计算机控制系统第6章-3
- 格式:ppt
- 大小:865.00 KB
- 文档页数:10
第六章习题与思考题典型例题解析例6-1 试述PC微机中断系统的分类与特点。
答:PC微机系统中断包括硬件(外部)中断和软件(内部)中断两大类。
硬件中断包括不可屏蔽中断NMI和可屏蔽中断INTR。
它们都由外部硬件产生。
软件中断包括软件中断INT nH和CPU内部特殊中断,它们由内部中断指令或执行程序过程中出现异常产生的。
软件中断又有DOS中断和BIOS中断之分。
硬件中断的特点是:(1)硬中断是外部事件而引起的中断,因此,硬件中断具有随机性和突发性。
(2)在硬件中断响应周期,CPU需要发中断回答信号(非屏蔽硬件中断不发中断回答信号)。
(3)硬件中断的中断号由中断控制器提供(非屏蔽硬件中断的中断号由系统指定为02H)(4)硬件中断一般是可屏蔽的(非屏蔽硬件中断是不可屏蔽的)。
软件中断的特点是:(1)软件中断是执行中断指令而产生的,无需外部施加中断请求信号。
在程序需要调用某个中断服务程序时,只要安排一条相应中断指令,就可转去执行所需要的中断程序,因此,中断的发生不是随机的,而是由程序安排好的。
(2)在软件中断响应周期,CPU不需要发中断回答信号。
(3)软件中断的中断类型号是在指令中直接给出,因此,不需要使用中断控制器。
(4)软件中断是不可屏蔽的。
例6-2 试述可编程控制器8259A的作用。
答:可编程控制器8259A在协助CPU处理中断事务中所起的作用主要是:(1)接受和扩充外部设备的中断请求。
外设的中断请求,并非直接送到CPU,而是通过8259A接受进来,再由它向CPU提出中断请求。
一片8259A可授受8个中断请求,经过级联可扩展到8片8259A,能接受64个中断请求。
(2)进行中断优先级排队。
外设的中断优先级排队,并不是CPU安排,而是由8259A安排的。
即由8259A中断请求输入引脚(IR)的编号决定的。
连到IR0上的外设中断优先级最高,连到IR7上的外设中断优先级最低。
(3)向CPU提供中断类型号。
计算机控制系统课后答案1. 概述计算机控制系统是指利用计算机进行控制的系统,它采用计算机硬件和软件的协同作用,对被控对象进行监测、测量、判断以及控制操作的任务。
本文将回答计算机控制系统课后习题,以帮助读者加深对该课程的理解。
2. 习题答案2.1 什么是计算机控制系统?计算机控制系统是指利用计算机硬件和软件的协同作用,对被控对象进行监测、测量、判断以及控制操作的系统。
其核心是计算机的控制程序,通过对输入信号的处理和对输出信号的控制,实现对被控对象的精准控制。
2.2 计算机控制系统的组成计算机控制系统主要由以下几个组成部分构成:•输入设备:用于采集被控对象的状态信息,将其转化为数字信号输入到计算机中。
•输出设备:将计算机产生的控制信号转化为可被被控对象接受的信号。
•中央处理单元(CPU):负责执行控制程序,对输入信号进行处理和判断,并产生相应的控制信号。
•存储器:用于存储控制程序和控制数据。
•总线:用于传输控制信号和数据,连接CPU、存储器和输入输出设备。
2.3 计算机控制系统的特点•精确性:计算机控制系统能够对被控对象进行精确的控制,实时调整控制参数,确保控制过程的稳定性和准确性。
•灵活性:通过编写不同的控制程序,可以实现对不同对象的控制,具有很高的灵活性。
•可靠性:计算机控制系统具有自主诊断和故障处理能力,当出现故障时,能够自动检测、定位和修复错误,提高了系统的可靠性。
•扩展性:计算机控制系统可以根据需要增加或替换硬件设备,增加系统的功能和性能。
•可维护性:计算机控制系统通常使用模块化设计,方便对系统进行维护和升级。
2.4 计算机控制系统的应用领域计算机控制系统广泛应用于工业自动化领域,例如:•工业生产线控制:计算机控制系统可以对生产线上的各个环节进行监控和控制,提高生产效率和产品质量。
•交通信号控制:计算机控制系统可以对交通信号灯进行精确控制,实现交通流量的调度和优化。
•智能家居系统:计算机控制系统可以对家庭设备进行智能控制,实现远程操控和自动化管理。


计算机控制技术课后习题答案第一章绪论1.计算机控制系统的控制过程可归纳为以下三个步骤:P2(1)实时数据采集:对来自测量变送装置的被控量的瞬时值进行检测和输入(2)实时决策:对采集到的被控量进行分析和处理,并按预定的控制规律,决定将要采取的控制策略。
(3)实时控制:根据控制决策,适时地对执行机构发出控制信号,完成控制任务。
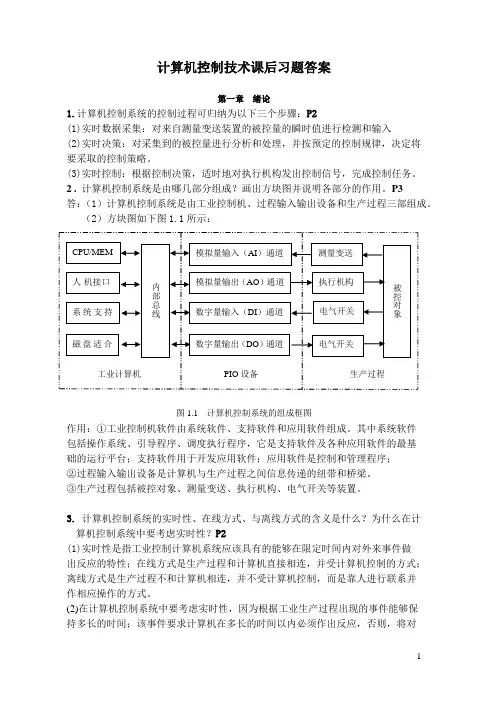
2 .计算机控制系统是由哪几部分组成?画出方块图并说明各部分的作用。
P3答:(1)计算机控制系统是由工业控制机、过程输入输出设备和生产过程三部组成。
(2)方块图如下图1.1所示:图1.1 计算机控制系统的组成框图作用:①工业控制机软件由系统软件、支持软件和应用软件组成。
其中系统软件包括操作系统、引导程序、调度执行程序,它是支持软件及各种应用软件的最基础的运行平台;支持软件用于开发应用软件;应用软件是控制和管理程序;②过程输入输出设备是计算机与生产过程之间信息传递的纽带和桥梁。
③生产过程包括被控对象、测量变送、执行机构、电气开关等装置。
3. 计算机控制系统的实时性、在线方式、与离线方式的含义是什么?为什么在计算机控制系统中要考虑实时性?P2(1)实时性是指工业控制计算机系统应该具有的能够在限定时间内对外来事件做出反应的特性;在线方式是生产过程和计算机直接相连,并受计算机控制的方式;离线方式是生产过程不和计算机相连,并不受计算机控制,而是靠人进行联系并作相应操作的方式。
(2)在计算机控制系统中要考虑实时性,因为根据工业生产过程出现的事件能够保持多长的时间;该事件要求计算机在多长的时间以内必须作出反应,否则,将对生产过程造成影响甚至造成损害。
4. 计算机控制系统有哪几种典型形式?各有什么主要特点?P4~7(1)操作指导系统(OIS)优点:结构简单、控制灵活和安全。
缺点:由人工控制,速度受到限制,不能控制多个对象。
(2)直接数字控制系统(DDC)优点:实时性好、可靠性高和适应性强。
(3)监督控制系统(SCC)优点:生产过程始终处于最有工况。
第1章习题B 习题B1-1 举例说明2-3个你熟悉的计算机控制系统,并说明与常规连续模拟控制系统相比的优点。
B1-2 利用计算机及接口技术的知识,提出一个用同一台计算机控制多个被控参量的分时巡回控制方案。
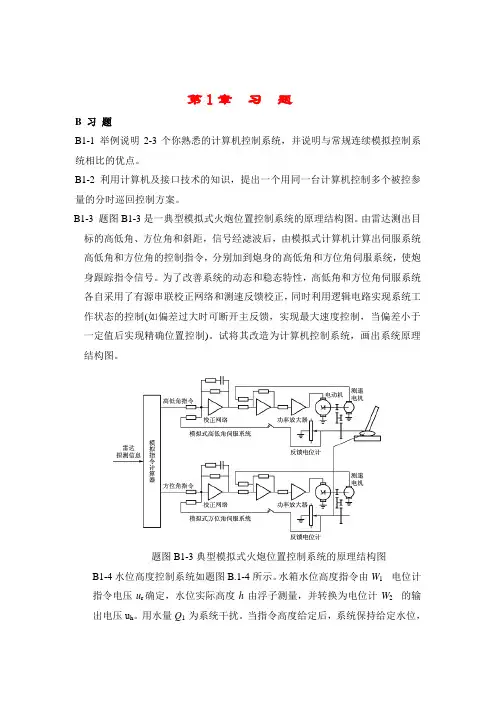
B1-3 题图B1-3是一典型模拟式火炮位置控制系统的原理结构图。
由雷达测出目标的高低角、方位角和斜距,信号经滤波后,由模拟式计算机计算出伺服系统高低角和方位角的控制指令,分别加到炮身的高低角和方位角伺服系统,使炮身跟踪指令信号。
为了改善系统的动态和稳态特性,高低角和方位角伺服系统各自采用了有源串联校正网络和测速反馈校正,同时利用逻辑电路实现系统工作状态的控制(如偏差过大时可断开主反馈,实现最大速度控制,当偏差小于一定值后实现精确位置控制)。
试将其改造为计算机控制系统,画出系统原理结构图。
题图B1-3典型模拟式火炮位置控制系统的原理结构图B1-4水位高度控制系统如题图B.1-4所示。
水箱水位高度指令由W1 电位计指令电压u r确定,水位实际高度h由浮子测量,并转换为电位计W2 的输出电压u h。
用水量Q1 为系统干扰。
当指令高度给定后,系统保持给定水位,如打开放水管路后,水位下降,系统将控制电机,打开进水阀门,向水箱供水,最终保持水箱水位为指令水位。
试把该系统改造为计算机控制系统。
画出原理示意图及系统结构图。
题图B1-4 水箱水位控制系统原理示意图B1-5 题图B1-5为一机械手控制系统示意图。
将其控制器改造为计算机实现,试画出系统示意图及控制系统结构图。
题图B1-5机械手控制系统示意图B1-6题图B1-6为仓库大门自动控制系统示意图。
试将其改造为计算机控制系统,画出系统示意图。
题图B1-6 仓库大门自动控制系统示意图B1-7车床进给伺服系统示意图如题图B1-7所示。
电动机通过齿轮减速机构带动丝杠转动,进而使工作台面实现直线运动。
该系统为了改善系统性能,利用测速电机实现测速反馈。
试将该系统改造为计算机控制系统,画出系统示意图。
第一章作业1-2什么叫闭环控制系统?是比较开环与闭环系统各自的优缺点。
解答:被控制量参与系统控制的控制方式称为闭环控制。
在闭环控制中,在给定值和被控量之间,除了有一条从给定值到被控量方向传递信号的前向通道外,还有一条从被控量到比较元件传递信号的反馈通道。
控制信号沿着前向通道和反馈通道循环传递,故闭环控制又称为反馈控制。
与开环系统相比较:闭环系统从原理上提供了实现高精度控制的可能性,它对控制元件的要求比开环系统的低。
但闭环系统设计比较麻烦,结构也比较复杂,因而成本较高。
第二章 作业2-1用拉式变换法求解下列微分方程,初始条件为零。
(1)T (t)+x(t)=r(t) (其中r(t) 分别为(t) ,1(t) 和t 1(t) )(2) (t)+2(t)+x(t)=1(t) 解答: (1)对微分方程进行拉式变换得:)()()0()(s r s x T s x T x s =++将 )(1)(t t r =, ss r 1)(= 代入式中得)(1)()1(s Tx ss x Ts +=+ 1)0()1)((1)(+++=Ts Tx s T s s xTs x ts s s x 1)0(11)(+++-=等式两边进行拉式变换得:ττtte x e x --+-=)0(1)t (又因为x(0)=0,(2)对微分方程两边进行拉氏变换得:ss x s s 1)()12(2=++22)1(1)12(1)(+=++=s s s s s s x 等式两边进行拉氏变换得:])10(1[)(0t e e t x t ---=- )1(1t e t +-=-2-4 简化图2-25所示系统的结构图,并求传递函数C(s)/R(s)。
解答:将A 点顺时移动,并将前向通路进行串联,将其化简为:将两条反馈通路并联,得下图:再进行化简则有:由此可知传递函数第三章 习题与答案3-5单位反馈系统的开环传递函数为 求能使系统闭环后稳定的开环放大系数K 的范围。