松下伺服接线图
- 格式:doc
- 大小:3.40 MB
- 文档页数:20
松下伺服全知道——实战篇
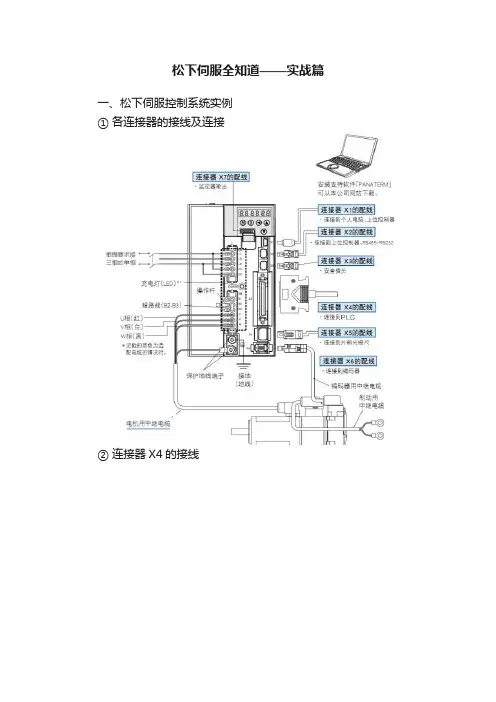
一、松下伺服控制系统实例
① 各连接器的接线及连接
② 连接器X4的接线
③ 驱动器与PLC的连接
④ 参数设置:
Pr0.01=0;Pr0.00=1;Pr0.07=3;Pr0.08=10000;Pr5.04=1 ⑤PLC程序的编制
回原点指令
相对定位(电机正反转)
绝对定位(D200、D202为触摸屏输入,无触摸屏时可直接指定,如K5000)
**********************************************************
二、台达伺服控制系统实例
某企业自动折弯设备,每次送料一定长度,采用伺服电机(台达)控制送料长度。
1)电路图:
2)控制柜
控制柜中的服驱动器
3)参数设置:
P1-00=2;P1-01=000;P1-31=0;P1-44=1;P1-45=1;
4)PLC程序编制
定位控制程序松下伺服和台达伺服完全一样,因为控制的PLC都是三菱的,在此省略。
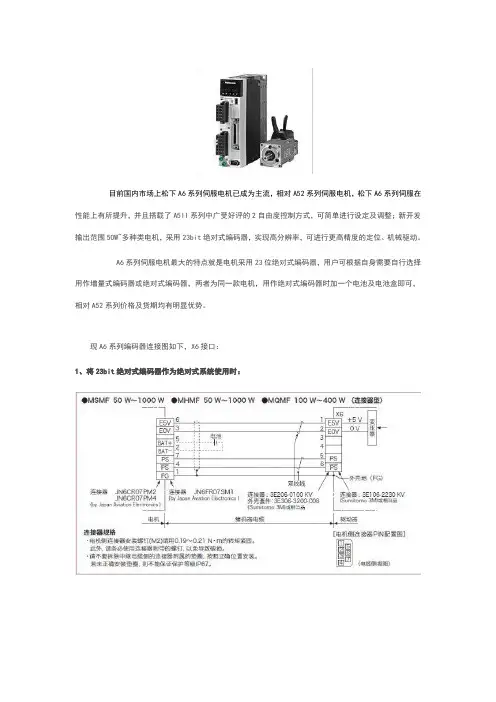
目前国内市场上松下A6系列伺服电机已成为主流,相对A52系列伺服电机,松下A6系列伺服在性能上有所提升,并且搭载了A5II系列中广受好评的2自由度控制方式,可简单进行设定及调整;新开发输出范围50W~多种类电机,采用23bit绝对式编码器,实现高分辨率,可进行更高精度的定位、机械驱动。
A6系列伺服电机最大的特点就是电机采用23位绝对式编码器,用户可根据自身需要自行选择用作增量式编码器或绝对式编码器,两者为同一款电机,用作绝对式编码器时加一个电池及电池盒即可,相对A52系列价格及货期均有明显优势。
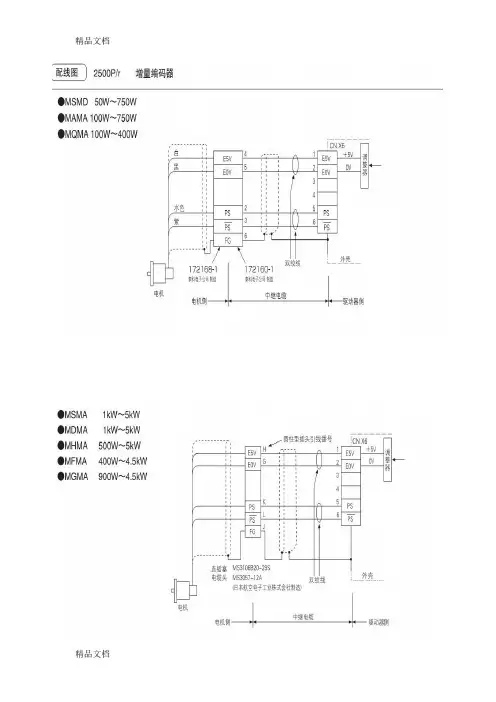
现A6系列编码器连接图如下,X6接口:
1、将23bit绝对式编码器作为绝对式系统使用时:
2、将23bit绝对式编码器作为增量式系统使用时:。

目前国内市场上松下A6系列伺服电机已成为主流,相对A52系列伺服电机,松下A6系列伺服在性能上有所提升,并且搭载了A5II系列中广受好评的2自由度控制方式,可简单进行设定及调整;新开发输出范围50W~5.0KW多种类电机,采用23bit绝对式编码器,实现高分辨率,可进行更高精度的定位、机械驱动。
A6系列伺服电机最大的特点就是电机采用23位绝对式编码器,用户可根据自身需要自行选择用作增量式编码器或绝对式编码器,两者为同一款电机,用作绝对式编码器时加一个电池及电池盒即可,相对A52系列价格及货期均有明显优势。
现A6系列编码器连接图如下,X6接口:
1、将23bit绝对式编码器作为绝对式系统使用时:
2、将23bit绝对式编码器作为增量式系统使用时:。
Panasonic松下数字交流伺服 安装调试说明书 (2003.11版本) 目 录 1. 松下连接示意图 2. 通电前的检查 3. 通电时的检查 4. 松下伺服驱动器的参数设定 5. 松下伺服驱动器的参数和性能优化调整 1. 松下连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在松下的保修范围!) 2. 通电前的检查 1) 确认松下伺服驱动器和电机插头的连接,相序是否正确: A.中惯量电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 注: 电机相序错误,通电时会发生电机抖动现象。
B.中惯量电机MDMA 0.75KW-2.5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U F V I W B 接地 D 刹车电源 G 刹车电源 H C. 中惯量电机MDMA 3KW-5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U D V E W F 接地 G 刹车电源 A 刹车电源 B 2)确认松下伺服驱动器CN SIG和松下伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认松下伺服驱动器CN I/F和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V范围内。
4.松下伺服驱动器的参数设定 1)松下伺服驱动器修改参数的操作方法 A. 接通驱动器电源; B. 按操作面板上的“SET”键; C. 按住“MODE”键,选择参数页面 PR _ 00 ; D. 用上○∧,下○∨按钮,选择你需要修改参数的参数号码 PR _ 42 (例修改42号参数); E. 按“SET”键,显示原来的参数值 00; F. 用左○<,上○∧,下○∨按钮,改变参数值; G. 修改完毕, 按“SET”键确定。
松下伺服A6系列编码器接线定义
目前国内市场上松下A6系列伺服电机已成为主流,相对A52系列伺服电机,松下A6系列伺服在性能上有所提升,并且搭载了A5II系列中广受好评的2自由度控制方式,可简单进行设定及调整;新开发输出范围50W~5.0KW多种类电机,采用23bit绝对式编码器,实现高分辨率,可进行更高精度的定位、机械驱动。
A6系列伺服电机最大的特点就是电机采用23位绝对式编码器,用户可根据自身需要自行选择用作增量式编码器或绝对式编码器,两者为同一款电机,用作绝对式编码器时加一个电池及电池盒即可,相对A52系列价格及货期均有明显优势。
现A6系列编码器连接图如下,X6接口:
1、将23bit绝对式编码器作为绝对式系统使用时:
2、将23bit绝对式编码器作为增量式系统使用时:。

目前国内市场上松下A6系列伺服电机已成为主流,相对A52系列伺服电机,松下A6系列伺服在性能上有所提升,并且搭载了A5II系列中广受好评的2自由度控制方式,可简单进行设定及调整;新开发输出范围50W~5.0KW多种类电机,采用23bit绝对式编码器,实现高分辨率,可进行更高精度的定位、机械驱动。
A6系列伺服电机最大的特点就是电机采用23位绝对式编码器,用户可根据自身需要自行选择用作增量式编码器或绝对式编码器,两者为同一款电机,用作绝对式编码器时加一个电池及电池盒即可,相对A52系列价格及货期均有明显优势。
现A6系列编码器连接图如下,X6接口:
1、将23bit绝对式编码器作为绝对式系统使用时:
2、将23bit绝对式编码器作为增量式系统使用时:。
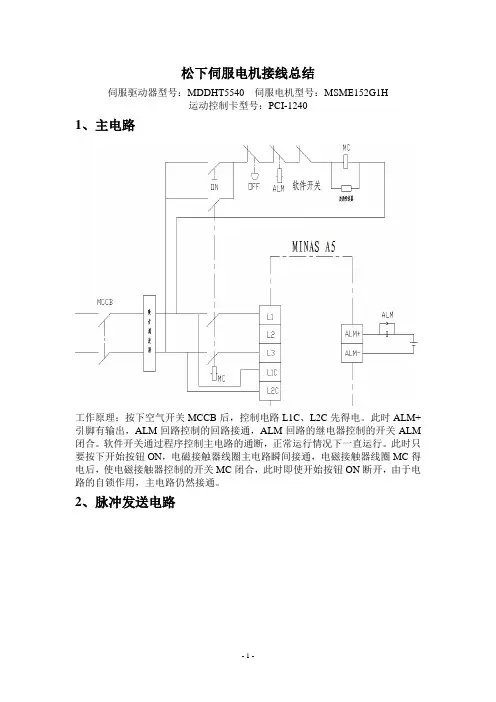
松下伺服电机接线总结伺服驱动器型号:MDDHT5540 伺服电机型号:MSME152G1H运动控制卡型号:PCI-12401、主电路工作原理:按下空气开关MCCB后,控制电路L1C、L2C先得电。
此时ALM+引脚有输出,ALM回路控制的回路接通,ALM回路的继电器控制的开关ALM 闭合。
软件开关通过程序控制主电路的通断,正常运行情况下一直运行。
此时只要按下开始按钮ON,电磁接触器线圈主电路瞬间接通,电磁接触器线圈MC得电后,使电磁接触器控制的开关MC闭合,此时即使开始按钮ON断开,由于电路的自锁作用,主电路仍然接通。
2、脉冲发送电路接线根据:运动控制卡PCI-1240给出的控制卡功能模块图如下图所示由图可知,运动控制卡输出脉冲的方式为长线驱动方式。
松电机下伺服使用手册中P3-35(P151)中提到长线驱动接线端子说明如下图手册P3-18(P134)给出的长线驱动接线方法如下图3、编码器反馈脉冲接收电路接线原理:关于利用伺服驱动器输出的ABZ相脉冲计算伺服电机的旋转角度(参考网址:/Details/200810/2008103112034200001-1.shtml)推荐做法:先将OA、OB脉冲四倍频(类似于DSP的QEP计数模块),具体实现的时候只需要记住OA、OB的每个脉冲跳变即可实现四倍频,同时要辩相,一般我们定义OA超前OB为电机旋转正方向,此时脉冲累加,否则为负方向,脉冲累减。
知道了脉冲个数就好办了,如果松下伺服输出的脉冲个数为一圈2500个,由于我们四倍频了,故实际到我们这里就应该是10000个没圈,根据这个脉冲你就可以知道电机的相对位置。
根据OC信号,你可以知道电机的绝对位置,一般定义OC出现的时刻就是电机转子的零位,因此每次检测到OC出现,就应该认为绝对位置出现,这样可以清除累积误差。
根据收到的脉冲数,采用M法测速也可以计算出实际电机的转速。
接线根据:伺服驱动器说明书P3-32(P148)给出的接线说明由此说明可知,必须使用长线接收器接收伺服驱动器编码器反馈的脉冲,且需加入终端电阻。
松下伺服电机接线总结伺服驱动器型号:MDDHT5540 伺服电机型号:MSME152G1H运动控制卡型号:PCI-12401、主电路工作原理:按下空气开关MCCB后,控制电路L1C、L2C先得电。
此时ALM+引脚有输出,ALM回路控制的回路接通,ALM回路的继电器控制的开关ALM 闭合。
软件开关通过程序控制主电路的通断,正常运行情况下一直运行。
此时只要按下开始按钮ON,电磁接触器线圈主电路瞬间接通,电磁接触器线圈MC得电后,使电磁接触器控制的开关MC闭合,此时即使开始按钮ON断开,由于电路的自锁作用,主电路仍然接通。
2、脉冲发送电路接线根据:运动控制卡PCI-1240给出的控制卡功能模块图如下图所示由图可知,运动控制卡输出脉冲的方式为长线驱动方式。
松电机下伺服使用手册中P3-35(P151)中提到长线驱动接线端子说明如下图手册P3-18(P134)给出的长线驱动接线方法如下图3、编码器反馈脉冲接收电路接线原理:关于利用伺服驱动器输出的ABZ相脉冲计算伺服电机的旋转角度(参考网址:/Details/200810/2008103112034200001-1.shtml)推荐做法:先将OA、OB脉冲四倍频(类似于DSP的QEP计数模块),具体实现的时候只需要记住OA、OB的每个脉冲跳变即可实现四倍频,同时要辩相,一般我们定义OA超前OB为电机旋转正方向,此时脉冲累加,否则为负方向,脉冲累减。
知道了脉冲个数就好办了,如果松下伺服输出的脉冲个数为一圈2500个,由于我们四倍频了,故实际到我们这里就应该是10000个没圈,根据这个脉冲你就可以知道电机的相对位置。
根据OC信号,你可以知道电机的绝对位置,一般定义OC出现的时刻就是电机转子的零位,因此每次检测到OC出现,就应该认为绝对位置出现,这样可以清除累积误差。
根据收到的脉冲数,采用M法测速也可以计算出实际电机的转速。
接线根据:伺服驱动器说明书P3-32(P148)给出的接线说明由此说明可知,必须使用长线接收器接收伺服驱动器编码器反馈的脉冲,且需加入终端电阻。
FX2N10PG与松下伺服技术资料(PLC类型FX3U)一、松下伺服介绍(末页附通讯电缆接脚图)二、FX2n 10PG与松下伺服接线图三、PLC程式一、松下伺服介绍(位置控制模式。
)此次做示范的马达和控制器型号如下:马达(200W) MSMD022P1U控制器 MADDT1207马达和控制器接线可简略接为:需注意:SRV-ON信号为电平信号,回原点、正反转及定位时需要一直ON。
(一)控制器与马达接线1、连接到电源端子的连线电源端子连线如上图。
实验中控制电源L1C、L3C分别与L1、L3短接接到交流200V。
RB2和RB3短路连接。
通常情况下RB2和RB3短路连接,但发生再生放电电阻电阻过载报警(Err18)导致驱动器故障时,请将RB2和RB3断开,然后在RB1和RB3联入制动电阻,联入制动电阻后请将Pr6C设置0以外的值。
需注意,马达三相U、V、W需一一对应接到控制器连马达电源端,不可接错,接错可能发生故障:空载时过载报警(Err16),还表现为发热量大。
2、I/O接线I/O电路为NPN型,输入为低电平有效。
此控制器有两路脉冲输入端:普通的光耦输入电路和差分输入专用电路。
可通过参数Pr40进行选择。
需注意,默认0为通过光耦输入端输入,改为1后为通过差分输入专用电路输入。
下面就上图中普通的光耦输入电路和差分输入专用电路做说明。
普通的光耦输入电路有三种接线形式,此次用的方式2。
需注意,方式(2)和方式(3)区别在于:方式(2)的端子3和端子5外接电源为5V;方式(3)的端子1和端子2外接电源为24V。
以三菱FX1S系列PLC为例,此种接线方式程式中需用到PLSV指令实现正反转、DRVA指令实现绝对位置控制、DRVI指令实现相对位置控制。
如:以上程式实现电机以30KHz的频率正反转。
该程式实现以7KHz频率为速度绝对位置移动到15000pls的位置。
移动前需回原点。
该程式实现M3闭合后以7KHz频率为速度相对位置移动到15000pls的位置;M4闭合后以7KHz频率为速度相对位置移动到-15000pls的位置。
松下伺服系统基本接线及常见问题解决方法一、基本接线主电源输入采用~220V,从L1、L3接入(实际使用应参照操作手册);控制电源输入r、t也可直接接~220V;电机接线见操作手册第22、23页,编码器接线见操作手册第24~26页,切勿接错。
二、试机步骤1.JOG试机功能仅按基本接线就可试机;在数码显示为初始状态‘r 0’下,按‘SET’键,然后连续按‘MODE’键直至数码显示为‘AF-AcL’,然后按上、下键至‘AF-JoG’;按‘SET’键,显示‘JoG -’:按住‘^’键直至显示‘rEAdy’;按住‘’键直至显示‘SrV-on’;按住‘^’键电机反时针旋转,按‘V’电机顺时针旋转,其转速可由参数Pr57设定。
按‘SET’键结束。
2.内部速度控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;参数No.53、No.05设置为1:(注此类参数修改后应写入EEPROM,并重新上电)调节参数No.53,即可使电机转动。
参数值即为转速,正值反时针旋转,负值顺时针旋转。
3.位置控制方式COM+(7脚)接+12~24VDC,COM-(41脚)接该直流电源地;SRV-ON(29脚)接COM-;PLUS1(3脚)、SIGN1(5脚)接脉冲源的电源正极(+5V);PLUS2(4脚)接脉冲信号,SIGN(6脚)接方向信号;参数No.02设置为0,No42设置为3,No43设置为1;PLUS(4脚)送入脉冲信号,即可使电机转动;改变SIGN2即可改变电机转向。
另外,调整参数No.46、No.4B,可改变电机每转所需的脉冲数(即电子齿轮)。
MBDDT2210003电机,MBDDT2210003电机常见问题解决方法:1.松下数字式交流伺服系统MHMA 2KW,试机时一上电,电机就振动并有很大的噪声,然后驱动器出现16号报警,该怎么解决?咨询温小姐;张先生182==019==88=309 或150 -266-48-109 技术产品资料和选型请加q; 8788--56087,价格优惠,质量保证,货源充足。