重庆大学机械原理习题集-5轮系-1
- 格式:doc
- 大小:218.00 KB
- 文档页数:2
第八章轮系一、选择题1.轮系可以分为________两种类型。
A.定轴轮系和差动轮系B.差动轮系和行星轮系C.定轴轮系和复合轮系D.定轴轮系和周转轮系2.差动轮系的自由度为_________。
A.1B.2C.3D.43.行星轮系的自由度为__________。
A.1B.2C.3D.44.在定轴轮系中,设轮1为起始主动轮,轮N为最末从动轮,则定轴轮系始末两轮传动比数值计算的一般公式是i1n=_________。
A.轮1至轮N间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积B.轮1至轮N间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积C.轮N至轮1间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积D.轮N至轮1间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积5.在运用反转法解决周转轮系传动比的计算问题时,下列公式中________是正确的。
A.i H mn=(nm —nH)/(nn—nH) B.i Hmn=(nn—nH)/(nm—nH)C.i Hmn =(nH—nn)/(nm—nn) D.i Hmn=(nm—nn)/(nn—nH)6.基本周转轮系是由________构成。
A.行星轮和中心轮B.行星轮、惰轮和中心轮C.行星轮、行星架和中心轮D.行星轮、惰轮和行星架7.下列四项功能中,哪几项_______可以通过轮系的运用得以实现。
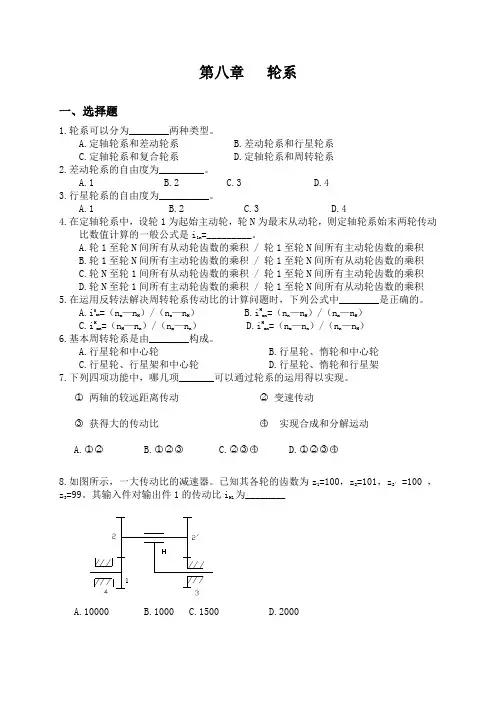
○1两轴的较远距离传动○2变速传动○3获得大的传动比○4实现合成和分解运动A.○1○2B.○1○2○3C.○2○3○4D.○1○2○3○48.如图所示,一大传动比的减速器。
已知其各轮的齿数为z1=100,z2=101,z2’=100 ,z 3=99。
其输入件对输出件1的传动比iH1为________A.10000B.1000C.1500D.2000二、判断题1.定轴轮系的传动比数值上等于组成该轮系各对啮合齿轮传动比的连乘积( )2.周转轮系的传动比等于各对齿轮传动比的连乘积。
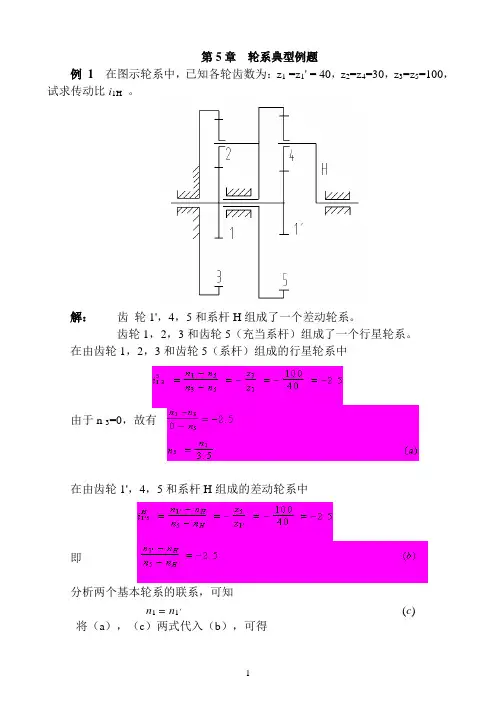
第5章轮系典型例题例1在图示轮系中,已知各轮齿数为:z1 =z1' = 40,z2=z4=30,z3=z5=100,试求传动比i1H。
解:齿轮1',4,5和系杆H组成了一个差动轮系。
齿轮1,2,3和齿轮5(充当系杆)组成了一个行星轮系。
在由齿轮1,2,3和齿轮5(系杆)组成的行星轮系中由于n 3=0,故有在由齿轮1',4,5和系杆H组成的差动轮系中即分析两个基本轮系的联系,可知n1= n1'(c)将(a),(c)两式代入(b),可得计算结果为正,表明从动系杆H和主动齿轮1的转向相同。
例2 在图示轮系中,已知各轮齿数为:z 1 = 90,z 2 = 60,z 2' = 30,z 3 =30,z 3' = 24,z 4 = 18,z 5 = 60,z 5' = 36,z 6 = 32。
运动从A,B两轴输入,由构件H输出。
已知n A=100r/min,n B=900r/min,转向如图所示。
试求输出轴H的转速n H的大小和方向。
解:齿轮3',4,5和系杆H组成了一个差动轮系齿轮1,2,2',3组成了一个定轴轮系,齿轮5',6组成了另一个定轴轮系。
对于齿轮3',4,5和系杆H组成的差动轮系,有即对于齿轮1,2,2',3组成的定轴轮系,有即对于齿轮5,6组成的定轴轮系,有即分析三个轮系之间的基本联系,有将该结果带入(a)式,可得化简整理后得计算结果为负,说明n H转向与n 5 相同,即n A,n B转向相反。
例3 在图示轮系中,已知齿轮1的转速为n 1 =1650 r/min,齿轮4的转速n4=1000r/min,所有齿轮都是标准齿轮,且z 2=z 5=z 6=20。
求各个齿轮中未知的齿轮齿数。
解:由齿轮1与齿轮3和齿轮6与齿轮4的同轴条件得齿轮1,2,3及系杆H1组成差动轮系;齿轮4,5,6及系杆H2组成行星轮系。
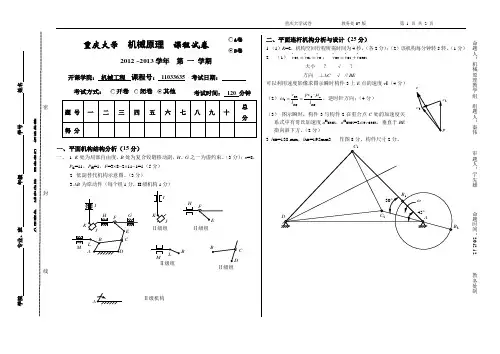
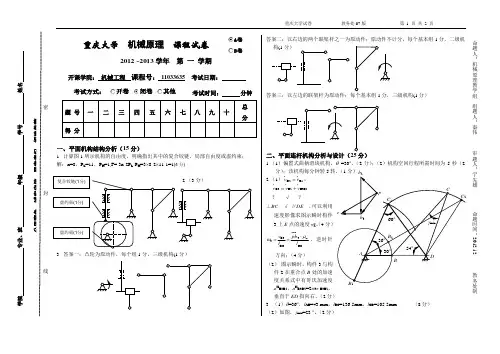
重庆大学 机械原理 课程试卷2012 ~2013学年 第 一 学期开课学院: 机械工程 课程号: 11033635 考试日期:考试方式:考试时间: 120 分钟一、平面机构结构分析(15分)一、 1. K 处为局部自由度、B 处为复合铰链移动副,H 、G 之一为虚约束。
(3分);n =8,P L =11,P H =1,F =3⨯8-2⨯11-1=1(5分) 2. 低副替代机构示意图。
(3分)3.AB 为原动件(每个组1分,II 级机构1分)二、平面连杆机构分析与设计(25分)1.(1)K =2,机构空回行程所需时间为4秒,(各2分);(2)该机构每分钟转5转。
(1分)2. (1) C2C1C v v v == , C3C2C3C2v v v =+ 大小 ? √ ?方向 ⊥AC √ ∥BE可以利用速度影像求图示瞬时构件3上E 点的速度v E (4分) (2)v C333AC ACpc v l l μω⋅== ,逆时针方向;(4分) (3) 图示瞬时,构件3与构件2在重合点C 处的加速度关系式中有哥氏加速度a K C3C2,a KC3C2=2ω3v C3C2,垂直于BE 指向斜下方。
(2分)3. l CD =138 mm ,l AD =195mm3 作图8分,构件尺寸2分。
命题人:机械原理教学组 组题人:秦伟审题人:宁先雄 命题时间:2012.12 教务处制学院 专业、班 年级 学号 姓名公平竞争、诚实守信、严肃考纪、拒绝作弊封线密p e 2 B 2Ⅱ级机构Ⅱ级组Ⅱ级组CⅡ级组BⅡ级组三、凸轮机构分析(10分)1. 简答题(1)答:有柔性冲击;(2分):(2)答:增大基圆半径或适当设置偏距(2分): 2. 偏距圆、基圆、理论轮廓线、α各1分,s 2分。
四、齿轮机构参数计算(10分)m h mz d *a 2a 2+=,m = 4 mm (2分),)(5.021z z m a += ,z 1 = 40(2分) mm 28.622/===ππm s (2分),mm 18.75)cos (5.0cos 1===ααmz r r b (2分) mm 81.11cos ===απm p p b n (2分)五、轮系传动比计算(15分)1. 蜗轮的转向判断时与蜗杆的转向、蜗杆的旋向、蜗杆的安装位置有关。

第一章
习题
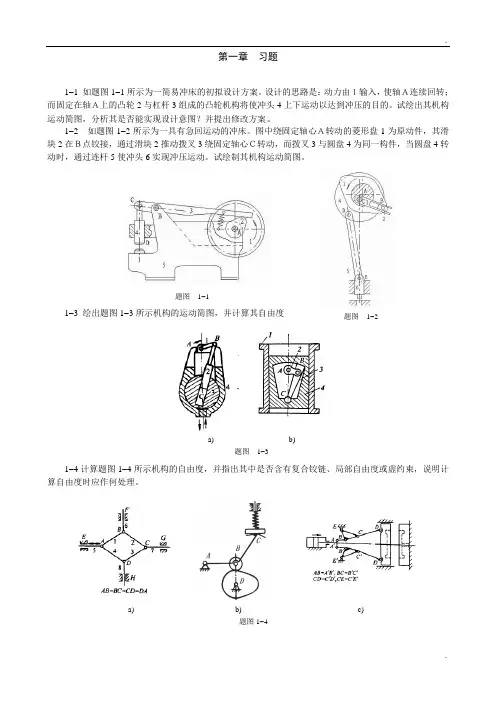
1-1 如题图1-1所示为一简易冲床的初拟设计方案。
设计的思路是:动力由1输入,使轴A连续回转;而固定在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图,分析其是否能实现设计意图?并提出修改方案。
1-2 如题图1-2所示为一具有急回运动的冲床。
图中绕固定轴心A转动的菱形盘1为原动件,其滑块2在B点铰接,通过滑块2推动拨叉3绕固定轴心C转动,而拨叉3与圆盘4为同一构件,当圆盘4转动时,通过连杆5使冲头6实现冲压运动。
试绘制其机构运动简图。
1-3 绘出题图1-3所示机构的运动简图,并计算其自由度
1-4计算题图1-4所示机构的自由度,并指出其中是否含有复合铰链、局部自由度或虚约束,说明计算自由度时应作何处理。
题图1-1
题图1-2
a) b)
题图1-3
a) b) c)
题图1-4
1-5在题图1-5a、b、c中,分别取AB及EF为原动件时,划分其基本杆组,确定机构的级别。
将题图1-5d、e、f中的虚约束、局部自由度去除,并在高副低代后,分析组成这些机构的基本杆组,确定机构的级别。
题图1-5。
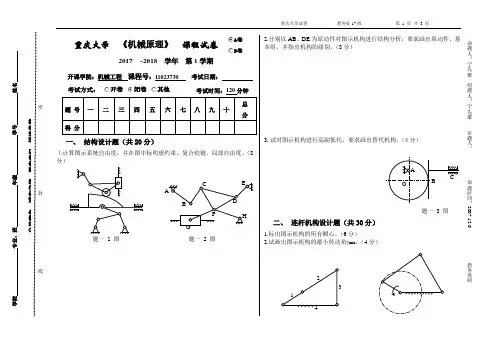
重庆大学 《机械原理》 课程试卷juanA卷B卷2017 ~2018学年 第1学期 开课学院:机械工程 课程号:11023730 考试日期:考试方式:开卷闭卷 其他 考试时间:120分钟一、 结构设计题(共20分)⒈计算图示系统自由度,并在图中标明虚约束、复合铰链、局部自由度。
(8分)题一 1 图 题一 2 图2.分别以AB 、DE 为原动件对图示机构进行结构分析,要求画出原动件、基本组,并指出机构的级别。
(8分)3.试对图示机构进行高副低代,要求画出替代机构。
(4分)题一 3 图二、 连杆机构设计题(共30分)1.标出图示机构的所有瞬心。
(6分)2.试画出图示机构的最小传动角 min 。
(4分)命题人:宁先雄 组题人:宁先雄审题人:命题时间:2007-12-6教务处制学院 专业、班 年级 学号 姓名公平竞争、诚实守信、严肃考纪、拒绝作弊封线密题二 1 图题二 2 图3.试画出3种从动件具有急回运动特性的平面四杆机构的示意图,并写出机构名称及各构件尺寸应满足的条件。
(8分)4.图示平底摆动从动件盘状凸轮机构的凸轮为圆盘,摩擦圆、摩擦角、驱动力矩Md 、阻力FR如图所示。
试画出图示机构的静力分析图。
(6分)题二 4 图5.已知曲柄滑块机构的行程速比系数K=1.25、滑块行程H=250mm、偏距e=50mm。
试用图解法设计该机构。
要求画出设计图(不写作图过程)、写出极位夹角θ、曲柄长度a和连杆长度b的计算式和计算结果。
建议作图比例尺为μL=0.01m/mm。
(6分)三、齿轮机构题(10分)一对正常齿制标准安装的外啮合直齿圆柱齿轮传动,已知传动比 i=2.5,中心距a=175mm,小齿轮齿数z1=20,压力角α=20°。
试计算模数m、大齿轮的几何尺寸r2、rb2、 ra2和rf2。
四、凸轮机构题(10分)图示机构的凸轮轮廓线由两段直线和两段圆弧组成。
(1)画出偏距园;(2)画出理论廓线;(3)画出基园;(4)画出当前位置的从动件位移s;(5)画出当前位置的凸轮机构压力角α;(6)画出从动件升程h;(7)标注凸轮转向并说明原因。

重庆大学 机械原理 课程试卷2012 ~2013学年 第 一 学期开课学院: 机械工程 课程号: 11033635 考试日期:考试方式:考试时间: 分钟一、平面机构结构分析(15分)1. 计算图1所示机构的自由度,明确指出其中的复合铰链、局部自由度或虚约束; 解:n=8,P L =11,P H =1,F= 3n-2P L -P H =3⨯8-2⨯11-1=1(4分)3. 答案一:凸轮为原动件,每个组1分,三级机构(1分)答案二:以右边的两个联架杆之一为原动件:原动件不计分,每个基本组1分,二级机答案三:以左边的联架杆为原动件:每个基本组1分,三级机构(1分)二、平面连杆机构分析与设计(25分)1.(1)偏置式曲柄滑块机构,θ =30︒,(2分);(2)机构空回行程所需时间为5秒(2分);该机构每分钟转5转。
(1分)2.(1)B2B1v v =, B 3B 2B 3v v v =+? √ ?⊥BC √ ∥DE ,可以利用速度影像求图示瞬时构件3上E 点的速度v E 。
(4分)vB333BC BCpb v l l μω⋅==,逆时针方向;(4分)(2) 图示瞬时,构件3与构件2在重合点B 处的加速度关系式中有哥氏加速度a K B3B2,a K B3B2=2ω3v B3B2,垂直于ED 指向右。
(2分)3. (1)θ=36︒,l AB =43 mm ,l BC =136.5mm ,l CD =105.5mm (8分) (2)如图,γmin =23 ︒。
(2分)命题人:机械原理教学组组题人:秦伟审题人:宁先雄命题时间:2012.12教务处制学院 专业、班 年级 学号 姓名公平竞争、诚实守信、严肃考纪、拒绝作弊封线密虚约束(1分)复合铰链(1分)虚约束(1分)三、凸轮机构分析(10分)1. 简答题(每题2分): (1)答:有刚性冲击; (2)答:增大基圆半径2. 基圆、理论轮廓线各1分,s 、α各2分。
四、齿轮机构参数计算(10分)1. a 12=68mm ,a 34=67.5mm ,(2分)2. 正传动,α '34=21.127°, r 3′=22.67mm (6分)3. β=6.95°(2分)五、轮系传动比计算(15分)解:1. A 轮被刹住时,此轮系即为一个定轴轮系4321543215115)1(z z z z z z z z n ni ''-==,3020309060601450515⨯⨯⨯⨯-==n imin)/r (185-==n n B ,其方向箭头向下↓(4分)2. B 轮被刹住时,由1、2、2'、3、A (H )构成差动轮系 由3'、4、5、A (H )构成行星轮系21323113-'=-=z z z z n n n n i A A A 435435353-z z z z n n n n n n n i A A A A A '''-=--=-= 联立求解得:min)/(32.76191r nn A == 其方向箭头向上↑。
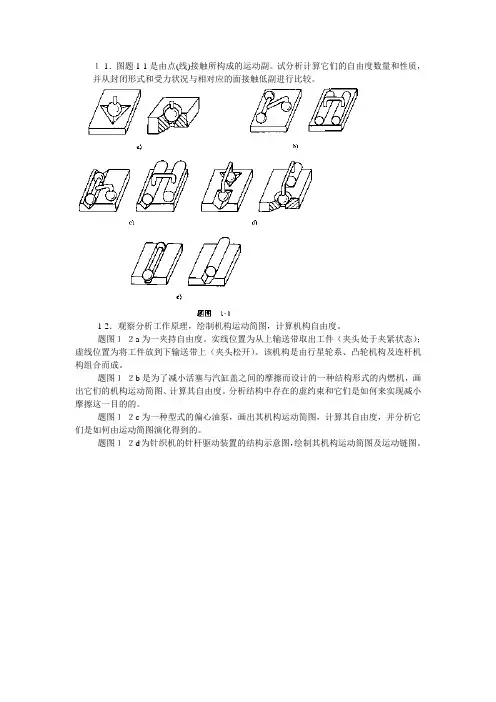
1-1.图题1-1是由点(线)接触所构成的运动副。
试分析计算它们的自由度数量和性质,并从封闭形式和受力状况与相对应的面接触低副进行比较。
1-2.观察分析工作原理,绘制机构运动简图,计算机构自由度。
题图1-2a为一夹持自由度。
实线位置为从上输送带取出工件(夹头处于夹紧状态);虚线位置为将工件放到下输送带上(夹头松开)。
该机构是由行星轮系、凸轮机构及连杆机构组合而成。
题图1-2b是为了减小活塞与汽缸盖之间的摩擦而设计的一种结构形式的内燃机,画出它们的机构运动简图、计算其自由度。
分析结构中存在的虚约束和它们是如何来实现减小摩擦这一目的的。
题图1-2c为一种型式的偏心油泵,画出其机构运动简图,计算其自由度,并分析它们是如何由运动简图演化得到的。
题图1-2d为针织机的针杆驱动装置的结构示意图,绘制其机构运动简图及运动链图。
1-3.用公式推导法,求出F=1、N=10的单铰运动链的基本结构方案以及它们的单铰数和所形成的闭环数k,并从中找出图1-17所示的双柱压力机构简图所对应的运动链。
1-4.计算下列各机构的自由度。
注意分析其中的虚约束、局部自由度合复合铰链等。
题图1-4a为使5、6构件能在相互垂直方向上作直线移动的机构,其中AB=BC=CD=AD。
题图1-4b为凸轮式4缸活塞气压机的结构简图,在水平和垂直方向上作直线运动,其中仍满足AB=BC=CD=AD。
题图1-4c所示机构,导路AD⊥AC、BC=CD/2=AB。
该机构可有多种实际用途,可用于椭圆仪,准确的直线轨迹产生器,或作为压缩机或机动马达等。
题图1-4d为一大功率液压动力机。
其中AB=A`B`,BC=B`C`,CD=C`D`,CE=C`E`,且E、E`处于滑块移动轴线的对称位置。
1-5采用基本杆组法综合运动链和机构。
1)试用Ⅱ级和Ⅲ级基本杆组,综合出如下的瓦特杆链和斯蒂芬逊6杆链。
2)取题图1-5b、stephenson6杆链中的不同构件为机架和原动件,得出不同级别、不同组合方式得机构。
第一章复习题一、思考题1.机器有哪些特征?2.机构有哪些特征?3.构件的定义是什么?4.自由度的定义是什么?5.约束的定义是什么?6.一个平面自由运动构件有几个自由度?7.平面运动副的构成条件是什么?8.何为高副?何为低副?9.平面低副有几个约束?平面高副平面低副有几个约束?10.何为平面机构?11.运动副有哪些封闭方式?12.运动链如何定义?13.运动链如何分类?14.运动链成为机构的条件是什么?15.何为机架、原(主)动件、从动件?16.机构示意图和机构运动简图的区别是什么?17.机构具有确定运动的条件是什么18.复合铰链如何定义?19.若有m 个构件,则有几个转动副?20.何为局部自由度?21.何为虚约束(消极约束)?22.联接点与被联接点轨迹重合如何处理(举例说明)?23.如何处理复合移动副?24.如何处理复合转动副?25.运动时,两构件上的两点距离始终不变,如何构造虚约束?26.如何处理对运动不起作用的对称部分?27.复合高副构成虚约束的几何条件是什么?28.六杆运动链有哪2种类型?29.替代构件有哪两种?30.高副低代原则是什么?31.高副低代方法是什么?32.平面低副机构组成原理是什么?33.机构组成原理有哪两个限制条件?34.描述原动链画法?35.基本组定义是什么?36.基本组结构公式是什么?37.描述关于基本组的3个常识。
38.为什么说将Ⅳ级组划分成两个Ⅱ级组是错误的?39.何为基本组的串联、并联和混联?40.为什么不能将杆组的各个外端副连在同一个构件上?41.何为机构级别?42.验证拆组是否正确的标准是什么?43.何为简单机构?何为复杂机构?44.Ⅲ级杆组应由几个构件和几个运动副组成?二、作图题画出图1-1所示机构的运动简图。
图1-1三、分析题验算图1-2所示机构能否运动,如果能运动,看运动是否具有确定性,并给出具有确定运动的修改办法。
图1-2四、计算题计算图1-3所示机构自由度。
第六章 轮系及其设计计算及分析题1、已知:Z 1=30,Z 2=20,Z 2’=30,Z 3 = 25,Z 4 = 100,求i 1H 。
2、图示轮系,已知各轮齿数Z 1=18,Z 2= Z 4=30,Z 3=78,Z 5=76,试计算传动比i 15。
3、在图示轮系中,已知各轮齿数为Z 1=Z 3=30,Z 2=90,Z 2’=40,Z 3’=40,Z 4=30,试求传动比i 1H ,并说明I 、H 轴的转向是否相同?4、在图示轮系中,已知各轮齿数为Z 1 =15,Z 2=20, Z 2’ = Z 3’= Z 4=30, Z 3=40,Z 5= 90,试求传动比i 1 H ,并说明H 的转向是否和齿轮1相同?I ’5、在图示轮系中,已知各轮的齿数为Z1= 20,Z2=30,Z3=80,Z4=25,Z5=50,试求传动比i15。
6、在图示轮系中,已知各轮齿数为Z1=19,Z2=76,Z2’= 40,Z3=20,Z4= 80,试求传动比i1H。
7、在图示轮系中,已知各轮齿数为Z1= 20,Z2’= 25,Z2= Z3=30,Z3’= 20,Z4=75,试求:(1)轮系的传动比i1H。
(2)若n1=1000r/min,转臂H的转速n H=?8、已知图示轮系中各轮的齿数Z1=20,Z2=40,Z3=15,Z4=60,轮1的转速为n1=120r/min,转向如图。
试求轮3的转速n3的大小和转向。
9、在图示轮系中,已知各轮齿数为Z1= Z3= Z4=20,Z2=40,Z5= 60,n1 = 800r/min,方向如图所示,试求n H的大小及转向。
10、在图示轮系中,已知各轮齿数为Z1=16 ,Z2=24,Z2’= 20,Z3=40,Z3’= 30,Z4= 20,Z5=70试求轮系的传动比i1H。
11、在图示轮系中,已知各轮齿数为Z 1= 15,Z 2=25,Z 2’= 20,Z 3=60,Z 4=10,Z 5=30,n 1=200r/min ,n 3=50r/min ,试求n 1、n 3转向相反时,n 5=?。
里厌大华试卷教务处06版第丨页共2贞重次大学200 -200译程甙春学年第学期似卷CB卷开课学院:考试日期:题号一二三四五六七八九十总分得分考试方式:E开卷E闭卷C其他考试时间:分钟—、机构结构分析(20分)1.图la所示运动链,要满足什么条件才能成为机构?请在该阁上标出所指定的机架和原动件。
a,A'2.图n>所示精压机运动简图,其输出构件为宽度很大的压头(滑块)G/。
己知:F、人及£、7/铰链中心的位置分别为/JC■连线对称,R 脉EF, DHU HI=EG,试回答下列问题:(1)该机构中是否存在虚约束?如果有,则该虚约束存在于何处?并说明采用该虚约束结构的目的。
⑵计算该机构的自由度,并指明其原动件。
(3)对去掉虚约束后的机构运动简图迸行结构分析,拆出其基本杆姐,判别该机构的级别。
二、连杆机构分析(25分)1.图2所示运动链,己知i AB<^BC(1)说明该运动链中是否存在能作相对整周转动的构件,若冇,是哪些构件?(2)如果想得到原动件作整周转动,而从动件能分别作往复摆动和整周转动的两种机构,则该如何分别选择其机架、原动件和从动件?2.图3所示为“插床机构简图,己知L A B=W0mm, L BC=U0mm,L DE= 180mm。
BC为原动件,顺时针方向转动,滑块5为输出构件,且儿B、C三点在一直线上。
(1)前置四杆机构ABC属于哪••种机构?(2)作出滑块5上£点的左、右极限位置&、£2及对应的M、仍和C’I、C2的位置。
滑块的行程S等于多少?(3)当滑块由E、运动到E>,及从E2运动到时,作出主动曲柄的对应转角釣和约,并写出该机构行程速度变化系数K的表达式。
阁3命题人:组题人:•■中题人:命题吋间:重庆大学试卷教务处06版 第2页共2页三、凸轮机构分析(15分) 图4所示为一对心式直动从动件盘形凸轮机构。
己知偏心圆盘凸轮的半径 7?=40mm»滚子半径r^lOmm,偏心距a4=25mm,凸轮逆时针方向转动。
5轮系5.1轮系的分类依据是什么?5.2惰轮起什么作用?5.3 蜗轮蜗杆转向判断方法是什么?5.4 什么是周转轮系转化轮系?5.5 如何判断周转轮系主从动件的转向关系?5.6 正、负号机构,哪种效率高?5.7 同心条件应满足的公式是什么?5.8 试确定图5-1a中蜗轮的转向,及图5-1b中蜗杆和蜗轮的螺旋线的旋向。
(a)(b)图5-15.9图5-2所示为一手摇提升装置,已知各轮齿数为:z1=20,z2=50,z3=15,z4=30,z6=40,z7=18,z8=51,蜗杆z5=1,右旋,试求传动比i18并确定提升重物时手柄的转向。
图5-25.10 图5-3所示为一灯具的转动装置,已知:n1=19.5r/min,方向如图示,各轮齿数为:z1=60,z2=z2'=30,z3= z4=40,z5=120。
求灯具箱体的转速及转向。
5.11 在图5-4所示的自行车里程表机构中,C为车轮轴,P为里程表指针。
已知各轮齿数为:z1=17,z3=23,z4=19,z4'=20,z5=24。
设轮胎受压变形后车轮的有效直径为0.7m,当自行车行驶1km时,表上的指针刚好回转一周。
试求齿轮2的齿数。
图5-3图5-45.13 在图5-5所示的双螺旋桨飞机的减速器中,已知:z1=26,z2=20,z4=30,z5=18,n1=15000r/min,求螺旋桨P、Q的转速n P、n Q及转向。
5.10 在图5-6所示的电动三爪卡盘复合轮系中,设已知z1 =6,z2 =z2'=25,z3=57,z4 =56。
试求传动比i14。
5.14 图5-7所示的变速器,已知:z1= z1'= z6=28,z3= z5= z3'=80,z2=z4= z7=26,当鼓轮A、B、C分别被制动时,求传动比i1H。
图5-5图5-7图5-6。
一、简答题简答题((20分)1. 运动、制造;3、6;限制、保留;约束、Ⅰ、Ⅴ。
2. 两个以上构件通过运动副的连接而构成的构件系统称为运动链。
k =p +1−N 。
在运动链中将某一构件固定,让另一个(或几个构件)按给定运动规律相对于该固定构件运动,若运动链中其余构件都能得到确定的相对运动,则此运动链成为机构。
3. 基本杆组是不可再分的自由度为零的构件组。
常用的基本杆组有RRR 组、RRP 组和RPR 组。
其典型结构分别为:n =7,p L =10,F =3×7−2×10=1。
Ⅲ级机构。
二、机构运动分析及静力分析机构运动分析及静力分析((25分)1. v E =ED ⋅ω3µl ,由11613l 33613l P P P P ωµωµ=得到:1613E 1l 3613P P v DE P P ωµ=⋅,方向如图示。
2. v F = v E + v FE大小 ? √ ? 方向 水平√ ⊥FEP 13pfe3.三、连杆机构设计连杆机构设计((15分)取µl =0.01m/mm 作图,量得:L AB =µl (AC 2−AC 1)/2=76mm ,L BC =µl (AC 2+AC 1)/2=355mm ,L DE =µl DE =392mm , L EF =µl EF =160mm 。
四、凸轮机构分析凸轮机构分析((15分) 其基本运动学参数有推程角Φ、远休止角Φs 、回程角Φ′、近休止Φ′s 以及从动件的位移s 、速度v 、加速度a 和跃度j ,角其基本尺寸有基圆半径r b ,中心距L 和摆杆长l 。
为便于设计,常先选定基圆半径和中心距。
1. 压力角如图示。
2. R =r +r r ,r b =r −e +r r 。
3. 分别以R +e 和r b 为半径,以O为圆心画圆弧,与以摆杆长为半径,以A 为圆心的圆弧相交于B 1和B 2点,即可确定摆杆的极限位置如图所示。
5轮系
5.1轮系的分类依据是什么?
5.2惰轮起什么作用?
5.3 蜗轮蜗杆转向判断方法是什么?
5.4 什么是周转轮系转化轮系?
5.5 如何判断周转轮系主从动件的转向关系?
5.6 正、负号机构,哪种效率高?
5.7 同心条件应满足的公式是什么?
5.8 试确定图5-1a中蜗轮的转向,及图5-1b中蜗杆和蜗轮的螺旋线的旋向。
(a)(b)
图5-1
5.9图5-2所示为一手摇提升装置,已知各轮齿数为:z1=20,z2=50,z3=15,z4=30,z6=40,z7=18,z8=51,蜗杆z5=1,右旋,试求传动比i18并确定提升重物时手柄的转向。
图5-2
5.10 图5-3所示为一灯具的转动装置,已知:n1=19.5r/min,方向如图示,各轮齿数为:z1=60,z2=z2'=30,z3= z4=40,z5=120。
求灯具箱体的转速及转向。
5.11 在图5-4所示的自行车里程表机构中,C为车轮轴,P为里程表指针。
已知各轮齿数为:z1=17,z3=23,z4=19,z4'=20,z5=24。
设轮胎受压变形后车轮的有效直径为0.7m,当自行车行驶1km时,表上的指针刚好回转一周。
试求齿轮2的齿数。
图5-3
图5-4
5.13 在图5-5所示的双螺旋桨飞机的减速器中,已知:z1=26,z2=20,z4=30,z5=18,
n1=15000r/min,求螺旋桨P、Q的转速n P、n Q及转向。
5.10 在图5-6所示的电动三爪卡盘复合轮系中,设已知z1 =6,z2 =z2'=25,z3=57,z4 =56。
试求传动比i14。
5.14 图5-7所示的变速器,已知:z1= z1'= z6=28,z3= z5= z3'=80,z2=z4= z7=26,当鼓轮A、
B、C分别被制动时,求传动比i1H。
图5-5
图5-7图5-6。