机械设计基础_孙立鹏_习题第五章轮系汇总
- 格式:doc
- 大小:297.00 KB
- 文档页数:12

5-1 如图所示的V 带在轮槽内的三种安装情况,哪一种正确?为什么?答:第一种安装方式正确。
因为第二种安装方式,使带缠身较大的弯曲变形,带在传动中受到的弯曲应力增大,影响带的使用寿命。
第三种安装方式,使带的工作面与带轮的接触面积减小,影响带传动的传动能力。
5-2 什么是有效拉力?什么是初拉力?它们之间的关系?答:紧边和松边拉力的差值为带传动中起传递转矩作用的拉力,称为有效拉力F 。
为保证带传动正常工作,传动带必须以一定的张紧力紧套在带轮上,由于静止不动,带两边承受相等的拉力,称为初拉力F o 。
1120+-=ee Ff f F αα5-3 小带轮包角对带传动有何影响?为什么只给出小带轮包角的计算公式?答:F 随α的增大而增大。
增加α会使接触弧上摩擦力的总和增加,从而使F 增大,提高其传动能力。
由于大带轮到包角α2大于小带轮的包角α1,打滑首先发生在小带轮,因此,只考虑小带轮的包角α1。
5-4 带传动工作时,带的截面上产生哪些应力?应力沿带全长是如何分布的?最大应力在何处?答:(1)拉应力:作用于带的全长。
带的紧边σ1为,松边为σ2,σ1>σ2。
(2)弯曲应力:绕过带轮处受到弯曲应力的作用。
σb1>σb2。
(3)离心拉应力:沿带长均匀分布。
当带在紧边绕上小带轮时应力达到最大值,其值为 σmax =σ1+σb1+σC5-5 带传动的弹性滑动和打滑是如何产生的?它们对带传动的影响?是否可以避免? 答:弹性滑动是由于带的弹性变形,只要传递圆周力,就会产生弹性滑动,不可避免。
弹性滑动引起带的传动比的变化。
打滑是由于过载引起的,能够避免。
5-6 链传动的主要失效形式有哪几种?答:链板疲劳破坏;滚子和套筒的冲击疲劳破坏;链条铰链磨损;链条铰链的胶合;静力拉断。
5-7 链传动为何要适当张紧?与带传动的张紧有什么区别?答:链传动中,不需要给链条初拉力。
链传动张紧的目的,是为了避免松边下垂量过大而引起啮合不良或振动现象。
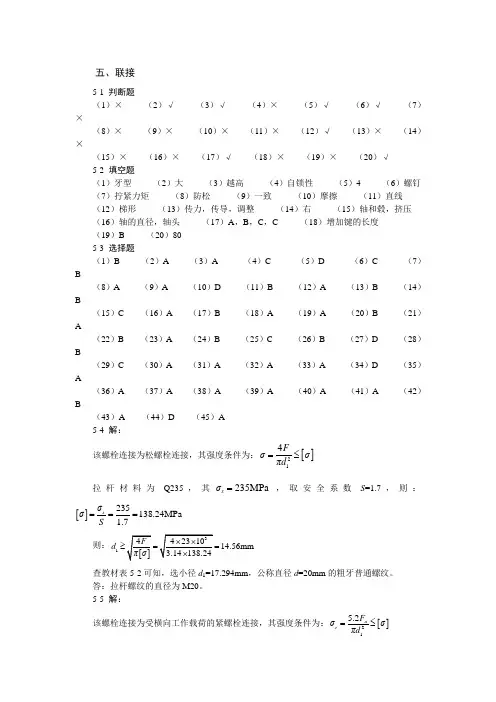
五、联接5-1 判断题(1)× (2)√ (3)√ (4)× (5)√ (6)√ (7)×(8)× (9)× (10)× (11)× (12)√ (13)× (14)×(15)× (16)× (17)√ (18)× (19)× (20)√ 5-2 填空题(1)牙型 (2)大 (3)越高 (4)自锁性 (5)4 (6)螺钉 (7)拧紧力矩 (8)防松 (9)一致 (10)摩擦 (11)直线 (12)梯形 (13)传力,传导,调整 (14)右 (15)轴和毂,挤压 (16)轴的直径,轴头 (17)A ,B ,C ,C (18)增加键的长度 (19)B (20)80 5-3 选择题(1)B (2)A (3)A (4)C (5)D (6)C (7)B(8)A (9)A (10)D (11)B (12)A (13)B (14)B(15)C (16)A (17)B (18)A (19)A (20)B (21)A(22)B (23)A (24)B (25)C (26)B (27)D (28)B(29)C (30)A (31)A (32)A (33)A (34)D (35)A(36)A (37)A (38)A (39)A (40)A (41)A (42)B(43)A (44)D (45)A 5-4 解:该螺栓连接为松螺栓连接,其强度条件为:[]214Fσσπd =≤ 拉杆材料为Q235,其235M P s σ=,取安全系数S =1.7,则:[]235138.24MPa 1.7s σσS === 则:114.56mm d = 查教材表5-2可知,选小径d 1=17.294mm ,公称直径d =20mm 的粗牙普通螺纹。
答:拉杆螺纹的直径为M20。
5-5 解:该螺栓连接为受横向工作载荷的紧螺栓连接,其强度条件为:[]215.2ae F σσπd =≤0Ra CF F F zmf=≥,查教材表5-2可知,M16的螺栓的小径d 1=13.835mm 。
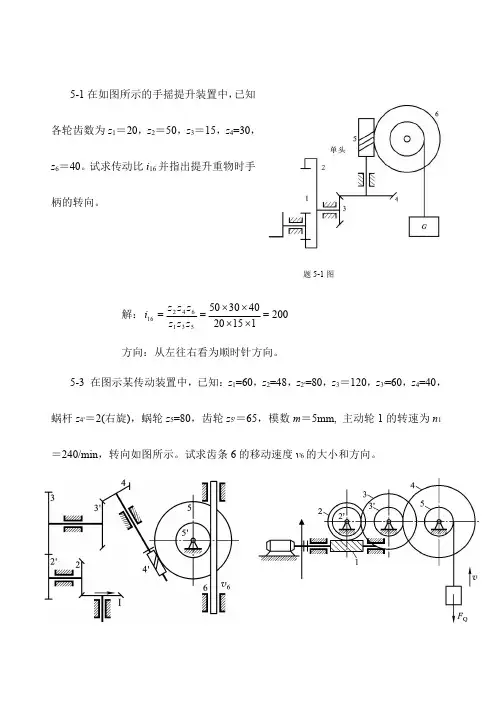
5-1在如图所示的手摇提升装置中,已知各轮齿数为z 1=20,z 2=50,z 3=15,z 4=30,z 6=40。
试求传动比i 16并指出提升重物时手柄的转向。
题5-1图解:2001152040305053164216=⨯⨯⨯⨯==z z z z z z i 方向:从左往右看为顺时针方向。
5-3在图示某传动装置中,已知:z 1=60,z 2=48,z 2'=80,z 3=120,z 3'=60,z 4=40,蜗杆z 4'=2(右旋),蜗轮z 5=80,齿轮z 5'=65,模数m =5mm,主动轮1的转速为n 1=240/min ,转向如图所示。
试求齿条6的移动速度v 6的大小和方向。
题5-3图题5-4图解:齿条的移动方向如图所示,其轮系传动比为:322608060804012048'4'3'2154325115=⨯⨯⨯⨯⨯⨯===z z z z z z z z n n i 则齿轮5’的转速为:min /5.7322401515r i n n ===又齿轮5’分度圆直径为:mm m z d 325565'5'5=⨯==所以齿条的移动速度为:s m n d v /128.0600005.73251000605'56=⨯⨯=⨯=ππ5-4如图所示为一电动卷扬机的传动简图。
已知蜗杆1为单头右旋蜗杆,蜗轮2的齿数z 2=42,其余各轮齿数为z 2'=18,z 3=78,z 3'=18,z 4=55;卷筒5与齿轮4固联,其直径D 5=400mm ,电动机转速。
n 1=1500r/min ,试求:(1)转筒5的转速n 5的人小和重物的移动速度v 。
(2)提升重物时,电动机应该以什么方向旋转?解:1.其轮系传动比为:11.5569500518181557842'3'214324114==⨯⨯⨯⨯===z z z z z z n n i 则齿轮4的转速(即转筒5的转速)为:min /70.211.556150014145r i n n n ====所以重物的移动速度为:s m n D v /057.0600007.2400100060556=⨯⨯=⨯=ππ5-5在如图所示周转轮系中,已知各轮齿数为z 1=60,z 2=20,z 2'=20,z 3=20,z 4=20,z 5=100,试求传动比i 41。
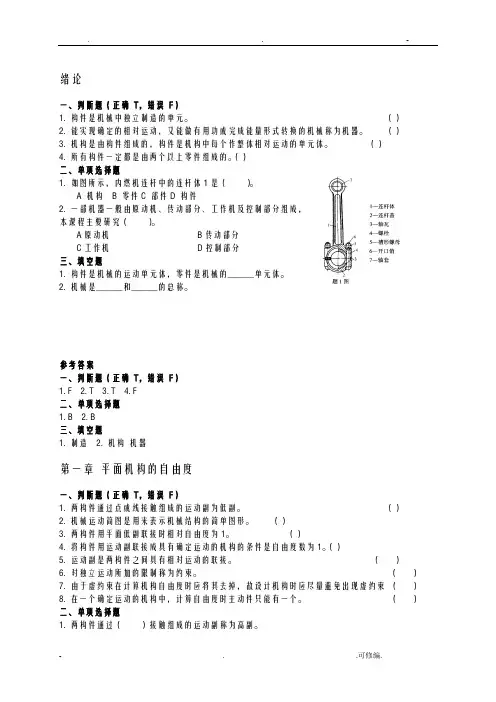
绪论一、判断题(正确T,错误F)1. 构件是机械中独立制造的单元。
()2. 能实现确定的相对运动,又能做有用功或完成能量形式转换的机械称为机器。
()3. 机构是由构件组成的,构件是机构中每个作整体相对运动的单元体。
()4. 所有构件一定都是由两个以上零件组成的。
()二、单项选择题1. 如图所示,内燃机连杆中的连杆体1是()。
A 机构B 零件C 部件D 构件2. 一部机器一般由原动机、传动部分、工作机及控制部分组成,本课程主要研究()。
A原动机B传动部分C工作机D控制部分三、填空题1. 构件是机械的运动单元体,零件是机械的______单元体。
2. 机械是______和______的总称。
参考答案一、判断题(正确T,错误F)1. F2. T3. T4. F二、单项选择题1. B2. B三、填空题1. 制造2. 机构机器第一章平面机构的自由度一、判断题(正确T,错误F)1. 两构件通过点或线接触组成的运动副为低副。
()2. 机械运动简图是用来表示机械结构的简单图形。
()3. 两构件用平面低副联接时相对自由度为1。
()4. 将构件用运动副联接成具有确定运动的机构的条件是自由度数为1。
()5. 运动副是两构件之间具有相对运动的联接。
()6. 对独立运动所加的限制称为约束。
()7. 由于虚约束在计算机构自由度时应将其去掉,故设计机构时应尽量避免出现虚约束()8. 在一个确定运动的机构中,计算自由度时主动件只能有一个。
()二、单项选择题1. 两构件通过()接触组成的运动副称为高副。
A 面B 点或线C 点或面D 面或线2. 一般情况下,门与门框之间存在两个铰链,这属于()。
A复合铰链B局部自由度C虚约束 D 机构自由度3. 平面机构具有确定运动的条件是其自由度数等于()数。
A 1B 从动件C 主动件D 04. 所谓机架是指()的构件。
A 相对地面固定B 运动规律确定C 绝对运动为零D 作为描述其他构件运动的参考坐标点5. 两构件组成运动副必须具备的条件是两构件()。
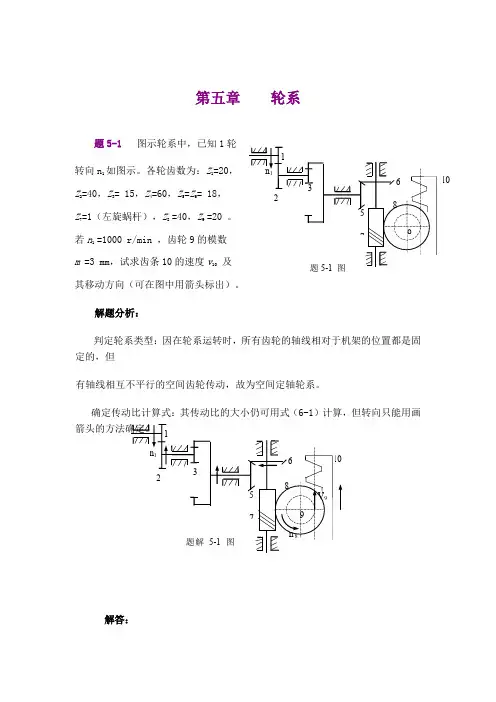
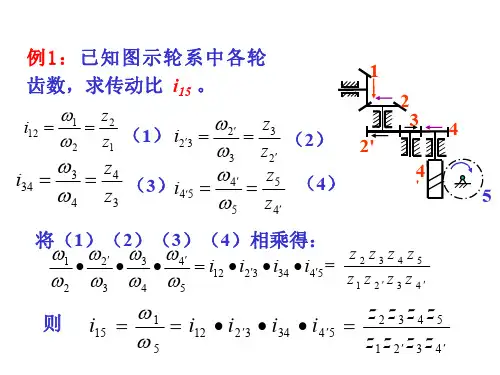
第五章轮系题5-1图示轮系中,已知1轮Array如图示。
各轮齿数为:Z1=20,转向n1Z=40,Z3= 15,Z4=60,Z5=Z6= 18,2Z=1(左旋蜗杆),Z8=40,Z9 =20 。
7若n1 =1000 r/min ,齿轮9的模数m =3 mm,试求齿条10的速度v及10其移动方向(可在图中用箭头标出)。
解题分析:判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的位置都是固定的,但有轴线相互不平行的空间齿轮传动,故为空间定轴轮系。
确定传动比计算式:其传动比的大小仍可用式(6-1)计算,但转向只能用画解答:1.确定齿条10的速度v 10 大小∵ 320118152040186040753186428118=⨯⨯⨯⨯⨯⨯===z z z z z z z z n n i∴min /125.3min /320100018189r r i n n n ====s /mm .s /mm .n mz n d v v 82960125320360609999910=⨯⨯⨯π=π=π==2.确定齿条10移动方向根据圆柱齿轮传动、锥齿轮传动及蜗杆传动的转向关系,可定出蜗轮转向n 8为逆时针方向,齿轮9与蜗轮8同轴,n 9 = n 8,齿条10线速度v 10与9轮线速度v 9方向一致,故齿条10的移动方向应朝上(↑)题5-2 图示轮系中,已知蜗杆1的齿数为Z 2= 50 ;蜗杆2′为单头右旋蜗杆, 蜗轮3的齿数为Z 3=40;其余各轮齿 数为;Z 3′=30,Z 4 = 20 ,Z 4′ = 26 , Z 5 =18,Z 5′=28,Z 6=16,Z 7=18。
要求:(1) 分别确定蜗轮2、蜗轮3的 轮齿螺旋线方向及转向n 2、n 3 ;(2) 计算传动比i 17 ,并确定齿 轮7的转向n 7。
解题分析:判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的 位置都是固定的,但有轴线相互不 平行的空间齿轮传动,故为空间定 轴轮系。
机械设计基础答案(共31页) -本页仅作为预览文档封面,使用时请删除本页-《机械设计基础》作业答案第一章平面机构的自由度和速度分析1-11-21-31-41-5自由度为:11 19211)0192(73')'2(3=--=--+⨯-⨯=--+-=FPPPnFHL 或:1182632 3=-⨯-⨯=--=HLPPnF1-6自由度为11)01122(93')'2(3=--+⨯-⨯=--+-=FPPPnFHL 或:11 22241112832 3=--=-⨯-⨯=--=HLPPnF1-10自由度为:1128301)221142(103')'2(3=--=--⨯+⨯-⨯=--+-=F P P P n F H L 或:122427211229323=--=⨯-⨯-⨯=--=HL P P n F 1-1122424323=-⨯-⨯=--=HL P P n F1-13:求出题1-13图导杆机构的全部瞬心和构件1、3的角速度比。
1334313141P P P P ⨯=⨯ωω141314133431==P P P P ωω1-14:求出题1-14图正切机构的全部瞬心。
设s rad /101=ω,求构件3的速度3v 。
s mm P P v v P /20002001013141133=⨯===ω 1-15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比21/ωω。
构件1、2的瞬心为P 12P 24、P 14分别为构件2与构件1相对于机架的绝对瞬心1224212141P P P P ⨯=⨯ωω 1212141224212r r P P P P ==ωω 1-16:题1-16图所示曲柄滑块机构,已知:s mm l AB /100=,s mm l BC /250=,s rad /101=ω,求机构全部瞬心、滑块速度3v 和连杆角速度2ω。
第五章 轮系及其设计习题52 在题图52所示的手摇提升装置中,已知各轮齿数为:z 120,z 250,z 315,z 430,z 640,z 718,z 851,蜗杆z 51,右旋,试求传动比i 18并确定提升重物时手柄的转向。
题图5255 在题图55所示的压榨机中,螺杆4和5为一对旋向相反的螺杆,其螺距分别为6mm 和3mm ,螺杆5旋在螺杆4内,螺杆4与齿轮3固联在一起,螺杆5与盘B 固联在一起,盘B 插在框架两侧的槽内只能沿框架上下移动。
已知各轮齿数为z 118,z 224,z 224,z 364,试求为使盘B 下降19mm ,轴A 应转多少转,转向如何题图55答案:转!5-6题图5-6所示为手动起重葫芦,已知z l=z2=10,z2=20,z3=40。
设由链轮A至链轮B的传动效率为= 0. 9,为了能提升Q =1000N的重物,求必须加在链轮A上的圆周力P。
57题图57所示为一灯具的转动装置,已知:n1min,方向如图示,各轮齿数为z160,z2z230,z3 z440,z5120。
求灯具箱体的转速及转向。
5-11 在题图5-11所示的三爪电动卡盘的传动轮系中,各轮齿数为z1=6,z2=z2=25,z3=57,z4=56,求传动比i14。
题图511512 在题图512所示的自行车里程表机构中,C为车轮轴,P为里程表指针。
已知各轮齿数为z117,z323,z419,z420,z524。
设轮胎受压变形后车轮的有效直径为0.7m,当自行车行驶1km时,表上的指针刚好回转一周。
试求齿轮2的齿数。
513 在题图513所示的双螺旋桨飞机的减速器中,已知z126,z220,z430,z518,n115000r/min,求螺旋桨P、Q的转速n P、n Q及转向。
题图513516 题图516所示的减速器中,已知蜗杆1和5的头数均为1,蜗杆1为左旋,蜗杆5为右旋,各轮齿数为z 1=101,z2=99,z 2=z4,z 4=100,z 5=100。
《机械设计基础》习题解答机械工程学院目录第0章绪论-------------------------------------------------------------------1 第一章平面机构运动简图及其自由度----------------------------------2 第二章平面连杆机构---------------------------------------------------------4 第三章凸轮机构-------------------------------------------------------------6 第四章齿轮机构------------------------------------------------------- -----8 第五章轮系及其设计------------------------------------------------------19 第六章间歇运动机构------------------------------------------------------26 第七章机械的调速与平衡------------------------------------------------29 第八章带传动---------------------------------------------------------------34 第九章链传动---------------------------------------------------------------38 第十章联接------------------------------------------------------------------42 第十一章轴------------------------------------------------------------------46 第十二章滚动轴承---------------------------------------------------------50 第十三章滑动轴承-------------------------------------------- ------------ 56 第十四章联轴器和离合器------------------------------- 59 第十五章弹簧------------------------------------------62 第十六章机械传动系统的设计----------------------------65第0章绪论0-1机器的特征是什么?机器和机构有何区别?[解] 1)都是许多人为实物的组合;2)实物之间具有确定的相对运动;3)能完成有用的机械功能或转换机械能。
第5章 轮系习题与参考答案一、复习思考题1.为什么要应用轮系?试举出几个应用轮系的实例?2.何谓定轴轮系?何谓周转轮系?行星轮系与差动轮系有何区别? 3.什么叫惰轮?它在轮系中有什么作用?4.定轴轮系的传动比如何计算?式中(-1)m 有什么意义? 5.定轴轮系末端的转向怎样判别?6.如果轮系的末端轴是螺旋传动,应如何计算螺母的移动量?二、填空题1.由若干对齿轮组成的齿轮机构称为 。
2.根据轮系中齿轮的几何轴线是否固定,可将轮系分 轮系、 轮系和 轮系三种。
3.对平面定轴轮系,始末两齿轮转向关系可用传动比计算公式中 的符号来判定。
4.行星轮系由 、 和 三种基本构件组成。
5.在定轴轮系中,每一个齿轮的回转轴线都是 的。
6.惰轮对 并无映响,但却能改变从动轮的 方向。
7.如果在齿轮传动中,其中有一个齿轮和它的 绕另一个 旋转,则这轮系就叫周转轮系。
8.旋转齿轮的几何轴线位置均 的轮系,称为定轴轮系。
9.轮系中 两轮 之比,称为轮系的传动比。
10.加惰轮的轮系只能改变 的旋转方向,不能改变轮系的 。
11.一对齿轮的传动比,若考虑两轮旋转方向的同异,可写成±==21n n i ——。
12.定轴轮系的传动比,等于组成该轮系的所有 轮齿数连乘积与所有 轮齿数连乘积之比。
13.在周转转系中,凡具有 几何轴线的齿轮,称中心轮,凡具有 几何轴线的齿轮,称为行星轮,支持行星轮并和它一起绕固定几何轴线旋转的构件,称为 。
14.周转轮系中,只有一个 时的轮系称为行星轮系。
15.转系可获得 的传动比,并可作 距离的传动。
16.转系可以实现 要求和 要求。
17.转系可以运动,也可以运动。
18.采用周转轮系可将两个独立运动为一个运动,或将一个独立的运动成两个独立的运动。
19.差动轮系的主要结构特点,是有两个。
20.周转轮系结构尺寸,重量较。
21.周转轮系可获得的传动比和的功率传递。
三、判断题1.转系可分为定轴轮系和周转轮系两种。
第五章轮系题5-1图示轮系中,已知1轮Array如图示。
各轮齿数为:Z1=20,转向n1Z=40,Z3= 15,Z4=60,Z5=Z6= 18,2Z=1(左旋蜗杆),Z8=40,Z9 =20 。
7若n1 =1000 r/min ,齿轮9的模数m =3 mm,试求齿条10的速度v及10其移动方向(可在图中用箭头标出)。
解题分析:判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的位置都是固定的,但有轴线相互不平行的空间齿轮传动,故为空间定轴轮系。
确定传动比计算式:其传动比的大小仍可用式(6-1)计算,但转向只能用画解答:1.确定齿条10的速度v 10 大小∵320118152040186040753186428118=⨯⨯⨯⨯⨯⨯===z z z z z z z z n n i∴min /125.3min /320100018189r r i n n n ====s /mm .s /mm .n mz n d v v 82960125320360609999910=⨯⨯⨯π=π=π==2.确定齿条10移动方向根据圆柱齿轮传动、锥齿轮传动及蜗杆传动的转向关系,可定出蜗轮转向n 8为逆时针方向,齿轮9与蜗轮8同轴,n 9 = n 8,齿条10线速度v 10与9轮线速度v 9方向一致,故齿条10的移动方向应朝上(↑)题5-2 图示轮系中,已知蜗杆1的齿数为Z 2= 50 ;蜗杆2′为单头右旋蜗杆, 蜗轮3的齿数为Z 3=40;其余各轮齿 数为;Z 3′=30,Z 4 = 20 ,Z 4′ = 26 , Z 5 =18,Z 5′=28,Z 6=16,Z 7=18。
要求:(1) 分别确定蜗轮2、蜗轮3的 轮齿螺旋线方向及转向n 2、n 3 ;(2) 计算传动比i 17 ,并确定齿 轮7的转向n 7。
解题分析:判定轮系类型:因在轮系运转时,所有齿轮的轴线相对于机架的 位置都是固定的,但有轴线相互不 平行的空间齿轮传动,故为空间定 轴轮系。
确定传动比计算式:空间定轴 轮系的传动比大小仍可用教材(5-1) 式计算,但转向只能用画箭头的方法 确定。
解答:1.确定蜗轮2、蜗轮3的轮齿 螺旋线方向:根据蜗杆传动正确啮合条件21βγ= ,32βγ=' ,可确定蜗轮2为左旋,蜗轮3为右旋。
蜗轮2、3转向:根据 蜗轮蜗杆的相对运动关系,确定转向n 2、n 3如题解5-2 图所示。
2.传动比i 17:7.2962826301218182040506543217654327117=⨯⨯⨯⨯⨯⨯⨯⨯===''''z z z z z z z z z z z z n n i3.7轮的转向:在题5 - 2 图上用画箭头的方法,可定出n 7 的方向朝上(即↑),因7轮轴线与蜗杆1轴线平行,故也可说n 7与n 1转向相同。
题5-3 已知轮1转速n 1 =140 r/min ,Z 1=40,Z 2 =20。
求:(1)轮3齿数 Z 3 ;(2)当n 3 = -40 r/min 时,系杆H 的转速题5-3 图n H 的大小及方向;(3)当n H = 0 时齿轮3的转速n 3 。
解题分析:1.由轮系中三个基本构件的同心条件,确定Z 3 ;2.n H ≠ 0时,在轮系运转中,齿轮2的轴线绕轮1、3及系杆H 的轴线转动,其自由度为2,故为差动轮系, 系杆转速须通过原差动轮系的转化轮系(假想定轴轮系)传动比计算公式(5-2)式求得;3.n H = 0时,则为定轴轮系, 其传动比用(5-1)式计算。
解答:1.求Z 3 : 根据图示轮系的同心条件,其中心距应满足ɑ12=ɑ32 ,而标准齿轮传动,其相互啮合的齿轮模数相等, 故:r 1 + r 2 = r 3 - r r 3r + 2r 2 mz 3 = mz 1 + 2mz 2z 3 = z 1 + 2z 2 = 40 + 2×20 = 802.当n 3 = -40r/min 时,求n H()240804014021321313113-=-=-=---=--==z z zz n n n n n n n n iH H H H H H Hn H = 20 r/min 与 n 1 转向相同。
3.当n H = 0时,求n 3 :当n H = 0时,图示轮系成为定轴轮系,所以24080133113-=-=-==z z n n imin /70min /21401313r r i n n -=-==即 n 3与 n 1 转向相反题5-4 图示为锥齿轮组成的周转轮系。
已知:Z 1 =Z 2=17, Z 2′= 30,Z 3= 45 ,若1轮转速n 1 =200 r/min 。
(1)确定系杆的转速n H 的大小和转向;(2)试问能否用 教材式(5-22 ?为什么?解题分析:判定轮系类型: 因在轮系运转时,齿轮2和2′的轴线相对于机架的位置不固定,且齿轮3固定不转动,该轮系为由锥齿轮组成的行星轮系;确定传动比计算式:系杆转速n H 须通过行星轮系的转化轮系(假想定轴轮系)传动比公式 (5-2)求得。
注意:因3轮与1轮轴线平行,HH n n 13和转向关系可在其转化轮系中,用画箭头方法确定(题解5-4图中虚线箭头所示),转化轮系传动比公式中,齿数比前应代入符号,HH n n 13和 同向时用“+” 代入,相反时用“-” 代入。
解答:1.求解系杆转速n H 大小,确定n H 的转向因为H H n n 13和 同向(题解6-4图所示),故其转化轮系传动比公式:5.130174517021321313113=⨯⨯==--=--=='z z z z n n n n n n n n n iH H H H H H H400min /5.0200min /5.11200113111-=-=-=-==r r i n i n n H H H r/minn H 的转向:因i 1H 为“-”值,所以n H 与n 1转向相反。
2.不能用H i 12计算式求解n 2 。
因轮2的轴线与中心轮1和系杆H 的轴线不平行,它们的角速度不能按代数量进行加减,即: H H ωωω-≠22,故不能用Hi 12 的计算式求解n 2 。
题5-5 图示万能刀具磨床工作台的进给装置中,运动经手柄输入, 由丝杠输出,已知单头丝扛螺距L = 5 mm ,试计算手柄转动一周时工作 台的进给量S 。
解题分析:磨床工作台进给装置是由齿轮1(固定不转动),双联齿轮2和2′(轴线相对于机架的位置不固定), 齿轮3及手柄H 组成的行星轮系。
要求解手柄转动一周时工作台的进给量S ,需先求解n H =1 r/min 时齿轮3的转速n 3,n 3可根据传动比i H3求出。
题5-5 图解答:1.行星轮系的转化轮系(假想定轴轮系)传动比公式:10919201918102312331331=⨯⨯=⋅⋅=+-=--=--='z z z z i n n n n n n n i H H H H H H2. 齿轮3的转速n 3:()r/min10r/min 1091113133.i n i n n HH H H =⎪⎭⎫ ⎝⎛-⨯=-⋅=⋅=3.工作台的进给量S :单头丝杠转一周,工作台前进一个螺距L ,丝杠转n 3转时,m m m m 501053..n L s =⨯=⋅=题5-6 图示轮系中,已知各轮齿数为:Z 1= 20,Z 2= 34,Z 3 = 18,Z 4= 36,Z 5= 78,Z 6 = Z 7 = 26。
试求:传动比i 1H 。
题5-6图 题解5-6图 解题分析:1.判定轮系类型:因齿轮6的轴线绕别的齿轮轴线作圆周运动,轮系中有 周转轮系存在,故该轮系为复合轮系。
3.求解方法:分别列出各基本轮系传动比计算式,将各计算式联立求解可得复合轮系的传动比 。
解答:1.定轴轮系1-2-3-4传动比计算式:()4.3182036341314224114=⨯⨯=-==z z z z n n i2.差动轮系5-6-7-H 转化轮系传动比计算式:()31782665761757557-=-=-=--==z z z z n n n n n n iH H H HH3.建立两基本轮系之间的联系:∵ 轮1和轮7共轴,∴ n 7 = n 1轮4和轮5为双联齿轮,所以,14145i n n n ==。
传动比:125.211==HH n n i题5-7 图示轮系中,已知各轮齿数为:Z 1=Z 2′=25,Z 2=Z 3=Z 5=20, Z 4=100。
试求:传动比i 15 。
解题分析:1.判定轮系类型: 因齿轮2和2′的轴线绕别的齿轮轴线作圆周运动,轮系中有周转轮系存在,故该轮系为复合轮系。
3.求解方法:分别列出各基本轮系传动比计算式,将各计算式联立求解可得复合轮系的传动比。
解答:1.行星轮系1-2-2′-3-H 的转化轮系传动比计算式:()251625252020121322313113=⨯⨯=-=--=='z z z z n n n n n n iH H H H H2.定轴轮系4-5传动比计算式:()511002014515445-=-=-==z zn n i3.建立两基本轮系之间的联系:n 3= 0 ,n H = n 4题解5-7 图题5-7 图求解可得:12595115-==n n i , n 5与n 1转向相反。
题5-8 图示轮系中。
已知各轮齿数为:Z 1 = Z 2 = Z 2′=24,Z 3 = 72,Z 4 = 89,Z 5= 95,Z 6 = 24,Z 7 = 30,试求:A 轴与B 轴之间的传动比i AB 。
解题分析:1.判定轮系类型:因齿轮2和2′的轴线绕别的齿轮轴线作圆周运动,轮系中有周转轮系存在,故该轮系为复合轮系。
3.求解方法:分别列出各基本轮系传动比计算式,将各计算式联立求解可解答:1.差动轮系1-2(2′)-3-H 的转化轮系传动比计算式:()32472131313113-=-=-=--==z z n n n n n n iH H H H H2.定轴轮系5-6传动比计算式:9524566556-=-==z z n n i 3.定轴轮系4-7传动比计算式:8930477447-=-==z z n n i4.各基本轮系之间的联系:n B =n 1 ,n A =n 6 =n 7 ,n 3 =n 4,n H = n 5 5.联立求解i AB :题5-9 在图示轮系中,已知各轮齿数为:Z 1=Z 2'=20,Z 2 =Z 3=40,Z 4=100,Z 5=Z 6=Z 7 = 30,求:传动比i 17 。
题5-9图 解题分析:1.判定轮系类型:因齿轮3的轴线绕别的齿轮轴线作圆周运动,轮系中有周转轮系存在,故该轮系为复合轮系。