自动调整臂工作原理
- 格式:ppt
- 大小:8.31 MB
- 文档页数:8
自动调整臂工作原理
自动调整臂是一种机械装置,用于实现多种工作任务的自动调整。
其工作原理主要包括以下几个步骤:
1. 感知环境:自动调整臂会使用传感器或视觉系统来感知周围的环境和目标物体。
这些传感器可以包括距离传感器、力度传感器、图像传感器等。
2. 收集信息:一旦感知到环境和目标物体,自动调整臂会收集相应的数据和信息。
这些数据可以包括目标物体的位置、形状、质量等。
3. 决策和规划:基于收集到的数据和信息,自动调整臂会进行决策和规划,确定最优的动作方案。
这可能涉及到路径规划、力控制、碰撞检测等算法和技术。
4. 执行动作:一旦确定了最优的动作方案,自动调整臂就会执行相应的动作,调整自身的位置、姿态、速度等来完成工作任务。
这可能涉及到关节控制、伺服控制、运动规划等技术。
5. 反馈控制:自动调整臂会不断地进行反馈控制,根据感知到的环境变化和实际执行的结果,对自身的动作进行调整和修正,以确保达到预期的工作效果。
总的来说,自动调整臂利用感知、信息处理、决策规划和执行控制等技术,通过不断调整自身的位置、姿态和动作,实现多
种工作任务的自动化调整。
这种自动化调整的原理和方法可以应用于各种领域,如工业生产、医疗护理、物流仓储等。
自动调整臂1. 背景介绍自动调整臂是一种用于工业应用的机器人装置,它能够自动调整自身的姿态和位置,以适应各种工作环境和任务需求。
这种装置通常由多个关节组成,每个关节都能够运动并调整自身的角度和位置。
自动调整臂在许多领域都有广泛的应用,包括自动化生产线、仓储系统、医疗器械等等。
2. 工作原理自动调整臂的工作原理主要包括以下几个方面:2.1 传感器检测自动调整臂通常配备有多个传感器,用于感知周围的环境和目标物体的位置。
常见的传感器包括视觉传感器、力传感器、位置传感器等。
这些传感器能够实时采集环境信息,并传递给控制系统进行处理。
2.2 控制系统控制系统是自动调整臂的核心部分,它负责接收传感器采集到的数据,并根据预先设定的任务要求进行分析和决策。
控制系统能够计算出自动调整臂需要调整的姿态和位置,并输出相应的指令。
2.3 电机驱动自动调整臂中的每个关节都由电机驱动,用于实现关节的运动和调整。
电机驱动通常由控制系统发送的指令来控制,它能够通过调整关节的角度和位置,使得整个自动调整臂能够达到预定的目标姿态和位置。
2.4 反馈控制为了更加精确地控制自动调整臂的运动,通常会采用反馈控制的方法。
反馈控制通过不断检测调整臂的实际位置和姿态,并与目标位置和姿态进行比较,从而调整控制指令,使得自动调整臂能够更加准确地达到目标。
3. 应用场景自动调整臂在许多领域都有广泛的应用,以下是一些常见的应用场景:3.1 自动化生产线在自动化生产线中,自动调整臂可以用于搬运、拼装、焊接等工作。
它能够根据生产线上的物体位置和姿态进行自动调整,从而完成各种复杂的任务。
3.2 仓储系统在仓储系统中,自动调整臂可以用于货物的搬运和堆垛。
它可以根据货物的位置和重量进行自动调整,以适应不同大小和重量的货物。
3.3 医疗器械在医疗器械领域,自动调整臂可以用于手术机器人和检测设备等。
它可以根据手术区域和检测要求自动调整自身的姿态和位置,从而完成精确的手术和检测任务。
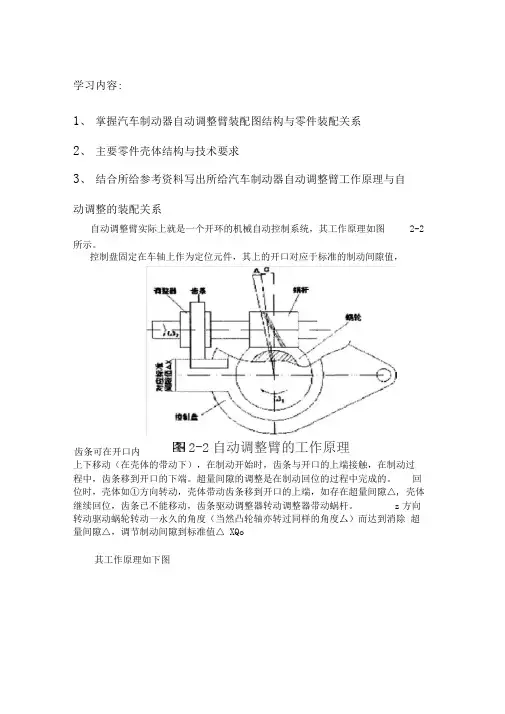
学习内容:1、 掌握汽车制动器自动调整臂装配图结构与零件装配关系2、 主要零件壳体结构与技术要求3、 结合所给参考资料写出所给汽车制动器自动调整臂工作原理与自 动调整的装配关系自动调整臂实际上就是一个开环的机械自动控制系统,其工作原理如图2-2所示。
上下移动(在壳体的带动下),在制动开始时,齿条与开口的上端接触,在制动过 程中,齿条移到开口的下端。
超量间隙的调整是在制动回位的过程中完成的。
回 位时,壳体如①方向转动,壳体带动齿条移到开口的上端,如存在超量间隙△, 壳体继续回位,齿条已不能移动,齿条驱动调整器转动调整器带动蜗杆。
z 方向 转动驱动蜗轮转动一永久的角度(当然凸轮轴亦转过同样的角度厶)而达到消除 超量间隙△,调节制动间隙到标准值△ XQo其工作原理如下图齿条可在开口内2-2自动调整臂的工作原理 控制盘固定在车轴上作为定位元件,其上的开口对应于标准的制动间隙值,⑷(b) w(1)制动间隙处于设计理想状态时。
制动时,制动分泵连接叉推动主臂1逆时针旋转,大蜗杆7推动大蜗轮9,大蜗轮9通过内花键3带动凸轮轴转动实现制动。
在臂体1逆时针转动时,因控制臂5为固定的,与其固定连接的大齿轮4 不动,小齿轮6将沿大齿轮4的节圆滚动,即小齿轮6也逆时针转动;经内爪键17的传动,上端锯齿轮11相应逆时针转动。
当制动间隙在理想状态内时,在上端锯齿轮11逆时针转动过程中,它将压缩顶簧13顺着下端锯齿轮12的锯齿斜而轴向移动,但不会跳齿。
因小蜗杆右端为一单向超越离合器,下端锯齿轮12与小蜗杆不会转动。
解除制动时,制动分泵连接叉推动主臂1顺时针旋转,大蜗杆7推动大蜗轮9,大蜗轮9通过内花键3带动凸轮轴转动解除制动,在臂体1顺时针转动时,小齿轮6将沿大齿轮4的节圆滚动,即小齿轮6也顺时针转动;经内爪键7的传动,上端锯齿轮11相应顺时针转动,同时在顶簧 13作用,顺着下端锯齿轮12的锯齿斜而做反向的轴向移动,其运动的角度和位移均与制动时相同,因血不做间隙调整。
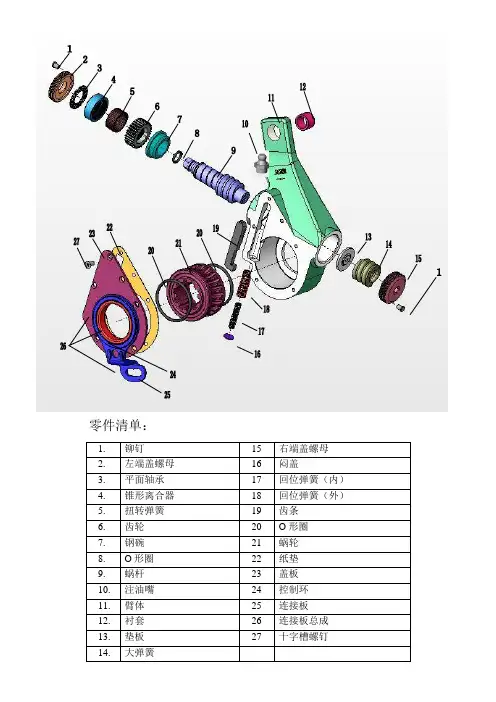
零件清单:1.铆钉15 右端盖螺母2.左端盖螺母16 闷盖3.平面轴承17 回位弹簧(内)4.锥形离合器18 回位弹簧(外)5.扭转弹簧19 齿条6.齿轮20 O形圈7.钢碗21 蜗轮8.O形圈22 纸垫9.蜗杆23 盖板10.注油嘴24 控制环11.臂体25 连接板12.衬套26 连接板总成1.起始位置连接板25被固定在支架上,齿条19与控制环24的槽口上端相接触。
槽口的宽度决定了刹车片与制动鼓之间的设定间隙值。
2.转过间隙角调整臂转过角A。
此时,齿条19向下运动与控制环24的槽口下端接触,制动蹄张开。
当存在超量间隙时,刹车片与制动鼓尚末接触。
3.转过超量间隙角B调整臂继续转动。
此时,齿条19已和控制环24的槽口下端接触(控制环与固定的控制臂被铆为一体),不能继续向下运动。
齿条驱动齿轮6旋转,单向离合器在这个方面可以相对自由转动转过角B后,凸轮轴带动制动蹄进一步张开,致使刹车片与制动鼓相接触。
4.转入弹性角C当调整臂继续转动时,由于刹车片与制动鼓已经相接触,作用在凸轮轴和蜗轮上的力矩迅速增加,蜗轮21作用于蜗杆9上的力(向右)随之增大,使得蜗杆压缩弹簧14并向右移动,从而导致蜗杆9与锥形离合器4分离。
5.转弹性角C调整臂继续转动时,齿条被控制环限制仍然不能向下运动而驱动齿轮转动。
这时由于锥形离合器4与蜗杆9处于分离状态,整个单向离合器总成一起转动。
6.向回转过弹性角C制动开始释放,调整臂向回转过角C。
在回位弹簧17和18的作用下,使得齿条向下紧帖控制环24的槽口下端。
此时,锥形离合器4与蜗杆9仍处于分离状态,齿条可以驱使单向离合器总成自由转动。
7.向回转入间隙角A随着刹车片作用于制动鼓上压力的释放,作用于凸轮轴和蜗轮的力矩消失,蜗轮21向右施加给蜗杆9的力也消失,弹簧14复原,推动蜗杆向左移动,使得蜗杆与锥形离合器4从新啮合。
8.向回转过间隙角A调整臂向回转过A。
齿条19向上运动,与控制环24的槽口的接触从下端变为上端。

气刹自动调整臂原理
嘿,朋友们!今天咱们要来聊聊气刹自动调整臂的原理,这可真是个超级有趣的东西呢!
你想想看啊,气刹自动调整臂就像是汽车刹车系统里的一个小魔法师!比如说,当你的车在路上跑的时候,刹车系统就如同一位忠诚的卫士,时刻守护着你的安全。
而气刹自动调整臂就是这个卫士手中的秘密武器!
它的工作原理其实并不难理解。
简单来说呢,它会根据刹车的使用情况自动调整刹车片和刹车鼓之间的间隙。
哎呀,这就好比你走路的时候,根据路况自动调整步伐的大小和快慢一样自然!
来,咱们具体说说看。
当你踩下刹车踏板,气刹就会发挥作用,这时候自动调整臂就开始忙碌起来啦!它会监测到刹车的动作,然后迅速做出反应,调整到最合适的位置,确保刹车效果达到最佳状态。
就像一个聪明的小精灵,能迅速察觉到危险并采取行动!
“嘿,那要是它出问题了咋办呀?”有人可能会这么问。
哈哈,这就是关键所在啦!如果气刹自动调整臂不能正常工作,那刹车效果可就大打折扣
了,就好像战士失去了锋利的宝剑一样危险!所以平时一定要好好保养和检查它哦!
那在实际生活中,大家可都要重视这个小小的气刹自动调整臂呀。
别小看它,它可是在关键时刻能救你一命的!
我觉得气刹自动调整臂真的太重要啦!它是我们行车安全的重要保障,我们一定要了解它、重视它,这样才能让我们的出行更加安心、更加安全!。
调整臂工作原理调整臂是一种常见的机械装置,用于调整和控制机械系统中的运动部件。
它通常由一个或多个关节组成,可以在不同方向上进行旋转或移动,从而改变机械系统的工作状态。
调整臂的工作原理涉及到力学、动力学和控制理论等多个领域,下面将对其工作原理进行详细介绍。
首先,调整臂的工作原理与其结构密切相关。
一般而言,调整臂由支架、关节和执行器等部件组成。
支架是调整臂的主体框架,用于支撑和固定其他部件;关节是连接支架和执行器的部件,可以实现相对运动;执行器则是根据外部控制信号,对关节进行驱动和控制。
这些部件共同协作,实现调整臂的各种运动功能。
其次,调整臂的工作原理涉及到力学和动力学的知识。
在调整臂的运动过程中,各个部件之间会受到力的作用,这些力会影响调整臂的运动状态和稳定性。
同时,调整臂的运动还涉及到速度、加速度、惯性等动力学参数,这些参数会影响调整臂的响应速度和控制精度。
因此,了解力学和动力学知识对于理解调整臂的工作原理至关重要。
另外,调整臂的工作原理还与控制理论有密切关系。
在现代工业中,许多调整臂都是由电气或液压系统驱动的,因此需要进行精确的控制。
控制理论可以帮助我们设计合适的控制算法,实现对调整臂运动的精准控制。
同时,控制理论还可以帮助我们分析调整臂的稳定性和鲁棒性,从而确保调整臂在各种工况下都能够可靠工作。
总的来说,调整臂的工作原理涉及到多个学科领域的知识,包括结构设计、力学、动力学和控制理论等。
只有全面理解这些知识,才能够深入理解调整臂的工作原理,为实际应用提供技术支持。
在实际应用中,调整臂广泛应用于各种机械系统中,如工业生产线、机器人、汽车生产线等。
它可以帮助我们实现对机械系统的精确控制和调整,提高生产效率和产品质量。
因此,深入理解调整臂的工作原理对于提高机械系统的性能和可靠性具有重要意义。
综上所述,调整臂的工作原理涉及到结构设计、力学、动力学和控制理论等多个领域的知识。
只有全面理解这些知识,才能够深入理解调整臂的工作原理,并在实际应用中发挥其作用。

“铁哥们”制动间隙自动调整臂结构工作原理特点安装及调整方法铁哥们是一种用于汽车制动系统的自动调整臂结构,它可以根据制动间隙的变化自动调整制动器的工作状态,以保持制动器的良好性能。
下面将详细介绍铁哥们的结构、工作原理、特点、安装及调整方法。
1.铁哥们的结构铁哥们由调整臂和调整螺栓组成。
调整臂一端连接在制动器上,另一端连接在铁哥们的调整螺栓上。
调整螺栓通过螺纹连接在制动器支架上,当调整螺栓旋转时,调整臂也会随之移动。
2.铁哥们的工作原理铁哥们的工作原理基于制动器工作时磨损的现象。
当制动器磨损时,制动间隙会增加,导致制动器的工作效果下降。
铁哥们通过调整臂的运动,将制动器螺栓的位置进行微调,从而减小制动间隙,保持制动器的良好性能。
3.铁哥们的特点铁哥们有以下几个特点:-自动调整:铁哥们可以根据制动器的工作状态自动调整,无需人工干预。
-实用可靠:铁哥们的结构简单,使用可靠,能有效提高制动器的性能。
-高度自适应性:铁哥们能够适应不同车辆的制动器磨损情况,具有较高的自适应性。
-低成本:铁哥们的成本相对较低,适合大规模推广应用。
铁哥们的安装非常简单,主要包括以下几个步骤:-将铁哥们的调整臂连接在制动器上。
-将铁哥们的调整螺栓与制动器支架螺纹连接。
-确保调整螺栓旋转灵活,不卡滞。
铁哥们的调整方法如下:-在安装好铁哥们后,首先将制动器完全释放,使制动间隙达到最大。
-踩下制动踏板,使制动器充分接触,形成制动间隙。
-松开制动踏板后,观察制动器的工作情况,若制动间隙仍然过大,则使用工具旋转调整螺栓,将调整臂向内或向外移动,以减小或增大制动间隙,直到达到理想的制动效果为止。
总结:铁哥们是一种可以自动调整制动间隙的结构,它简化了制动器的调整工作,提高了制动器的性能和安全性。
安装和调整铁哥们相对简单,但在使用过程中需要根据实际情况进行适当的调整。
自动调整臂1. 引言自动调整臂是一种用于机器人或机械装置的关节,用于调整臂的姿态或位置。
它可以实现自动调整以适应不同的工作需求,提高生产效率和工作精确度。
本文将介绍自动调整臂的工作原理、应用场景和优势。
2. 工作原理自动调整臂的工作原理包括传感器、控制器和执行机构三个主要组件。
传感器用于感知周围环境和目标物体的位置和姿态信息,控制器根据传感器反馈的信息进行计算和决策,然后通过执行机构控制臂的运动以达到所需的姿态或位置。
传感器可以是多种类型,如光电传感器、压力传感器、力传感器等。
控制器通常使用微处理器或PLC(可编程逻辑控制器),通过算法和控制策略实现对臂的精确控制。
执行机构可以是液压、气动、电动或伺服电机等。
根据具体应用需求,选择合适的执行机构以实现精准的调整。
3. 应用场景自动调整臂在许多领域都有广泛的应用。
下面介绍几个常见的应用场景:3.1 工业生产线在工业生产线上,自动调整臂可以用于装配、焊接、搬运等任务。
通过传感器感知工件的位置和姿态,控制器可以根据预设的程序和算法实现精确的装配或搬运操作,提高生产效率和产品质量。
3.2 医疗领域在医疗领域,自动调整臂可以被用于手术机器人或康复装置中。
它可以精确地控制手术器械或康复设备的位置和力度,帮助医生或康复师进行手术或康复操作,提高手术的精确度和康复效果。
3.3 仓储物流在仓储物流中,自动调整臂可以用于货物的分拣、装载和卸载。
通过传感器感知货物的位置和尺寸,控制器可以根据预设的算法和程序实现货物的精确分拣和装卸,提高物流效率和减少人工操作的误差。
4. 优势自动调整臂具有以下优势:•灵活性:自动调整臂可以根据实际需求进行灵活调整,适应不同的工作场景和任务。
•精准度:通过传感器和控制器的组合,自动调整臂可以实现精确的位置和姿态调整,提高工作精确度。
•自动化:自动调整臂可以实现自动化的工作流程,减少人工操作,提高生产效率。
•安全性:通过传感器和控制器的监测和控制,自动调整臂可以避免意外事故和损坏,提高工作安全性。
学习内容:1、掌握汽车制动器自动调整臂装配图结构与零件装配关系2、主要零件壳体结构与技术要求3、结合所给参考资料写出所给汽车制动器自动调整臂工作原理与自动调整的装配关系自动调整臂实际上就是一个开环的机械自动控制系统,其工作原理如图2-2所示。
控制盘固定在车轴上作为定位元件,其上的开口对应于标准的制动间隙值,齿条可在开口内上下移动(在壳体的带动下),在制动开始时,齿条与开口的上端接触,在制动过程中,齿条移到开口的下端。
超量间隙的调整是在制动回位的过程中完成的。
回位时,壳体如ω方向转动,壳体带动齿条移到开口的上端,如存在超量间隙△,壳体继续回位,齿条已不能移动,齿条驱动调整器转动调整器带动蜗杆。
z方向转动驱动蜗轮转动一永久的角度(当然凸轮轴亦转过同样的角度△)而达到消除超量间隙△,调节制动间隙到标准值△Xo。
其工作原理如下图。
(1)制动间隙处于设计理想状态时。
制动时,制动分泵连接叉推动主臂1逆时针旋转,大蜗杆7推动大蜗轮9,大蜗轮9通过内花键3带动凸轮轴转动实现制动。
在臂体1逆时针转动时,因控制臂5为固定的,与其固定连接的大齿轮4不动,小齿轮6将沿大齿轮4的节圆滚动,即小齿轮6也逆时针转动;经内爪键17的传动,上端锯齿轮11相应逆时针转动。
当制动间隙在理想状态内时,在上端锯齿轮11逆时针转动过程中,它将压缩顶簧13顺着下端锯齿轮12的锯齿斜而轴向移动,但不会跳齿。
因小蜗杆右端为一单向超越离合器,下端锯齿轮12与小蜗杆不会转动。
解除制动时,制动分泵连接叉推动主臂1顺时针旋转,大蜗杆7推动大蜗轮9,大蜗轮9通过内花键3带动凸轮轴转动解除制动,在臂体1顺时针转动时,小齿轮6将沿大齿轮4的节圆滚动,即小齿轮6也顺时针转动;经内爪键7的传动,上端锯齿轮11相应顺时针转动,同时在顶簧13作用,顺着下端锯齿轮12的锯齿斜而做反向的轴向移动,其运动的角度和位移均与制动时相同,因血不做间隙调整。
(2)当制动间隙超过设计值时。
手臂自动化工作原理是什么
手臂自动化工作的原理是通过搭建机械结构和使用电动或气动驱动系统,结合传感器和控制系统实现手臂的灵活运动和自动化操作。
具体工作原理如下:
1. 机械结构:手臂自动化系统通常由几个关节组成,每个关节之间都可以进行旋转或者伸缩。
这种结构可以模拟人的手臂运动,使得手臂具备较大的灵活性和适应性。
2. 驱动系统:手臂的关节通过电动或者气动驱动系统进行运动驱动。
电机或气动缸会根据接收到的指令产生旋转、伸缩等动作,从而实现手臂的精确控制。
3. 传感器:手臂自动化系统通常配备了各种传感器,如力传感器、位移传感器和视觉传感器等。
这些传感器可以检测手臂的位置、力度、接触力等信息,并将其转化为电信号输入到控制系统中。
4. 控制系统:手臂自动化系统的控制系统可以根据传感器收集到的信息进行数据处理,并根据事先设定的程序和算法生成相应的控制指令。
这些控制指令会通过驱动系统,驱动机械结构实现手臂的运动和操作。
综上所述,手臂自动化工作的原理是通过机械结构、驱动系统、传感器和控制系统相互配合,实现手臂的灵活运动和自动化操作。
调整臂工作原理
调整臂是一种机械装置,它通过一系列的杆杆连接组成,并通过电机或气动装置驱动。
它能够实现精确的线性运动,从而实现物体的平移、旋转或抬升。
调整臂的工作原理是基于连杆机构的运动学原理。
调整臂通常由一个或多个连杆组成,每个连杆都通过铰链连接。
其中一个连杆与电机或气动装置的输出轴相连,作为驱动杆,其它连杆则被设计成动力杆或被动杆。
当驱动杆运动时,其它连杆也会跟随运动,从而改变整个调整臂的形状和位置。
调整臂的形状和位置变化取决于连杆的长度、连接位置和驱动杆的运动方式。
通过调整连杆的长度,可以改变调整臂的伸缩程度或摆动角度。
通过改变驱动杆的运动方式,可以实现不同的工作效果,比如线性推动、旋转或抬升。
调整臂的工作原理也可以通过水压或液压系统实现。
在这种情况下,连杆被替换为液压缸或液压活塞,并使用液体的压力来驱动连杆的运动。
液压调整臂常用于重型机械设备或工业生产线上,其提供了更强大的推力和承载能力。
总的来说,调整臂的工作原理是基于连杆机构和驱动装置的组合运动,通过控制驱动杆的运动方式和连杆的长度,可以实现精确的物体调整和运动。
制动间隙自动调整臂结构、工作原理:制动间隙自动调整臂(以下简称自调臂)适用于鼓式制动器。
因为频繁的刹车,制动蹄片与制动鼓的间隙由于摩擦片的磨损而增大,使整车的制动性能大大降低。
手动调整臂通过人工调整制动器的间隙来保证行车的安全;在正常工作情况下的自调臂,则不再需要人工调节间隙,它利用制动和回位过程的推力和拉力使摩擦片与制动鼓之间的间隙保持到预留值,进一步提高车辆安全性。
同时,节约大量维护和保养时间,提高运营经济效益。
1、自调臂的工作原理:自动调整臂比手动调整臂增加了制动间隙的测量和制动间隙的补偿功能。
自调臂利用刹车制动和回位过程的推力与拉力,使螺纹叉c带动齿条a在自调臂转动过程中上下运动,以驱动控制元件使蜗杆b、蜗轮e相对于自调臂转动,来带动制动器凸轮轴转动,使制动间隙变小。
自调臂是通过转角来测量制动间隙,并根据其大小来实现间隙的自动调整,最终稳定在制动间隙的设定值(设定值为0.6~1.0mm)。
行车制动时,自调臂的工作可分解为三部分(见图21):正常间隙角度C (clearance),。
Ce(excessive clearance)和弹性变形角度E(elasticity)过度间隙角度图21:对应于设定的正常蹄、鼓之间的制动间隙,自调臂在该角度范围内C正常间隙角度不调整制动器的间隙。
:对应于因摩擦片的磨损和其它原因产生的大于正常设定值的间隙,Ce过度间隙角度直到制动间隙为正常设定自调臂根据该角度的大小在制动过程中进行制动间隙的自动调整,值、无超量间隙为止。
弹性变形角度E:对应于因摩擦片与制动鼓及传动元件弹性变形引起的角度变化,自调臂在该角度范围内不进行制动间隙的调整。
所以,在正常间隙角度C范围内,自调臂不参与间隙调整,只有当C+Ce>C时,自调臂才进行间隙调整,直至C+Ce=C。
并且任何一次制动过程中的弹性变形E都不参与自动调整。
2、自调臂的结构型式:目前,应用于东风公司中重型商用车的自动调整臂从结构上可以分为两种:一种为带控制臂结构(Bendix结构)的产品,另一种为不带控制臂结构(Haldex结构)的产品。
“铁哥们”制动间隙自动调整臂结构、工作原理、特点、安装及调整方法1.结构组成:制动间隙自动调整臂为阶跃式间隙自动调整装置。
该调整臂主要由壳体、蜗杆、蜗轮、棘轮、棘爪、压缩弹簧及与之相连的滑块、连杆等构件为调整补偿构件。
2.工作原理:2.1无需自动补偿时制动时,气室充气,气室推杆推动调整臂转动,并带动与调整臂中蜗轮相啮合的S-凸轮轴转动,从而打开制动蹄片压住制动鼓产生摩擦力矩,直至制动。
在这期间调整臂转动后消除了制动蹄片与制动鼓间的间隙以及制动蹄片、S-凸轮轴、制动鼓所引起的弹性变形,刹车中由于连接套与气室的推杆相连接从而随着调整臂的转动,使与连接套相连的连杆带动滑块向上窜动,其窜动量设定值等于正常制动时调整臂转动所引起的最大窜动值。
由于棘轮、棘爪的外表面带一定螺旋角的锯齿形斜齿,当棘轮向上运动时由于此时受力面为非工作面,棘爪在棘轮上滑动,当制动间隙没有超过设定值时棘轮上窜动的行程小于棘轮外表面相邻两齿的轴向齿距此时棘轮、棘爪不发生跳齿,制动器放松后,调整臂复位,棘轮和棘爪又返回原位,不进行间隙补偿。
2.2自动补偿时当制动间隙由于摩损而引起增大、增大量超过设定值后棘轮的行程大于相邻两齿的轴向齿距时,在压缩弹簧的作用下棘爪跳过一齿重新啮合。
当制动器放松后调整臂复位时,棘轮返回。
此时棘轮、棘爪齿形工作面为直面,棘轮轴向返回,在棘爪的作用下棘轮会转动一定角度,棘轮和蜗杆是由花键相连接,因此棘轮会带动蜗杆旋转相同角度;蜗杆又带蜗轮转动,同样,蜗杆带动S-凸轮轴也转过同样的角度,既实现了间隙补偿。
3.产品特点:3.1该装置具有检测机构和调整补偿机构,结构紧凑、动作灵活、性能安全可靠,它的安装方法基本与手动调整臂一样,安装十分方便。
3.2由于调整结构被封闭于壳体之内而受到很好的保护,从而避免了受潮、脏物及磕碰等。
3.3不再需要人工调节制动间隙,使车辆制动鼓和蹄片之间的间隙始终保持在一个正常值范围内,大大提高了车辆的制动性能,减小了制动隐患,提高了车辆行驶的安全性,也降低了维护成本。