超弹性材料本构关系不同构造方法
- 格式:docx
- 大小:51.32 KB
- 文档页数:3
胶黏剂超弹性理论及ABAQUS仿真案例总结摘要:一部胶黏剂固化后呈现的是橡胶这种超弹性状态,对齐固化后的性能研究与计算基本等于橡胶超弹性研究。
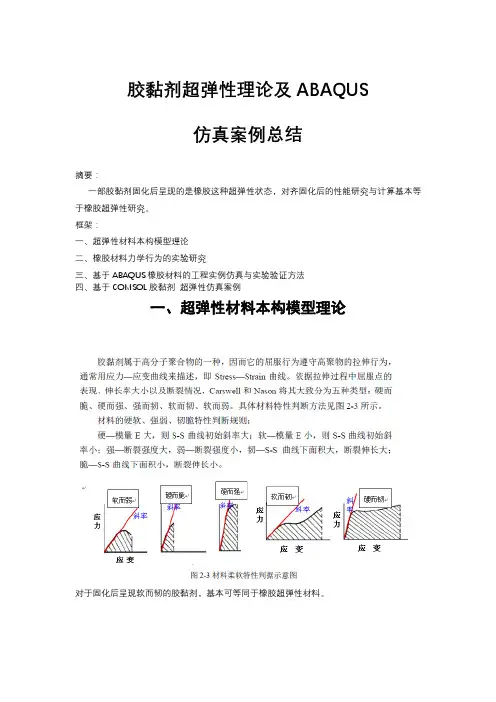
框架:一、超弹性材料本构模型理论二、橡胶材料力学行为的实验研究三、基于ABAQUS橡胶材料的工程实例仿真与实验验证方法四、基于COMSOL胶黏剂超弹性仿真案例一、超弹性材料本构模型理论对于固化后呈现软而韧的胶黏剂,基本可等同于橡胶超弹性材料。
二、橡胶材料力学行为的实验研究2.1引言试验设计与研究是材料设计的关键,主要研究各类配合剂与材料性能,诸如力学性能、功能性能、耐久性及加工性能等之间的相关性,进而从中解析材料组分的品种、类型和用量对橡胶材料性能的影响规律。
本章主要是通过对密封件橡胶试样EP7001和EP7118F进行单向拉伸的准静态力学实验,研究分析橡胶的各种力学行为,主要包括橡胶的Mullins效应及其能量损耗、橡胶材料的应力应变行为和起始模量、橡胶材料力学行为的调制应变相关性、橡胶材料变形行为的率相关性以及橡胶材料应力行为的应变历史相关性等。
另外,还特别针对9种不同体积含量的N330炭黑填充天然橡胶材料进行了单向拉伸的准静态力学实验,研究分析炭黑的填充对硫化橡胶相关力学行为的影响规律。
2.2橡胶材料试样的制备及实验准备在试验方法中,拉伸试验是评价力学、机械特性最基本的方法,所以在各国标准中都放在首要位置。
拉伸试验时,采用某橡胶制品公司生产的EP7001橡胶、EP7118F橡胶以及天然(NR)橡胶为原材料,所制备试样的形状与尺寸满足国家标准《硫化橡胶或热塑性橡胶拉伸应力应变性能的测定》(GB/T528-2009)中“1型”哑铃状试样的要求,试样狭窄部分的标准厚度为2mm。
试验在美特斯工业系统(中国)有限公司生产的CMT4104微机控制电子万能试验机上进行,如图2-1所示,其力值和位移精度均为0.5级,大变形传感器选用25mm标距,夹具选用偏心轮夹具PA103A,此夹具特别适用于橡胶材料的拉伸试验,随着拉伸力的增大,夹具钳口对试样的夹持也越来越紧,避免了试样夹持部分的打滑。
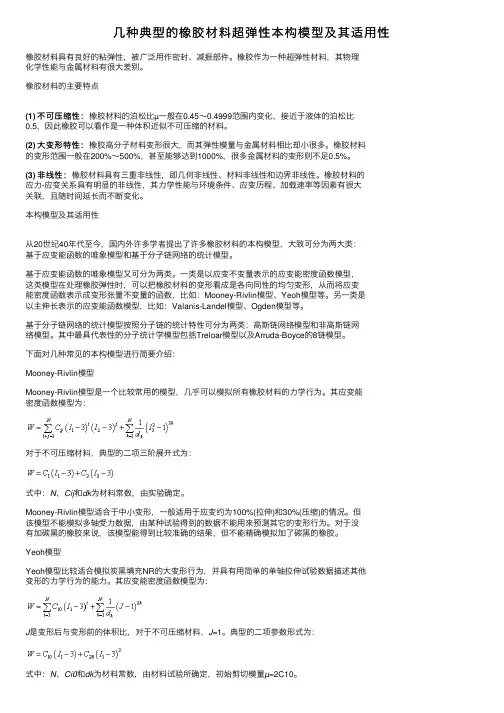
⼏种典型的橡胶材料超弹性本构模型及其适⽤性橡胶材料具有良好的粘弹性,被⼴泛⽤作密封、减振部件。
橡胶作为⼀种超弹性材料,其物理化学性能与⾦属材料有很⼤差别。
橡胶材料的主要特点不可压缩性:橡胶材料的泊松⽐µ⼀般在0.45~0.4999范围内变化,接近于液体的泊松⽐(1) 不可压缩性:0.5,因此橡胶可以看作是⼀种体积近似不可压缩的材料。
⼤变形特性:橡胶⾼分⼦材料变形很⼤,⽽其弹性模量与⾦属材料相⽐却⼩很多。
橡胶材料(2) ⼤变形特性:的变形范围⼀般在200%~500%,甚⾄能够达到1000%,很多⾦属材料的变形则不⾜0.5%。
(3) ⾮线性:⾮线性:橡胶材料具有三重⾮线性,即⼏何⾮线性、材料⾮线性和边界⾮线性。
橡胶材料的应⼒-应变关系具有明显的⾮线性,其⼒学性能与环境条件、应变历程、加载速率等因素有很⼤关联,且随时间延长⽽不断变化。
本构模型及其适⽤性从20世纪40年代⾄今,国内外许多学者提出了许多橡胶材料的本构模型,⼤致可分为两⼤类:基于应变能函数的唯象模型和基于分⼦链⽹络的统计模型。
基于应变能函数的唯象模型⼜可分为两类。
⼀类是以应变不变量表⽰的应变能密度函数模型,这类模型在处理橡胶弹性时,可以把橡胶材料的变形看成是各向同性的均匀变形,从⽽将应变能密度函数表⽰成变形张量不变量的函数,⽐如:Mooney-Rivlin模型、Yeoh模型等。
另⼀类是以主伸长表⽰的应变能函数模型,⽐如:Valanis-Landel模型、Ogden模型等。
基于分⼦链⽹络的统计模型按照分⼦链的统计特性可分为两类:⾼斯链⽹络模型和⾮⾼斯链⽹络模型。
其中最具代表性的分⼦统计学模型包括Treloar模型以及Arruda-Boyce的8链模型。
下⾯对⼏种常见的本构模型进⾏简要介绍:Mooney-Rivlin模型Mooney-Rivlin模型是⼀个⽐较常⽤的模型,⼏乎可以模拟所有橡胶材料的⼒学⾏为。
其应变能密度函数模型为:对于不可压缩材料,典型的⼆项三阶展开式为:式中:N、Cij和dk为材料常数,由实验确定。
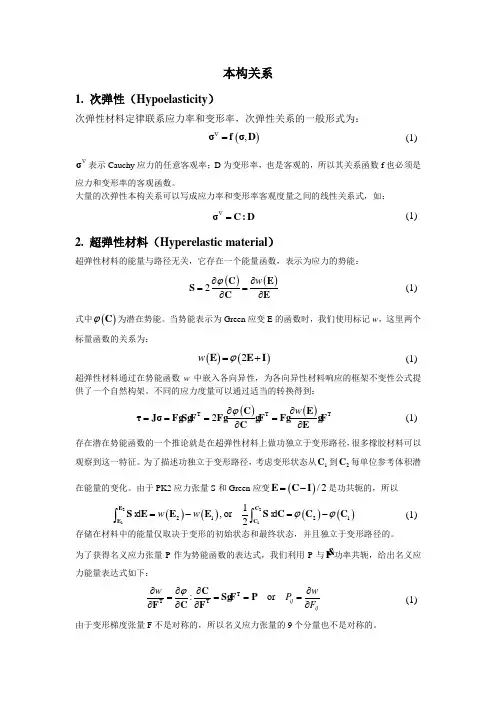
本构关系1. 次弹性(Hypoelasticity )次弹性材料定律联系应力率和变形率,次弹性关系的一般形式为:(),∇=σf σD (1)∇σ表示Cauchy 应力的任意客观率;D 为变形率,也是客观的,所以其关系函数f 也必须是应力和变形率的客观函数。
大量的次弹性本构关系可以写成应力率和变形率客观度量之间的线性关系式,如:∇=σC :D (1)2. 超弹性材料(Hyperelastic material )超弹性材料的能量与路径无关,它存在一个能量函数,表示为应力的势能:()()2w ϕ∂∂==∂∂C E S C E (1)式中()ϕC 为潜在势能。
当势能表示为Green 应变E 的函数时,我们使用标记w ,这里两个标量函数的关系为:()()2w ϕ=+E E I (1)超弹性材料通过在势能函数w 中嵌入各向异性,为各向异性材料响应的框架不变性公式提供了一个自然构架。
不同的应力度量可以通过适当的转换得到:()()T T T 2w ϕ∂∂====∂∂C E τJ σF S F F F F F C E (1)存在潜在势能函数的一个推论就是在超弹性材料上做功独立于变形路径,很多橡胶材料可以观察到这一特征。
为了描述功独立于变形路径,考虑变形状态从1C 到2C 每单位参考体积潜在能量的变化。
由于PK2应力张量S 和Green 应变()/2=-E C I 是功共轭的,所以()()()()221121211d ,or d 2w w ϕϕ=-=-⎰⎰E C E C S :E E E S :C C C (1)存储在材料中的能量仅取决于变形的初始状态和最终状态,并且独立于变形路径的。
为了获得名义应力张量P 作为势能函数的表达式,我们利用P 与F功率共轭,给出名义应力能量表达式如下:T T T :or ij ijw w P F ϕ∂∂∂∂====∂∂∂∂C S F P F C F (1)由于变形梯度张量F 不是对称的,所以名义应力张量的9个分量也不是对称的。
橡胶材料特性和本构关系1概述在汽车行业中,橡胶材料的概念不局限于天然橡胶,而是指任何与天然橡胶具有类似力学特性的材料。
橡胶实际是高分子聚合物(分子量一般在10万以上),具有其它材料所没有的高弹性,因而也称为超弹性材料。
天然橡胶源于南美洲的哭泪树,即三叶橡胶树,树皮割开后流出的胶乳干燥凝固后就是天然橡胶。
合成橡胶则是由不同单体用化学方法聚合而成,单体有丁二烯、苯乙烯、丙烯腈、异丁烯、氯丁二烯等多种,主要来源于石油提炼物。
图1 橡胶大分子长链结构橡胶的大分子是长链结构,这种分子结构使橡胶制品受热变软、遇冷发脆、不易成型、易磨损、易溶于有机溶剂,所以橡胶必须经过硫化处理来改善性能。
在一定的温度和压力条件下,生胶与硫化剂发生化学反应,橡胶大分子由长链结构交联成三维网状结构,从而具备了较高的弹性、耐热性、拉伸强度和在有机溶剂中的不溶解性等性能。
图2 炭黑对橡胶大分子的吸附橡胶通常还要使用炭黑来补强性能。
炭黑通过吸附橡胶分子和形成包容达到增强效果;炭黑粒子之间本身还会形成二级网络,二级网络以及橡胶分子-炭黑粒子之间的网络在橡胶变形的过程中会发生破坏与重构。
所以橡胶中加入炭黑后,其拉伸强度、硬度和耐磨性能都会有明显的提高。
2橡胶材料的力学特性橡胶材料的力学特性可分为超弹性和粘弹性两类。
超弹性特性主要表现为低模量和高延展性、非线性应力应变曲线和几乎不可压缩性;粘弹性特性主要表现为蠕变和应力松弛、滞后特性、动态软化特性和温度效应。
2.1 橡胶材料的超弹性特性低模量和高延展性是橡胶材料最明显也最重要的物理特性。
图3为天然橡胶的应力-伸长率曲线,伸长率可达500%~1000%。
在小应变范围内橡胶的杨氏模量(由曲线正切值代表)在1.0MPa数量级。
这种高可伸展性和低模量与金属材料恰好相反,对常见的钢铁而言,杨氏模量的值约为200GPa,最大弹性延伸率约为10%或更低。
图3 硫化橡胶的典型拉身应力—伸长率曲因为低模量和高延展性,橡胶在较小的应力作用下就能发生高度变形,而且常常伴随着大转动。
超弹性材料本构关系不同构造方法超弹性材料是一类具有非常高的形变能力和弹性恢复能力的材料。
它们能够在受到变形时存储大量的应变能量,并在去除外部作用力后迅速恢复其原始形状。
超弹性材料的本构关系描述了材料在应力和应变之间的关系,不同构造方法可以用来设计和制备这类材料。
以下将介绍几种常见的超弹性材料本构关系的构造方法。
1.线性弹簧模型:线性弹簧模型是最简单的超弹性材料本构关系模型之一、它假设材料的应力与应变之间的关系是线性的,即应力与应变之间存在一个线性的比例关系。
这个模型常用于一些简单的超弹性材料,如弹簧和橡胶带等。
线性弹簧模型的本构关系可以用胡克定律来表示,即应力等于弹性系数乘以应变。
2.双杆模型:双杆模型是一种常用于描述金属材料等超弹性材料的本构关系。
它假设材料由两个相互行为不同的杆组成,其中一个杆具有线弹性,而另一个杆则具有非线性超弹性。
这个模型的关键在于调整两个杆的弹性常数和应变阈值,以使整体材料具有超弹性的特性。
3.并联弹簧模型:并联弹簧模型是一种将多个线性弹簧并联起来以构造超弹性材料本构关系的方法。
通过调整每个弹簧的弹性系数和长度,可以实现材料的超弹性特性。
这种方法能够模拟材料在受到多个作用力时的应变能量存储和释放机制。
4.形状记忆合金模型:形状记忆合金是一种常见的超弹性材料。
它具有在不同温度下具有不同形状的特性。
形状记忆合金模型的构造方法基于对材料的相变和微观结构进行建模。
通过改变材料的温度,可以引发相变,从而实现材料的形状记忆功能。
总结起来,超弹性材料的本构关系可以通过多种不同的构造方法来实现。
这些方法包括线性弹簧模型、双杆模型、并联弹簧模型和形状记忆合金模型等。
通过调整不同构造方法中的参数和结构,可以实现材料的不同超弹性特性。
这些构造方法为设计和制备新型超弹性材料提供了一定的指导和思路。
超弹性材料本构关系不同构造方法超弹性材料本构关系不同构造方法在推导本构关系时不同的文献所定义的应力、应变并不相同,如阿尔曼西应变e 对应柯西应力(Cauchy 应力)σ;变形梯度率?F 对应第一P-K 应力P ;格林应变(Green 应变)E 对应第二P-K 应力T 。
它们的定义和转化关系如下:变形梯度F 右柯西-格林张量F F C T = Cauchy 变形张量1--=F F c T 左柯西-格林张量T FF b = 格林应变张量(Lagrange 或Green 应变):)(21I C E -=阿尔曼西应变(欧拉应变):)(211--=b I e 两者转换关系:1--=EF F e T第一P-K 应力张量T F J P -?=σ第二P-K 应力张量T F JF T --=σ1两者转换关系P F T 1-=其中因为第一P-K 应力不是对称的二阶张量,在实际应用中很少用到,而且ABAQUS 在计算超弹性材料本构行为,不采用率形式的本构关系,而采用全量形式的本构关系,而第一P-K 应力却对应变形梯度率?F 。
但是通过下面的分析可以得出结论:在《The role of mechanics during brain development 》这篇文献中计算的皮奥拉应力是第一P-K 应力P 。
T F J F P --+=μ?λ?μ)ln(32 (22)在黄克志书中225页,式3.28求出了第二P-K 应力T F F J I C J I T ----+=-+=11)ln ()ln (μλμμλμ (3.28)根据两类P-K 应力转换关系T F P ?=,将上式两端点乘F ,得: T F J F T F P --+=?=)ln (μλμ与文献中的应力表达式(22)吻合,所以文献中的应力为第一P-K 应力。
ABAQUS 在构造超弹性材料本构时用消除体积变形的变形梯度F J F 31*-=则*F 称为“消除了体积变化的变形梯度”,以它为变形梯度,则变形无体积变化,即1)(det *=F以*F 为基础,重新定义了左、右Cauchy-Green 张量C J F F C T 32***-=?= b J F F b T 32***-=?=又定义*b 的三个主不变量,ABAQUS 采用其构造的势能函数),,(**J W W ∏I =最终得出柯西(Cauchy )应力表达I -'=p σσ 偏量部分??∏??-???? ??∏??I +I ??='*******2b b w b W W DEV J σ (2.6) 球量部分JW p ??-= (2.7) ABAQUS 定义的应变张量:d =?ε 为应变率d (2.8) 也可分解为偏量球量部分:I +'=)(31εεεtr小结:ABAQUS 里面用消除了体积变形的变形梯度F J F 31*-=用柯西应力张量I -'=p σσ和应变张量I +'=)(31εεεtr 文献中指出脑白质的生长正式由于弹性体积变形超过一定限度才发生生长,体积变形不能忽略,脑白质生长率 03s 0s J J G J J G e -=-=??(25)使用第一P-K 应力T F J F P -??-+=μ?λ?μ)ln(32和变形梯度率?F 表征应变下一步工作:第一P-K 应力和变形梯度率如何运用到ABAQUS 运算中去,或者与柯西应力、应变如何转换。
橡胶材料超弹性本构模型的简化标定方法本构关系模型-论文网论文摘要:不同于线弹性材料,橡胶这种超弹性材料的本构模型需要试错来确定合适的模型。
本文提出用杆单元的一维模型可以达到块体单元的三维全模型的效果,从而极大缩短试错过程。
论文关键词:超弹性,本构关系模型,标定0、背景橡胶隔振器在舰船上的使用日益广泛。
为了满足不同的功能配置,需要设计不同的橡胶隔振器。
在橡胶隔振器设计过程中,需要对不同设计方案的动力学特性进行评估。
通常采用的试验方法,不仅周期长,而且花费多。
因此,对隔振器进行仿真评估就有了实际的需求。
进行仿真分析必须知道材料的本构模型。
橡胶隔振器通常由金属支撑和橡胶块体组成。
对于金属材料,其力学性能比较简单,通常只有弹性模量和泊松比两个材料参数;对于橡胶这种超弹性(hyperelastic)材料而言,其应力应变关系通常由一条曲线来描述,该曲线由不同形式的本构模型来进行数学表达(如多项式)。
选择合适的本构模型是仿真分析能否成功的关键之一。
通常作法是,根据实验数据通过选取不同模型进行试算来实现,这一试算过程本文称之为标定。
由于不同的实验数据曲线和不同的数学模型之间并不存在明确的对应关系,标定过程可能需要多次的反复试错。
这是一个令人生厌的过程。
因此,尽可能的简化标定过程对于提高工作效率具有显著的意义。
本文以ABAQUS为平台对此进行探讨,以供同行参考。
1、橡胶材料的本构模型在主流的商业有限元软件中,橡胶的本构模型都有涉及。
以本文采用的ABAQUS为例,其橡胶模型主要包括多项式和非多项式两大类,和七个具体命名的模型(Arruda-Boyce,Marlow,Mooney-Rivlin,NeoHooke,Ogden,VanderWaals和Yeoh)。
其中Mooney-Rivlin模型、NeoHooke模型和Yeoh模型是取多项式模型取某个特定项数时的特例。
它们的关系见表1。
表1ABAQUS超弹性材料模型在上述模型中常用的有多项式模型和Ogden模型。
超弹性材料本构关系不同构造方法
在推导本构关系时不同的文献所定义的应力、应变并不相同,如阿尔曼西应变e 对应柯西应力(Cauchy 应力)σ;变形梯度率∙F 对应第一P-K 应力P ;格林应变(Green 应变)E 对应第二P-K 应力T 。
它们的定义和转化关系如下:
变形梯度F 右柯西-格林张量F F C T = Cauchy 变形张量1--=F F c T 左柯西-格林张量T FF b = 格林应变张量(Lagrange 或Green 应变):)(21I C E -=
阿尔曼西应变(欧拉应变):)(2
11--=
b I e 两者转换关系:1--=EF F e T
第一P-K 应力张量T F J P -⋅=σ
第二P-K 应力张量T F JF T --=σ1
两者转换关系P F T 1-=
其中因为第一P-K 应力不是对称的二阶张量,在实际应用中很少用到,而且ABAQUS 在计算超弹性材料本构行为,不采用率形式的本构关系,而采用全量形式的本构关系,而第一P-K 应力却对应变形梯度率∙F 。
但是通过下面的分析可以得出结论:在《The role of mechanics during brain development 》这篇文献中计算的皮奥拉应力是第一P-K 应力P 。
T F J F P -⎥⎦⎤⎢⎣⎡-+=μϑλϑμ)ln(32 (22)
在黄克志书中225页,式3.28求出了第二P-K 应力
T F F J I C J I T ----+=-+=11)ln ()ln (μλμμλμ (3.28) 根据两类P-K 应力转换关系T F P ⋅=,将上式两端点乘F ,得: 与文献中的应力表达式(22)吻合,所以文献中的应力为第一P-K 应力。
ABAQUS 在构造超弹性材料本构时用消除体积变形的变形梯度
F J F 31
*-=
则*F 称为“消除了体积变化的变形梯度”,以它为变形梯度,则
变形无体积变化,即1)(det
*=F 以*F 为基础,重新定义了左、右Cauchy-Green 张量
又定义*b 的三个主不变量,ABAQUS 采用其构造的势能函数 最终得出柯西(Cauchy )应力表达I -'=p σσ 偏量部分⎥⎦
⎤⎢⎣⎡⋅∏∂∂-⎪⎪⎭⎫ ⎝⎛∏∂∂I +I ∂∂='*******2b b w b W W DEV J σ (2.6) 球量部分J
W p ∂∂-= (2.7) ABAQUS 定义的应变张量:d =∇ε 为应变率d (2.8) 也可分解为偏量球量部分:I +'=∙∇∇)(31εεεtr
小结:ABAQUS 里面用消除了体积变形的变形梯度F J F 31*-= 用柯西应力张量I -'=p σσ和应变张量I +'=∙∇∇)(3
1εεεtr
文献中指出脑白质的生长正式由于弹性体积变形超过一定限度才发生生长,体积变形不能忽略,脑白质生长率
03s 0s J J G J J G e -=-=∙ϑ
ϑ (25) 使用第一P-K 应力T F J F P -⎥⎦
⎤⎢⎣⎡-+=μϑλϑμ)ln(32和变形梯度率∙F 表征应变
下一步工作:第一P-K 应力和变形梯度率如何运用到ABAQUS 运算中去,或者与柯西应力、应变如何转换。
以及两种应力应变关系的切线刚度矩阵DDSDDE 的具体数值算法。