案例1机构的动态静力分析
- 格式:ppt
- 大小:2.77 MB
- 文档页数:26
机械原理课程设计说明书设计题目:学院:班级:设计者:学号:指导老师:目录目录....................................................................................一、机构简介与设计数据.......................................................................1.1.机构简介.............................................................................1.2机构的动态静力分析....................................................................1.3凸轮机构构设计........................................................................1.4.设计数据.............................................................................二、压床机构的设计...........................................................................2.1.传动方案设计.........................................................................基于摆杆的传动方案...................................................................六杆机构A ............................................................................六杆机构B ............................................................................2.2.确定传动机构各杆的长度...............................................................三.传动机构运动分析..........................................................................3.1.速度分析.............................................................................3.2.加速度分析...........................................................................3.3. 机构动态静力分析....................................................................3.4.基于soildworks环境下受力模拟分析: ..................................................四、凸轮机构设计.............................................................................五、齿轮设计.................................................................................5.1.全部原始数据.........................................................................5.2.设计方法及原理.......................................................................5.3.设计及计算过程....................................................................... 参考文献.....................................................................................一、机构简介与设计数据1.1.机构简介图示为压床机构简图,其中六杆机构为主体机构。

机械力学中的静力平衡案例分析机械力学是研究物体静力平衡和运动规律的学科,它在实际工程中具有广泛的应用。
通过分析机械力学中的静力平衡案例,我们可以更好地理解各种力的作用规律以及如何实现物体的平衡。
本文将通过几个具体案例,详细分析机械力学中的静力平衡。
案例一:悬挂物体的静力平衡考虑一根均匀的杆,其一端固定,另一端有一个质量为m的物体悬挂着。
我们想要求解杆对物体的悬挂力和杆的支撑力。
根据机械力学的原理,处于静力平衡状态的物体必须满足合力为零的条件。
设物体悬挂的一端与支点的距离为l,选取支点处为坐标原点O,建立坐标系。
根据平衡条件可以列出以下方程:ΣF_x = 0: -T + R = 0ΣF_y = 0: -mg + N = 0其中,T为悬挂力,R为杆的支撑力,N为支点对物体的支持力,mg为物体受力的重力。
通过解以上方程组,可以得到T和R的值。
案例二:平衡力的计算考虑一个物体沿水平面上的一条细杆倾斜放置,我们想要求解物体的平衡力。
根据机械力学的原理,物体在水平面上的平衡需要通过平衡力来实现。
设物体受力的重力为mg,细杆与水平方向的夹角为θ,细杆的长度为l。
根据平衡条件可以列出以下方程:ΣF_x = 0: R - mg*sinθ = 0ΣF_y = 0: N - mg*cosθ = 0其中,R为物体在细杆上的平衡力,N为细杆对物体的支撑力,mg*sinθ为物体受力的水平分力,mg*cosθ为物体受力的垂直分力。
通过解以上方程组,可以得到R和N的值。
案例三:悬臂梁的静力平衡考虑一个悬臂梁,其一端固定在墙上,另一端有一个质量为m的物体。
我们想要求解支撑力和物体的对地反力。
根据机械力学的原理,处于静力平衡状态的悬臂梁满足力矩平衡条件。
设悬臂梁的长度为l,物体与支点的距离为d,选取支点处为坐标原点O,建立坐标系。
根据力矩平衡条件可以列出以下方程:ΣM_O = 0: -mg*d + R*l = 0ΣF_y = 0: N - mg = 0其中,R为支撑力,N为支点对物体的支持力,mg为物体受力的重力。

机构静力分析基础辅导
丁仁亮
机构静力分析的要点有以下几点:
1.掌握力和力矩的基本概念并深刻理解四个基本定理;
2.掌握约束的类型和约束力,柔性约束、光滑面约束、铰链约束(固定铰链约束、活动铰链约束和中间铰链)以及固定端约束,要熟练掌握约束力的分析方法,会画出约束力的方向;
3.熟练掌握平面力系平衡方程及其应用。
在本章中,画受力图(各种约束条件下,约束力的分析),列平衡方程求出未知力是要求重点掌握的。
例1:如图所示吊杆中A、B、C均为铰链连接,已知主动力F,AB=BC=L,BO=h。
求两吊杆的受力的大小。
图示吊杆都是用铰链联接,A、C是固定铰链,B是中间铰链,构件AB和BC都是二力杆,因此可以判断AB杆的受力一定是沿AB连线方向的,BC杆的受力一定是沿BC连线方向,求拉杆的受力时,要取B点为分离体进行受力分析。
B点受力是汇交力系,可以列两个平衡方程:
∑X =0 F BC cos α-F AB cos α=0 F BC =F AB
∑Y =0 2 F AB sin α-F =0 αsin 2F F AB = 注意:在进行受力分析时,一定要注意所求的问题,根据所求的问题取分离体,再分析分离体的受力。
例2:求图示梁支座的约束反力。
已知:F =2kN 。
取梁为分离体,两端都是铰链联接,A 端是固定铰链支座,B 端是活动支座,
梁的受力图如下:
用三个平衡方程求出未知力F A X 、F A Y 、F B ,请同学自行完成。
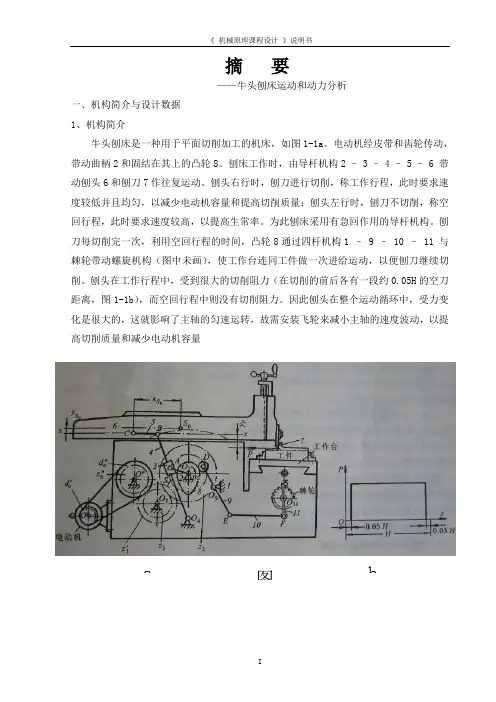
摘要——牛头刨床运动和动力分析一、机构简介与设计数据1、机构简介牛头刨床是一种用于平面切削加工的机床,如图1-1a。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2 –3 –4 –5 –6 带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生常率。
为此刨床采用有急回作用的导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1 – 9 – 10 – 11 与棘轮带动螺旋机构(图中未画),使工作台连同工件做一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力(在切削的前后各有一段约0.05H的空刀距离,图1-1b),而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减少电动机容量a b图目录摘要 (III)1设计任务 (1)2 导杆机构的运动分析 (2)导杆机构的动态静力分析 (4)3.1运动副反作用力分析 (4)3.2力矩分析 (6)4方案比较 (7)5总结 (10)6参考文献 (10)《机械原理课程设计》说明书1设计任务机械原理课程设计的任务是对机器的主题机构进行运动分析。
动态静力分析,确定曲柄平衡力矩,并对不同法案进行比较,以确定最优方案。
要求根据设计任务,绘制必要的图纸和编写说明书等。
2 导杆机构的运动分析2.1 速度分析取曲柄位置1’对其进行速度分析,因为2和3在以转动副相连,所以V A2=V A3,其大小等于ω2l02A,指向于ω2相同。
取构件3和4的重合点A进行速度分析。
列速度矢量方程,得υA4 = υA3 + υA4A3大小 ? √ ?方向⊥O4A ⊥O2A ∥O4B选比例尺μv=0.004(m/s)/mm,做出速度矢量图(见图a)νA4=0.088m/sνA3=0.816m/s取5构件作为研究对象,列速度矢量方程,得υC5 = υB5 + υC5B5大小 ? √ ?方向∥XX ⊥O4B ⊥BC取速度极点p,选比例尺μv=0.004(m/s)/mm,做出速度矢量图(见图a)νC5=0.16m/sνC5B5=0.044m/s2.2 加速度分析取曲柄位置“1”进行加速度分析。
青岛理工大学琴岛学院课程设计说明书课题名称:机械原理课程设计学院:机电工程系专业班级:机械113学号:20110201083学生:张三指导老师:李燕青岛理工大学教务处2013 年 12月 27日《机械原理课程设计》评阅书摘要选取方案三,利用图解法对1点和6电状态时牛头刨床导杆机构进行运动分析、动态静力分析,并汇总本方案所得各位置点的速度、加速度、机构受力数据绘制曲线图。
进行方案比较,确定最佳方案。
将一个班级分为 3 组,每组11人左右,一组选择一个备选方案进行如下分析工作:课程设计内容:牛头刨床导杆机构的运动分析、动态静力分析;(1)绘制机构运动简图(两个位置);(2)速度分析、加速度分析;(3)机构受力分析(求平衡力矩);(4)绘制运动线图。
(上述三项作在一张A1号图纸上)精选文档目录摘要 (I)1设计任务 (1)2导杆机构的基本尺寸确定 (2)3 导杆机构的运动分析 (4)3.1 速度分析 (4)3.2 加速度分析 (5)4导杆机构的动态静力分析 (8)4.1 运动副反作用力分析 (8)4.2 曲柄平衡力矩分析 (10)总结 (11)致谢 (12)参考文献 (13)1设计任务一、课程设计的性质、目的和任务机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学分析与设计的训练,是本课程的一个重要教学环节。
其意义和目的在于:以机械系统运动方案设计为结合点,把机械原理课程设计的各章理论和方法融会贯通起来,进一步巩固和加深学生所学的理论知识;培养学生独立解决有关本课程实际问题的能力,使学生对于机械运动学和动力学的分析和设计有一个较完整的概念,具备计算、制图和使用技术资料的能力。
二、课程设计教学的内容和要求将一个班级进行分组,每组10人左右,一组选择一个备选方案进行如下分析工作:课程设计内容:牛头刨床导杆机构的运动分析、动态静力分析;(1)绘制机构运动简图;(2)速度分析、加速度分析;(1张1号图纸)(3)机构动态静力分析;(4)绘制运动线图。
摘要——牛头刨床运动和动力分析一、机构简介与设计数据1、机构简介牛头刨床是一种用于平面切削加工的机床,如图1-1a。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2 –3 –4 –5 –6 带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生常率。
为此刨床采用有急回作用的导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1 – 9 – 10 – 11 与棘轮带动螺旋机构(图中未画),使工作台连同工件做一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力(在切削的前后各有一段约0.05H的空刀距离,图1-1b),而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减少电动机容量a b图目录摘要 (III)1设计任务 (1)2 导杆机构的运动分析 (2)导杆机构的动态静力分析 (4)3.1运动副反作用力分析 (4)3.2力矩分析 (6)4方案比较 (7)5总结 (10)6参考文献 (10)《机械原理课程设计》说明书1设计任务机械原理课程设计的任务是对机器的主题机构进行运动分析。
动态静力分析,确定曲柄平衡力矩,并对不同法案进行比较,以确定最优方案。
要求根据设计任务,绘制必要的图纸和编写说明书等。
2 导杆机构的运动分析2.1 速度分析取曲柄位置1’对其进行速度分析,因为2和3在以转动副相连,所以V A2=V A3,其大小等于ω2l02A,指向于ω2相同。
取构件3和4的重合点A进行速度分析。
列速度矢量方程,得υA4 = υA3 + υA4A3大小 ? √ ?方向⊥O4A ⊥O2A ∥O4B选比例尺μv=0.004(m/s)/mm,做出速度矢量图(见图a)νA4=0.088m/sνA3=0.816m/s取5构件作为研究对象,列速度矢量方程,得υC5 = υB5 + υC5B5大小 ? √ ?方向∥XX ⊥O4B ⊥BC取速度极点p,选比例尺μv=0.004(m/s)/mm,做出速度矢量图(见图a)νC5=0.16m/sνC5B5=0.044m/s2.2 加速度分析取曲柄位置“1”进行加速度分析。
青岛理工大学琴岛学院课程设计说明书课题名称:机械原理课程设计学院:机电工程系专业班级:机械设计制造及其自动化11-21班学号:学生:指导老师:2011年12月16日《机械原理课程设计》评阅书题目牛头刨床导杆机构的运动分析、动态静力分析学生姓名学号20110271023 指导教师评语及成绩指导教师签名:年月日答辩评语及成绩答辩教师签名:年月日教研室意见总成绩:室主任签名:年月日摘 要选取方案一,利用图解法对6点状态时牛头刨床导杆机构进行运动分析、动态静力分析,并汇总本方案所得各位置点的速度、加速度、机构受力数据绘制θθθθ----b M a v s ,,,曲线图。
进行方案比较,确定最佳方案。
将一个班级分为 3 组,每组12人左右,一组选择一个备选方案进行如下分析工作: 课程设计内容:牛头刨床导杆机构的运动分析、动态静力分析; (1)绘制机构运动简图(两个位置); (2)速度分析、加速度分析;(3)机构受力分析(求平衡力矩b M ); (4)绘制运动线图t M t a t v t s b ----,,,。
(上述四项作在一张0号图纸上目录青岛理工大学琴岛学院 (1)课程设计说明书 (1)摘要 (3)1设计任务 (5)2 导杆机构的运动分析 (6)3导杆机构的动态静力分析 (9)5总结 (12)6参考文献 (13)1设计任务一、课程设计的性质、目的和任务1.课程设计的目的:机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学分析与设计的训练,是本课程的一个重要教学环节。
其意义和目的在于:以机械系统运动方案设计为结合点,把机械原理课程设计的各章理论和方法融会贯通起来,进一步巩固和加深学生所学的理论知识;培养学生独立解决有关本课程实际问题的能力,使学生对于机械运动学和动力学的分析和设计有一个较完整的概念,具备计算、制图和使用技术资料的能力。
2.课程设计的任务:机械原理课程设计的任务是对机器的主题机构进行运动分析。