强,为后继的识别步骤做准备。
可是,常规的点方向场计算受噪声影响较大,一般无法完全反映指纹脊线的真实走向;而块方向场的整体过渡性差,精确度不高。
文中将两者进行了适当组合,从仿真结果来看可以处理效果较好。
参考文献
[1]董明.指纹识别技术发展综述[J].中国科技信息,2011(13).
[2]李宏中,叶强.指纹识别算法研究及实现[J].计算机光盘软件与应用,2012(22).
[3]李向丽,周美娇,张翠雪.基于块方向图的指纹中心点定位[J].信息技术,2014(10).
作者简介
段沛沛(1980-),女,河南省洛阳市人。
硕士学位。
现为西安石油大学讲师。
研究方向为智能信号处理、数字图像处理。
作者单位
西安石油大学计算机学院陕西省西安市 710065。