车牌识别系统地感
- 格式:docx
- 大小:12.80 KB
- 文档页数:2

车牌识别系统安装调试说明随着车牌识别系统的普及,车牌识别系统的安装和调试也成为很多工程商关注的话题,如何使车牌识别更好的发挥其作用,依据现场情况做好车牌识别系统的安装和调试是必须要了解的,安快小编依据工程师多年安装经验汇总了如下几点标准,希望对您有帮助。
一、安快车牌识别系统如何在安全岛施工安全岛主要用于设备安装,以及防水、防撞。
一般做在出入通道中间。
【根据现场情况确定】宽度:如岛上同时放置岗亭的话,一般在1200mm---1500mm;如果安全岛只是安装设备,宽度约在60mm---80mm左右,设备固定位置距离安全岛边缘100mm左右。
长度:安全岛的长度约在5000mm--6000mmm左右。
高度:安全岛一般应高出地面150mm--200mm。
没有安全岛时,要做设备基础,设备安装的地方为水泥地面时,(与安全岛一样)以星型50cm左右打一个Φ10X100规格的膨胀螺栓。
地面不低于5cm,并预埋、固定设备线管,位置正确后就可以浇灌混凝土了。
如果安全岛做在有坡度的地面,用水平仪找平,呈阶梯状。
安全岛设备安装注意事项:如果道闸对开时,2个设备基础高度应在同一水平线上。
设备基础和安全岛表面抹灰处理:横平竖直,整齐美观。
如果贴砖就不用抹灰。
二、布管与穿线1、水泥地面开槽深度:线管放置后上部表面距离地面不低于4cm,2管间有1cm缝隙,以便于水泥浇灌后,车辆过压线管无动弹,路面结实不损坏管线。
2、土壤地面开槽:深度大于10cm,管面距离地面不低于5cm;转角处用弯管器弯曲成型、直通接头连通;不允许使用三叉接头,直角接头;线管内所穿导线面积不超过内孔截面的50%。
3、防水处理:埋设管道深度不少于10cm,进入机箱设备后预留5cm左右;管与管连接处刷胶水后连接;强电,弱电分开铺设;对有强磁干扰的场所,采用镀锌钢管做接地处理。
三、地感线圈施工一般规格:1m*2m【大型车辆由实际情况确定】使用0.75铁氟龙线,绕线4--5圈。

车牌识别停车场系统一、介绍车牌识别停车场系统就是利用OCR算法通过摄像头视频流或抓拍图片识别出字符车牌号从而达到验证车牌号的过程,在环境符合的条件下白天识别率能接近99.7%,汉字能到达99% ,夜间由于能达到98% .但绝对不存在100%的情况,只能说在环境符合的情况下接近100%。
(如图)。
二、应用领域停车场,高速公路,公路卡口等环境。
三、识别方式1.硬识别:由摄像头完成识别并将识别结果通过网络传输给上位机(电脑)进行逻辑处理。
2.软识别:由摄像头提供视频流或抓拍图片传输给上位机,再由上位机识别车牌号进出逻辑处理。
3.两者对比:➢从网络结构上分析,硬识别属于分布识别处理,软识别属于集中处理。
对应连接多摄像头而言硬识别处理速度更快。
➢硬识别摄像机型号及参数由厂家设置,安装时只需简单调整参数。
➢软识别需自己采购摄像机及镜头型号并手动配置焦距和其它大量参数。
➢对于软识别更容易修改并扩展功能并升级高配置摄像头及镜头适应不同环境。
➢对应停车场来说高清摄像130万像素,镜头3-10米识别范围足以满足需求,并将控制板与摄像头结合,这样安装相对简单,软识别需外置控制板抬杆,所以硬识别安装简单。
➢从本质上分析:如果两者没有太大区别都是采用相同ocr算法。
四、常见问题1.如果你是外采购摄像机+软件识别需要注意下面几点➢夜间识别率下降:⏹摄像机镜头不符合要求:车场镜头要求1/2。
7英寸+2mp+2.8-12mm 手动变焦+F1。
4光圈(距离3-10米)5—25mm(20米)。
⏹摄像机曝光参数:调整到1/180至1/250 ms 对应(5—4ms)⏹补光灯亮度:根据现场环境调整。
⏹车牌过曝:补光灯不能直射车牌。
➢车速过快无法识别:⏹加减速带:停车场摄像机正常车速在20迈左右,10迈内效果最好,车速过快可通过加减速带解决。
⏹曝光参数调小:调整到1/180至1/250ms对应(5—4ms)2.如果你是硬识别一体机➢夜间车身无法看清⏹加外置补光灯不要直射车牌。

车牌识别系统常见问题答疑一、立体高清车牌识别系统车牌图像匹配方法?______________________________________ 2二、立体高清车牌识别软件中的“全字”“严格”“较高”“中等”对车牌的实际匹配值?____ 2三、“无车牌”或“车牌难以辨识”的问题___________________________________________ 3四、天气条件变化,识别环境恶劣的问题____________________________________________ 3五、摄像机抓拍的照片能保存多长时间?____________________________________________ 4六、摄像机是否可以从100万像素升级为300万像素?________________________________ 4七、高清摄像机是否可以接闪光灯?________________________________________________ 5八、高清抓拍摄像机的抓拍距离是多少?____________________________________________ 5九、高清摄像机跨网段使用的问题__________________________________________________ 5十、关于录像码流的问题__________________________________________________________ 5 十一、立体高清车牌识别系统是否支持混进混出模式?满足什么条件才可以安装?_________ 6 十二、立体高清车牌识别系统(双摄像机)需要满足什么要求才可以安装? ______________ 9 十三、嵌入式高清车牌识别系统(单摄像机)需要满足什么要求才可以安装? ___________ 12 十四、车牌识别系统如何减少跟车现状?___________________________________________ 14 十五、如果车牌识别摄像机不工作?请按照以下步骤检测_____________________________ 17 十六、网络断网问题?___________________________________________________________ 18一、立体高清车牌识别系统车牌图像匹配方法?1、相同车牌完全相同的车牌直接匹配,岗亭程序“出口通道”与“对应入场”窗口显示匹配的图片结果。

停车场收费系统的识别模式说明停车场收费系统的识别模式,识别模式分为三种:地感识别、视频识别、地感+视频识别地感模式:特点:1)需要施工安装地感2)工作方式:触发后,才会识别,然后上传3)结果输出:车辆在识别区域内,识别出结果,就输出4)处理时间:大概500ms~1000ms之间注意事项:1.地感线圈的安装位置与相机的垂直距离为3.5-5米,推荐距离相机4m2.车牌识别的最小宽度和最大宽度默认使用80~400(像素),以保证识别率;如果确认车牌宽度在80~200(像素)之间,可以设置最小宽度为80,最大宽度200(像素),较小的宽度范围会使识别速度得到一定程度提高。
3. 车牌的类型可以根据现场的实际需求进行增减;设置的类型越多,识别速度会相应变慢。
4.如地感模式下输出区域不起作用,可以调节识别区域,通过识别区域屏蔽栅栏或其他有影响识别率的事物,但要使车辆经过时车牌在识别区域内部。
视频识别:特点:1)无需安装地感,但有输出区域控制输出2)工作方式:来车识别区域先识别,然后在输出区域识别到输出3)结果输出:输出区域内识别到才输出4)处理时间:和现场安装情况有关注意事项:1)输出区域的高度不低于整幅图像的1/3;2)如果现场有较多大型卡车出入,车牌位置相对较高,可以适当将输出区域的上边沿调节高一些;3)可根据现场情况,选择不同的输出区域,以屏蔽栏杆等障碍物,同时能够防止跟车时输出多个识别结果;4)在输出区域上边沿线处,车牌宽度应保持在110-140像素,宽度过小可能会导致误识别,宽度过大可能无法识别出结果5)视频识别时车牌必须是运动的,静止的图像无法进行识别;6)视频识别夜间补光灯常亮;7)同一张车牌不能在短时间识别两次,至少应该保持三十秒的时间间隔才能再次识别同一张车牌;8)在安装相机的时候需要注意,请尽可能保持车牌图像出现在整幅图像的下半部分,相对于车牌在图片上半部分,识别速率会提升很多。
地感+视频识别:特点:1)需要安装地感,输出区域也控制输出2)工作方式:来车识别区域先识别,然后在输出区域识别到,地感触发输出识别结果注意:在车辆进输出区域前,提早触发,即使识别到车牌也输出无牌车(防止跟车问题)所以,使用此模式,地感位置不能装的太远,距离相机3米最合适。
地感线圈施工规范车辆检测器的地感线圈是停车场管理系统中的重要部件,它的工作稳定性直接影响整个系统的运行稳定性,因此地感线圈的制作是工程安装过程中很重要的一个工作环节。
制作地感线圈前要考虑以下几点:⑴线圈材料在理想状况下(不考虑一切环境因素的影响),电感线圈的埋设只考虑面积的大小(或周长)和匝数,可以不考虑导线的材质。
但在实际工程中,必须考虑线导线的机械强度和高低温抗老化问题,在某些环境恶劣的地方还必须考虑耐酸碱腐蚀问题。
由于导线一旦老化或抗拉伸强度不够导致导线破损,则检测器将不能正常工作。
在实际的工程中,建议采用1.0mm以上铁氟龙高温软导线。
⑵线圈形状①矩形安装通常探测线圈应该是长方形。
两条长边与金属物运动方向垂直,彼此间距推荐为1米。
长边的长度取决于道路的宽度,通常两端比道路间距窄0.3米至1米。
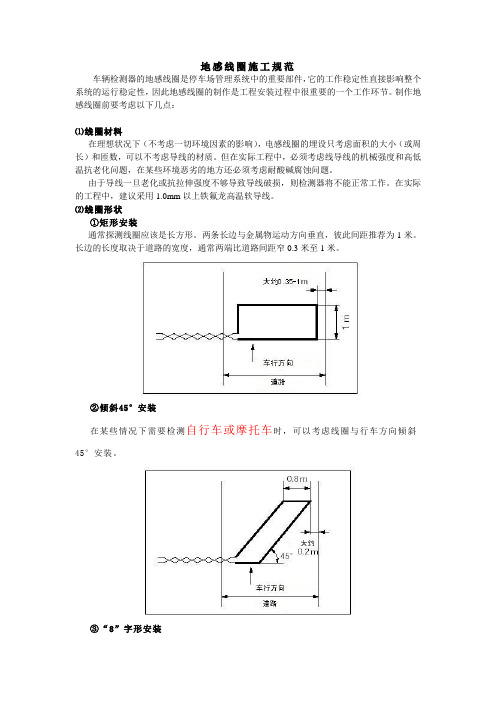
②倾斜45°安装在某些情况下需要检测自行车或摩托车时,可以考虑线圈与行车方向倾斜45°安装。
③“8”字形安装在某些情况下,路面较宽(超过六米)而车辆的底盘又太高时,可以采用此种安装形式以分散检测点,提高灵敏度。
这种安装形式也可用于滑动门的检测,但线圈必须靠近滑动门。
⑶线圈的匝数为了使检测器工作在最佳状态下,线圈的电感量应保持在100uH-300uH之间。
在线圈电感不变的情况下,线圈的匝数与周长有着重要关系。
周长越小,匝数就越多。
一般可参照下表:由于道路下可能埋设有各种电缆管线、钢筋、下水道盖等金属物质,这些都会对线圈的实际电感值产生很大影响,所以上表数据仅供用户参考。
在实际施工时用户应使用电感测试仪实际测试电感线圈的电感值来确定施工的实际匝数,只要保证线圈的最终电感值在合理的工作范围之内(如在100uH—300uH之间)。
⑷输出引线在绕制线圈时,要留出足够长度的导线以便连接到环路感应器,又能保证中间没有接头。
绕好线圈电缆以后,必须将引出电缆做成紧密双绞的形式,要求最少1米绞合20次。

xxxx车牌自动识别系统方案书伊兰度车牌识别亮点:其方便没有临时车的单位或小区;99%以上;伊兰度车牌识别优势对比:第一章背景随着我国机动车增长速度的加快,停车场管理系统已经被广泛的应用起来,使车辆管理更加科学化,正规化。
经过几年的推广应用,在广泛使用的同时,也发现了一些弊端和漏洞一、月租卡与车无法准确对应,无法实现真正的一车一卡现有系统,当月租用户刷卡出入车场时,无法自动判定该卡是否对应该车,这样就造成了,用户卡片随意互借,丢失计时卡,车辆数目不准确,用不法手段获取他人月租卡进行高档车辆盗窃的严重安全隐患。
二、临时卡无法自动录入车牌现有系统,当临时卡用户进入车场时,无法自动在数据库中存储牌照号,这样在查询停车场中某辆临时停放车辆的进出情况时,会变得非常麻烦,无法快速查找。
需要依次调取所有进入车辆图片进行人工辨别。
同时也无法对离场临停车辆进行车牌和卡片的双重验证,同样也存在安全隐患。
三、车辆进出效率低下。
现在小区规模越来越大,业主车辆越来越多,在经过停车场管理系统刷卡验证时,经常会出现业主找卡,忘记带卡,刷卡时无法靠边的情况,这样就严重影响了通行速度,造成车辆拥堵。
在上下班高峰期的时候这种情况尤其严重。
针对以上的系统弊端和漏洞,我公司通过多年的技术研发和验证测试,推出了目前最先进的车牌自动识别系统,作为停车场系统的子系统,通过计算机的图像处理自动识别记录车牌,辨别同一车牌的车辆出入场时是否一致,是目前识别速度最快的硬件车牌识别系统。
其软件模块可以嵌入到停车场系统软件中,配合硬件共同实现车牌自动识别功能,使停车场系统更加完善精确。
在智能交通系统中,车牌自动识别系统是一个非常重要的发展方向,车牌自动识别系统正是在这种应用背景下研制出来的能够自动实时地检测车辆经过和识别汽车牌照的智能交通管理系统。
第二章关于车牌识别技术车牌识别技术(License Plate Recognition,LPR)以计算机技术、图像处理技术、模糊识别为基础,建立车辆的特征模型,识别车辆特征,如车牌、车型、颜色等。
车牌识别系统调试配置说明教程「图文视频」-微科智控车牌识别系统调试配置说明教程【图文视频】获取视频信息失败一、车牌识别系统调试前准备工作1、将电脑IP地址和相机设置为相同的网段;2、关闭防火墙3、车牌识别系统安装调试工具二、车牌识别系统识别区配置按照车辆进出车场的行车路线,将车辆停放于距离车牌识别相机3.5-4.5m的位置,通过调节车牌识别的万向节,将车牌定位于相机画面的中下部2/5的位置,车牌需与画面保持水平,然后通过拉动画面中的触发框节点,进行识别区设定,在配置识别区时建议识别区上限不超过画面的中线,触发区整体高度约为画面整体高度的1/3,触发区尽量排除掉遮挡物;三、车牌识别系统相机主要参数配置1、修改IP:根据设备所处的内网进行IP配置,在确定IP前可使用PING工具排查IP是否被占用;在配置完设备IP后,建议在路由中进行MAC地址和IP绑定操作,避免内网中IP冲突;2、车牌识别系统触发方式:默认视频触发,如果现场采用地感触发则选择地感触发3、车牌识别系统优先城市:根据车牌识别系统所在地选择省份简称4、车牌识别系统场景选择:正常没有明显顺光或逆光的环境中,选择正常地面出入口;如果有地库出入口光线长时间较暗的环境,可选择地库出入口;有明显顺光和逆光的环境,可选择常规顺光;极端顺利光通常不选择,朋友们在做规划是也需要避免有极端顺逆光环境;在此项配置完成后,经过一段时间后可检查全天各时段的识别结果,再进行配置的微调;5、车牌识别系统安装距离:在配置好识别区后,根据安装距离选择合适的安装距离,然后再进行实际行车识别测试,如果界面识别结果为红色,且提示像素过大,则配置的安装距离需要增大,如提示过小,则需要减小配置的安装距离,直到识别结果显示正常;6、车牌识别系统来车方向:常规应用场景中“从上至下”是应用得最多的模式,即车辆从上方进入画面后,车牌识别系统开始识别车牌,当车牌进入识别区时,车牌识别系统输出识别结果;在进出车道分开的场景中,可使用“双向”模式,这样在后车跟车很近没有被识别的情况下,车辆在倒车进入识别区时即可触发识别结果,相对于从上到下的模式,车辆需移动的距离更短,可以提升通行效率;7、车牌识别系统相机补光灯设置:通常设定为日夜自动切换,通过光线感应模块来自动开启和关闭补光灯,也更可以根据现场需求设定为常亮和常灭,如果是地库长暗的环境,可设定为常量;也可以根据时间段来设定补光灯开启和关闭;四、车牌识别系统屏显协议和波特率需要根据根据屏显控制卡来配置,按厂家提供的参数提供配置即可;五、车牌识别系统相机时间同步本文完~~~~~。
车牌识别地感线圈工作原理今天咱就来唠唠车牌识别系统里那个超神奇的地感线圈到底是咋工作的。
你看啊,地感线圈这东西,就像一个特别聪明又低调的小侦探,默默地在地上发挥着大作用。
地感线圈呢,其实就是在地面上绕了几圈电线,就这么简单的一个小圈圈,但是可别小瞧它哦。
当有车靠近的时候,就像是一场特别的魔法要开始了。
地感线圈周围有磁场,车呢,是金属做的,金属这个东西啊,就像一个调皮的小捣蛋鬼,它一进入到这个地感线圈的磁场范围里,就会让这个磁场发生变化。
这变化就像是平静的湖水里突然扔进去了一颗小石子,泛起了层层涟漪一样。
这种磁场的变化就被地感线圈检测到啦。
这时候,地感线圈就赶紧把这个消息传递出去。
就好比它在大喊:“有车来啦,有车来啦!”然后这个消息就传给了车牌识别系统里的其他小伙伴,像是控制器之类的。
那你可能会问了,这磁场变化咋就能知道是车呢?这就像是地感线圈有自己的小秘密一样。
它能区分出这种磁场变化是因为金属物体的靠近,而且根据这个变化的特征,就能判断出来是车这种比较大的金属物体,而不是什么小铁钉之类的东西。
要是小铁钉也能让它大惊小怪的,那这地感线圈可就太不专业啦。
再说说这个地感线圈和车牌识别的关系吧。
它就像是车牌识别的小助手,先给车牌识别系统打个小报告,说有车来啦,做好准备哦。
然后车牌识别系统就可以启动摄像头之类的设备,开始寻找车的车牌在哪里。
如果没有地感线圈这个小助手先通报一声,那车牌识别系统可能就会像个没头的苍蝇一样,不知道什么时候该工作呢。
而且啊,地感线圈还能做很多有趣的事情。
比如说,在停车场里,它可以帮助计算车的进出时间。
车进来的时候它感应到了,等车出去的时候它又感应到了,这样就能算出车在停车场里停了多久,然后就可以根据这个时间来收费啦。
这就像是一个小小的时间记录员,特别精准呢。
还有哦,地感线圈在交通管理方面也有很大的用处。
在路口的时候,它可以感应到车的到来,然后帮助交通信号灯调整时间。
如果车多了,就可以让绿灯的时间长一点,让车顺利通过。
高清车牌识别系统解决方案目录一、脱机型车牌识别系统优势------------------------------------------------------- 3二、脱机型车牌识别系统组成------------------------------------------------------- 52.1系统拓扑图 ---------------------------------------------------------------- 62.2系统流程 ------------------------------------------------------------------ 6三、智慧眼ZY-S1618功能简介 ----------------------------------------------------- 8四、施工与软件配置-------------------------------------------------------------- 124.1视频流触发识别的施工要求 ------------------------------------------------- 124.2压地感触发识别的施工要求 ------------------------------------------------- 134.3软件配置 ----------------------------------------------------------------- 14五、软件特色功能简介------------------------------------------------------------ 185.1车牌修改 ----------------------------------------------------------------- 185.2手动输入车牌入场或者出场 ------------------------------------------------- 185.3无牌车出入场 ------------------------------------------------------------- 195.4出场模糊查询 ------------------------------------------------------------- 205.5固定车脱机车牌下载 ------------------------------------------------------- 215.6脱机车牌下载至摄像机 ----------------------------------------------------- 225.7黑名单功能 --------------------------------------------------------------- 235.8 车牌登记---------------------------------------------------------------- 235.9车牌打折 ----------------------------------------------------------------- 245.10掌上停车APP ------------------------------------------------------------ 255.11自助缴费 ---------------------------------------------------------------- 26六、主要设备技术参数------------------------------------------------------------ 286.1停车场主控制板(S011E) ----------------------------------------------------- 286.2网络摄像机 --------------------------------------------------------------- 29一、脱机型车牌识别系统优势采用高清车牌识别摄像机对进入停车场的车辆进行车牌识别、图像抓拍,将车牌信息传输给专用控制器,再上传给电脑、引导车辆进入,并保存记录;在停车场出口通过高清车牌识别摄像机对驶出的车辆进行车牌识别、图像抓拍,在线状态通过计算机判断,对固定车自动放行,脱机状态有停车场控制器判断,对固定车辆放行,并保存记录,如果系统中有语音和显示屏,会驱动其播报和显示车辆信息。
车牌识别系统地感
产品名称:高清车牌识别系统
产品型号:DH-LPR200
产品参数:高清车牌识别系统(200万CCD、地感线圈触发、车牌识别、视频一体机)
一、系统概述
高清车牌识别系统(地感线圈)采用200万像素CCD传感器的高清摄像机与线圈车辆检测器相结合工作的模式对经过干道的机动车辆进行自动拍照记录,车辆检测器采用地感线圈检测,一旦有车辆通过,即产生触发信号,高清车牌识别抓拍一体机对过往的车辆进行拍照取证,夜间启动闪光灯(LED补光灯)进行补光,形成执法证据照片。
每张图片都可清晰地反映出车辆相关信息,包括机动车的外形、特征、号牌、驾乘人脸像等要素,及通过时间等信息。
本系统抓拍率高、稳定可靠,抓拍图片清晰,证据完整。
支持抓拍包括摩托车的所有机动车辆。
二、技术参数
●高清车牌识别抓拍一体机为双DSP嵌入式一体化结构、系统稳定可靠,功耗低,最大功耗不超过10瓦。
●前端路口无需配置工控机,通过网络传输,只需增加数据储存电脑,高清车牌识别抓拍一体机集成了图像、控制、抓拍、存储、传输模块,系统更稳定。
●车牌识别模块集成在摄像机中、系统更加稳定可靠、更加简单。
●直接通过高清视频检查,准确率高,系统结构更加简单。
●连续高清视频流,每秒达到25fps,双码流,支持高清抓拍、高清录像,并输出一路摸拟视频BNC。
●高清晰CCD数字成像,图像分辨率达1600×1200或1920×1080。
全天候辨别车辆特征、车牌号码及路口环境。
●灵活的信息叠加:前端抓拍照片直接叠加信息,包括路段名称、抓拍时间、车牌号码、车牌颜色、方向、设备IP、车道号、违章信息等。
●实用性强,具备开放性和标准性。
三、系统功能
■车牌识别系统抓拍张数:1张全景以上(可根据实际要求设置抓拍1-4张)■车辆抓拍率:≥99%(白天),≥99%(夜间)
■图片有效率:≥99%(白天),≥99%(夜间)
■车牌识别率:≥97%(白天),≥95%(夜间)
■适应车速范围:5~220公里/小时
■速度检测精度:≤±2%
■数据格式:单张图片分辨率1600×1200或1920×1080,JPEG压缩比可调■夜间补光:气体闪光灯、LED频闪灯、LED补光灯
■闪光灯控制:3路
■系统响应时间:≤200毫秒
■检测方式:地感线圈,前端。
■地感线圈接入:4路
■车辆检测器灵敏度:16级可调
■单台摄像机可拍摄车道范围:1~2车道
■车牌识别方式:高清卡口一体机内置车牌识别,前端。
■数据接口:100M以太网接口
■数据上传:FTP远程上传
■存储图像容量:受SD卡容量限制,8GB SD卡约可存4万张
■
摄像机触发车检器通讯方式:I/O或RS485
■抓拍信号触发位置:进线圈一、离线圈一、进线圈二、离线圈二。