基于某STM32的机械臂运动控制分析报告设计
- 格式:doc
- 大小:2.39 MB
- 文档页数:25
机器人测控技术大作业课程设计课程设计名称:基于STM32的机械臂运动控制分析设计专业班级:自动1302学生姓名:张鹏涛学号:指导教师:曹毅课程设计时间:2016-4-28~2016-5-16指导教师意见:成绩:签名:年月日目录摘要 (II)第一章运动模型建立................................................................................................ I II1.1引言 ............................................................................................................... I II1.2机器人运动学模型的建立 ............................................................................. I II (IV)第二章机械臂控制系统的总体方案设计 (V)2.1机械臂的机械结构设计 (V)V错误!未定义书签。
2.2机械臂关节控制的总体方案 (VI)2.2.1机械臂控制器类型的确定 (VI)2.2.2机械臂控制系统结构 (VII)2.2.3关节控制系统的控制策略 (VII)第三章机械臂控制系统硬件设计 (VII)3.1机械臂控制系统概述 (VII)3.2微处理器选型 .............................................................................................. V III3.3主控制模块设计 .......................................................................................... V III错误!未定义书签。
机器人测控技术大作业课程设计课程设计名称:基于STM32的机械臂运动控制分析设计专业班级:自动1302学生姓名:张鹏涛学号:201323020219指导教师:曹毅课程设计时间:2016-4-28~2016-5-16目录摘要 (V)第一章运动模型建立...................................................................................... V I1.1引言 ................................................................................................ V I1.2机器人运动学模型的建立.................................................................. V I1.2.1运动学正解 (VIII)第二章机械臂控制系统的总体方案设计 (X)2.1机械臂的机械结构设计 (X)2.1.1臂部结构设计原则 (X)2.1.2机械臂自由度的确定 (XI)2.2机械臂关节控制的总体方案 (XI)2.2.1机械臂控制器类型的确定 (XI)2.2.2机械臂控制系统结构 (XII)2.2.3关节控制系统的控制策略 (XIII)第三章机械臂控制系统硬件设计 (XIII)3.1机械臂控制系统概述 (XIII)3.2微处理器选型 (XIV)3.3主控制模块设计 (XV)3.3.1电源电路 (XV)3.3.2复位电路 (XVI)3.3.3时钟电路 (XVI)3.3.4 JTAG调试电路.................................................................. X VII3.4驱动模块设计................................................................................. X VII3.5电源模块设计.................................................................................. X IX 第四章机械臂控制系统软件设计................................................................... X X4.1初始化模块设计............................................................................... X X4.1.1系统时钟控制....................................................................... X X4.1.2 SysTick定时器 (XXII)4.1.3 TIM定时器 (XXIII)4.1.4通用输入输出接口GPIO (XXIV)4.1.5超声波传感器模块 (XXV)总结 (XXVI)参考文献 (XXVII)附录A ......................................................................................................... X XIX 附录B . (XXX)设计要求:设计一个两连杆机械臂,具体参数自行设计,建立其运动学模型,然后在此基础上完成该机械臂两点间的路径规划,并给出仿真结果。

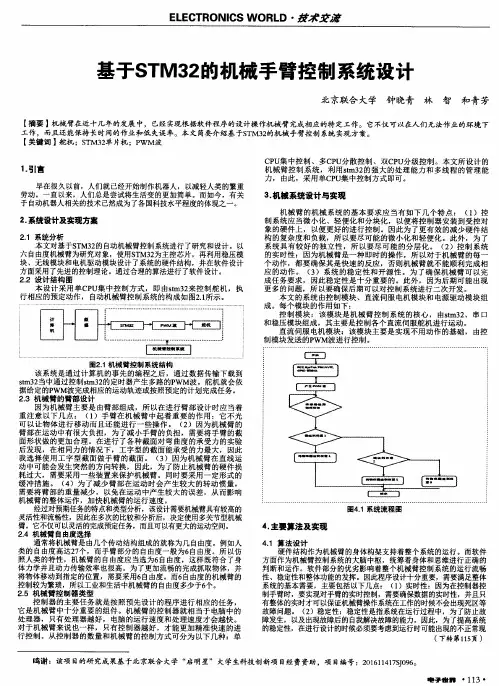
STM32智能包裹分类机器手臂控制系统设计金兆东;孟祥斌;毛红艳;王德君【期刊名称】《电脑知识与技术》【年(卷),期】2015(011)027【摘要】针对传统快递仓储依靠人工手持条码识别器分类效率不高的问题,采用MJ-2060 CCD条码扫描识别模块,利用串行调试进行扫描码信息量的读取和传递.使用STM32微处理器作为主控器,接收扫描信号后,控制机械手臂抓取、上下提升,并运送货品到指定区域.实验仿真及实测结果显示,该设计分类机器手臂装置可以准确地进行分类和传送,是一种性能可靠的智能包裹分类设备.%Handheld bar code reader for express delivery, warehousing rely on traditional artificial classification efficien?cy is not high, the MJ- 2060 CCD barcode scanning recognition module, using serial debugging to scan code reading and transmission of information. As the host controller based on STM32, after receiving scanning signal, control robotic arm grab, ascending, up and down and deliver goods to the designated region. The experimental simulation and mea?sured results show that the design classification machine arm device can accurately category and transmission, is a kind of reliable performance of the intelligent parcel sorting device.【总页数】3页(P145-146,158)【作者】金兆东;孟祥斌;毛红艳;王德君【作者单位】沈阳工程学院自动化学院,辽宁沈阳 110136;沈阳工程学院自动化学院,辽宁沈阳 110136;沈阳工程学院自动化学院,辽宁沈阳 110136;沈阳工程学院自动化学院,辽宁沈阳 110136【正文语种】中文【中图分类】TP273【相关文献】1.基于STM32控制器的智能黑板擦系统设计 [J], 吕晓彬;王志凌;梁贵龙;魏灵峰2.基于STM32的机械手臂控制系统设计 [J], 钟晓青;林智;和青芳3.基于STM32F103控制器的智能循迹小车系统设计 [J], 万兵;汪地;史烨桦4.基于STM32F103 ARM芯片的智能吸尘器控制系统设计 [J], 卢运5.基于STM32的脉冲激光器智能控制系统设计 [J], 苏锐;郭欢;范一松;彭方;郭强因版权原因,仅展示原文概要,查看原文内容请购买。
机器人测控技术大作业课程设计课程设计名称:基于STM32的机械臂运动控制分析设计专业班级:自动1302学生姓名:张鹏涛学号:201323020219指导教师:曹毅课程设计时间:2016-4-28~2016-5-16指导教师意见:成绩:签名:年月日目录摘要.............................................................................................................................. I V第一章运动模型建立 (V)1.1引言 (V)1.2机器人运动学模型的建立 (V)1.2.1运动学正解 (VII)第二章机械臂控制系统的总体方案设计 (VIII)2.1机械臂的机械结构设计 (VIII)2.1.1臂部结构设计原则 (VIII)2.1.2机械臂自由度的确定..................................................................... I X2.2机械臂关节控制的总体方案...................................................................... I X2.2.1机械臂控制器类型的确定............................................................. I X2.2.2机械臂控制系统结构 (X)2.2.3关节控制系统的控制策略 (X)第三章机械臂控制系统硬件设计............................................................................ X I3.1机械臂控制系统概述.................................................................................. X I3.2微处理器选型 (XII)3.3主控制模块设计 (XII)3.3.1电源电路 (XII)3.3.2复位电路 (XIII)3.3.3时钟电路 (XIII)3.3.4 JTAG调试电路 ........................................................................... X IV3.4驱动模块设计 (XV)3.5电源模块设计........................................................................................... X VI 第四章机械臂控制系统软件设计 (XVII)4.1初始化模块设计 (XVII)4.1.1系统时钟控制 (XVII)4.1.2 SysTick定时器 (XVIII)4.1.3 TIM定时器 ................................................................................. X IX4.1.4通用输入输出接口GPIO (XX)4.1.5超声波传感器模块 (XX)总结 (XXII)参考文献 (XXIII)附录A (XXIV)附录B (XXV)设计要求:设计一个两连杆机械臂,具体参数自行设计,建立其运动学模型,然后在此基础上完成该机械臂两点间的路径规划,并给出仿真结果。
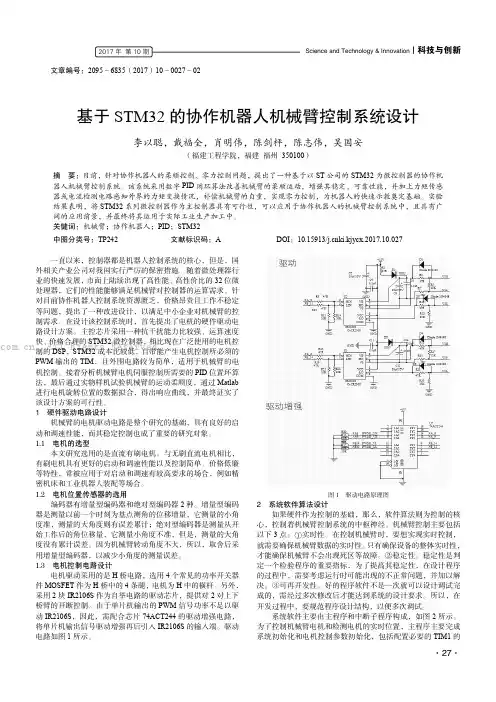
Science and Technology &Innovation ┃科技与创新·27·2017年第10期文章编号:2095-6835(2017)10-0027-02基于STM32的协作机器人机械臂控制系统设计李以聪,戴福全,肖明伟,陈剑枰,陈志伟,吴国安(福建工程学院,福建福州350100)摘要:目前,针对协作机器人的柔顺控制、零力控制问题,提出了一种基于以ST 公司的STM32为微控制器的协作机器人机械臂控制系统。
该系统采用数字PID 闭环算法改善机械臂的柔顺运动,增强其稳定、可靠性能,并加上力矩传感器或电流检测电路感知外界的力矩变换情况,补偿机械臂的自重,实现零力控制,为机器人的快速示教奠定基础。
实验结果表明,将STM32系列微控制器作为主控制器具有可行性,可以应用于协作机器人的机械臂控制系统中,且具有广阔的应用前景,并最终将其运用于实际工业生产加工中。
关键词:机械臂;协作机器人;PID ;STM32中图分类号:TP242文献标识码:ADOI :10.15913/ki.kjycx.2017.10.027一直以来,控制器都是机器人控制系统的核心,但是,国外相关产业公司对我国实行严厉的保密措施。
随着微处理器行业的快速发展,市面上陆续出现了高性能、高性价比的32位微处理器,它们的性能能够满足机械臂对控制器的运算需求。
针对目前协作机器人控制系统资源匮乏,价格昂贵且工作不稳定等问题,提出了一种改进设计,以满足中小企业对机械臂的控制需求。
在设计该控制系统时,首先提出了电机的硬件驱动电路设计方案。
主控芯片采用一种抗干扰能力比较强、运算速度快、价格合理的STM32微控制器,相比现在广泛使用的电机控制的DSP ,STM32成本比较低,自带能产生电机控制所必须的PWM 输出的TIM ,且外围电路较为简单,适用于机械臂的电机控制。
接着分析机械臂电机伺服控制所需要的PID 位置环算法,最后通过实物样机试验机械臂的运动柔顺度,通过Matlab 进行电机旋转位置的数据拟合,得出响应曲线,并最终证实了该设计方案的可行性。
机器人测控技术大作业课程设计课程设计名称:基于STM32的机械臂运动控制分析设计专业班级:自动1302学生姓名:张鹏涛学号: 2指导教师:曹毅课程设计时间: 2016-4-28~2016-5-16目录摘要 (III)第一章运动模型建立................................................................................................ I V1、1引言......................................................................................................... I V1、2机器人运动学模型的建立....................................................................... I V1、2、1运动学正解............................................................................... V I 第二章机械臂控制系统的总体方案设计.. (VII)2、1机械臂的机械结构设计 (VII)2、1、1臂部结构设计原则 (VII)2、1、2机械臂自由度的确定 (VIII)2、2机械臂关节控制的总体方案 (VIII)2、2、1机械臂控制器类型的确定 (VIII)2、2、2机械臂控制系统结构............................................................... I X2、2、3关节控制系统的控制策略....................................................... I X 第三章机械臂控制系统硬件设计.. (X)3、1机械臂控制系统概述 (X)3、2微处理器选型 (X)3、3主控制模块设计....................................................................................... X I3、3、1电源电路................................................................................... X I3、3、2复位电路 (XII)3、3、3时钟电路 (XII)3、3、4 JTAG调试电路 (XIII)3、4驱动模块设计 (XIII)3、5电源模块设计........................................................................................ X IV 第四章机械臂控制系统软件设计......................................................................... X VI4、1初始化模块设计.................................................................................... X VI4、1、1系统时钟控制........................................................................ X VI4、1、2 SysTick定时器 (XVII)4、1、3 TIM定时器 (XVIII)4、1、4通用输入输出接口GPIO ..................................................... X IX4、1、5超声波传感器模块................................................................ X IX 总结. (XX)参考文献................................................................................................................... X XI 附录A . (XXII)附录B (XXIII)设计要求:设计一个两连杆机械臂,具体参数自行设计,建立其运动学模型,然后在此基础上完成该机械臂两点间的路径规划,并给出仿真结果。
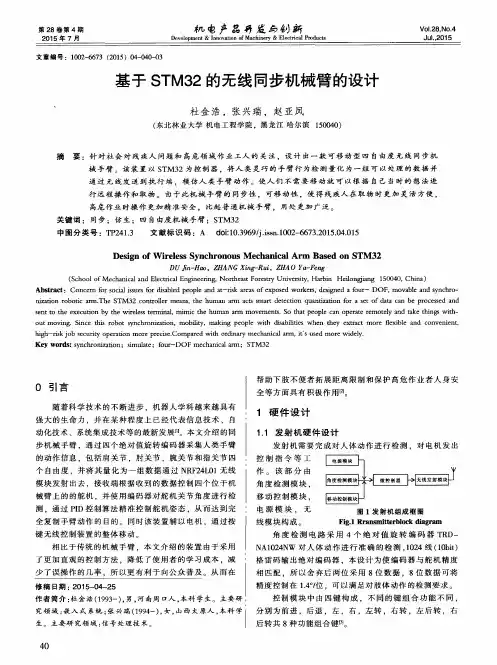
井冈山大学学报(自然科学版) 73 文章编号:1674-8085(2019)01-0073-05基于STM32的机械臂运动控制系统设计研究*刘磊1,余汾芬2(1. 安庆职业技术学院,安徽,安庆246003;2.安庆医药高等专科学校,安徽,安庆246052)摘要:为了提高机械臂运动的准确性以及提高机械臂的控制效率,运用STM32处理器设计了一种机械臂运动控制系统。
采用STM32作为主控系统的核心,通过角度位移传感器构成机械臂的感知模块,利用舵机驱动电路构成机械臂的运动模块,从而形成机械臂运动控制系统的硬件单元。
以模糊PID控制理论为软件核心,对机械臂运动过程中的轨迹偏差进行计算,形成控制量。
主控器STM32将根据控制量对机械臂的运动模块发出调控信号,使得机械臂能够快速回归预定的运动轨迹。
实验结果表明,本文所设计的机械臂运动控制系统,能够快速、准确地对机械臂的运动状态进行控制,提高机械臂运动的准确性。
关键词:机械臂;运动控制;STM32;角度位移传感器;模糊PID控制理论;运动轨迹中图分类号:TP391 文献标识码:A DOI:10.3969/j.issn.1674-8085.2019.01.015 RESEARCH ON THE DESIGN OF MANIPULATOR MOTION CONTROLSYSTEM BASED ON STM32*LIU Lei1,YU Fen-fen2(1. Anqing V ocational & Technical College, Anqing, Anhui 246003, China; 2. Anqing Medical College, Anqing, Anhui 246052, China)Abstract:To improve the accuracy of the manipulator motion and the control efficiency of the manipulator, a manipulator motion control system is designed by using STM32 processor.STM32 is used as the core of the main control system. The perception module of the manipulator is composed of angular displacement sensor, and the motion module of the manipulator is composed of the steering motor driving circuit. They form the hardware unit of the manipulator motion control system.Taking the theory of fuzzy PID control as the software core, the trajectory deviation of the manipulator is calculated to form the control quantity.The main controller STM32 will send the control signal to the motion module of the manipulator according to the control quantity, so that the manipulator can quickly return to the predetermined trajectory.The experimental results show that the motion control system of the manipulator designed in this paper can quickly and accurately control the motion state of the manipulator, which can improve the accuracy of the motion of the manipulator.Key words:manipulator; motion control; stm32; displacement sensor; fuzzy pid control theory; motion trajector0 引言机械臂是一种模拟人体手臂的机器[1]。
基于STM32的机械臂运动控制与结构设计开题报告班级(学号):机械1104(2011010093)姓名:文伟松指导教师:王科社选题背景机器人技术是一种新兴技术,它涉及多种学科,综合了计算机、机械学、信号处理和传感技术、控制论、仿生学和人工智能等多学科。
机器人按照用途可分为工业机器人、服务机器人和特种机器人,其中工业机器人是目前应用最多、技术上发展最成熟的一种机器人。
随着我国经济的快速发展和科学技术的突飞猛进,使得机器人在货物搬运与物流、喷涂、焊接、测量等行业有着相当广泛的应用。
码垛机器人是实现物流和包装自动化的关键装备,可以实现高速、自动、连续、准确的码垛操任务。
人工码垛是强度大、重复性高的劳动,特别是高粉尘、有毒、有害等物料,基本不适合人工码垛,因此有必要研发一种码垛机器人,减低生产过程中对工人身心伤害。
进入 20 世纪 80 年代,随着计算机技术、控制技术以及自动化技术的发展和成熟,工业发达国家如日本、美国、瑞典、意大利、德国等都在相应的研制出了自己的码垛机器人。
如德国的 KUKA 系列,日本的 FANUC 系列,瑞典的 ABB 系列等。
国外发达国家研制的码垛机器人多为四轴空间的关节机器人,一般由机械本体、拉制器和末端执行机构组成,其中机械本都是有底座,腰部连杆,大小臂连杆和末端执行器(腕部)构成。
如图 1.1。
德国KUKA 瑞典ABB机器人日本不二(FUJI)日本OKURA图1.1 发达国家研制的主要工业机器人基于串联式码垛机器人,本文设计一种类似结构的机械臂。
针对毕业论文题目“基于STM32的机械臂运动控制与结构设计”,首先对国内外高校,研究院,企业等对码垛机器人研究及其发展状况进行调研;其次对设计的机械臂作运动学分析以及控制系统设计等。
1.1.1主要研究内容本文针对串联关节型码垛机器人,设计了一种新型4DOF机械臂;此机械臂主要连杆机构与串联关节型码垛机器人类似;在不大幅度增加系统转动惯量前提下,增加一个自由度实现末端执行器翻转,改进末端视觉传感器测量角度和带宽。
机器人测控技术大作业课程设计课程设计名称:基于STM32的机械臂运动控制分析设计专业班级:自动1302学生姓名:张鹏涛学号:201323020219指导教师:曹毅课程设计时间:2016-4-28~2016-5-16目录摘要 (IV)第一章运动模型建立 (V)1.1引言 (V)1.2机器人运动学模型的建立 (V)1.2.1运动学正解 ............................................................... V II 第二章机械臂控制系统的总体方案设计 ............................................... V III2.1机械臂的机械结构设计 ......................................................... V III2.1.1臂部结构设计原则..................................................... V III2.1.2机械臂自由度的确定.................................................... I X2.2机械臂关节控制的总体方案 (X)2.2.1机械臂控制器类型的确定 (X)2.2.2机械臂控制系统结构.................................................... X I2.2.3关节控制系统的控制策略 ............................................. X I 第三章机械臂控制系统硬件设计.......................................................... X II3.1机械臂控制系统概述 ............................................................. X II3.2微处理器选型...................................................................... X III3.3主控制模块设计................................................................... X III3.3.1电源电路 ................................................................. X IV3.3.2复位电路 ................................................................. X IV3.3.3时钟电路 ................................................................. X IV3.3.4 JTAG调试电路......................................................... X V3.4驱动模块设计....................................................................... X V3.5电源模块设计..................................................................... X VII 第四章机械臂控制系统软件设计 (XVIII)4.1初始化模块设计 (XVIII)4.1.1系统时钟控制 (XVIII)4.1.2 SysTick定时器......................................................... X X4.1.3 TIM定时器.............................................................. X XI4.1.4通用输入输出接口GPIO (XXII)4.1.5超声波传感器模块 (XXII)总结 (XXIV)参考文献 (XXV)附录A (XXVI)附录B (XXVII)设计要求:设计一个两连杆机械臂,具体参数自行设计,建立其运动学模型,然后在此基础上完成该机械臂两点间的路径规划,并给出仿真结果。
基于 STM32 的运动控制器设计随着工业自动化的不断发展,越来越多的机器设备需要使用运动控制器来实现精密控制和稳定运行。
而基于STM32的运动控制器因其低功耗、高性能和强大的功能而备受关注。
本文将探讨基于STM32的运动控制器设计。
一、STM32概述STM32是一款由意法半导体推出的32位ARM Cortex-M系列微控制器,其具有低功耗、高性能和丰富的外设资源等特点,被广泛应用于工业、汽车、医疗、航天航空和消费电子等行业。
STM32除了具有硬件性能强大的特点外,其软件开发也非常便捷,支持多种开发工具和多种开发语言,如C、C++和汇编语言等。
二、运动控制器概述运动控制器是一种能够对各种运动进行精密控制的设备,包括电机、伺服控制以及各种位置和速度控制等。
在现代自动化领域中,运动控制器被广泛应用于各种机器设备中,以保证其稳定运行和精确控制。
三、基于STM32的运动控制器设计基于STM32的运动控制器设计通常需要包括以下几个方面:(一) 硬件设计方面硬件设计方面主要包括电路设计和PCB设计两个部分。
在电路设计方面,需要根据实际需要选择不同的外设资源,例如AD/DA转换器、PWM模块等,将其与STM32微控制器相连接,实现控制目标设备的需求。
在PCB设计方面,需要根据电路设计原理图和PCB设计规范进行各种封装和布线操作,最终将设备制成PCB板供后续生产和使用。
(二) 软件设计方面软件设计方面主要包括应用程序设计和调试两个部分。
需要编写C/C++代码,通过STM32的开发平台和工具链实现基于STM32的运动控制器。
在调试方面需要使用STM32开发板进行验证,优化和验证控制器的效果和性能。
(三) 性能和效果测试方面测试性能和效果是评估基于STM32的运动控制器是否能够达到预期效果的重要步骤。
可以通过连接实际运动设备,以及利用专业的测试工具和软件来测试控制器的性能,如稳定性、速度精度的能力等。
四、基于STM32的运动控制器的优势基于STM32的运动控制器具有如下优势:(一) 性能优异:STM32微控制器采用最先进的ARM Cortex-M系列结构和D-Cache技术,在提高性能的同时降低能耗。
基于STM32的运动控制器设计指导教师梁维源摘要运动控制器是现在社会的主流发展,不管是现在还是将来都会有重要的运用。
本文运用STM32输出PWM波对电机进行控制使他们能分别沿着X轴和Y轴以及Z轴移动,STM32发送指令,由TB6560驱动芯片驱动进电机,在图纸上实现绘画,定位,转孔。
选用STM32芯片作为控制核心,通过控制步进电机来控制机器臂,带动X轴和Y轴以及Z轴进行平面画图。
该运动控制器具有精度高、操作方便、速度快、低成本等特点。
关键词:运动控制器;STM32;步进电机;TB6560Based on the STM32 motion controller designElectronic information engineering specialty level 2011 jiang shijianSupervisor Liang WeiyuanAbstractThe motion controller is now the mainstream of the development of society, both now and in the future will have important applications. Great defense and industrial applications as well as in life. In this paper, the output PWM wave STM32 motor control so that they can along the X-axis and Y-axis and Z-axis movement, STM32 send commands respectively, driven by a stepping motor driver chip TB6560 realize painting, positioning, turn the hole in the drawings. The program makes the selection STM32 chip stepper motor control system by controlling the stepper motor to control the robotic arm from the drive to the X and Y and Z axis plane drawing. The motion controller with high precision, easy operation, fast, low cost. Has great development prospects.Keywords: Movement Control System, STM32,Stepping motor, TB6560目录前言 (1)第一章运动控制器的总设计方案 (1)第二章运动电路控制器三维平台设计 (3)2.1硬件设计框图 (3)2.2运动电路控制控制电路图 (3)2.3运动控制器机械运动电路图 (4)第三章运动控制器的硬件设计 (4)3.1 步进电机 (4)3.1.1主要构造 (4)3.1.2步进电机分类 (5)3.1.3步进电机工作原理 (5)3.1.4步进电机的特点 (6)3.1.5步进电机的控制方法 (6)3.2 STM32F103VET6 (7)3.2.1 STM32F103VET6最小系统 (7)3.3.2 STM32F103VET6定时器 (8)3.3.2.1基本定时器 (9)3.3.2.2通用定时器 (9)3.3.3.3 高级定时器 (10)3.3 TB6560步进电机驱动器 (11)3.3.1 TB6560步进电机驱动模块 (11)3.3.2 TB6560步进电机驱动器特点 (13)3.3.3 TB6560步进电机驱动器功能 (13)第四章运动控制器的软件设计 (13)4.1PWM概述 (14)4.1.1 PWM简介 (14)4.1.2 PWM实现 (14)4.2.设计要求 (15)4.3 程序的配置 (16)4.3.1.PWM波输出的配置 (16)4.3.2 绘图控制程序的配置 (18)总结 (19)致谢 (20)参考文献 (20)附录程序代码 (21)前言自从运动控制器诞生以来,它不仅推动了社会的发展,也推动了新的技术革新。