矢量的基本代数运算
- 格式:doc
- 大小:433.00 KB
- 文档页数:10
向量的加法满足平行四边形法则和三角形法则。
向量的加法OB+OA=OC。
a+b=(x+x',y+y')。
a+0=0+a=a。
向量加法的运算律:交换律:a+b=b+a;结合律:(a+b)+c=a+(b+c)。
向量的减法:如果a、b是互为相反的向量,那么a=-b,b=-a,a+b=0. 0的反向量为0。
向量是什么意思在数学中,向量(也称为欧几里得向量、几何向量、矢量),指具有大小(magnitude)和方向的量。
它可以形象化地表示为带箭头的线段。
箭头所指:代表向量的方向;线段长度:代表向量的大小。
与向量对应的量叫做数量(物理学中称标量),数量(或标量)只有大小,没有方向。
向量的记法:印刷体记作黑体(粗体)的字母(如a、b、u、v),书写时在字母顶上加一小箭头“→”。
如果给定向量的起点(A)和终点(B),可将向量记作AB(并于顶上加→)。
在空间直角坐标系中,也能把向量以数对形式表示,例如xOy平面中(2,3)是一向量。
在物理学和工程学中,几何向量更常被称为矢量。
许多物理量都是矢量,比如一个物体的位移,球撞向墙而对其施加的力等等。
与之相对的是标量,即只有大小而没有方向的量。
一些与向量有关的定义亦与物理概念有密切的联系,例如向量势对应于物理中的势能。
几何向量的概念在线性代数中经由抽象化,得到更一般的向量概念。
此处向量定义为向量空间的元素,要注意这些抽象意义上的向量不一定以数对表示,大小和方向的概念亦不一定适用。
因此,平日阅读时需按照语境来区分文中所说的"向量"是哪一种概念。
不过,依然可以找出一个向量空间的基来设置坐标系,也可以透过选取恰当的定义,在向量空间上介定范数和内积,这允许我们把抽象意义上的向量类比为具体的几何向量。
向量代数的基本公式向量代数是数学中的一个分支,主要研究在向量空间中向量的代数运算及其相关性质。
向量代数中包括很多基本公式,这些公式不仅是向量代数研究中的重要内容,也是我们日常生活中常常用到的数学工具。
在这篇文章中,我们将介绍向量代数中的一些基本公式及其重要性。
1. 向量加法的基本公式向量加法是向量代数中最基本的运算之一,它表达了两个向量相加的结果。
对于任意两个向量a和b,它们的和向量c可以表示为:c = a + b该公式意味着,当我们把向量a和向量b相加时,向量c的大小和方向取决于a和b的大小和方向。
这个公式在计算中非常实用,因为在求解向量问题时,通常需要将多个向量相加或相减。
2. 向量数量积的基本公式向量数量积指的是两个向量的标量积,也称为点积。
对于向量a和向量b,它们的数量积可以表示为:a·b = |a||b|cosθ其中,|a|和|b|分别表示向量a和b的模长,θ表示它们之间的夹角,cosθ表示它们之间的夹角的余弦值。
该公式的意义在于,它为我们提供了两个向量之间的度量方法。
例如,我们可以使用该公式计算两个向量之间的夹角,也可以计算出它们之间的投影等。
3. 向量矢量积的基本公式向量矢量积指的是两个向量的向量积,也称为叉积。
对于向量a和向量b,它们的向量积可以表示为:a×b = |a||b|sinθn其中,|a|和|b|分别表示向量a和b的模长,θ表示它们之间的夹角,n表示一个垂直于a和b所在平面的单位向量,sinθ表示它们之间夹角的正弦值。
该公式的重要性在于它可以用于计算平面区域、体积和方向向量等问题。
例如,在计算三角形面积时,我们可以利用向量积的大小。
此外,在物理学、工程学等领域中,向量积的应用也非常广泛。
4. 向量三角函数的基本公式向量三角函数指的是向量和角度之间的关系。
与传统的三角函数类似,向量三角函数包括正弦、余弦、正切等。
对于向量a和向量b,它们的三角函数可以表示为:sinθ = |a×b|/|a||b| cosθ = a·b/|a||b| tanθ = |a×b|/a·b其中,sinθ表示向量a和b的夹角的正弦值,cosθ表示它们之间的夹角的余弦值,tanθ表示它们之间的夹角的正切值。
矢量三角形法则矢量三角形法则是矢量运算中的一个重要原理,它描述了矢量之间的关系和运算规律。
矢量三角形法则是矢量代数的基础,它在物理学、工程学、数学等领域都有着广泛的应用。
矢量是具有大小和方向的量,它可以用箭头表示,箭头的长度表示矢量的大小,箭头的方向表示矢量的方向。
矢量之间的运算包括加法、减法、数量乘法等,而矢量三角形法则就是描述了矢量加法的规律。
矢量加法的规律可以用三角形法则来表示。
假设有两个矢量a 和b,它们的起点都在原点O处,终点分别为A和B。
那么a+b的矢量和就是从O到C的矢量,其中C是由A和B的终点构成的三角形的第三个顶点。
这个三角形就是矢量三角形,而矢量三角形法则就是描述了矢量和的大小和方向。
根据矢量三角形法则,矢量和的大小等于矢量a和b的大小的几何和,即|a+b| = |a| + |b|。
而矢量和的方向则是由矢量a和b 的方向决定的,具体来说,矢量和的方向是由矢量a和b的夹角决定的,如果夹角为锐角,那么矢量和的方向与矢量a和b的方向相同;如果夹角为钝角,那么矢量和的方向与矢量a和b的方向相反。
矢量三角形法则还可以推广到多个矢量的情况。
如果有多个矢量a1, a2, ..., an,它们的起点都在原点O处,终点分别为A1,A2, ..., An,那么这些矢量的和就是从O到P的矢量,其中P是由A1, A2, ..., An构成的多边形的重心。
这个多边形就是矢量多边形,而矢量多边形法则就是描述了多个矢量和的大小和方向。
根据矢量多边形法则,多个矢量的和的大小等于这些矢量的大小的几何和,即|a1+a2+...+an| = |a1| + |a2| + ... + |an|。
而多个矢量的和的方向则是由这些矢量的方向决定的,具体来说,多个矢量的和的方向是由这些矢量的夹角决定的,如果夹角为锐角,那么矢量和的方向与这些矢量的方向相同;如果夹角为钝角,那么矢量和的方向与这些矢量的方向相反。
矢量三角形法则和矢量多边形法则是矢量运算中的基本原理,它们描述了矢量之间的关系和运算规律,为矢量运算提供了重要的理论基础。
矢量的运算矢量是物理学中一个重要的概念,它具有大小和方向的特点。
在矢量运算中,我们经常会遇到加法、减法、数量乘法和点乘等运算。
本文将对这些矢量运算进行详细介绍。
1. 矢量加法矢量加法是指将两个矢量相加得到一个新的矢量。
在矢量加法中,两个矢量的大小和方向都要考虑。
如果两个矢量的方向相同,则它们的大小相加;如果方向相反,则它们的大小相减。
矢量加法可以用几何方法和代数方法进行计算。
几何方法中,我们可以将两个矢量的起点放在同一个点上,然后将它们的终点相连,所得的矢量就是它们的和矢量。
代数方法中,我们可以将矢量表示为坐标形式,然后将两个矢量的坐标分量相加得到和矢量的坐标分量。
2. 矢量减法矢量减法是指将一个矢量减去另一个矢量得到一个新的矢量。
在矢量减法中,我们要先确定两个矢量的方向,然后将它们的大小相减。
几何方法和代数方法也可以用于计算矢量减法。
几何方法中,我们可以将两个矢量的起点放在同一个点上,然后将第二个矢量的终点与第一个矢量的起点相连,所得的矢量就是它们的差矢量。
代数方法中,我们可以将矢量表示为坐标形式,然后将两个矢量的坐标分量相减得到差矢量的坐标分量。
3. 数量乘法数量乘法是指将一个矢量乘以一个实数得到一个新的矢量。
在数量乘法中,矢量的方向不变,只有大小发生改变。
当实数大于1时,矢量的大小会增加;当实数在0和1之间时,矢量的大小会减小;当实数小于0时,矢量的方向会反向。
数量乘法可以用几何方法和代数方法进行计算。
几何方法中,我们可以将矢量的起点放在原点上,然后将矢量的终点与实数乘积的点相连,所得的矢量就是它们的乘积矢量。
代数方法中,我们可以将矢量表示为坐标形式,然后将矢量的坐标分量与实数相乘得到乘积矢量的坐标分量。
4. 点乘点乘是指将两个矢量的对应分量相乘,并将结果相加得到一个标量。
点乘的结果是两个矢量之间的夹角的余弦值乘以两个矢量的大小的乘积。
点乘可以用几何方法和代数方法进行计算。
几何方法中,我们可以将两个矢量的起点放在同一个点上,然后将它们的终点相连,并计算夹角的余弦值乘以两个矢量的大小的乘积。
位移,速度,加速度,力等都是矢量,矢量的运算可不是简单的代数加减,而是满足三角形法则。
如图所示,某同学从A地到B地的位移为S1,从B地到C地的位移为S2,则总位移S--即前两段位移的和为从A指向C的有向线段AC---矢量相加的三角形法则。
若已知总位移S和第一段的位移S1,则第二段位移S2--即总位移与第一段位移S2的差为由B指向C的有向线段BC --矢量相减的三角形法则。
(减量指向被减量) 典型应用1.
解答:将力矢量F3平移至F4-F1,先将力矢量F3和F4相加,则和矢量恰为F1.如下图所示。
同理可知,力矢量F2和F5相加,则和矢量 也恰为F1.
所以这5个力的和矢量为3F,大小为30牛。
典型应用2.
如图所示,物体以速率v做匀速圆周运动,经时间t由A点运动到B点,AB之间恰为1/4圆弧。
物体在这段时间内的平均加速度多大?
解答:如下图所示,将物体在A点的速度矢量平移至B点,根据矢量相减的三角形定则可确定这段时间内的速度变化量,再根据加速的定义式可确定这段时间内的平均加速度大小。
看来,物体的速率不变时,物体仍可能具有加速度!。
矢量三重积公式矢量三重积是一种矢量中的重要运算手段,用它可以用向量表达某一复杂的几何图形,它是向量代数的重要内容。
下面就来简单介绍一下矢量三重积的定义和求解公式。
一、定义矢量三重积是指三个矢量,即 a,b,c 之间的乘积,表示为:a xb x c其中,a x b示的是叉乘乘积,也就是向量的叉积。
二、求解公式可以看到,现在有三个向量 a,b,c,求它们的矢量三重积,首先需要知道这三个向量的坐标表示法。
假设有:a=(ax,ay,az)b=(bx,by,bz)c=(cx,cy,cz)那么,矢量三重积 a x b x c计算公式如下:a xb x c=(ay*bz-az*by)*cx+(az*bx-ax*bz)*cy+(ax*by-ay*bx)*cz 从上面的求解公式可以看出,这种矢量三重积计算的方法充分体现了矢量叉乘的性质:向量的叉乘的结果是另一个向量,该向量与两个叉乘向量的垂直。
三、应用实例矢量三重积主要应用在几何、力学和物理中,下面以几何中的一个实例来介绍一下。
假设有三条直线 a,b,c,如果想证明它们是否共面,可以利用矢量三重积求解。
设 a,b,c别对应的方向向量为 a,b,c,那么,可以求出它们的矢量三重积:a xb xc = a*(b x c) =(ay*bz-az*by)*cx+(az*bx-ax*bz)*cy+(ax*by-ay*bx)*cz 如果上面的结果为 0,那么 a,b,c 三条直线的法向量就是共面的,即它们共面。
如果结果不为 0,则意味着 a,b,c 三条直线不共面。
四、总结综上所述,矢量三重积是一种矢量运算,主要用在几何、力学和物理等领域。
矢量三重积的求解公式就是前面所说的,即:a xb xc =(ay*bz-az*by)*cx+(az*bx-ax*bz)*cy+(ax*by-ay*bx)*cz 该公式中,a×b表示向量a与b的叉积,结果是一个向量,与a,b均垂直。
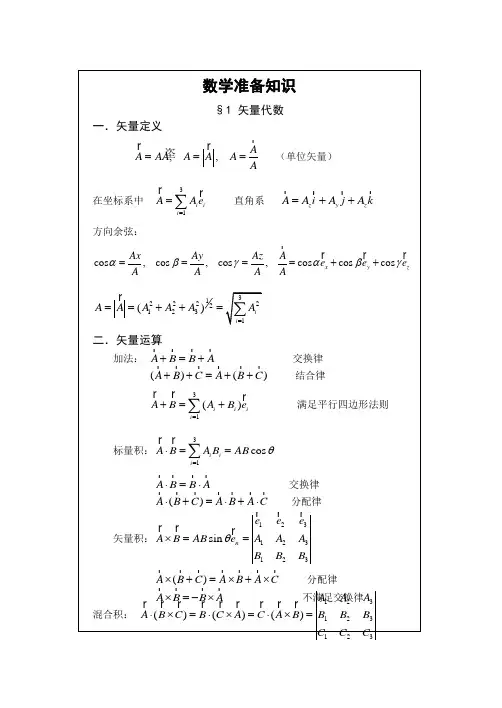
矢量的基本代数运算《微分几何简介》笔记Ch.1 矢量代数及其在解析几何中的简单应用 §1 矢量代数定义:矢量即既有大小,又有方向的量(数学量、物理量等)。
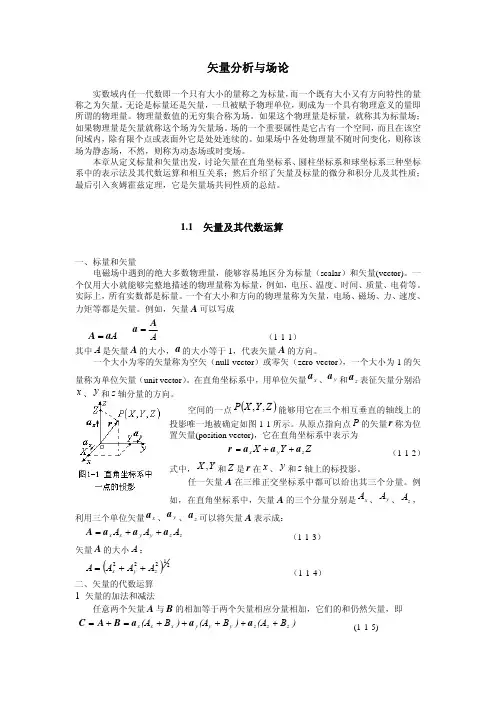
1.1 直角坐标系-点的坐标与矢的分量在三维空间中,取任意一点O 和任意彼此垂直的三个右旋的(即构成右手系的)单位矢量1e ,2e ,3e ,构成一个直角坐标系(或标架)。
用],,;[321e e e O =σ表示;O 称为σ的原点,1e ,2e ,3e 称为σ的基矢(或底矢)。
若P 为空间任意一点,以O 为始点,P 为终点的矢量OP =r 称为P 点在标架σ里的径矢。
P 点在σ里的坐标1x ,2x,3x 就是r 径矢在σ里的分量:332211e e e r x x x ++=若P 、Q 为空间两点,它们在σ里的径矢依次为332211e e e r x x x ++=,332211e e es y y y ++=则矢量333222111)()()(e e e r s x y x y x y OP OQ PQ -+-+-=-=-=其中)3,2,1(=-i x yi i就是该矢量在σ里的分量。
各分量均为0的矢量称为零矢。
在同一标架里,两个矢量相等的充要条件是它们的分量依次相等。
矢量332211e e eαa a a ++=的长为 232221a a a ++=α若1=α,α为单位矢量(幺矢)。
0≠α,则α/ia叫做α在σ里的方向余弦,它们是α和1e 间的角],0[π之间的余弦。
零矢没有方向余弦。
1.2 矢量的基本代数运算现有矢量332211e e eαa a a ++=和332211e e eβb b b ++=,则1) 矢量和:矢量加法按照平行四边形(或三角形)法则。
333222111)()()(e e e βαb a b a b a +++++=+2) 矢量差:矢量减法同样按照平行四边形(或三角形)法则,为加法的逆运算。
333222111)()()(e e e βαb a b a b a -+-+-=-3) 纯量(或数量)乘矢量:若λ为纯量,则332211e e e αa a a λλλλ++=4) 数积(点乘):矢量α,β的数积是纯量θcos 332211βαβα=++=⋅b a b a b a其中],0[πθ∈是α,β之间的角。
矢量α,β相互垂直的充要条件是它们的数积等于零。
零矢与任意矢量垂直。
矢量α和单位矢量e 的数积等于α在e 的方向的垂直投影。
5) 矢积(叉乘):矢量α,β的矢积是矢量n βαe e e βαθsin 321321321==⨯b b b a a a其中n 为α,β不平行时,同时垂直于α,β的幺矢,且α,β,n 按此次序构成右手系。
αβα⊥⨯,ββα⊥⨯矢量α,β相互平行的充要条件是它们的矢积等于零。
零矢与任意矢量平行。
运算规律一览若α,β,γ是任意矢量,λ,μ是任意纯量,则 1) 结合律:αα)()(λμμλ=)()(γβαγβα++=++)()(βαβα⋅=⋅λλ )()(βαβα⨯=⨯λλ2) 交换律:αββα+=+αββα⋅=⋅必须注意:αββα⨯-=⨯ 3) 分配律:αααμλμλ+=+)( βαβαλλλ+=+)(γαβαγβα⋅+⋅=+⋅)( γαβαγβα⨯+⨯=+⨯)(1.3 混合积、三矢矢积、拉格朗日恒等式1) 混合积:已给三个矢量α,β,γ,则βα⨯是矢量,γβα⋅⨯)(是纯量。
若ia ,ib ,ic 依此是α,β,γ的分量,则其混合积为321321321),,()(c c c b b b a a a ==⋅⨯γβαγβα根据行列式性质,有),,(),,(),,(),,(),,(),,(αβγγαββγαβαγαγβγβα-=-=-===混合积),,(γβα的绝对值表示以α,β,γ为棱的平行六面体的体积。
三个矢量α,β,γ共面的充要调价是它们的混合积等于零。
若三个矢量α,β,γ共面,且α,β不平行,则γ是α,β的线性组合:βαγμλ+=2) 三矢矢积: 若α,β,γ是矢量,则三矢矢积为αγββγαγβα)()()(⋅-⋅=⨯⨯3) 拉格朗日(Lagrange )恒等式:))(())(()()(γβδαδβγαδγβα⋅⋅-⋅⋅=⨯⋅⨯ 特殊地2222)()(βαβαβα⋅-=⨯可以证明:只有零矢量同时垂直于三个不共面的矢量。
1.4 对于空间的点、直线和平面的简单应用不妨在标架],,;[321e e e O =σ中来考察空间的点、直线和平面。
显然,空间的任意一点P 可用其径矢=r 来表示。
1) 令空间任意一直线经过某固定点0r ,它与一单位矢量v 平行,r 为直线上任意点,则该直线可表示为vr r t +=0其中t 是纯量。
以上方程称为直线的矢方程,其中t 是参数,因而也叫做参数矢方程。
2) 令空间任意一平面经过某固定点0r ,它与一单位矢量n 垂直,r 为平面上任意点,则该平面的矢方程为)(0=-⋅r r n注意:通常平面具有方向性,与n 同向的一侧称为正侧。
另外,两点确定一条直线,三个不共线的点、两条相交直线、两条平行直线也可以确定一个平面。
3) 过点1r ,作直线vrr t +=0的垂线,其垂足v v r r r r ])[(011⋅-+='点到直线的距离11r r '-=d4) 点1r 到平面0)(0=-⋅r r n 的距离)(01r r n -⋅=d点到平面的垂足nn r r r r ])[(0111⋅--='5) 两相错直线11101αr rt +=与22202αr rt +=的公垂线单位矢量2121ααααn ⨯⨯=它们间的最短距离21211020),,(ααααr r ⨯-=d§2 坐标变换2.1 基矢变换在研究齿轮啮合运动时,我们通常取三个标架,一个固定在空间,称为基础标架,另两个分别和运动中的两个齿轮相固连。
因此,有必要考察两个标架或坐标之间的相互关系。
设],,;[321e e e O =σ,],,;[321e e e ''''='O σ为任意两个直角坐标系。
考察基矢321,,e e e 和321,,e e e '''之间的关系,设在坐标系σ里,标架σ'的基矢321,,e e e '''为)3 ,2 ,1( 31=='∑=i a j j ij i e e即⎪⎪⎪⎭⎫⎝⎛⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎪⎪⎪⎭⎫ ⎝⎛'''321333231232221*********e e e e e e a a a a a a a a a则321i i i a aa ,,是ie '在坐标系σ里的分量,也是方向余弦,即ie '依次和321,,e e e 之间的角的余弦:)3 ,2 ,1 ,( =='j i a ijjie e而在在坐标系σ'里,标架σ的基矢321,,e e e 为)3 ,2 ,1( 31='=∑=i a j j ji i e e或⎪⎪⎪⎭⎫ ⎝⎛'''⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎪⎪⎪⎭⎫ ⎝⎛321332313322212312111321e e e e e e a a a a a a a a a若引进方阵的概念和符号,令⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=333231232221131211a a a a a a a a a A ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=332313322212312111a a a a a a a a a T A则A ,TA 互为转置方阵,且IAA =T ,IA A=T其中I 表示三阶单位方阵。
A 和TA 都是正常正交方阵表明:从一个坐标系的基矢到另一个坐标系的基矢的变换是具有正常正交方阵的线性变换,称为正常正交变换。
若从σ到σ'的基矢的变换方阵是A ,则从σ'到σ的基矢的变换方阵是TA 。
设有三个坐标系σ,σ'和σ'',若从σ到σ'的基矢的变换方阵是A ,从σ'到σ''的基矢的变换方阵是B,则从σ到σ''的基矢的变换方阵为BA C =2.2 矢量的分量变换设1x ,2x,3x 是任意矢量r 在坐标系σ里的分量,则在坐标系σ'里的分量为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡'''321333231232221131211321x x x a a a a a a a a a x x x或AXX ='2.3 点的坐标变换 设任意点P在坐标系],,;[321e e e O =σ里的坐标是X ,在坐标系],,;[321e e e ''''='O σ里的坐标是X ',再设O 点在σ'里的坐标是0X ,则AXX X +='0§3 刚体变换刚体是指在运动中,其上任意两点的距离始终保持不变的物体。
通常我们假定齿轮是刚体,齿轮运动是刚体运动。
设],,;[321e e e O =σ为基础标架,],,;[321e e e ''''='O σ为与齿轮相固连的标架,那么,研究齿轮运动的过程即可归结为σ'的运动的研究。
标架σ'的原点和基矢在σ里都是时间t 的函数,这样位置的变化,就叫做刚体位置变换或简称刚体变换。