基于Simulink仿真双闭环系统综合课程设计
- 格式:doc
- 大小:443.00 KB
- 文档页数:17
双闭环直流电机调速系统的SIMULINK仿真实验魏小景张晓娇刘姣(自动化0602班)摘要:采用工程设计方法对双闭环直流调速系统进行设计,选择调节器结构,进行参数的计算和校验;给出系统动态结构图,建立起动、抗负载扰动的Matlab Simulink 仿真模型.分析系统起动的转速和电流的仿真波形 ,并进行调试 ,使双闭环直流调速系统趋于合理与完善。
关键词:双闭环调速系统;调节器;Matlab Simulink建模仿真1.引言双闭环直流调速系统是目前直流调速系统中的主流设备,具有调速范围宽、平稳性好、稳速精度高等优点,在理论和实践方面都是比较成熟的系统,在拖动领域中发挥着极其重要的作用。
由于直流电机双闭环调速是各种电机调速系统的基础,直流电机双闭环调速系统的工程设计主要是设计两个调节器。
调节器的设计一般包括两个方面:第一选择调节器的结构,以确保系统稳定,同时满足所需的稳态精度. 第二选择调节器的参数,以满足动态性能指标。
本文就直流电机调速进行了较系统的研究,从直流电机的基本特性到单闭环调速系统,然后进行双闭环直流电机设计方法研究,最后用实际系统进行工程设计,并采用Matlab/Sim-ulink进行仿真。
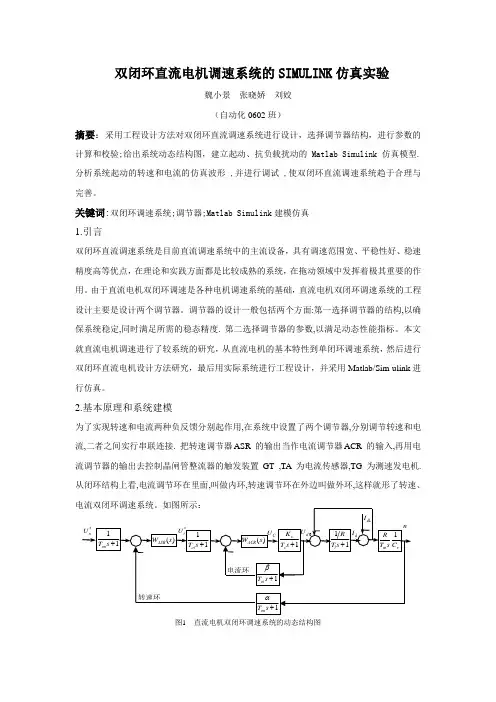
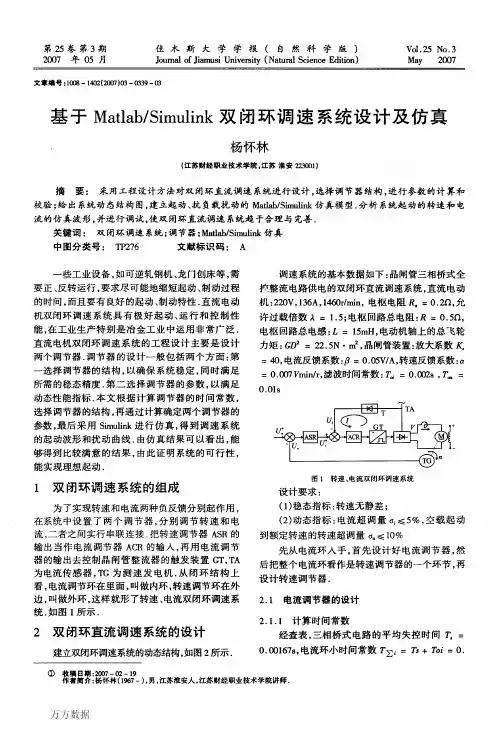
2.基本原理和系统建模为了实现转速和电流两种负反馈分别起作用,在系统中设置了两个调节器,分别调节转速和电流,二者之间实行串联连接. 把转速调节器ASR 的输出当作电流调节器ACR 的输入,再用电流调节器的输出去控制晶闸管整流器的触发装置GT ,TA为电流传感器,TG 为测速发电机. 从闭环结构上看,电流调节环在里面,叫做内环,转速调节环在外边叫做外环,这样就形了转速、图1 直流电机双闭环调速系统的动态结构图3.系统设计调速系统的基本数据如下:晶闸管三相桥式全控整流电路供电的双闭环直流调速系统, 系统参数:直流电动机:220,13.6,1480/m in,0.131/(/m in)e V A r C V r =,允许过载倍数1.5λ=;晶闸管装置:76s K =;电枢回路总电阻: 6.58R =Ω;时间常数:0.018l T s =,0.25m T s =;反馈系数:0.00337/(/min)V r α=,0.4/V A β=;反馈滤波时间常数:0.005oi T s =,0.005on T s =。
、基于matlab的直流双闭环调速系统设计与仿真前言在直流双闭环调速系统设计中,在理论设计基础上根据实际系统运行情况作参数的调整是系统设计调试过程必不可少的一部分。
原因在于系统的实际参数,往往与理论设计时所用的值有一定的误差,而且系统某些环节非线性因素影响会使系统在理论设计参数后并不能立即获得理想的调速性能,因此需要通过调试过程才能获得理想性能。
传统的调试方法不仅增加系统的设计与调试强度而且不易产生预期结果。
matlab/simulink仿真平台是基于模型化图形组态的动态系统仿真软件,利用这种仿真工具可以不运行实际系统,只要在计算机上建立数字仿真模型,模仿被仿真对象的运行状态及其随时间变化的过程。
通过对数字仿真模型的运行过程的观察和设计,得到被仿真系统的仿真输出参数和基本特征,以此来估计和推断实际系统的真实参数和真实性。
而且可以非常方便地完成调试过程且能十分直观地得到系统输出波形。
利用matlab/simulink仿真工具有效地对直流调速系统进行参数调试,可以非常直观地观察电动机电流和转速响应情况进行静态和动态分析,是目前国际上广泛流行的工程仿真技术。
本文利用matlab仿真工具对直流调速系统进行仿真分析,通过仿真方法来调整理论设计所得的参数,找出系统调节器的最佳参数,仿真结果可以用来指导实际系统的设计。
直流调速系统的理论设计1.1 系统组成及要求本文研究的对象为电流转速双闭环直流调速系统,其系统动态结构框图如图1 所示,系统参数如下:电动机:V U N 220=;A I N 136=;rpm n N 1460=;rpm v C e /132.0=; 允许过载倍数: 5.1=λ;三相桥式整流装置放大倍数:40=s K ;电枢回路总电阻: Ω=∑5.0R ;时间常数: s T l 03.0=;ss T m 18.0=,电流反馈系数:A V /05.0=β; 转速反馈系数:rpm V /07.0=α。
课程设计双闭环直流调速系统设计及仿真验证学院年级:工程学院08级组长:陈春明学号200830460102 08自动化1班成员一:陈木生学号200830460103 08自动化1班指导老师:日期:2012-2-28华南农业大学工程学院摘要转速、电流双闭环调速系统是应用最广的直流调速系统,由于其静态性能良好,动态响应快,抗干扰能力强,因而在工程设计中被广泛地采用。
现在直流调速理论发展得比较成熟,但要真正设计好一个双闭环调速系统并应用于工程设计却有一定的难度。
Matlab是一高性能的技术计算语言,具有强大的科学数据可视化能力,其中Simulink 具有模块组态简单、性能分析直观的优点,方便了系统的动态模型分析。
应用Simulink来研究双闭环调速系统,可以清楚地观察每个时刻的响应曲线,所以可以通过调整系统的参数来得出较为满意的波形,即良好的性能指标,这给分析双闭环调速系统的动态模型带来很大的方便。
本研究采用工程设计方法,并利用Matlab协助分析双闭环调速系统,依据自动控制系统快、准、稳的设计要求,重点分析系统的起动过程。
关键词:双闭环直流调速Simulink 自动控制目录1、直流电机双闭环调速系统的结构分析.......................1.1 双闭环调速系统的组成...............................1.2 双闭环调速系统的结构....................................2 、建立直流电机双闭环调速系统的模型............................2.1 小型直流调速系统的指标及参数.........................2.2 电流环设计...............................................2.3 转速环设计................................................3、直流电动机双闭环调速系统的MATLAB仿真....................3.1 系统框图的搭建.............................................3.2 PI控制器参数的设置......................................3.3 仿真结果....................................................4、结论与总结.......................................................5、参考资料.......................................................1、直流电机双闭环调速系统的结构分析1.1 双闭环调速系统的组成为了实现转速和电流2种负反馈分别起作用,在系统中设置了2个调节器,分别是电流调节器ACR(Current Regulator)和转速调节器ASR(Speed Regulator),两者之间实行串级连接,其中转速调节器ASR的输出作为电流调节器ACR的输入,再用电流调节器ACR的输出去控制晶闸管装置。
文章编号:167127963(2003)02230204收稿日期:2002212230作者简介:韩 璐(1972-),女,学士,助理工程师直流电动机双闭环调速系统及其SI MULINK 的仿真韩 璐(中国长江航运集团宜昌船厂,宜昌443002)摘 要:根据直流调速双闭环控制系统的工作原理,运用S imulink 进行直流电动机双闭环调速系统的数学建模和系统仿真的研究,最后显示控制系统模型以及仿真结果并加以分析。
关键词:转速环;电流环;调节器;SI M U LI NK 中图分类号:TP391.9 文献标识码:AAbstract :According to its w orking principle ,m odeling and simulating researches were carried out to the dual closed 2loop control system of the direct current m otor.At the end ,the author analyzed the simulation results.K ey w ords :loop of rev olution rate ;loop of current ;regulator ;SI M U LI NK1 引言直流电动机因其性能宜于在广泛范围内平滑调速,其调速控制系统历来在工业控制具有及其重要的地位,直流调速控制系统中最典型一种调速系统就是转速、电流双闭环调速系统。
在当今社会,仿真技术已经成为分析、研究各种系统尤其是复杂系统的重要工具,为了简便工程设计和解决设计中可能出现的问题,利用Matlab 中SI MU LI NK 实用工具对直流电动机的双闭环调速系统进行仿真和系统分析就成为我们今天急需探讨的课题。
2 电力拖动控制系统的设计设计一个电力拖动控制系统的依据就是系统的稳态和动态性能指标。
稳态指标反映了系统稳态运行的准确性和可调性;跟随性能中的超调量反映系统的相对稳定性;上升时间则反映快速性;抗扰指标中的动态降落也反映系统调节性能的快速性,这一切可归纳为稳、准、快3个字。
双闭环直流电机调速系统的SIMULINK仿真实验电流环图1 直流电机双闭环调速系统的动态结构图 2.系统设计调速系统的基本数据如下:晶闸管三相桥式全控整流电路供电的双闭环直流调速系统, 系统参数:直流电动机:,允许过载倍数;晶闸管装置:;电枢回路总电阻:;时间常数:,;反馈系数:,;反馈滤波时间常数:,。
2. 1 电流调节器的设计2. 1. 1 计算时间常数经查表,三相桥式电路的平均失控时间Ts =0. 0017s ,电流环小时间常数TΣi = Ts + Toi = 0. 0067s ,电枢回路的电磁时间常数Tl = 0.018s。
2. 1. 2 确定电流调节器结构和参数根据性能指标要求σi ≤5 % , 保证稳态无误差。
把电流环校正成典型I 型系统,其传递函数为:WACR ( s) =Ki (τis + 1)/τis 式中Ki ,τi 分别为电流调节器的比例放大系数和领先时间常数. 其中τi = T1 = 0. 018s ,为满足的要求,应取K1TΣi = 0.5 因此: K1 =0.5/ TΣi= 74.63s- 1 ,于是可以求得ACR 的比例放大系数Ki =K1τi R/βKs=0.29故电流调节器的传递函数WACR (s) =0.29(0.018 s + 1)/0.018s经过校验,满足晶闸管整流装置传递函数近似条件,也满足电流环小时间常数近似处理条件,设计后电流环可以达到的动态指标σi = 4. 3 % ≤5 %满足设计要求。
2. 2 速度调节器的设计2 .2. 1 计算时间常数电流环等效时间常数:2 TΣi = 0. 0134s,转速环小时间常数: TΣn = 2 TΣi + Ton = 0. 0318s 2. 2. 2 确定转速调节器结构和参数在转速调节器设计时,可以把已经设计好的电流环作为转速环的控制对象. 为了实现转速无静差,提高系统动态抗扰性能,转速调节器必须含有积分环节,又考虑到动态要求,因此把转速环设计成典型II 型系统,其传递函数为:WASR ( s) = Kn(τns+ 1)/τns式中Kn ,τn 分别为转速调节器的比例放大系数和领先时间常数. 取中频宽h = 5 ,则ASR 的领先时间常数:τn = hTΣn = 0. 159s ,按Mrmin 准则确定参数关系,转速环开环放大系数:KN =(h + 1)/2 h2 T2Σn= 118.67s- 1则ASR 的比例放大系数为:Kn =KNτnβCe TmαR=( h + 1)βCe Tm/2 hαRTΣn,则Kn =11.15 经过校验,满足电流环传递函数等效条件,也能满足转速环小时间常数近似处理条件,转速超调量σn = 8. 3 % ≤10 % 满足设计要求. 为保证电流调节器与转速调节器中的运算放大器工作在线性特性段以及保护调速系统的各个元件、部件与装置不致损坏,在电流调节器与转速调节器的输出端设置了限幅装置,幅值限制为- 6~+ 6。
基于simulink的双闭环直流调速系统设计摘要:研究了双闭环直流调速系统的结构。
根据系统结构,按照由内到外的顺序分别设计电流调节器和转速调节器。
为使系统无静差,两个调节器均选为PI调节器。
在用simulink仿真的过程中,对调节器参数进行了整定,使系统达到稳定状态。
通过仿真曲线,说明了设计的合理性。
关键词:双闭环直流调速;PI调节器;参数整定;simulink 直流调速系统调速范围广、静差率小、稳定性好以及具有良好的动态性能,在高性能的拖动技术领域中,相当长时期内几乎都采用直流电力拖动系统。
现在直流调速理论发展得比较成熟,但要真正设计好一个双闭环调速系统并应用于工程设计却有一定的难度。
本文基于simulink对双闭环直流调速系统进行设计与仿真,合理选择电流调节器和转速调节器的结构,调整调节器的参数,使系统达到设计要求,对电流、转速调节器的参数进行了整定。
本设计是在参数整定的基础上得到仿真曲线,并列出多组数据进行说明。
1.系统设计根据设计多环控制系统的一般原则进行系统设计:从内环开始,一环一环地逐步向外扩展。
先从电流环入手,首先设计好电流调节器,然后把整个电流环看做转速调节系统的一个环节,再设计转速调节器。
稳态指标的要求:系统无静差。
动态指标的要求:空载启动到额定转速时的转速超调量σn≤10%,电流超调量σi≤5%。
2.双闭环直流调速系统的结构带有电流、转速反馈的双闭环调速系统实属多闭环系统,一般采用由内到外一环包一环的形式,内环为电流环,设有电流调节器ACR,外环为转速环,设有转速调节器ASR,构成一个完整的闭环系统。
电流环接受速度环的输出作为控制目标,调节电动机的电流以满足既能控制电动机以较快的速度跟踪参考速度,又不至于产生过流现象损坏电动机,这种结构为工程设计以及调试工作带来相当大的方便。
双闭环直流调速系统结构图如图1所示。
图1中,给定电压U*n=10V,晶闸管放大系数Ks=40,晶闸管失控时间Ts=0.0017s,电枢回路总电阻R=0.5Ω,电磁时间常数Tl=0.03s,机电时间常数Tm=0.18s,电动势常数Ce=0.132V·min/r,转速反馈系数α=0.007V·r/min,电流反馈系数β=0.083V·r/min。
双闭环晶闸管不可逆直流调速系统设计(matlab simulink 仿真)前言许多生产机械要求在一定的范围内进行速度的平滑调节,并且要求具有良好的稳态、动态性能。
而直流调速系统调速范围广、静差率小、稳定性好以及具有良好的动态性能,在高性能的拖动技术领域中,相当长时期内几乎都采用直流电力拖动系统。
双闭环直流调速系统是直流调速控制系统中发展得最为成熟,应用非常广泛的电力传动系统。
它具有动态响应快、抗干扰能力强等优点。
我们知道反馈闭环控制系统具有良好的抗扰性能,它对于被反馈环的前向通道上的一切扰动作用都能有效的加以抑制。
采用转速负反馈和PI调节器的单闭环的调速系统可以再保证系统稳定的条件下实现转速无静差。
但如果对系统的动态性能要求较高,例如要求起制动、突加负载动态速降小等等,单闭环系统就难以满足要求。
这主要是因为在单闭环系统中不能完全按照需要来控制动态过程的电流或转矩。
在单闭环系统中,只有电流截止至负反馈环节是专门用来控制电流的。
但它只是在超过临界电流值以后,强烈的负反馈作用限制电流的冲击,并不能很理想的控制电流的动态波形。
在实际工作中,我们希望在电机最大电流限制的条件下,充分利用电机的允许过载能力,最好是在过度过程中始终保持电流(转矩)为允许最大值,使电力拖动系统尽可能用最大的加速度启动,到达稳定转速后,又让电流立即降下来,使转矩马上与负载相平衡,从而转入稳态运行。
这时,启动电流成方波形,而转速是线性增长的。
这是在最大电流转矩的条件下调速系统所能得到的最快的启动过程。
随着社会化大生产的不断发展,电力传动装置在现代化工业生产中的得到广泛应用,对其生产工艺、产品质量的要求不断提高,这就需要越来越多的生产机械能够实现制动调速,因此我们就要对这样的自动调速系统作一些深入的了解和研究。
本次设计的课题是双闭环晶闸管不可逆直流调速系统,包括主电路和控制回路。
主电路由晶闸管构成,控制回路主要由检测电路,驱动电路构成,检测电路又包括转速检测和电流检测等部分。
SIMULINK练习及闭环直流调速系统仿真利用MATLAB下的SIMULINK软件和电力系统模块库(SimPowerSystems)进行系统仿真是十分简单和直观的,用户可以用图形化的方法直接建立起仿真系统的模型,并通过SIMULINK环境中的菜单直接启动系统的仿真过程,同时将结果在示波器上显示出来。
掌握了强大的SIMULINK工具后,会大大增强用户系统仿真的能力。
在教材第三章中,对工程实践中用得最多的典型Ⅰ型系统和典型II型系统的设计方法进行了详细的分析,在此基础上,利用SIMULINK软件仿真能对调节器的参数进行更为方便的调整,可以更为直观地得到系统仿真的结果,从而加深对工程设计方法的理解。
下面就以例题3-1,3-2设计的转速、电流反馈控制的直流调速系统为例,学习SIMULINK软件的运动控制系统仿真方法。
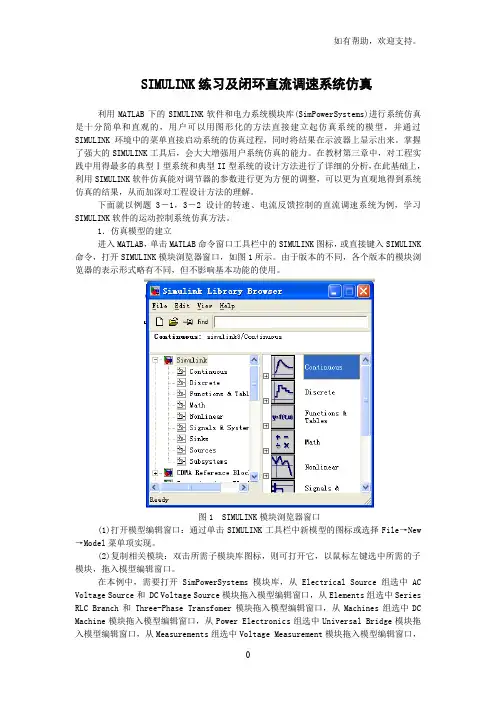
1.仿真模型的建立进入MATLAB,单击MATLAB命令窗口工具栏中的SIMULINK图标,或直接键入SIMULINK 命令,打开SIMULINK模块浏览器窗口,如图1所示。
由于版本的不同,各个版本的模块浏览器的表示形式略有不同,但不影响基本功能的使用。
图1 SIMULINK模块浏览器窗口(1)打开模型编辑窗口:通过单击SIMULINK工具栏中新模型的图标或选择File→New →Model菜单项实现。
(2)复制相关模块:双击所需子模块库图标,则可打开它,以鼠标左键选中所需的子模块,拖入模型编辑窗口。
在本例中,需要打开SimPowerSystems模块库,从Electrical Source组选中AC Voltage Source和 DC Voltage Source模块拖入模型编辑窗口,从Elements组选中Series RLC Branch和 Three-Phase Transfomer模块拖入模型编辑窗口,从Machines组选中DC Machine模块拖入模型编辑窗口,从Power Electronics组选中Universal Bridge模块拖入模型编辑窗口,从Measurements组选中Voltage Measurement模块拖入模型编辑窗口,从Connectors组选中Ground和 T Connector模块拖入模型编辑窗口需要从Simulink模块库中把Source组中的Step模块拖入模型编辑窗口;把Math组中的Sum和Gain模块拖入模型编辑窗口;把Continuous组中的Transfer Fcn模块拖入模型编辑窗口;把Sinks组中的Scope模块拖入模型编辑窗口;把Signal Rounting组中的Demux模块拖入模型编辑窗口;此外,我们还需要ASR、ACR和Pulse Generator三个子系统模块。
基于simulink的双闭环直流电机控制系统的仿真与参数优化摘要:当控制系统和较高的单回路控制系统已不能满足瞬态性能的要求时,我们实现了由内循环到到外循环的多环控制和参数优化。
本文以双闭环直流电机调速系统为例,并采用仿真优化方法来设计两个PI调节器的参数,使之动态与静态指标均达到设计要求。
关键字:参数优化;直流电机;双闭环系统;仿真一、引言经典控制理论中通常为每个物理控制电路设置调节器,但当多个物理参数需要被控制时多个调节器控制环就被需要,例如多回路控制系统。
双闭环直流电机调速系统就是一个典型的多闭环控制系统。
在文献[1]中明确指出负反馈和单闭环PI控制能够保证电流调速系统的稳定性。
当在该控制系统中瞬态性能的要求是高的,如快速制动时,突然的动态负载降低,及其他的减小,单闭环系统将难以满足更高的需求。
解决这个问题的唯一方法是在经典控制理论中优化电流负反馈控制物理参数;同时在当前的控制循环中建立一个调节器,专门为调节电流的大小。
这两个调节器分别调整电流和速度。
这个系统就是直流电机的电流和速度控制系统(我们也叫这个系统双闭环直流调速系统)[1,2]。
二、系统模型为了发挥速度和电流负反馈在系统中有效性,他们不会相互抑制,影响系统的性质,在系统中设置两个调节器,并在调整速度和电流之间实现级联。
也就是说,我们把速度调节器的输出作为电流调节器的输入,然后电流调节器的输出控制可控硅的启动装置。
在闭环反馈的外部结构中,电流调节在环的内部,称之为内环;速度调节在环的外部,称之为外环。
这就形成了双闭环直流调速系统。
为了获得良好的静态和动态性能,双闭环直流调速系统的两个调节器通常采用PI调节器[3]。
考虑到这些因素,如过滤、实际的动态结构,双闭环直流调速系统如图1所示。
为了确保起始电枢电流值不超过允许的值,速度调节器的电压幅值需要是有限的。
这样,当速度调节器变成饱和状态时,输出电压是饱和的,对相应的允许的最大起动电流,电流环是不饱和的,电机确保以恒电流在允许的最大电流值内加速。
双闭环不可逆直流调速系统课程设计方案(matlab仿真设计方案)1随着社会化大生产的不断发展,电力传动装置在现代化工业生产中的得到广泛应用,对其生产工艺、产品质量的要求不断提高,这就需要越来越多的生产机械能够实现制动调速,因此我们就要对这样的自动调速系统作一些深入的了解和研究。
本次设计的课题是双闭环晶闸管不可逆直流调速系统,包括主电路和控制回路。
主电路由晶闸管构成,控制回路主要由检测电路,驱动电路构成,检测电路又包括转速检测和电流检测等部分。
目录1 双闭环直流调速系统的工作原理(1)1.1双闭环直流调速系统的介绍(1)1.2双闭环直流调速系统的组成(2)1.3双闭环直流调速系统的稳态结构和静特性(2)1.4双闭环直流调速系统的数学模型(3)1.5双闭环直流调速系统两个调节器的作用(3)2 双闭环直流调速系统启动过程分析(4)2.1双闭环直流调速系统起动时的转速和电流波形(4)2.2双闭环直流调速系统的起动过程(4)2.3双闭环直流调速系统的动态抗扰性能(5) 2.3.1双闭环直流调速系统的抗负载扰动(5) 2.3.2双闭环直流调速系统的抗电网电压扰动(5) 3 双闭环调速系统的主电路各器件的选择和计算(6) 3.1主电路参数的选择与确定(6)3.1.1直流电机的基本参数(6)3.1.2设计指标(6)3.2.参数的选取和计算(6)3.2.1模块参数设置(6)3.2.2电流调节器的设计(7)3.2.3转速调节器的设计(7)4 MATLAB/SIMULINK仿真软件(7)4.1仿真软件介绍(7)4.2仿真软件操作过程(8)4.2.1建立自控系统的数学模型(8)4.2.2建立自控系统的仿真模型(8)4.2.3编制自控系统仿真程序(8)5.仿真设计(9)6.仿真结果分析(11)6.1电机转速曲线(11)6.2电流电流曲线(12)7.设计结论(12)总结与体会(13)参考文献(14)1 双闭环直流调速系统的工作原理1.1 双闭环直流调速系统的介绍双闭环(转速环、电流环)直流调速系统是一种当前应用广泛,经济,适用的电力传动系统。
双闭环调速课程设计一、课程目标知识目标:1. 学生能理解双闭环调速系统的基本原理,掌握其组成部分及功能。
2. 学生能掌握双闭环调速系统中速度闭环和电流闭环的工作原理及其相互关系。
3. 学生能运用所学知识分析双闭环调速系统的性能,并对其进行优化。
技能目标:1. 学生能通过实际操作,搭建简单的双闭环调速系统,并对其进行调试。
2. 学生能运用相关软件(如MATLAB/Simulink)对双闭环调速系统进行仿真分析。
3. 学生能运用所学知识解决实际工程中与双闭环调速相关的问题。
情感态度价值观目标:1. 培养学生对电气工程及自动化领域的兴趣,激发他们的学习热情。
2. 培养学生具备团队合作意识,提高他们在实际工程中的沟通与协作能力。
3. 培养学生严谨的科学态度,使他们认识到技术在现代社会中的重要作用。
课程性质:本课程为电气工程及其自动化专业的一门专业课程,旨在让学生掌握双闭环调速系统的原理及其在实际工程中的应用。
学生特点:学生已具备一定的电路分析、自动控制理论基础,具有一定的动手能力和问题解决能力。
教学要求:结合课程性质、学生特点,将课程目标分解为具体的学习成果,注重理论与实践相结合,提高学生的实际操作能力和创新能力。
在教学过程中,关注学生的个体差异,引导他们主动探究,培养他们解决问题的能力。
同时,注重培养学生的团队合作意识和科学态度。
二、教学内容1. 双闭环调速系统概述:介绍双闭环调速系统的基本概念、发展历程、应用领域及发展趋势。
教材章节:第一章2. 双闭环调速系统原理:讲解速度闭环和电流闭环的工作原理、参数设置及相互关系。
教材章节:第二章3. 双闭环调速系统性能分析:分析双闭环调速系统的稳态性能、动态性能及其影响因素。
教材章节:第三章4. 双闭环调速系统设计:介绍双闭环调速系统的设计方法、步骤和注意事项。
教材章节:第四章5. 双闭环调速系统仿真与实验:运用MATLAB/Simulink软件进行双闭环调速系统的仿真分析,以及实际操作搭建和调试双闭环调速系统。
Simulink系统仿真课程设计一、课程目标知识目标:1. 学生能理解Simulink的基本原理和功能,掌握Simulink的常用模块及其使用方法。
2. 学生能运用Simulink构建数学模型,实现对动态系统的仿真和分析。
3. 学生能掌握Simulink与MATLAB的交互操作,实现数据传递和模型优化。
技能目标:1. 学生具备运用Simulink进行系统仿真的能力,能独立完成简单系统的建模和仿真。
2. 学生能通过Simulink对实际工程问题进行分析,提出解决方案,并验证其有效性。
3. 学生具备团队协作能力,能与他人合作完成复杂系统的仿真项目。
情感态度价值观目标:1. 学生对Simulink系统仿真产生兴趣,提高对工程学科的认识和热爱。
2. 学生在仿真实践中,培养严谨的科学态度和良好的工程素养。
3. 学生通过课程学习,增强解决实际问题的信心,形成积极向上的学习态度。
课程性质:本课程为实践性较强的学科,结合理论知识,培养学生运用Simulink进行系统仿真的能力。
学生特点:学生具备一定的MATLAB基础,对Simulink有一定了解,但实际操作能力较弱。
教学要求:注重理论与实践相结合,强化动手能力训练,培养学生解决实际问题的能力。
在教学过程中,关注学生的个体差异,因材施教,提高学生的综合素质。
通过课程学习,使学生能够独立完成系统仿真项目,并为后续相关课程打下坚实基础。
二、教学内容本课程教学内容主要包括以下几部分:1. Simulink基础操作与建模- 熟悉Simulink环境,掌握基本操作。
- 学习Simulink常用模块,如数学运算、信号处理、控制等模块。
- 结合教材章节,进行实际案例分析,让学生了解Simulink建模的基本过程。
2. 系统仿真与分析- 学习Simulink仿真参数设置,掌握仿真算法和步长设置。
- 利用Simulink对动态系统进行建模与仿真,分析系统性能。
- 结合实际案例,让学生通过仿真实验,掌握系统性能分析方法。
《基于simulink的双闭环直流调速系统的设计与仿真》毕业设计的英文翻译————————————————————————————————作者:————————————————————————————————日期:基于Simulink的双闭环直流电机调速系统的参数优化与仿真摘要在控制系统中当动态性能的要求很高,并且单回路控制系统不能满足的要求时,我们实施了多环控制和在线对内环和外环进行参数优化。
本文以双回路直流电动机调速控制系统为例,采用仿真优化方法设计两个PI调节器的参数,使系统的动态和稳态指标达到设计要求。
关键字:参数优化直流电动机双闭环系统仿真正文:I简介在经典控制理论中,通常对控制电路中的每个物理量设立一个调节器,当有多个物理参数要被控制时,就需要设置多个调节器来控制这些参数,这样的系统被称为多回路控制系统.双闭环直流电动机调速系统是一个典型的多环控制系统.根据文献[1]我们很清楚的了解到速负反馈控制的单闭环直流调速系统用PI调节器可以保证系统的稳定性。
然而当控制系统对动态性能要求很高,例如快速制动、突加负载时转速降落小等要求,单闭环调速系统将难以满足需求.经典控制理论解决这个问题的唯一的方法是实现电流负反馈控制,在电流控制环中设置一个调节器,特别是用于调节电流量的调节器。
控制系统中就建立了转速、电流两个调节器。
这样的系统被称为直流电动机的电流和转速控制系统(这样的系统也被称为双闭环直流电动机调速系统)。
II 系统模型为了充分发挥转速和电流负反馈在系统中的控制作用,以及它们不会相互抑制影响系统的性能,我们在系统中设置了两个调节器调节速度和电流,实现它们之间的联接。
也就是说,我们把速度调节器的输出作为电流调节器的输入,电流调节器的输出控制整流电路的触发装置。
从整个闭环反馈控制回路的结构来看,电流调节环在转速调节环之内,称之为内环;转速调节环在外,称之为外环.这就形成了一个双闭环直流调速系统.为了获得良好的静、动态性能,双闭环直流调速系统的两个调节器一般设计为PI 调节器。
x x 学院学报Journal of xxx College基于Matlab-Simulink仿真的双闭环直流调速系统的设计与研究姓名(xxx大学,江苏,南京210000摘要:根据实际应用要求以及给定参数,对转速、电流双闭环直流调速系统进行设计,计算其控制系统的参数,并通过matlab软件的simnlink,对设计的系统进行仿真,以验证设计的正确性,并分析仿真结果,从而进一步说明双闭环调速系统的可行性与优越性。
对计算过程做了着重重视,详细精炼,可以为高校学生参与调速研究提供细节性的指导。
关键词:双闭环直流调速matlab 仿真中图分类号:TG156文献标志码:DESIGN AND RESEARCH Of DOUBLE-LOOP DC MOTOR SPEED CONTROL SYSTEM BASED ON MATLAB-SIMULINKName(xxx College ,Nanjing 210000,Jiangsu ,ChinaAbstract:According to the practical appliance and the parameters given , make a design of the double-loop DC motor speed control system, calculating the other parameters that are needed in the control system we design .I make a simulation of the control system through Matlab-simulink to ensure the preciseness of it. Besides, there is adeep analyse about the characters of the designed system to account for the feasibility of the double-loop DC motor speed control system,as well as the supriorities of it . I make stronge emphysis on specific calculation of the parameters, it can supply a guide for college student who are in research of the speed control system in details.Key words: double-loop;DC machine speed control ; matlab ;simulation0 引言*直流电动机因其性能宜于在广泛范围内平滑调速,其调速控制系统历来在工业控制中占有极其重要的地位。
- --课程设计双闭环直流调速系统设计及仿真验证学院年级:工程学院08级组长:陈春明学号2 08自动化1班成员一:陈木生学号3 08自动化1班指导老师:日期:2012-2-28华南农业大学工程学院摘要转速、电流双闭环调速系统是应用最广的直流调速系统,由于其静态性能良好,动态响应快,抗干扰能力强,因而在工程设计中被广泛地采用。
现在直流调速理论发展得比较成熟,但要真正设计好一个双闭环调速系统并应用于工程设计却有一定的难度。
Matlab是一高性能的技术计算语言,具有强大的科学数据可视化能力,其中Simulink具有模块组态简单、性能分析直观的优点,方便了系统的动态模型分析。
应用Simulink来研究双闭环调速系统,可以清楚地观察每个时刻的响应曲线,所以可以通过调整系统的参数来得出较为满意的波形,即良好的性能指标,这给分析双闭环调速系统的动态模型带来很大的方便。
本研究采用工程设计方法,并利用Matlab协助分析双闭环调速系统,依据自动控制系统快、准、稳的设计要求,重点分析系统的起动过程。
关键词:双闭环直流调速Simulink 自动控制目录1、直流电机双闭环调速系统的结构分析.......................1.1 双闭环调速系统的组成...............................1.2 双闭环调速系统的结构....................................2 、建立直流电机双闭环调速系统的模型............................2.1 小型直流调速系统的指标及参数.........................2.2 电流环设计...............................................2.3 转速环设计................................................3、直流电动机双闭环调速系统的MATLAB仿真....................3.1 系统框图的搭建.............................................3.2 PI控制器参数的设置......................................3.3 仿真结果....................................................4、结论与总结.......................................................5、参考资料.......................................................1、直流电机双闭环调速系统的结构分析1.1 双闭环调速系统的组成为了实现转速和电流2种负反馈分别起作用,在系统中设置了2个调节器,分别是电流调节器ACR(Current Regulator)和转速调节器ASR(Speed Regulator),两者之间实行串级连接,其中转速调节器ASR的输出作为电流调节器ACR的输入,再用电流调节器ACR的输出去控制晶闸管装置。
从闭环结构上看,电流调节器在里面,叫做内环;转速调节器在外边,叫做外环。
双闭环调速系统的原理图如图1所示。
图1 双闭环调速系统的原理图1.2 双闭环调速系统的结构直流电机的双闭环调速系统的结构如图2所示,电流调节和速度调节之间实行串联联接,及以速度调节器ASR 的输出,作为电流调节器ACR 的输入,再用电流调节器ACR 的输出,作为晶闸管触发器AT 的控制电压,从而调节晶闸管变流器的整流电压Ud,这样,两种调节作用就能互相配合,相辅相成。
为了获得良好的静态、动态性能,两个调节器一般都采用PI 调节器。
图2 双闭环调速系统的结构图图 1 中转速调节器ASR 和电流调节器ACR 的型式和参数将在设计过程中决定。
转速电流双闭环调速系统属于多环系统,电流环是内环,转速环是外环。
设计先从内环入手,首先设计电流调节器,把电流环等效为转速环中的一个环节,再设计转速调节器。
设计方法是根据对闭环工作的要求,选择典型系统的类型,然后按最佳参数为闭环系统设计合适的调节器,最后求出调节器参数。
图3 双闭环调速系统的动态结构图双闭环调速系统的动态结构图如图3所示。
由于检测信号和转速检测信号中常含有交流谐波成分,在反馈端加上T型滤波器。
同时为了补偿反馈通道中的惯性作用,在给定通道中也加入时间常数相同的惯性环节。
2 建立直流电机双闭环调速系统的模型2.1 小型直流调速系统的指标及参数(1)静态精度(转差率S), 在电网电压波动±10%,负载变化±20%,静态精度 S 〈5%,电流和转速超调量σ〈1000,振荡次数N<(2~3),调速范围D 〉10~15;(2)电动机数据∶额定电流136A ,额定电压230V ,功率30KW , 额定转速1460转/分,电势转速比,132.0=e C 电枢电阻R Ω=0.5Ω,过载系数λ=1.5,可控硅整流装置K S =40. s T L 03.0=,s T m 81.0=。
(3)测速发电机,永磁式,额定数据为∶电压110V ,电流0.045A ,转速1900r/min ,min /1900,21.0,1.23r n A I W P g g g ===(4)静态计算:根据调速范围和静差率的要求得到:min /33.7)05.01(1005.01460)1(0r s D s n n =-⨯=-=∆取测速反馈输出电压为10V ,则转速反馈系数:007.0146010===n u n α ASR 饱和输出取12V ,系统输出最大电流为ddm I I 2=,则电流反馈系数: 037.0136*210*==dm i I U β,取0.052.2 电流环设计电流环设计主要为电流调节器的选择及参数计算。
(1)电流环结构的简化。
由于电流的响应过程比转速响应过程快得多,因此假定在电流调节过程中,转速来不及变化,从而不考虑反电动势 E 的影响,所以反电势的反馈支路相当于断开,再把反馈环节等效地移到环内。
因为s T 和oi T 一般比1T 小得多,可作小惯性环节处理,故取oi s T T T +=∑。
其中简化条件满足扰动作用下的闭环传递函数:1****1*2**1*2)1*(**2*1**2)()(2233222+++++++=∆S T h S T h h S T h h S T S K h T h S N S C 电流环结构图最后简化为如下框图:图 4 电流环的动态结构简化图(2)电流调节器的选择。
对于经常起制动的生产机械,希望电流环跟随性能好,起超调量越小越好。
在这种情况下,应该选择典型 I 型系统设计电流环。
如果生产机械工作环境的电网电压波动较大,希望电流环有较强的抗电网电压扰动能力。
从这个观点出发,电流环应该采用典型 II 型系统设计电流环。
另外,电流环中两个时间常数之比,也可决定选择方案。
在这里选用典型I 型系统进行电流环的设计。
图3 表明电流调节 ACR 的调节对象是双惯性环节,为了把电流环校正成典型I 型系统,ACR 函数必须是PI 调节器形式。
其传递函数为SS K S W i i i ACR *1**)(ττ+= 为了消去控制对象的大惯性时间常数的极点,选择1T i =τ,则电流环的动态结构图简化为图 5 校正成典型I 型系统的电流环其中,RK K K i s i I **τβ= 比较典型的二阶开环传递函数,得s I K K =,T T i =∑。
(3)电流调节器参数选择。
电流调节器参数是I K 和i τ。
现在已选定1T i =τ,而i τ取决于所需的ci ω和动态性能指标。
所以三相桥式整流电路平均失控时间:s T s 0017.0=,电流滤波时间常数:s T oi 002.0=。
电流环小时间常数:0037.0=+=∑oi s i T T TACR 时间常数:==l i T τs 03.0又因%5%<σ,取1.1350037.05.05.0===∑i I T K ACR 的比例系数为:013.14005.05.003.01.135=⨯⨯⨯==s i I i K R K K βτ 1.135==I ci K ω(4)实际电路的参数计算。
根据以上的数据,计算模拟的电子电路实际电路的电器元件的参数如下取:R 0=40K,K R K R i i 26.2420213.10=⨯== 取40KF R C i i i μτ75.04000003.0=== 取F μ75.0 F R T C oi oi μ2.040000002.0440=⨯== 取F μ2.0 则实际电路图如图6所示。
其中:D 1,D 2,W 1,W 2构成限幅电路。
图 6 电流环原理图2.3 转速环设计(1)电流环的闭环传递函数。
在设计转速环时,把设计好的电流环作为转速调节器的调节对象的一部分,所以电流环的传递函数为1*)(1))1*(*(1))1*(*()(1++=+++=∑∑∑I I i i I i I ic K S S K T S T S K S T S K S W 转速环的截止频率cn ω较低,因此电流闭环传递函数可降阶近似处理,即 1*)1(1)(1+=S K S W I ic 由于图5的输入信号为β*i U ,在这里考虑设计成5.0*=∑i I T K ,则电流环等效闭环传递函数 1**21)(*+=∑S T U S I i i d ββ(2)转速环的简化即调节器的选择。
转速闭环部分的简化图如图7,其中on i n T T T +=∑∑2图 7 转速环的动态结构简化图图 8 转速环的动态结构简化图图8 为不考虑负载 IL 的扰动情况下的简化。
因为调速系统首先需要有较好的抗扰动性能,所以采用抗扰能力强的典型II 型系统设计转速调节器。
要把转速环校正为典型 II 型系统,ASR 应该采用 PI 型,其传递函数为SS K S W n n n ASR *1*)(ττ+= 调速系统的开环传递函数为)1*(*)1*(*)1*(*****)1*(***)(22++=++=∑∑S T S S K S T S T C B S R a K S W n n N n m e n n n n τττ式中,me n n N T C B R a K K *****τ=(3)转速调节器参数的选择。
1)确定时间常数:电流环等效时间常数为=∑i T 20.0074s转速滤波时间常数为取为=on T 0.01s转速环小时间常数0174.02=+=∑∑on i n T T T s2)根据性能指标选取h=5ASR 的超前时间常数s hT n n 087.00174.05=⨯==∑τ 转速环开环增益4.3960174.025*******=⨯⨯+=+=∑n N T h h K ASR 的比例系数为:7.110174.05.0007.05218.0132.005.062)1(=⨯⨯⨯⨯⨯⨯⨯=+=∑n m e n RT h T C h k αβ 转速截止频率 5.34087.04.3961=⨯===n N N cn K K τωω(4)实际电路的参数计算。