第八章机器人编程36页1.4M案例
- 格式:ppt
- 大小:1.34 MB
- 文档页数:38

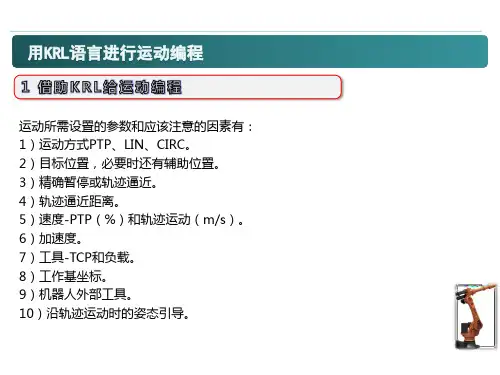

【原创】ABB机器人编程之程序流程指令(含案例)导读:机器人程序的执行是从上到下的方式,从第一条指令逐次扫描至程序的结尾,不断循环。
但是在某种场合,需要程序的等待、程序的跳转以及程序的停止,这些场合都会影响到程序的流程。
例如:在机器人抓取物料的时候,机器人抓完了之后,需要等机器人抓稳了,机器人才移动,这就需要进行程序的等待!那接下来我们来看几个关于程序流程指令吧!1.waitTime:用于等待给定的时间例1:WaitTime 0.5;程序执行等待0.5秒程序执行等待的最短时间(以秒计)为0 s。
最长时间不受限制。
分辨率为0.001 s。
详解:机器人程序指针执行到此条指令,必须等待0.5秒以后才继续往下执行!例2:WaitTime \InPos,0.5详解:在WaitTime指令后面加入了Inpos参数的含义就是:机器人到位且完全停止后才开始计时,时间到达0.5秒以后才继续往下执行!例3:MoveJ p1, vmax, fine, tool2;WaitTime \InPos,0.5;MoveJ p2, vmax, z30, tool2;详解:机器人到达P1位置点之后,并且机器人完全停止下来,才开始计时,时间到达0.5秒以后才机器人继续执行到达P2位置点。
2. WaitDI:用于等待,直至已设置数字信号输入例1:WaitDI di4, 1;仅在已设置di4输入后,继续程序执行。
详解:机器人程序指针执行到此条指令,需要等待开关信号di4为1的时候,才往下执行。
例2:WaitDI di0,1\MaxTime:=3;详解:在WaitDI di0,1指令后面加上了可选参数MaxTime:=3,则表示允许的最长等待时间3秒。
如果在3秒时间以内di0还没有为1,机器人则报错处理。
3. WaitUntil:用于等待,直至满足逻辑条件。
例如,其可以等待,直至已设置一个或多个输入例1:WaitUntil di4 = 1;仅在已设置di4输入后,继续程序执行。

第八章 函数 第12课时 教学目标: 1. 掌握函数的基本知识; 2. 体验函数在编程中的作用; 3. 掌握利用函数解决实际问题的能力。 教学重、难点: 重点:掌握函数的基本知识,函数的创建与调用、参数传递、返回值等; 难点:函数的创建形式。 教学材料: 1. 计算机网络教室环境 2. 电脑 3. VS Code编辑器 4. 机器人套件 教学过程: 一、场景导入(5min) 1. 讲述:在编程中如果某段代码需要多次使用,我们可以把这段代码复制多次,但是这种做法会影响开发效率。那如何让一段代码高效地重复使用呢? 2. 讲述:在Python中,提供了函数来解决这个问题。 3. 提问:讲到函数,同学们接触过哪些函数呢? ➢ 教学说明:这里让学生进行讨论回答,学生通过回顾之前的知识点,回答可能包含print()函数和input()函数。 4. 讲述: print()函数和input()函数等,这些都是Python内置的标准函数,可以直接调用。除了可以直接用的标准函数外,Python还支持自定义函数。我们可以把实现某一功能的代码定义为一个函数,然后在需要使用的时候随时调用,十分方便。对于函数,简单地理解就是可以完成某项工作的程序,有点类似积木块,可以反复的使用,提高代码的利用率。 5. 讲述: 这一章我们将一起学习函数的创建、调用、参数设置、返回值设置等。 二、知识讲授 (20min) ➢ 教学说明:提前让同学们都打开VS Code编辑器,并建立一个新的python文件。准备一张A4纸,机器人绘制正方形的时候会使用到。 第一节 函数的创建与调用 1. 提问:假设我们需要机器人重复绘制正方形。首先,如何绘制一个正方形,这在第二章中我们已经学习过了。当绘制正方形这个功能需要反复使用时,我们在编写程序的时候如何提高代码编写效率呢? ➢ 教学说明:让学生回答,学生想到可以定义一个函数,函数的功能是绘制一个正方形。 2. 讲述:先来了解一下函数的语法格式:
鲸鱼机器人编程案例
鲸鱼机器人是一款集成式教育机器人,有着多种功能,可以用于海洋探索、水下教学、环境监测等方面。
本文将介绍一种针对初学者的鲸鱼机器人编程案例。
案例概述:使用鲸鱼机器人进行环境监测,并通过编程实现自主巡航与数据采集。
案例步骤:
1. 准备工作
准备一艘鲸鱼机器人,确保其能正常与电脑进行通讯,准备好一份编程软件(例如Scratch),安装好所需驱动程序和插件。
2. 设置传感器
根据需求,设置鲸鱼机器人的传感器,比如温度传感器、水位传感器等等。
3. 编写程序
程序示例:
当 flag 被点击
无限循环
如果温度传感器 > 40
鲸鱼机器人以 30% 的速度向前移动
发出警告声音
否则如果水位传感器 > 80
鲸鱼机器人以 50% 的速度向后移动
否则
鲸鱼机器人以 70% 的速度向前移动
发出数据采集信号
4. 测试程序
将编好的程序上传到鲸鱼机器人中进行测试。
可以通过模拟环境来测试程序是否符合要求,发现问题后进行调整。
5. 实际运用
在实际应用中,可以将鲸鱼机器人放入水中,让它自主巡航并采集环境数据,比如测量水温、水位等等。
根据通过传感器获取的数据,机器人可以自主进行相应的操作,如前进、后退、发送数据等等。
该案例虽然较为简单,但已经涵盖了基本的机器人编程知识和技能。
在实际运用中,可以根据具体需求进行优化和改进,使机器人实现更为复杂的操作和功能。
总之,通过这样的编程案例,初学者可以掌握基本的机器人编程技能,为之后的学习和实践打下坚实的基础。
