R
E
i(t)
C
UC
i(t) R i(t)×R
dU c dq dcU c = =C dt dt dt
一阶微分方程(一阶系统)
dy (t ) τ + y (t ) = x(t ) dt
dUc RC + Uc (t ) = E dt 故有: dy (t ) RC + y (t ) = x(t ) dt
§2-1-1 测量系统的数学模型
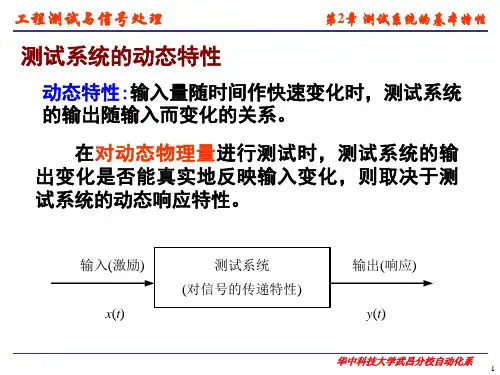
第二章
测量系统的基本特性
§2-1 测量系统 §2-2 测量系统的静态特性 §2-3 测量系统的动态特性 §2-4 测量系统的不失真测量
本章要求
了解线性系统的基本特性,重点掌握频率 保持性. 掌握测量系统的静态及动态特性指标,并 理解其在工程应用中的作用. 掌握信号失真的原因及类型,测量系统实 现不失真测量的条件. 了解测量系统基本特性的测试方法.
§2-1-2 线性系统的主要性质
假如已知系统是线性的和其输入的频 那么依据频率保持性, 率,那么依据频率保持性,可以认定测得 信号中只有与输入频率相同的成分才真正 是由该输入引起的输出, 是由该输入引起的输出,而其他频率成分 都是噪声(干扰). 都是噪声(干扰).
§2-2 测量系统的静态特性
指对于静态输入的信号,测量系统的输出 于输入间的相互关系. 静态特性指标就是描述系统性能好坏的一 些指标. 表述静态特性的参数主要有线性度,灵敏 度,滞差,漂移等.
§2-2 测量系统的静态特性指标
线性度(非线性度) 一,线性度(非线性度)
线性度是指测量装置输出,输入之间保持常值 比例关系的程度. 理想的测量装置输出与输入呈线性关系.然而, 实际的测量装置即使在量程范围内, 输出与输入 的线性关系严格来说也是不成立的, 总存在一定 的非线性. 线性度是评价非线性程度的参数.