安川机器人plc编程剖析
- 格式:ppt
- 大小:977.00 KB
- 文档页数:3

安川机器人常用程式指令功能讲解安川机器人是一种广泛应用于工业生产领域的自动化设备,在工厂中可以替代人工完成一系列工作任务。
为了使机器人完成各种任务,需要使用一种特定的编程语言给机器人下达指令。
下面我将对安川机器人常用的程式指令功能进行详细讲解。
1.位姿操作指令:2.弧线插补指令:弧线插补指令是安川机器人常用的指令之一、通过该指令,机器人可以按照一定的曲线轨迹移动,从而实现更加复杂的运动。
这种指令可以用于处理复杂的装配任务,如圆弧路径的铆接、焊接等。
3.状态监控指令:4.条件判断指令:安川机器人的编程语言支持条件判断指令,可以根据不同的条件执行不同的操作。
例如,可以根据感应器的信号判断是否执行下一步操作,或者根据工件的尺寸判断是否进行其中一种加工操作。
这种指令的使用可以使机器人的工作更加灵活和智能。
5.子程序指令:子程序指令是安川机器人编程中常用的一种指令,可以将一系列指令组织成一个子程序,方便在需要时进行调用。
通过子程序的使用,可以简化机器人编程的过程,并且可以减少重复的代码,提高编程效率。
6.数据处理指令:安川机器人的编程语言支持数据处理指令,可以对数据进行处理和分析。
例如,可以对传感器采集的数据进行分析,从中提取有用的信息,或者对机器人运动的轨迹进行优化和调整。
这些指令可以提高机器人的智能化水平,并且增强其自主性。
综上所述,安川机器人的常用程式指令功能包括位姿操作指令、弧线插补指令、状态监控指令、条件判断指令、子程序指令和数据处理指令等。
这些指令可以使机器人能够执行更加复杂的任务,提高生产效率,并且提供了一些灵活性和智能性的功能。
通过深入了解和使用这些指令,可以更好地发挥机器人在工业生产中的作用。
安川机器人码垛编程实例解释
安川机器人是一种工业机器人,用于自动化生产线上的各种操作,包括码垛(将货物堆叠成一定的形状)。
编程实例通常指的是
针对特定任务的编程示例,用于演示如何使用安川机器人进行码垛
操作。
在一个编程实例中,通常会包括以下内容:
1. 任务描述,说明需要完成的具体码垛任务,包括货物的种类、尺寸、堆叠方式等。
2. 机器人动作规划,描述安川机器人在执行码垛任务时需要进
行的具体动作,包括移动、抓取货物、放置货物等。
3. 编程代码,展示如何使用安川机器人的编程语言(通常是类
似于 C++ 或 Python 的语言)来实现上述动作规划,包括控制机器
人的运动、抓取和放置货物等操作。
4. 演示结果,展示编程实例的运行结果,通常是一个视频或者
模拟演示,以便理解安川机器人如何完成码垛任务。
通过这样的编程实例,工程师和操作人员可以学习如何利用安川机器人进行码垛操作,并且可以根据具体任务进行修改和定制,从而实现自动化生产线上的货物堆垛操作。
安川焊接编程一、引言本文档旨在提供有关安川焊接编程的详细说明和指导。
它包含了使用安川焊接进行编程的基本步骤,以及一些常见问题的解决方法。
本文档适用于初学者和有一定编程经验的用户。
如果您是第一次接触安川焊接编程,请务必详细阅读本文档。
二、编程概述1、安川焊接编程的基本原理1.1 编程的目的和意义1.2 安川焊接编程的基本概念1.3 编程语言和工具的选择2、焊接工艺参数的设置2.1 焊接工艺参数的定义和影响因素2.2 安川焊接中的工艺参数设置方法3、编程环境的搭建3.1 安装和配置编程软件3.2 连接焊接与编程软件3.3 创建新的编程项目4、姿态和路径编程4.1 坐标系的定义和标定4.2 姿态和路径的描述方法和坐标系选择4.3 基本的姿态和路径编程指令5、运动与逻辑控制5.1 运动模式和方式的选择5.2 逻辑控制指令的使用5.3 循环控制和条件判断的编程方法6、焊接过程监控与调试6.1 实时监控焊接过程参数6.2 错误处理和调试方法6.3 问题排除和优化三、附件本文档附带以下附件,以供参考:- 安川焊接编程示例代码- 安川焊接编程教学视频四、法律名词及注释1、:指能够自动执行某种任务的可编程设备,通常由机械、电气和计算机系统组成。
2、焊接:指将两个或多个工件通过熔化和凝固的方式连接在一起的加工方法。
3、工艺参数:指在焊接过程中可以进行调整的相关参数,如焊接电压、电流、速度等。
4、坐标系:指用于描述位置和姿态的一组参考轴线。
5、编程软件:指用于编写和管理程序的计算机应用程序。
6、姿态编程:指通过定义的位姿(位置和姿态)来描述的动作。
7、路径编程:指通过定义的路径来描述的运动轨迹。
8、运动模式:指执行任务时使用的运动类型,如直线运动、圆弧运动等。
9、逻辑控制:指编程中使用的条件判断、循环控制等语句来控制的行为。
安川plc编程本文档旨在提供安川PLC编程的详细指南和范本,以帮助用户顺利进行编程工作。
请注意,本文档需要在已经具备相关编程基础知识的前提下使用。
在阅读本文档之前,请确保您已经了解并掌握了安川PLC编程的基本概念和操作方法。
1:硬件准备在开始编程之前,您需要确保以下硬件设备已经准备就绪:- 安川控制器- PLC编程软件- 适配的连接线缆2:连接控制器和计算机使用适配的连接线缆将控制器与计算机连接起来。
确保连接稳定可靠。
3:打开PLC编程软件启动安川PLC编程软件,并创建一个新的项目。
4:项目设置在新建项目后,需要进行一些项目设置。
- 设置控制器类型和型号。
- 设置通信参数和连接方式。
- 配置PLC的输入和输出设备。
5:编写程序开始编写程序。
根据您的需求和控制器的功能,编写相应的PLC程序。
确保程序逻辑清晰、准确。
6:联机调试在编写完程序后,进行联机调试。
连接控制器,检查程序运行情况。
如有错误或异常,及时排除问题。
7:程序优化对程序进行优化,提高效率和稳定性。
注意常见的PLC编程问题,如变量定义、循环逻辑和异常处理等。
8:保存程序在优化和测试完成后,保存程序至控制器。
确保程序可以被顺利执行。
9:文档归档对于每一次编程工作,都要将相关文档归档存储,以备日后查阅和使用。
附件:本文档不涉及附件。
法律名词和注释:- 安川:指安川电机株式会社的产品和技术。
安川电机株式会社是一家跨国公司,专注于工业自动化和技术领域。
- PLC编程:PLC全称为可编程逻辑控制器,是一种用于控制工业自动化过程的计算机。
PLC编程是指对PLC进行程序设计和开发的过程。

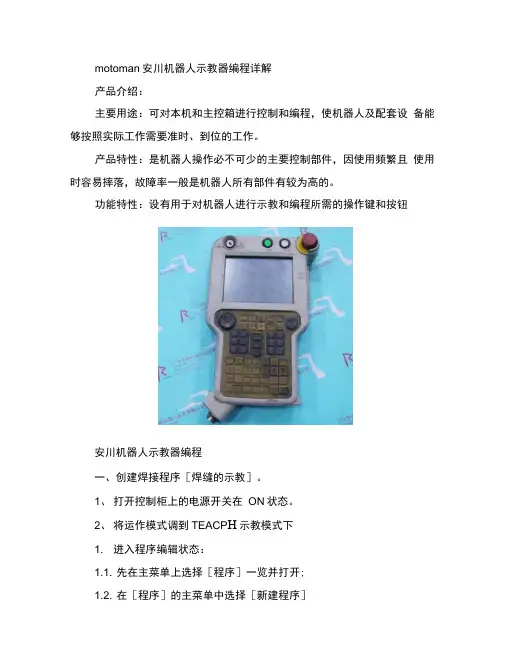
motoman安川机器人示教器编程详解产品介绍:主要用途:可对本机和主控箱进行控制和编程,使机器人及配套设备能够按照实际工作需要准时、到位的工作。
产品特性:是机器人操作必不可少的主要控制部件,因使用频繁且使用时容易摔落,故障率一般是机器人所有部件有较为高的。
功能特性:设有用于对机器人进行示教和编程所需的操作键和按钮安川机器人示教器编程一、创建焊接程序[焊缝的示教]。
1、打开控制柜上的电源开关在ON状态。
2、将运作模式调到TEACP H示教模式下1. 进入程序编辑状态:1.1. 先在主菜单上选择[程序]一览并打开;1.2. 在[程序]的主菜单中选择[新建程序]1.3. 显示新建程序画面后按[选择]键14显示字符画面后输入程序名现以TEST为新建程序名举例说明;1.5. 把光标移到字母T” E” S” T”上按[选择]键选中各个字母;1.6. 按[回车]键进行登录;1.7. 把光标移到执行”上并确认后,程序TEST被登录,并且屏幕画面上显示该程序的初始状态NOPCEO”、O ENDCOO”L1.8. 编辑机器人要走的轨迹(以机器人焊接直线焊缝为例);2. 把机器人移动到离安全位置,周边环境便于作业的位置,输入程序(001);2.1. 握住安全电源开关,接通伺服电源机器人进入可动作状态;2.2. 用轴操作键将机器人移动到开始位置(开始位置电影摄制在安全病史和作业准备位置);2.3. 按[插补方式]键,把插补方式定为关节插补,输入缓冲显示行中显示关节插补命令,?MOVJ^” MOVJ,,VJ=0.78”2.4. 光标放在00000”处,按[选择]键;2.5. 把光标移动到右边的速度VJ=** ”上,按[转换]键+光标上下” 键,设定再现速度,若设定速度为50%寸,则画面显示■ MOUWJ=50%, 也可以把光标移到右边的速度,?VJ=***' 上按[选择]键后,可以直接在画面上输入要设定的速度,然后按[回车]键确认。
安川机器人操作及编程简易教程目录一、概述 (3)1. 安川机器人简介 (3)2. 教程目的与适用范围 (4)3. 教程所需软件与硬件要求 (5)二、机器人基本操作 (6)1. 机器人开机与关机操作 (7)1.1 开机步骤 (7)1.2 关机步骤 (7)2. 机器人手动操作模式 (8)2.1 机器人手动控制介绍 (9)2.2 手动操作界面介绍 (11)2.3 手动操作注意事项 (11)3. 机器人自动操作模式 (12)3.1 自动操作模式介绍 (14)3.2 自动操作程序设置步骤 (15)3.3 自动操作注意事项 (15)三、机器人编程基础 (16)1. 编程基础概念 (18)1.1 编程术语解析 (19)1.2 编程语言简介 (20)1.3 机器人编程流程 (21)2. 安川机器人编程语言介绍 (23)2.1 语言特点 (25)2.2 语法规则 (26)2.3 编程实例解析 (27)3. 机器人程序调试与运行 (28)3.1 程序调试步骤 (29)3.2 程序运行监控 (30)3.3 错误处理与故障排除 (31)四、机器人高级编程技术 (32)1. 高级编程技术概述 (33)2. 复杂程序编写实例解析 (34)2.1 多任务程序编写 (35)2.2 路径规划程序编写 (36)2.3 协同作业程序编写 (37)3. 高级编程技巧与注意事项 (38)3.1 编程优化技巧 (39)3.2 代码可维护性考虑 (40)3.3 安全防范措施讲解 (41)五、机器人维护与保养 (42)1. 机器人日常检查项目与步骤 (43)2. 机器人定期保养流程 (44)3. 机器人故障排除与处理方法 (45)4. 机器人维护与保养注意事项 (46)六、案例分析与实践操作指导 (47)一、概述随着科技的快速发展,人工智能和机器人技术已经成为当今世界的热门话题。
在制造业、医疗、服务业等领域,机器人已经得到了广泛的应用。
安川机器人作为一家知名的机器人制造商,为各种应用领域提供了高效、精准的机器人解决方案。
[安川机器人命令集x]安川plc编程指令大全命令介绍1INFORM的概要1.1INFORM的构成07.06.11完成N某100使用的机器人语言称为INFORMIII。
请勿外传INFORMIII由命令和附加项(标记符、数据)组成。
MOVJVJ=50.00命令:表示执行的处理和作业。
使用移动命令时,示教的位置数据会与插补方式一块自动显示。
附加项:可设定速度和时间等。
设定条件时,可根据需要附加数据和文字。
1.2命令的种类命令分为以下几种。
输入输出命令执行输入输出控制的命令。
DOUT、WAIT控制命令执行处理和作业控制的命令。
JUMP、TIMER运算命令使用变量等进行运算的命令。
ADD、SET移动命令与移动和速度相关的命令。
MOVJ、REFP平移命令平行移动当前示教位置时使用的命令。
SFTON、SFTOF作业命令与作业有关的命令。
ARCON、WVON选项命令与选项功能有关的命令。
1.3命令集为提高操作效率,通过命令集可限制示教时可登录命令的个数。
再现时可执行的命令与命令集无关,可执行所有命令。
·子集只有使用频率比较高的命令才能登录。
由于命令数目少,选择和输入操作都比较简单。
·标准集/扩展集可登录所有命令。
标准集和扩展集的区别主要是各命令能使用的附加项的个数不同。
标准集不能使用如下功能,只在登录这些命令时数据的数目会减少,操作方便些。
使用局部变量附加项目使用变量(例:MOVJVJ=I000)1.3.1命令集的切换在〔示教条件〕画面切换命令集。
1命令介绍1.4命令中能使用的变量设定为标准集和扩展集时,变量可以作为附加项的数据使用。
扩展集还可使用局部变量。
但是附加项变量的单位和数值的单位是不一样的。
命令的登录2.1命令的登录在程序内容画面按〔命令一览〕键进行命令的登录。
:TEST01STEPNO:0003I/O:R1JUMPTOOL:某0000NOPCALL0001MOVJVJ=25.00PL=0NWAITACC=20DCC=200002MOVJVJ=25.00TIMER0003MOVJVJ=12.50LABEL0004ARCONASF#(1)COMMENT0005ENDRETJUMP某LABEL!2.2命令的学习功能命令的学习功能就是指在登录命令时,缓冲行会显示与上次登录此命令时同样的附加项,这样可使登录更简单方便。
安川PLC程序及软件操作首先,为了编写安川PLC程序,需要使用特定的编程软件。
目前,安川PLC的编程软件主要有两种:一种是CX-Programmer,另一种是NANDIAS。
CX-Programmer适用于安川的CP1H系列和CP1L系列PLC,而NANDIAS适用于安川的NJ系列PLC。
下面将以CX-Programmer为例,介绍安川PLC程序的编写和软件操作过程。
第一步,打开CX-Programmer软件,并选择新建一个项目。
然后,选择一个适用于目标PLC型号的项目模板。
接着,输入项目名称和存储位置,并点击确定。
第二步,界面中会出现一个工程导航树,其中包含了程序、数据表、符号表、监视表等等模块。
在程序模块中,可以编写PLC的控制逻辑代码。
第三步,右键点击程序模块,选择新建立一个程序。
然后,在弹出的对话框中输入程序名称,并选择程序的类型(例如连续型、跳转型、或其他类型)。
最后,点击确定完成程序的创建。
第四步,双击打开刚刚创建的程序,并编写程序的逻辑代码。
PLC程序的编写语言一般采用梯形图(ladder diagram)方式。
在CX-Programmer中,可以通过拖拽功能块(Function Blocks)、输入、输出连接符号等等来编写代码。
编写完每一段代码后,都需要进行编译和上传到PLC设备中的操作。
第五步,编写完整的PLC程序后,可以使用仿真功能测试程序的正确性。
在CX-Programmer软件中,有一个仿真环境可以模拟PLC设备的工作情况。
通过运行仿真,可以验证程序的逻辑是否正确,以及PLC设备的输出是否满足预期。
除了CX-Programmer,还有其他一些与安川PLC相关的软件工具,可以用于更高级别的配置和监控。
比如,可以使用WINCAPS III软件来进行整个控制系统的配置和调整,用PLC Setup Tool软件来进行PLC设备的设置和管理,以及使用MotionWorks IEC软件来进行运动控制编程。