时域分析法与根轨迹练习题
- 格式:doc
- 大小:1.73 MB
- 文档页数:14
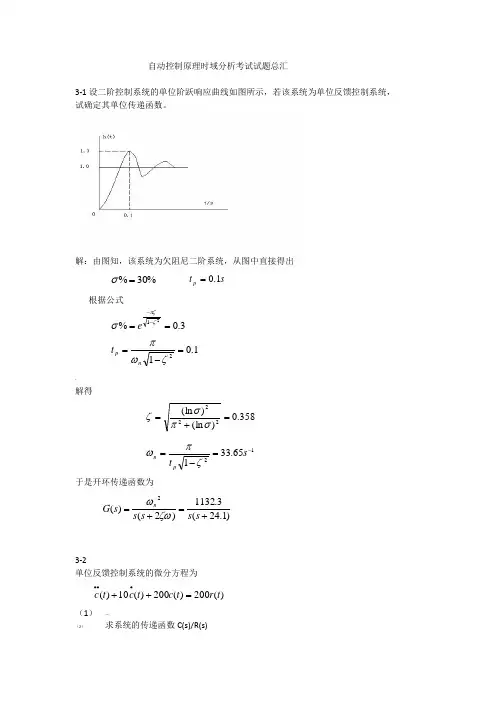
自动控制原理时域分析考试试题总汇3-1设二阶控制系统的单位阶跃响应曲线如图所示,若该系统为单位反馈控制系统, 试确定其单位传递函数。
解:由图知,该系统为欠阻尼二阶系统,从图中直接得出%30%=σ s t p 1.0=根据公式3.0%21==--ζπζσe1.012=-=ζωπn p t,解得358.0)(ln )(ln 222=+=σπσζ1265.331-=-=s t p n ζπω于是开环传递函数为)1.24(3.1132)2()(2+=+=s s s s s G n ζωω 3-2单位反馈控制系统的微分方程为)(200)(200)(10)(t r t c t c t c =++•••(1) — (2) 求系统的传递函数C(s)/R(s)(3) 求系统的阻尼比和自然振荡频率 (4) 求系统的开环传递函数 (5) 若r(t)=1+2t,求稳态误差(6) 若r(t)=2sin(10t+5),求稳态输出3-4设电子心率起搏器系统如图所示,其中模仿心脏的传递函数相当于一纯积分器。
要求: (1) 若5.0=ζ对于最佳响应,问起搏器的增益K 应为多大(2) 若期望心速为60次/min ,并突然接通起搏器,问1s 后实际心速为多少瞬时最大心速为多大解:(1)系统的开环传递函数为:)105.0()(+=s s Ks G:所以闭环传递函数 Ks s KK s s K s 202020)105.0()(2++=++=φ5.0,202,202===ζζωωn n K解之得:K=20 20=n ω (2) 闭环传递函数写为40020400)(2++=s s s φ 闭环极点 j s 310102,1±-= 所以系统单位脉冲响应为)310sin 310(cos )(10t j t et h t+=- 所以阶跃响应 ⎰=τ)(60)(dt t h t c =)1(6010τ-+ec(1)=次/min 峰值时间181.025.0120141.312=-⨯=-=ζωπn p t s{%5.16%75.05.012===⨯---πζπζσee最大心率为m in /9.69%)5.161(60次=+⨯3-5已知控制系统结构如图所示,(1) 当b=0时,试确定单位阶跃输入时系统的阻尼系数、自然频率、最大超调量以及单位斜坡输入所引起的稳态误差。
根轨迹绘制习题及答案根轨迹绘制习题及答案根轨迹是控制系统理论中的重要概念,它可以帮助我们分析和评估系统的稳定性和动态响应。
在学习根轨迹绘制的过程中,练习习题是必不可少的。
本文将为大家提供一些根轨迹绘制的习题及答案,希望对大家的学习有所帮助。
1. 习题一:考虑一个开环传递函数为G(s) = K/(s^2 + 2s + 1)的系统,请绘制其根轨迹,并分析系统的稳定性。
解答一:首先,我们需要确定系统的极点和零点。
对于给定的传递函数G(s),我们可以将其分解为G(s) = K/(s+1)^2的形式,其中极点为-1,零点为无穷远处。
接下来,我们可以根据根轨迹的特性来绘制图形。
根轨迹是极点随着增加K的值而移动的轨迹。
当K趋近于无穷大时,根轨迹会趋近于极点的位置。
根据根轨迹的性质,我们可以得出以下结论:- 当K为正实数时,根轨迹从零点开始,逐渐向极点移动。
- 当K为负实数时,根轨迹从极点开始,逐渐向零点移动。
- 当K为纯虚数时,根轨迹会绕过零点和极点,形成一个闭合的曲线。
因此,在本例中,当K为正实数时,根轨迹从零点开始,逐渐向极点-1移动。
系统的稳定性取决于根轨迹是否穿过虚轴。
根据根轨迹的绘制,我们可以发现根轨迹没有穿过虚轴,因此系统是稳定的。
2. 习题二:考虑一个开环传递函数为G(s) = K/(s^2 + 3s + 2)的系统,请绘制其根轨迹,并分析系统的稳定性。
解答二:首先,我们需要确定系统的极点和零点。
对于给定的传递函数G(s),我们可以将其分解为G(s) = K/(s+1)(s+2)的形式,其中极点为-1和-2,零点为无穷远处。
接下来,我们可以根据根轨迹的特性来绘制图形。
根轨迹是极点随着增加K的值而移动的轨迹。
当K趋近于无穷大时,根轨迹会趋近于极点的位置。
根据根轨迹的性质,我们可以得出以下结论:- 当K为正实数时,根轨迹从零点开始,逐渐向极点移动。
- 当K为负实数时,根轨迹从极点开始,逐渐向零点移动。
第三章 线性系统的时域分析与校正习题及答案3-1 已知系统脉冲响应t e t k 25.10125.0)(-=试求系统闭环传递函数)(s Φ。
解 Φ()()./(.)s L k t s ==+00125125 3-2 设某高阶系统可用下列一阶微分方程T c t c t r t r t ∙∙+=+()()()()τ近似描述,其中,1)(0<-<τT 。
试证系统的动态性能指标为 T T T t d ⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛-+=τln 693.0t T r =22. T T T t s ⎥⎦⎤⎢⎣⎡-+=)ln(3τ 解 设单位阶跃输入ss R 1)(=当初始条件为0时有:11)()(++=Ts s s R s C τ 11111)(+--=⋅++=∴Ts T s s Ts s s C ττC t h t T Te t T()()/==---1τ 1) 当 t t d = 时h t T Te t td ()./==---051τ12=--T T e t T d τ/ ; T t T T d -⎪⎭⎫ ⎝⎛-=-τln 2ln ⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-+=∴T T T t d τln 2ln2) 求t r (即)(t c 从1.0到9.0所需时间)当 Tt e TT t h /219.0)(---==τ; t T T T 201=--[ln()ln .]τ 当 Tt e TT t h /111.0)(---==τ; t T T T 109=--[ln()ln .]τ 则 t t t T T r =-==21090122ln ... 3) 求 t sTt s s e TT t h /195.0)(---==τ ]ln 3[]20ln [ln ]05.0ln [ln TT T T T T T T T t s τττ-+=+-=--=∴3-3 一阶系统结构图如图3-45所示。
要求系统闭环增益2=ΦK ,调节时间4.0≤s t s ,试确定参数21,K K 的值。
1. 自动控制系统对输入信号的响应,一般都包含两个分量,即一个是____________,另一个是__________分量。
2. 函数f(t)=te63-的拉氏变换式是________________________________。
3. 积分环节的传递函数表达式为G (s )=_________________________。
4.在斜坡函数的输入作用下,___________型系统的稳态误差为零。
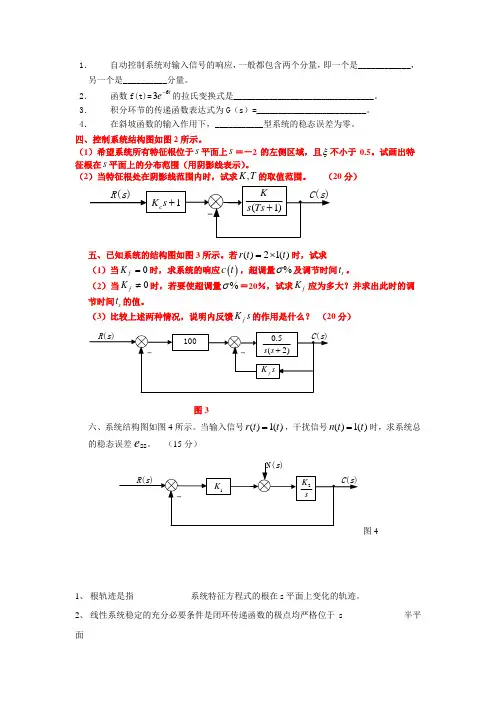
四、控制系统结构图如图2所示。
(1)希望系统所有特征根位于s 平面上s =-2的左侧区域,且ξ不小于0.5。
试画出特征根在s 平面上的分布范围(用阴影线表示)。
(2)当特征根处在阴影线范围内时,试求,K T 的取值范围。
(20分)五、已知系统的结构图如图3所示。
若()21()r t t =⨯时,试求(1)当0f K =时,求系统的响应()c t ,超调量%σ及调节时间s t 。
(2)当0f K ≠时,若要使超调量%σ=20%,试求f K 应为多大?并求出此时的调节时间s t 的值。
(3)比较上述两种情况,说明内反馈f K s 的作用是什么? (20分)图3六、系统结构图如图4所示。
当输入信号()1()r t t =,干扰信号()1()n t t =时,求系统总的稳态误差e ss 。
(15分)图41、 根轨迹是指_____________系统特征方程式的根在s 平面上变化的轨迹。
2、 线性系统稳定的充分必要条件是闭环传递函数的极点均严格位于s______________半平面3、在二阶系统中引入比例-微分控制会使系统的阻尼系数________________。
9、已知单位反馈系统的开环传递函数50 ()(0.11)(5)G ss s s=++,则在斜坡信号作用下的稳态误差为_________。
3、某控制系统的方框图如图所示,试求(16分)(1)该系统的开环传递函数)(sGk、闭环传递函数)()(sRsC和误差传递函数)()(sRsE。
《自动控制原理》课程练习题第一章自动控制的基本概念一、概念:1、自动控制原理中,对线性控制系统进行分析的方法有哪些?时域分析法、根轨迹法、频率特性法。
2、举例说明什么是闭环系统?它具有什么特点?如直流电动机转速闭环控制系统。
特点是:通过反馈回路使系统构成闭环,并按偏差的性质产生控制作用,以求减小或消除偏差的控制系统。
3、举例说明什么是开环系统?它具有什么特点?只有前项通道,无反馈通道,输出信号对输入信号无影响。
不存在系统稳定性问题。
(例子任意)。
4、闭环控制系统的基本环节有?给定、比较、控制、对象、反馈;5、自控系统各环节的输出量分别为?给定量、反馈量、偏差、控制量输出量;6、闭环控制系统由哪几个基本单元组成?由4个基本单元组成:控制器(调节器)、执行器(调节阀)、变送器(测量单元)和被控对象(过程、装置);7、画出自动控制系统基本组成方框结构图?第二章 自动控制系统的数学模型一、概念:1、常见的建立数学模型的方法有哪几种?各有什么特点?分析法(机理建模法)、实验法(系统辨识)和综合法。
机理分析法:机理明确,应用面广,但需要对象特性清晰实验测试法:不需要对象特性清晰,只要有输入输出数据即可,但适用面受限综合法:以上两种方法的结合通常是机理分析确定结构,实验测试法确定参数,发挥了各自的优点,克服了相应的缺点 2、传递函数的定义?传递函数指线性定常系统在零初始条件下输出量的拉氏变换与输入量拉氏变换之比; 3、利用分析法建立系统微分方程的步骤? (1)确定系统输入、输出变量;(2)分析元件工作仲所遵循的物理或化学规律,得到相应的微分方程; (3)消去中间变量,得到输入输出间关系的微分方程; 4、给出梅逊公式,及其中各参数意义?梅逊增益公式为:∑=∆∆=nk k k p P 11其中,k p :从输入到输出的第k 条前向通路总增益; n :从输入到输出的总路数;k ∆:流图余因子式,流图特征式中除去与第k 条前向通道相接触的回路增益项(包括回路增益的乘积项)以后的余式; ∑∑-+-=∆ cbaLL L 1:∑a L 单独回路增益之和;∑c b L L 所有互不接触的回路中,每次取其中两个回路的回路增益之和;二、计算题1、求下面各电路传递函数:2、化简以下传递函数:)1/()(2++=RCs LCs RCs sG )]11(1/[2)(+-=Cs R R R s G3、RC 无源网络电路图如下图所示,试列写该系统的微分方程,并求传递函数Uc(s)/Ui(s)。
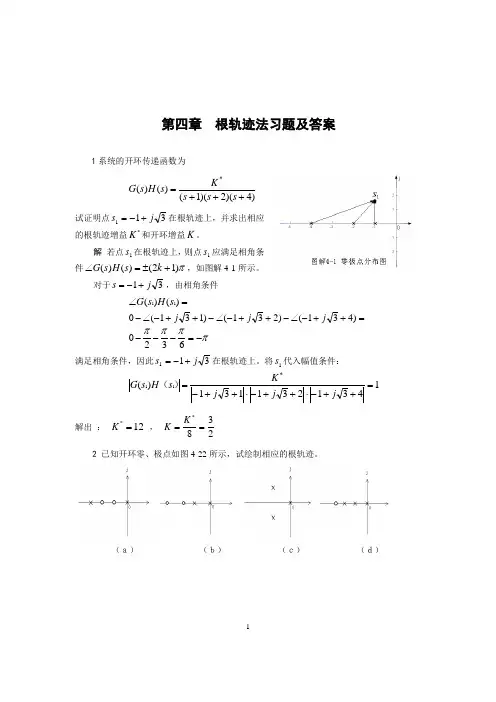
1第四章 根轨迹法习题及答案1系统的开环传递函数为)4)(2)(1()()(*+++=s s s K s H s G试证明点311j s +-=在根轨迹上,并求出相应的根轨迹增益*K 和开环增益K 。
解 若点1s 在根轨迹上,则点1s 应满足相角条件π)12()()(+±=∠k s H s G ,如图解4-1所示。
对于31j s +-=,由相角条件=∠)()(11s H s G=++-∠-++-∠-++-∠-)431()231()131(0j j jππππ-=---6320满足相角条件,因此311j s +-=在根轨迹上。
将1s 代入幅值条件:1431231131)(*11=++-⋅++-⋅++-=j j j K s H s G )(解出 : 12*=K , 238*==K K 2 已知开环零、极点如图4-22所示,试绘制相应的根轨迹。
2解根轨如图解4-2所示:3已知单位反馈系统的开环传递函数,要求:(1)确定)20)(10()()(2+++=*ssszsKsG产生纯虚根为1j±的z值和*K值;(2)概略绘出)23)(23)(5.3)(1()(jsjssssKsG-+++++=*的闭环根轨迹图(要求3确定根轨迹的渐近线、分离点、与虚轴交点和起始角)。
解(1)闭环特征方程020030)()20)(10()(2342=++++=++++=***z K s K s s s z s K s s s s D有 0)30()200()(324=-++-=**ωωωωωK j z K j D令实虚部分别等于零即: ⎪⎩⎪⎨⎧=-=+-**0300200324ωωωωK z K 把1=ω代入得: 30=*K , 30199=z 。
(2)系统有五个开环极点:23,23,5.3,1,054321j p j p p p p --=+-=-=-==① 实轴上的根轨迹:[],5.3,-∞- []0,1-② 渐近线: 1 3.5(32)(32) 2.15(21)3,,555a a j j k σπππϕπ--+-++--⎧==-⎪⎪⎨+⎪==±±⎪⎩③ 分离点:02312315.31111=+++-++++++j d j d d d d 解得: 45.01-=d , 4.22-d (舍去) , 90.125.343j d ±-=、 (舍去)④ 与虚轴交点:闭环特征方程为0)23)(23)(5.3)(1()(=+-+++++=*K j s j s s s s s D把ωj s =代入上方程,整理,令实虚部分别为零得:⎪⎩⎪⎨⎧=+-==-+=*05.455.43 )Im(05.795.10)Re(3524ωωωωωωωj K j解得:⎩⎨⎧==*00K ω ,⎩⎨⎧=±=*90.7102.1K ω,⎩⎨⎧-=±=*3.1554652.6K ω(舍去)⑤ 起始角:根据法则七(相角条件),根轨迹的起始角为74..923..1461359096..751804=----=p θ由对称性得,另一起始角为74.92,根轨迹如图解4-6所示。
第一章自动控制概论一、单项选择题1、采用负反馈形式连接后()。
(分数:2分)A. 一定能使闭环系统稳定B。
系统动态性能一定会提高C。
一定能使干扰引起的误差逐渐减小,最后完全消除D。
需要调整系统的结构参数,才能改善系统性能正确答案:D2、按系统结构来分,控制系统可分为:开环控制,闭环控制和()。
(分数:2分) A。
温度控制B。
压力控制C。
流量控制D。
复合控制正确答案:D3、恒值控制系统的参考量为()。
(分数:2分)A。
常数B. 无规律变化C. 按程序设定变化D. 0 A第二章控制系统的数学模型一、单项选择题1、方框图化简时,串联连接方框总的输出量为各方框输出量的( )。
(分数:2分)A. 代数和B. 乘积C。
平均值D. 加权平均值正确答案:B2、单位阶跃信号1(t)的拉氏变换为()。
(分数:2分)A。
1B. 1/sC. sD. 1/(Ts+1)正确答案:B3、如果单回路单位负反馈系统的开环传递函数为G(s),则其闭环传递函数为:( )。
(分数:2分)A。
G(s)/[1+G(s)]B. G(s)/[1+G(s)H(s)]C。
1/[1+G(s)]D。
1/[1+G(s)H(s)]正确答案:A4、方框图化简时,并联连接方框总的输出量为各方框输出量的()。
(分数:2分)A. 代数和B. 乘积C. 平均值D. 加权平均值正确答案:A5、令线性定常系统闭环传递函数的分母多项式为零,则可得到系统的( ). (分数:2分)A. 代数方程B. 差分方程C。
特征方程D. 状态方程正确答案:C6、线性定常系统的传递函数是在零初始条件下( )。
(分数:2分)A。
系统输出信号与输入信号之比B。
系统输入信号与输出信号之比C。
系统输出信号的Z变换与输入信号的Z变换之比D。
系统输出信号的拉氏变换与输入信号的拉氏变换之比正确答案:D7、线性定常系统的传递函数由()决定。
(分数:2分)A。
输入信号的形式B。
初始条件C。
第四章 根轨迹法习题及答案4-1 系统的开环传递函数为)4s )(2s )(1s (K )s (H )s (G *+++=试证明3j 1s 1+-=在根轨迹上,并求出相应的根轨迹增益*K 和开环增益K 。
解 若点1s 在根轨迹上,则点1s 应满足相角条件π)12()()(+±=∠k s H s G ,如图所示。
对于31j s +-=,由相角条件=∠)s (H )s (G 11-++-∠-)13j 1(0=++-∠-++-∠)43j 1()23j 1(ππππ-=---632满足相角条件,因此311j s +-=在根轨迹上。
将1s 代入幅值条件:143j 123j 113j 1K s H )s (G *11=++-⋅++-⋅++-=)(解出 : 12K *= , 238K K *==4-2 已知单位反馈系统的开环传递函数如下,试求参数b 从零变化到无穷大时的根轨迹方程,并写出2b =时系统的闭环传递函数。
(1))b s )(4s (02)s (G ++=(2))b s )(2s (s )b 2s (01)s (G +++=解 (1) )4j 2s )(4j 2s ()4s (b 20s 4s )4s (b )s (G 2-++++=+++=' 28s 6s 20)s (G 1)s (G )s (2++=+=Φ(2) )10s 2s (s )20s 2s (b )s (G 22++++='=)3j 1s )(3j 1s (s )19j 1s )(19j 1s (b -+++-+++ 40s 14s 4s )4s (10)s (G 1)s (G )s (23++++=+=Φ 4-3 已知单位反馈系统的开环传递函数)b s )(4s (s2)s (G ++=,试绘制参数b 从零变化到无穷大时的根轨迹,并写出s=-2这一点对应的闭环传递函数。
解 )6s (s )4s (b )s (G ++='根轨迹如图。
线性系统的根轨迹分析法【课后自测】4-1 已知系统开环传递函数的零极点分布如图所示,试绘制系统概略根轨迹图图4-17 题4-1图解:4-2 系统的开环传递函数为*()(1)(2)(4)k K G s s s s =+++(1)试用相角条件证明该系统的根轨迹通过点(1,- (2)求在闭环极点(1,--时系统的根轨迹增益*K解:(1)若点s 1在根轨迹上,则点s 1应满足相角条件∠G (s )H (s )=±(2k+1)π,如图所示,对于s 1=-1+j √3 ,由相角条件∠"G (s 1)H (s 1)=0-∠(-1+j √3+1)-∠(-1+j √3 +2)-∠(-1+j √3+4)=0−π2−π3−π6=−π"满足相角条件,因此s 1=-1+j √3=-1在根轨迹上。
将s 1代入幅值条件:|G (s 1)H(s 1)|=∗|−1+j √3+1||−1+j √3+2||−1+j √3+4|=1解出K *=124-3 已知单位负反馈控制系统的开环传递函数如下,试绘制系统的根轨迹(1)*()(1)(3)(5)k K G s s s s =+++(2)*(8)()(5)(10)k K s G s s s s +=++解:(1)① n =3,m =0,总共3条根轨迹,其中极点分别为P 1=-1,P 2=-3,P 3=-5 ② 确定实轴上轨迹(-∞,-5],[-3,-1] ③ 渐近线φa =(2k +1)πn −m =(2k +1)π3={−π3,k =−1π3,k =0π,k =1σa =∑(−P j )−n j=1∑(−Z i )mi=1n −m =−93=−3④ 确定根轨迹分离点D (s )=(s +1)(s +3)(s +5)+k 0=0,令dk0ds =0, d =−1.85⑤确定根轨迹与虚轴交点,令s =jω代入特征方程,{23ω−ω2=0k 0−9ω2+15=0⇒{ω=±4.8k 0=192画出根轨迹图如下(2)①n=3,m=1,总共3条根轨迹,一条趋于零点,两条趋于无穷远,其中零极点分别为P1= 0,P2=-5,P3=-10,Z1=-8②确定实轴上轨迹[-10,-8],[-5,0]③渐近线φa=(2k+1)πn−m=(2k+1)π2={π2,k=0−π2,k=−1σa=∑(−P j)−nj=1∑(−Z i)mi=1n−m=−3.5④确定根轨迹分离点1 d+8=1d+1d+5+1d+10得出d=-2.66画出根轨迹图如下4-4已知单位负反馈控制系统的开环传递函数如下,试绘制系统的根轨迹(1)*222(24)()(22)(825)k K s s G s s s s s ++=++++ (2)*(8)()(2)(5)k K s G s s s s +=++解(1)①n =4,m =2,总共4条根轨迹,两条趋于零点,两条趋于无穷远,其中零极点分别为P 1=-1+j,P 2=-1-j,P 3=-4+j3,P 4=-4-j3,Z 1=-1+j √3,Z 1=-1-j √3 ②实轴上无轨迹 ③ 渐近线φa =(2k +1)πn −m =(2k +1)π4={−π2,k =−1π2,k =03π2,k =1 σa =∑(−P j )−n j=1∑(−Z i )mi=1n −m=−4④出射角和入射角φP3=π-θP1P3-θP2P3-θP4P3+θZ1P3+θZ1P4=π-(180°-arctan 43)-(180°-arctan 23)-90°+(180°-arctan 3-√33)+(180°-arctan3+√33)=223°φP4=−223°φP1=π−θP3P1−θP4P1−θP2P1+θZ1P1+θZ1P1=π−(180°−arctan 43)−(180°−arctan 23)−90°+90°+90°=−3.2°φP2=3.2°φZ1=π-θZ2Z1-θP1Z1+θP2Z1+θP3Z1+θP4Z1=π-90°+90°+90°+(180°-arctan3-√33)+(180°-arctan3+√33)=189.5°φZ2=−189.5°画出根轨迹图如下:(2)①n=3,m=1,总共3条根轨迹,一条趋于零点,两条趋于无穷远,其中零极点分别为P1= 0,P2=-2,P3=-5,Z1=-8②确定实轴上轨迹[-8,-5],[-2,0]③渐近线φa=(2k+1)πn−m=(2k+1)π2={π2,k=0−π2,k=−1σa=∑(−P j)−nj=1∑(−Z i)mi=1n−m=0.5④确定根轨迹分离点1 d+8=1d+1d+5+1d+2得出d=-0.95⑤确定根轨迹与虚轴交点,令s=jω代入特征方程,{ω(10−ω2+k 0)=08k 0−7ω2=0⇒{ω=±8.9k 0=70画出根轨迹图如下4-5已知单位负反馈控制系统的开环传递函数为*()(2)(4)k K G s s s s =++,若已知一对复数主导极点的阻尼比0.707ξ=,求对应的根轨迹增益*K ,相对应的主导极点和另一极点 解:0.707ξ=,β=45°,因而设一对主极点(-a,ja ),(-a,-ja)arctana 2−a +arctan a4−a+135°=180° 根据三角和公式得:a 2−a +a4−a 1−a 2−a a 4−a=1得a =0.764一对主极点分别为(-0.764,j0.764),(-0.764,-j0.764)K =|s-p 1|×|s-p 2|×|s-p 3|=√0.7642+0.7642+√(2-0.764)2+0.7642+√(4-0.764)2+0.7642=4.93s 1+s 2+s 3=p 1+p 2+p 3=−6 s 3=−6+(2×0.764)=−4.484-6 已知单位负反馈控制系统的开环传递函数为*2()(3)kKG ss s=+(1)试用MA TLAB绘制该系统的根轨迹图,并确定系统稳定的*K值范围(2)若增加一个开环零点2z=-,则根轨迹有什么变化?系统的稳定性有什么变化?(1)num=[1];den=[1,3,0,0];>> rlocus(num,den);系统不稳定(2)> num=[1,2];den=[1,3,0,0];>> rlocus(num,den);根轨迹全部在左半平面,变为完全稳定系统4-7已知单位负反馈控制系统的开环传递函数为*()(3)kKG ss s=+(1)试用MA TLAB绘制该系统的根轨迹图,并确定系统稳定的*K值范围(2)若增加一个开环极点1p=-,则根轨迹有什么变化?系统的稳定性有什么变化?num=[1];den=[1,3,0];>> rlocus(num,den);系统稳定,k范围(0-∞)num=[1];den=[1,4,3,0];>> rlocus(num,den);稳定性变差,是系统稳定的K值范围缩小,(0-11.8)4-8 设系统闭环特征方程为32440s s s a +++=,试画出以a 为参量的系统根轨迹,并判断系统的稳定性。
第四章 根轨迹法习题4-1 系统的开环传递函数为 )4)(2)(1()()(*+++=s s s Ks H s G试证明点311j s +-=在根轨迹上,并求出相应的根轨迹增益*K 和开环增益K 。
4-2 已知开环零、极点如图4-2 所示,试绘制相应的根轨迹。
4-3 单位反馈系统的开环传递函数如下,试概略绘出系统根轨迹。
⑴ )15.0)(12.0()(++=s s s Ks G ⑵ )3)(2()5()(*+++=s s s s K s G ⑶ )12()1()(++=s s s K s G4-4单位反馈系统的开环传递函数如下,试概略绘出相应的根轨迹。
⑴ )21)(21()2()(*j s j s s K s G -++++=⑵ )1010)(1010()20()(*j s j s s s K s G -++++=4-5 系统的开环传递函数如下,试概略绘出相应的根轨迹。
⑴ )208()()(2++=*s s s Ks H s G ⑵ )5)(2)(1()()(+++=*s s s s Ks H s G⑶ )22)(3()2()()(2++++=*s s s s s K s H s G ⑷ )164)(1()1()()(2++-+=*s s s s s K s H s G4-6 已知单位反馈系统的开环传递函数)(s G ,要求: (1)确定)20)(10()()(2+++=*s s s z s K s G 产生纯虚根为1j ±的z 值和*K 值;(2)概略绘出)23)(23)(5.3)(1()(j s j s s s s Ks G -+++++=*的闭环根轨迹图(要求确定根轨迹的渐近线、分离点、与虚轴交点和起始角)。
4-7 已知控制系统的开环传递函数为 22)94(2)()(+++=*s s s K s H s G )(试概略绘制系统根轨迹。
4-8 已知系统的开环传递函数为)93()(2++=*s s s Ks G试用根轨迹法确定使闭环系统稳定的K 值范围。
习题4.1 已知下列负反馈的开环传递函数,应画零度根轨迹的是:(A)A *(2)(1)K s s s -+B *(1)(5)K s s s -+C *2(31)K s s s -+D *(1)(2)K s s s --4.2 若两个系统的根轨迹相同,则有相同的:(A)A 闭环零点和极点B 开环零点C 闭环极点D 阶跃响应4.3 己知单位负反馈控制系统的开环传递函数为*()()(6)(3)K G s H s s s s =++ (1) 绘制系统的根轨迹图(*0K <<∞);(2) 求系统临界稳定时的*K 值与系统的闭环极点。
解:系统有三个开环极点分别为10p =、23p =-、36p =-。
系统有3条根轨迹分支,分别起始于开环极点,并沿渐进线终止于无穷远。
实轴上的根轨迹区段为(],6-∞-、[]3,0-。
根轨迹的渐近线与实轴交点和夹角分别为()()36 33a σ-+-==-,() (0)321 (1)3 (2)3a k k k k πϕππ⎧=⎪+⎪===⎨⎪⎪-=⎩求分离点方程为111036d d d ++=++ 经整理得2660d d ++=,解方程得到1 4.732d =-、2 1.268d =-。
显然分离点位于实轴上[]3,0-间,故取2 1.268d =-。
求根轨迹与虚轴交点,系统闭环特征方程为32*()9180D s s s s K =+++=令j s ω=,然后代入特征方程中,令实部与虚部方程为零,则有[][]2*3Re (j )(j )190Im (j )(j )1180G H K G H ωωωωωωω⎧+=-+=⎪⎨+=-+=⎪⎩解之得 *00K ω=⎧⎨=⎩、*32162K ω⎧=±⎪⎨=⎪⎩显然第一组解是根轨迹的起点,故舍去。
根轨迹与虚轴的交点为j32s =±,对应的根轨迹增益*162K =为临界根轨迹增益。
根轨迹与虚轴的交点为临界稳定的2个闭环极点,第三个闭环极点可由根之和法则求得1233036j32j32λλλλ--=++=+解之得39λ=-。
1. 自动控制系统对输入信号的响应,一般都包含两个分量,即一个是____________,另一个是__________分量。
2. 函数f(t)=te63-的拉氏变换式是________________________________。
3. 积分环节的传递函数表达式为G (s )=_________________________。
4.在斜坡函数的输入作用下,___________型系统的稳态误差为零。
四、控制系统结构图如图2所示。
(1)希望系统所有特征根位于s 平面上s =-2的左侧区域,且ξ不小于0.5。
试画出特征根在s 平面上的分布范围(用阴影线表示)。
(2)当特征根处在阴影线范围内时,试求,K T 的取值范围。
(20分)五、已知系统的结构图如图3所示。
若()21()r t t =⨯时,试求(1)当0f K =时,求系统的响应()c t ,超调量%σ及调节时间s t 。
(2)当0f K ≠时,若要使超调量%σ=20%,试求f K 应为多大?并求出此时的调节时间s t 的值。
(3)比较上述两种情况,说明内反馈f K s 的作用是什么? (20分)图3六、系统结构图如图4所示。
当输入信号()1()r t t =,干扰信号()1()n t t =时,求系统总的稳态误差e ss 。
(15分)图41、 根轨迹是指_____________系统特征方程式的根在s 平面上变化的轨迹。
2、 线性系统稳定的充分必要条件是闭环传递函数的极点均严格位于s______________半平面3、在二阶系统中引入比例-微分控制会使系统的阻尼系数________________。
9、已知单位反馈系统的开环传递函数50 ()(0.11)(5)G ss s s=++,则在斜坡信号作用下的稳态误差为_________。
3、某控制系统的方框图如图所示,试求(16分)(1)该系统的开环传递函数)(sGk、闭环传递函数)()(sRsC和误差传递函数)()(sRsE。
(2)若保证阻尼比0.7ξ=和单位斜坡函数的稳态误差为0.25sse=,求系统参数K和τ。
(3) 计算超调量和调节时间。
1、已知单位反馈系统的开环传递函数为*()()(2)(3)KG s H ss s s,试绘制闭环系统的根轨迹,并判断使系统稳定的*K范围。
R(s)C(s)-2KsN(s)1K5.图46.在二阶系统中引入测速反馈控制会使系统的开环增益________________。
7.已知单位反馈系统的开环传递函数100()(0.11)(5)G ss s=++,则在斜坡信号作用下的稳态误差为________________。
8.闭环系统的稳定性只决定于闭环系统的________________。
六、控制系统方块图如图所示,要求系统性能指标σ%=20%,t p =1s ,求:(16分)R(S)C(S)_Ks(s+1)1sτ+(1)系统闭环传递函数)()(s R s C 和误差传递函数)()(s R s E 。
(2)系统阻尼比,自然振荡频率n。
(3)确定K 与τ的值。
(4)计算调节时间t s 。
(5)求输入为r(t)=2t 时系统的稳态误差。
1、设某控制系统的开环传递函数为*2()(22)K G s s s s =++,试绘制参量*K 由0变至∞时的根轨迹图,并判断使系统稳定的*K 范围。
3、某反馈控制的特征函数)5s 1)(2s .01()5s .01)(1s .01()s (H )s (G 1)s (F ++++=+=,则该系统的开环极点,为闭环极点为。
4、如下图所示系统的开环放大倍数为,当输入信号4=)t (r 时,系统稳态误差为,当输入信号4=)t (r t 时,系统稳态误差为。
1、若系统(或元件)的某输入 输出的拉氏变换分别为)(),(0s x s x i ,对应的传递函数记为G(s),则下列说法是不正确的有( ) A 在零初始条件下,)()(0s X s X i =G(s);B )()(G (s)0s X s X i =,描述了系统的全部信息;C 若g(t)为单位脉冲响应,则L[g(t)]G(s)=;D G(s)反映了系统本身的固有特性。
1、如下图所示系统,其单位阶跃响应曲线h(t)所示,试确定参数k 及a 。
四、绘图题(每题15分,共30分) 1、已知某系统的开环传递函数为)2)(1()()(++=s s s Ks H s G ,1)画出以K 为参数的闭环系统根轨迹图; 2)求出使系统稳定的K 值范围。
1.采用负反馈形式连接后○A. 一定能使闭环系统稳定;B. 系统动态性能一定会提高;C. 一定能使干扰引起的误差逐渐减小,最后完全消除;D. 需要调整系统的结构参数,才能改善系统性能。
.系统特征方程为 0632)(23=+++=s s s s D ,则系统○ A. 稳定; B. 临界稳定; C. 右半平面闭环极点数2=Z ; D. 型别1=v 。
4.系统在2)(t t r =作用下的稳态误差∞=ss e ,说明○ A. 型别2<v ;B. 系统不稳定;C. 输入幅值过大;D. 闭环传递函数中有一个积分环节。
七.(20分)系统结构图如图1所示 (1) 写出闭环传递函数)(s Φ表达式; (2) 要使系统满足条件:707.0=ξ,2=n ω,试确定相应的参数K 和β;(3) 求此时系统的动态性能指标(s t ,00σ);(4) t t r 2)(=时,求系统的稳态误差ss e ;(5) 确定)(s G n ,使干扰)(t n 对系统输出)(t c 无影响。
R三.(15分)单位反馈系统的开环传递函数为 2*)3()(+=s s K s G (1) 绘制∞→=0*K 时的系统根轨迹(确定渐近线,分离点,与虚轴交点); (2) 确定使系统满足10<<ξ的开环增益K 的取值范围;(3) 定性分析在10<<ξ范围内,K 增大时,s t ,0σ以及t t r =)(作用下ss e 的变化趋势(增加/减小/不变)。
2、单位反馈系统稳态速度误差的正确含义是:A 、在 ()1()r t R t =⋅时,输出速度与输入速度的稳态误差;B 、在()1()r t R t =⋅时,输出位置与输入位置的稳态误差;C 、在()r t V t =⋅时,输出位置与输入位置的稳态误差;D 、在()r t V t =⋅时,输出速度与输入速度的稳态误差。
3、系统的开环传递函数为两个“S ”多项式之比()()()M S G S N S =,则闭环特征方程为: A 、N(S) = 0 B 、N(S)+M(S) = 0C 、1+N(S) = 0D 、与是否为单位反馈系统有关4、非单位反馈系统,其前向通道传递函数为G(S),反馈通道传递函数为H(S),则输入端定义的误差E(S)与输出端定义的误差*()E S 之间有如下关系:A 、*()()()E S H S E S =⋅ B 、*()()()E S H S E S =⋅C 、*()()()()E S G S H S E S =⋅⋅D 、*()()()()E S G S H S E S =⋅⋅5、已知下列负反馈系统的开环传递函数,应画零度根轨迹的是:A 、*(2)(1)K s s s -+B 、*(1)(5K s s s -+)C 、*2(31)K s s s +-D 、*(1)(2)K s s s -- 7、一阶系统的闭环极点越靠近S 平面原点:A 、准确度越高B 、准确度越低C 、响应速度越快D 、响应速度越慢 9、若两个系统的根轨迹相同,则有相同的:A 、闭环零点和极点B 、开环零点C 、闭环极点D 、阶跃响应3、某单位反馈系统的开环传递函数为 (本题15分)*(1)()()(3)K S G S H S S S +=-(1) 绘制K 从0 ~ ∞变化的根轨迹(要求出:分离点、与虚轴的交点等); (2) 求系统稳定且为欠阻尼状态时开环增益K 的取值范围。
4、 已知单位负反馈系统的开环传递函数为 ()(0.11)(0.21)KG S s s s =++,试求:(本题15分)a) 使系统稳定的K 值;b) 若r(t) = 2t +2时,要求系统的稳态误差为0.25,问K 应取何值。
3.某控制系统受到阶跃信号作用后,系统输出量呈增幅振荡,则此系统是( )系统A .稳定B .不稳定C .稳定边界D .可能稳定也可能不稳定5.典型二阶系统的单位阶跃响应在阻尼比( )时为等幅振荡A .0=ξB .10<<ξ C.0<ξD.1>ξ8.已知某单位负反馈控制系统在斜坡函数作用下,稳态误差为定值(不为0),则此系统为( )系统A .0型B .I 型C .Ⅱ型D .Ⅲ型12.拉氏变换的初值定理为=→)(lim 0t f t ________。
14.传递函数是在________条件下________之比。
八.一控制系统的单位阶跃响应为t te e t c 10602.12.01)(---+=。
(1)求系统的闭环传递函数;(2)计算系统的无阻尼自然频率n ω和系统的阻尼比ξ。
(提示:解法1:根据拉氏变换,求出输出量的复数域形式,根据输入量为单位阶跃信号,可求得闭环传递函数,进而可求得阻尼比与无阻尼自然振荡频率。
解法2:从阶跃响应的时域形式上可以看出:响应曲线无超调,无振荡,系统处于过阻尼状态,指数函数的两个指数系数即为两个时间常数的倒数,根据1221122()()n n T T s s s s ςωω++=++可求得阻尼比和无阻尼自然频率。
根据稳态分量可求得开环增益。
)九(讲).单位反馈系统的开环传递函数为)1025)(1()(2+++=s s s Ks G(a) 当K =1时,求系统在r (t )=1(t )作用下的稳态误差;(b) 当r (t ) =1(t )时,为使稳态误差6.0=ss e ,试确定K 值。
25.设单位反馈控制系统的开环传递函数为 )11.0(100)(+=s s s G试求当输入信号t t t r 2)(1)(+=时系统的稳态误差ss e 。
26.设下图是简化的飞行控制系统结构图,试选择参数K 1和Kt ,使系统n ω=16-s 、ζ=1。
27.已知单位负反馈系统的开环传递函数为)3()1()()(-+=s s s K s H s G ,绘制系统的根轨迹并求出K=10时系统的闭环极点。
28.设负反馈系统的开环传递函数为)3)(2()()(*++=s s K s H s G ,试绘制系统根轨迹的大致图形。
29.一单位反馈系统的开环传递函数为)1()1()(*-+=s s s K s G(1) 画出以*K 为参变量的根轨迹,并证明复数部分的根轨迹是以)0,1(j -为圆心,半径为2圆的一部分;(2) 根据所作的根轨迹图,确定系统稳定的*K 值范围。