机械原理第一次作业
- 格式:pdf
- 大小:511.40 KB
- 文档页数:3
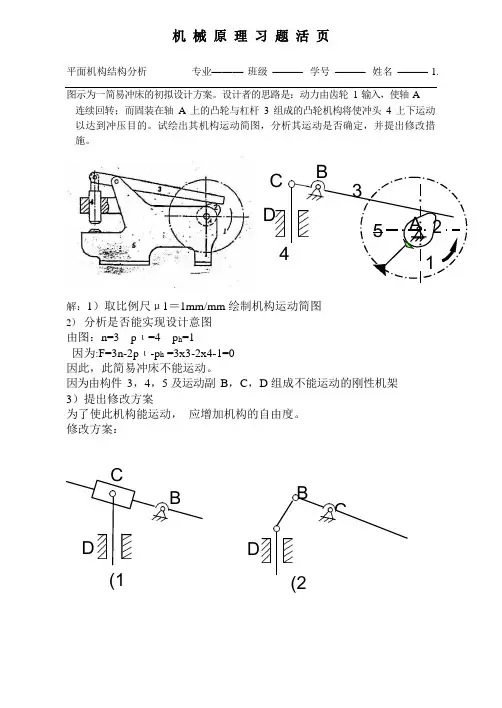
CB D BC平面机构结构分析专业———班级———学号———姓名——— 1.图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1 输入,使轴A连续回转;而固装在轴A 上的凸轮与杠杆3 组成的凸轮机构将使冲头4 上下运动以达到冲压目的。
试绘出其机构运动简图,分析其运动是否确定,并提出修改措施。
C B 35 A 24 1解:1)取比例尺μ1=1mm/mm 绘制机构运动简图2)分析是否能实现设计意图由图:n=3 pι=4 p h=1因为:F=3n-2pι-p h =3x3-2x4-1=0因此,此简易冲床不能运动。
因为由构件3,4,5 及运动副B,C,D 组成不能运动的刚性机架3)提出修改方案为了使此机构能运动,应增加机构的自由度。
修改方案:D(1 (2DG7D 64C EF9 38B 2 A122如图所示为一小型压力机。
图中齿轮 1与偏心轮 1’为同一构件,绕固定轴心 o 连续转动。
在齿轮 5上开有凸轮凹槽,摆杆 4上的滚子 6嵌在凹槽中,从而使摆杆 4 绕 C 轴上下摆动。
同时,又通过偏心轮 1’、连杆 2、滑杆 3使 C 轴上下移动。
最后通过在摆杆 4的叉槽中的滑块 7和铰链 G 使冲头 8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
b)解:计算该机构的自由度n=7, p ι=9, p h =2 F=3n-2p e -p h =3x7-2x8-2=13. 试计算下列二图所示齿轮连杆组合机构的自由度。
图中相切的圆周表示一对齿轮传动的节圆;凡局部自由度、复合铰链和虚约束均需明确指出。
解:a )解n=4 P ι=5 Ph=1F=3x4-2x5-1=134 C A复合铰链1a)BD 5b)解:n=6 Pι=7 Ph=3F=3×6-2×7-3=14.试计算下列二图所示压榨机的自由度。
图a 中,左右两半完全对称;图b 中,CD = FI = KL = KM = FJ = CE,LI =KF = MJ = JE = FC = ID。
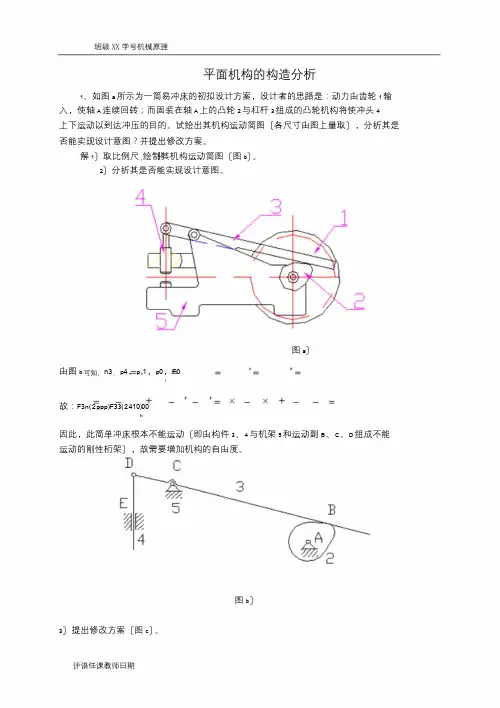
班级XX学号机械原理平面机构的构造分析1、如图a所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以到达冲压的目的。
试绘出其机构运动简图〔各尺寸由图上量取〕,分析其是否能实现设计意图?并提出修改方案。
解1〕取比例尺l绘制其机构运动简图〔图b〕。
2〕分析其是否能实现设计意图。
图a〕由图b可知,n3,p4,p h1,p0,F0l故:F3n(2ppp)F33(2410)00lh因此,此简单冲床根本不能运动〔即由构件3、4与机架5和运动副B、C、D组成不能运动的刚性桁架〕,故需要增加机构的自由度。
图b〕3〕提出修改方案〔图c〕。
评语任课教师日期1班级XX学号机械原理为了使此机构能运动,应增加机构的自由度〔其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c 给出了其中两种方案〕。
图c1〕图c2〕2、试画出图示平面机构的运动简图,并计算其自由度。
图a〕n3,4解:l图b〕解:n4,5p,p h1,F3n2p l p h1l评语任课教师日期2班级XX学号机械原理3、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
3-1解3-1:n7,p l10,p h0,F3n2p l p h1,C、E复合铰链。
3-2解3-2:n8,11p,p h1,F3n2p l p h1,局部自由度l评语任课教师日期3班级XX学号机械原理3-3 解3-3:n9,12p,p h2,F3n2p l p h1l4、试计算图示精压机的自由度评语任课教师日期4班级XX学号机械原理n10,p15,p h0解:n11,p l17,p h0解:lp2p l p h3n250331p2p l p h3n210362F0F0F3n(2p l p h p)FF3n(2p l p h p)F310(21501)01311(21702)01〔其中E、D及H均为复合铰链〕〔其中C、F、K均为复合铰链〕5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的根本杆组。
机械原理大作业范文摘要:机械传动是机械学中的基础内容之一,广泛应用于各个行业和领域。
本文将对机械传动的原理、类型以及应用进行系统的介绍和探讨。
首先介绍了机械传动的定义和作用,然后详细介绍了各种常见的机械传动类型,包括齿轮传动、皮带传动、链传动等,并分别对其工作原理进行了分析。
最后列举了一些机械传动的应用案例,证明了机械传动在现实生活中的重要性和广泛性。
一、引言机械传动是将动力从一个地方传递到另一个地方的机械装置。
它作为机械工程学的基础内容,广泛应用于工业、农业、建筑等各个领域。
机械传动具有传递力量的功能,并能实现运动的改变、平衡、变速等目的。
本文将对机械传动的类型、原理以及应用进行详细介绍。
二、机械传动的类型机械传动可以分为多种类型,常见的有齿轮传动、皮带传动、链传动等。
齿轮传动是利用齿轮间的啮合来传递扭矩和运动的一种传动方式,具有传动效率高、传动比稳定等优点。
皮带传动则是通过绕在两个轮子上的带子来传递力量,常用于需要减速的场合。
链传动与皮带传动类似,但是链传动的传动效率更高,扭矩传递更稳定。
三、机械传动的工作原理1.齿轮传动:齿轮传动采用齿轮之间的啮合来实现传动的目的。
主要通过齿轮的大小、齿数来调整传递的速度和扭矩。
其中,齿轮的齿数比称为传动比,可以实现速度的改变。
齿轮传动通常包括齿轮轴、轴承、齿轮齿廓等组成部分。
2.皮带传动:皮带传动通过绕在轮子上的带子来传递力量。
常见的皮带传动有平行轴带传动和交叉轴带传动。
通过调整轮子的直径和材料来改变传递效果。
皮带传动具有传递动力平稳、减震效果好的特点。
3.链传动:链传动与皮带传动类似,也是通过绕在轮子上的链条来传递力量。
链传动具有噪音低、传动效率高等优点,广泛应用于自行车、摩托车等交通工具中。
四、机械传动的应用1.工业应用:机械传动在工业制造中有广泛的应用。
例如,齿轮传动被广泛应用于机床、起重机械、输送设备等,实现力量的传递和工作的协调。
皮带传动常用于风机、泵等需要平稳传递动力的设备中。
机械原理B线下作业第一次作业一、判断题(判断正误,共2道小题)1. 机构是具有确定运动的运动链正确答案:说法正确2. 平面四杆机构的曲柄存在条件为最长杆与最短杆的杆长之和不大于其余两杆长之和正确答案:说法错误二、主观题(共7道小题)3. 齿轮的定传动比传动条件是什么?答:不论两齿廓在何位置接触,过接触点所作的齿廓公法线必须与两齿轮的连心线相交于一固定点。
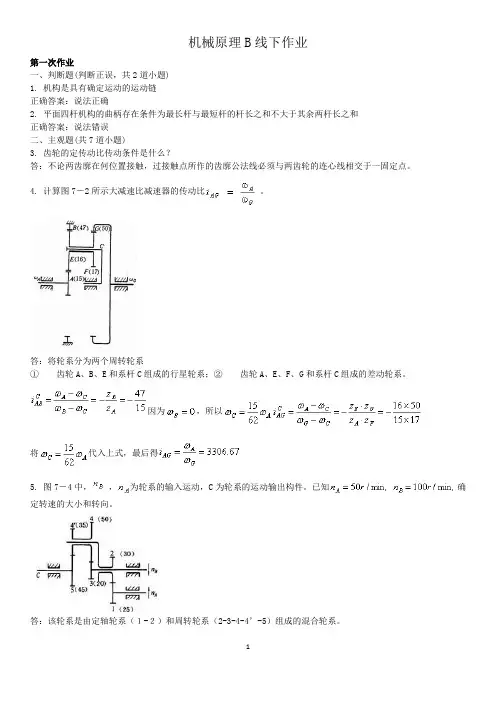
4. 计算图7-2所示大减速比减速器的传动比。
答:将轮系分为两个周转轮系①齿轮A、B、E和系杆C组成的行星轮系;②齿轮A、E、F、G和系杆C组成的差动轮系。
因为,所以将代入上式,最后得5. 图7-4中,,为轮系的输入运动,C为轮系的运动输出构件。
已知确定转速的大小和转向。
答:该轮系是由定轴轮系(1-2)和周转轮系(2-3-4-4’-5)组成的混合轮系。
对定轴轮系(1-2),有即对周转轮系(2-3-4-4’-5),有将,,代入上式,最后得,其中“-”表示齿轮5的转向与相同,方向“↓”,如下图所示。
6. 在图8-3中凸轮为半径为R的圆盘,凸轮为主动件。
(1)写出机构的压力角α与凸轮从图示位置转过的角度δ之间的关系;(2)讨论如果a ≥[a],应采用什么改进设计的措施?答:当凸轮转动任意角时,其压力角a如下图所示。
由图中几何关系有所以机构的压力角 a与凸轮转角之间的关系为(1)如果,则应减小偏距e,增大圆盘半径R和滚子半径r r。
(2)7. 机械系统的等效驱动力矩和等效阻力矩的变化如图9-2所示。
等效构件的平均角速度为。
求该系统的最大盈亏功。
答:由下图中的几何关系可以求出各个盈、亏功的值如下其中“+”表示盈功,“—”表示亏功。
画出示功图,如下图(b),先画出一条水平线,从点a开始,盈功向上画,亏功向下画。
示功图中的最低点对应,最高点对应。
图 (b)可以看出,点b最高,则在该点系统的角速度最大;点c最低,系统的角速度最小。
则的积分下限和上限应为下图(a)中的点b和点c。
机械原理作业总结报告
在本次机械原理作业中,我通过学习和实践,对机械原理的基本概念和应用有了更深入的理解。
以下是我对作业内容的总结报告。
首先,在机械原理的学习过程中,我深入了解了机械的基本原理和运动规律。
我熟悉了平衡条件、力的作用规律、杠杆原理、滑动摩擦和动态平衡等概念。
通过分析实际问题,我能够应用这些知识解决机械的平衡和运动问题。
其次,我在实践中掌握了机械原理的应用方法。
作为机械原理作业的一部分,我需要对给定的机械系统进行分析和设计。
通过计算和模拟,我能够确定系统的力和力矩平衡,并预测系统的运动趋势。
这让我对机械设计有了更深入的认识,并学会了如何应用机械原理解决实际问题。
此外,通过作业的完成,我进一步提高了解决问题的能力和团队合作意识。
在完成作业过程中,我主动与同学们进行讨论和交流,分享我们对问题的分析和解决方法。
这不仅加深了对机械原理的理解,还培养了我们的团队合作能力和沟通技巧。
在未来,我会继续加强对机械原理的学习和实践。
我会深入研究机械原理的更高级内容,并应用到实际的机械设计和问题求解中。
我也计划通过参与机械工程项目和竞赛等实践活动,进一步提升自己的能力和专业技术水平。
总而言之,通过本次机械原理作业的学习和实践,我对机械原
理的基本概念和应用有了更深入的理解。
通过分析和解决实际问题,我提高了解决问题的能力和团队合作意识。
我将继续深入学习和应用机械原理,以进一步发展自己的机械工程能力。
机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械原理作业集1. 弹簧的工作原理。
弹簧是一种储存和释放能量的装置,它的工作原理是利用弹性变形来储存能量。
当外力作用在弹簧上时,弹簧会发生形变,将外力储存在其中。
当外力消失时,弹簧会释放储存的能量,将形变恢复原状。
弹簧的工作原理在机械原理中有着广泛的应用,例如弹簧悬挂系统、弹簧减震系统等。
2. 齿轮传动的优势。
齿轮传动是一种常见的机械传动方式,它的优势在于传动效率高、传动比稳定、传动精度高等特点。
齿轮传动可以将动力从一个轴传递到另一个轴,同时可以改变转速和转矩。
在机械原理中,齿轮传动被广泛应用于各种机械设备中,如汽车变速箱、工业机械等。
3. 杠杆原理及应用。
杠杆是一种简单机械,它的作用是将力量或运动转换成另一种形式。
杠杆原理是利用杠杆的支点和力臂的长度差异来增大或减小力的作用效果。
在实际应用中,杠杆被广泛应用于各种机械装置中,如千斤顶、剪刀、门锁等。
4. 摩擦力的影响。
摩擦力是一种阻碍物体相对运动的力,它的大小取决于物体间的接触面积和摩擦系数。
在机械原理中,摩擦力对机械装置的运动有着重要的影响。
合理利用摩擦力可以增加机械装置的稳定性和安全性,同时也可以减小能量损耗,提高机械效率。
5. 原动机的选择。
在机械装置中,原动机的选择是非常重要的。
不同的原动机适用于不同的工作环境和工作要求。
例如,电动机适用于需要稳定转速和精确控制的场合,而内燃机适用于需要大功率输出和移动性的场合。
正确选择原动机可以提高机械装置的效率和可靠性。
6. 机械传动的维护。
机械传动在长时间工作后需要进行维护保养,以确保其正常运行。
常见的维护工作包括润滑、紧固、清洁等。
定期的维护保养可以延长机械传动的使用寿命,减小故障率,提高工作效率。
7. 机械原理的应用。
机械原理在现代工程中有着广泛的应用,涉及到机械设计、机械制造、机械维护等方面。
了解和掌握机械原理对于工程师和技术人员来说是非常重要的,它可以帮助他们更好地设计和制造机械装置,解决实际工程中的问题。
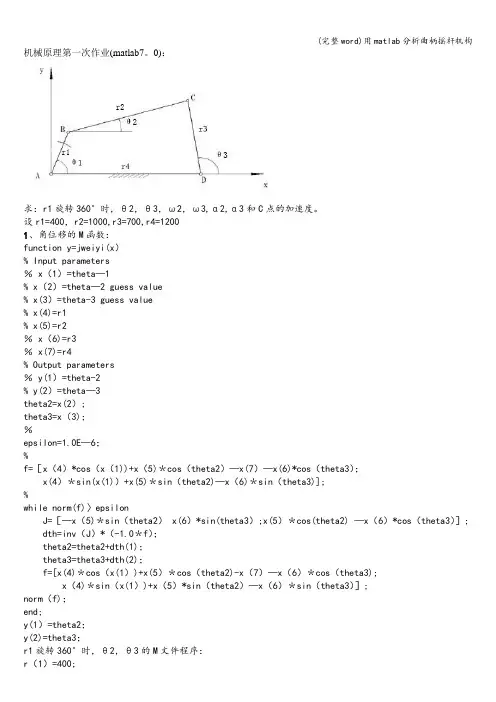
机械原理第一次作业(matlab7。
0):求:r1旋转360°时,θ2,θ3,ω2,ω3,α2,α3和C点的加速度。
设r1=400,r2=1000,r3=700,r4=12001、角位移的M函数:function y=jweiyi(x)% Input parameters% x(1)=theta—1% x(2)=theta—2 guess value% x(3)=theta-3 guess value% x(4)=r1% x(5)=r2% x(6)=r3% x(7)=r4% Output parameters% y(1)=theta-2% y(2)=theta—3theta2=x(2);theta3=x(3);%epsilon=1.0E—6;%f=[x(4)*cos(x(1))+x(5)*cos(theta2)—x(7)—x(6)*cos(theta3);x(4)*sin(x(1))+x(5)*sin(theta2)—x(6)*sin(theta3)];%while norm(f)〉epsilonJ=[—x(5)*sin(theta2) x(6)*sin(theta3);x(5)*cos(theta2) —x(6)*cos(theta3)]; dth=inv(J)*(-1.0*f);theta2=theta2+dth(1);theta3=theta3+dth(2);f=[x(4)*cos(x(1))+x(5)*cos(theta2)-x(7)—x(6)*cos(theta3);x(4)*sin(x(1))+x(5)*sin(theta2)—x(6)*sin(theta3)];norm(f);end;y(1)=theta2;y(2)=theta3;r1旋转360°时,θ2,θ3的M文件程序:r(1)=400;r(2)=1000;r(3)=700;r(4)=1200;dr=pi/180;th(1)=0;th(2)=44。
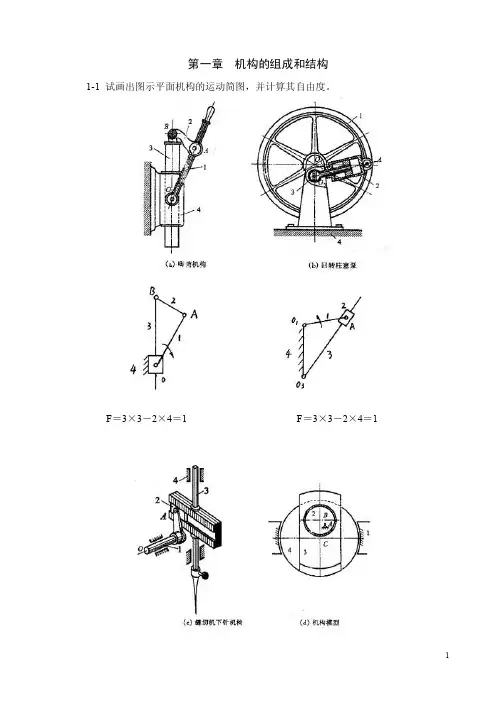
第一章机构的组成和结构1-1 试画出图示平面机构的运动简图,并计算其自由度。
F=3×3-2×4=1 F=3×3-2×4=1F=3×3-2×4=1 F=3×3-2×4=11-2 计算图示平面机构的自由度。
将其中高副化为低副。
确定机构所含杆组的数目和级别,以及机构的级别。
(机构中的原动件用圆弧箭头表示。
)F=3×7-2×10=1 F=3×7-2×10=1 含3个Ⅱ级杆组:6-7,4-5,2-3。
含3个Ⅱ级杆组:6-7,4-5,2-3。
该机构为Ⅱ级机构构件2、3、4连接处为复合铰链。
该机构为Ⅱ级机构F=3×4-2×5-1=1 F=3×3-2×3-2=1F=3×5-2×7=1(高副低代后)F=3×5-2×7=1(高副低代后)含1个Ⅲ级杆组:2-3-4-5。
含2个Ⅱ级杆组:4-5,2-3。
该机构为Ⅲ级机构构件2、3、4连接处为复合铰链。
该机构为Ⅱ级机构F=3×8-2×11-1=1 F=3×6-2×8-1=1F=3×9-2×13=1(高副低代后)F=3×7-2×10=1(高副低代后)含4个Ⅱ级杆组:8-6,5-7,4-3,2-11。
含1个Ⅱ级杆组6-7。
该机构为Ⅱ级机构含1个Ⅲ级杆组2-3-4-5。
第二章 连 杆 机 构2-1 在左下图所示凸轮机构中,已知r = 50mm ,l OA =22mm ,l AC =80mm,︒=901ϕ,凸轮1的等角速度ω1=10rad/s ,逆时针方向转动。
试用瞬心法求从动件2的角速度ω2。
解:如右图,先观察得出瞬心P 13和P 23为两个铰链中心。
再求瞬心P 12:根据三心定理,P 12应在P 13与P 23的连线上,另外根据瞬心法,P 12应在过B 点垂直于构件2的直线上,过B 点和凸轮中心O 作直线并延长,与P 13、P 23连线的交点即为P 12。
机械原理作业集1. 引言。
机械原理是机械工程的基础学科,是研究机械运动和力学关系的学科。
在工程实践中,机械原理是设计和制造机械设备的基础,因此对于机械工程专业的学生来说,掌握机械原理是非常重要的。
本作业集旨在帮助学生巩固和加深对机械原理知识的理解,提高解决机械工程问题的能力。
2. 题目一,力学基础。
力学是机械原理的基础,它研究物体的运动和受力情况。
在机械工程中,我们经常需要计算物体的受力和运动情况,因此对力学的理解至关重要。
在这一部分的作业中,我们将涉及力的合成、分解、平衡、摩擦等内容,通过一系列的问题,帮助学生巩固力学基础知识。
3. 题目二,机械结构分析。
机械结构是机械系统的重要组成部分,它直接影响着机械系统的性能和稳定性。
在这一部分的作业中,我们将涉及机械结构的静力学分析、动力学分析、受力分析等内容,通过实际案例和问题,帮助学生掌握机械结构分析的方法和技巧。
4. 题目三,机械传动。
机械传动是机械系统中常见的一种形式,它通过传动装置将动力传递给机械设备,实现运动和工作。
在这一部分的作业中,我们将涉及齿轮传动、带传动、链传动等内容,通过实际问题和计算,帮助学生理解不同类型的机械传动原理和应用。
5. 题目四,机械原理应用案例分析。
在这一部分的作业中,我们将给出一些实际的机械原理应用案例,通过分析和解决这些案例中的问题,帮助学生将理论知识应用到实际工程问题中,培养学生的工程实践能力和解决问题的能力。
6. 结语。
机械原理是机械工程专业的基础课程,对于学生来说,掌握机械原理知识是非常重要的。
通过本作业集的学习,希望能够帮助学生巩固和加深对机械原理知识的理解,提高解决机械工程问题的能力,为将来的工程实践打下坚实的基础。
第一章绪论1—1 试说明机器与机构的特征、区别和联系。
解:机器具有如下三个特征:1、人造的实物组合体2、各部分具有确定的相对运动3、代替或减轻人类劳动,完成有用功或实现能量的转换机构则具有机器的前两个特征。
机器与机构的区别:研究的重点不同:机构:实现运动的转换和力的传递;机器:完成能量的转换或作有益的机械功。
机器与机构的联系:机器由机构组成,一部机器包含不同的机构;不同的机器可能包含相同的机构。
1—2 试举出两个机器实例,并说明其组成、功能。
解:车床:由原动部分(电动机)+传动系统(齿轮箱)+执行部分(刀架、卡盘等),其主要功能为切削,代替人作功。
汽车:由原动部分(发动机)+传动系统(变速箱)+执行部分(车轮等),其主要功能为行走、运输,代替人作功。
第二章平面机构的结构分析2—1 试画出唧筒机构的运动简图,并计算其自由度。
2—2 试画出缝纫机下针机构的运动简图,并计算其自由度。
142332343=⨯-⨯=--====hlhlppnFppn,,解:解:142332343=⨯-⨯=--====hlhlppnFp pn,,2—3 试画出图示机构的运动简图,并计算其自由度。
2—4 试画出简易冲床的运动简图,并计算其自由度。
解:或1423323043=××=====hlh l p p n F p p n ,,解:1725323075=××=====hl h l p p n F p p n ,,2—5 图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A连续回转,而装在轴A上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的,试绘出其机构运动简图,分析是否能实现设计意图,并提出修改方案。
解:机构简图如下:机构不能运动。
可修改为:1725323143=-⨯-⨯=--====hlhlppnFppn,,或11524323154=-⨯-⨯=--====hlhlppnFppn,,2—6 计算图示自动送料剪床机构的自由度,并指出其中是否有复合铰链、局部自由度或虚约束。
机械原理复习题第一章机械的结构分析复习思考题1、两构件构成运动副的特征是什么?2、如何区别平面及空间运动副?1、何谓自由度和约束?2、转动副与移动副的运动特点有何区别与联系?3、何谓复合铰链?计算机构自由度时应如何处理?4、机构具有确定运动的条件是什么?5、什么是虚约束?习题1、画出图示平面机构的运动简图,并计算其自由度。
(a)(b) (c)2、一简易冲床的初拟设计方案如图。
设计者的思路是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图,分析其运动是否确定,并提出修改措施。
3、计算图示平面机构的自由度;机构中的原动件用圆弧箭头表示。
(a) (b) (c)(d) (e) (f)第二章 平面机构的运动分析复习思考题1、已知作平面相对运动两构件上两个重合点的相对速度12A A V 及12B B V 的方向,它们的相对瞬心P 12在何处?2、当两构件组成滑动兼滚动的高副时,其速度瞬心在何处?3、如何考虑机构中不组成运动副的两构件的速度瞬心?4、利用速度瞬心,在机构运动分析中可以求哪些运动参数?5、在平面机构运动分析中,哥氏加速度大小及方向如何确定?习题1、试求出下列机构中的所有速度瞬心。
(a) (b)(c) (d)2、图示的凸轮机构中,凸轮的角速度ω1=10s-1,R=50mm,l A0=20mm,试求当φ=0°、45°及90°时,构件2的速度v。
题2图凸轮机构题3图组合机构3、图示机构,由曲柄1、连杆2、摇杆3及机架6组成铰链四杆机构,轮1′与曲柄1固接,其轴心为B,轮4分别与轮1′和轮5相切,轮5活套于轴D上。
各相切轮之间作纯滚动。
试用速度瞬心法确定曲柄1与轮5的角速比ω1/ω5。
4、在图示的颚式破碎机中,已知:x D=260mm,y D=480mm,x G=400mm,y G=200mm,l AB=l CE=100mm,l BC=l BE=500mm,l CD=300mm,l EF=400mm,l GF=685mm, 1=45°,ω1=30rad/s 逆时针。
机械原理第一章作业
本人于十一假期前往大连市宜家家居进行现场调研拍摄,选择沙发床的床体进行案例分析。
一、机器照片与功能分析
(1)工作照片:如图所示
(2)主功能描述:主运动——床体展开、闭合运动如图
通过对床体进行闭合、展开,当床体展开时,人们可在床上进行休息,当床体闭合时,由于床体此时占地面积大幅度减小,变成沙发,可以最大程度节省空间,符合人们在日常生活中的需求。
(3)功能实现:原动件气缸3、4伸长时,带动杆件2、5、6转动,从而使床体向上转动,实现闭合;当气缸3、4缩短时,杆件2、5、6床体向下转动,实现展开。
二、机构简图与自由度
(1)根据照片显示,实现床体展开——闭合的机构中有6个构件(两侧对称,存在虚约束,因此只取床体一侧的机构研究,另一侧与之对称),6个回转副,1个移动副,无高副,底部横杆与数值木板固定连接在一起,可一并视为机架,原动件为气缸。
(2)机构简图如图
(3)由于沙发床两侧机构对称,具有虚约束,因此去掉机构对称部分,且该机
构无局部自由度和复合铰链,综上该机构的自由度:F=3n-2P
L -P
H
=3×5-2×
7-0=1。
机械原理课内实验心得体会机械原理课内实验心得体会机械原理课程设计心得体会十几天的机械原理课程设计结束了,在这次实践的过程中学到了一些除技能以外的其他东西,领略到了别人在处理专业技能问题时显示出的优秀品质,更深切的体会到人与人之间的那种相互协调合作的机制,最重要的还是自己对一些问题的看法产生了良性的变化.在社会这样一个大群体里面,沟通自然是为人处世的基本,如何协调彼此的关系值得我们去深思和体会.在实习设计当中依靠与被依靠对我的触及很大,有些人很有责任感,把这样一种事情当成是自己的重要任务,并为之付出了很大的努力,不断的思考自己所遇到的问题.而有些人则不以为然,总觉得自己的弱势…..其实在生活中这样的事情也是很多的,当我们面对很多问题的时候所采取的具体行动也是不同的,这当然也会影响我们的结果.很多时候问题的出现所期待我们的是一种解决问题的心态,而不是看我们过去的能力到底有多强,那是一种态度的端正和目的的明确,只有这样把自己身置于具体的问题之中,我们才能更好的解决问题.在这种相互协调合作的过程中,口角的斗争在所难免,关键是我们如何的处理遇到的分歧,而不是一味的计较和埋怨.这不仅仅是在类似于这样的协调当中,生活中的很多事情都需要我们有这样的处理能力,面对分歧大家要消除误解,相互理解,增进了解,达到谅解…..也许很多问题没有想象中的那么复杂,关键还是看我们的心态,那种处理和解决分歧的心态,因为毕竟我们的出发点都是很好的.课程设计也是一种学习同事优秀品质的过程,比如我组的纪超同学,人家的确有种耐得住寂寞的心态.确实他在学习上取得了很多傲人的成绩,但是我所赞赏的还是他追求的过程,当遇到问题的时候,那种斟酌的态度就值得我们每一位学习,人家是在用心造就自己的任务,而且孜孜不倦,追求卓越.我们过去有位老师说得好,有有些事情的产生只是有原因的,别人能在诸如学习上取得了不一般的成绩,那绝对不是侥幸或者巧合,那是自己付出劳动的成果的彰显,那是自己辛苦过程的体现.这种不断上进,认真一致的心态也必将导致一个人在生活和学习的各个方面做的很完美,有位那种追求的锲而不舍的过程是相同的,这就是一种优良的品质,它将指引着一个人意气风发,更好走好自己的每一步.在今后的学习中,一定要戒骄戒躁,态度端正,虚心认真….要永远的记住一句话:态度决定一切.一、温故而知新。