工具坐标系建立培训
- 格式:ppt
- 大小:2.40 MB
- 文档页数:9



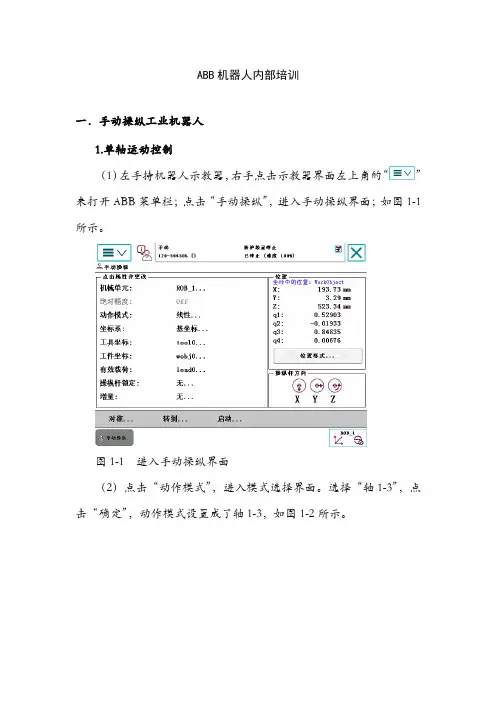
ABB机器人内部培训一.手动操纵工业机器人1.单轴运动控制(1)左手持机器人示教器,右手点击示教器界面左上角的“”来打开ABB菜单栏;点击“手动操纵”,进入手动操纵界面;如图1-1所示。
图1-1 进入手动操纵界面(2)点击“动作模式”,进入模式选择界面。
选择“轴1-3”,点击“确定”,动作模式设置成了轴1-3,如图1-2所示。
图1-2 模式选择界面(3)移动示教器上的操纵杆,发现左右摇杆控制1轴运动,前后摇杆控制2轴运动,逆时针或顺时针旋转摇杆控制3轴运动。
(4)点击“动作模式”,进入模式选择界面。
选择“轴4-6”,点击“确定”,动作模式设置成了轴4-6,如图1-3所示。
图1-3 “动作模式”的选择(5)移动示教器上的操纵杆,发现左右摇杆控制4轴运动,前后摇杆控制5轴运动,逆时针或顺时针旋转摇杆控制6轴运动。
【提示】轴切换技巧:示教器上的按键能够完成“轴1-3”和“轴4-6”轴组的切换。
2.线性运动与重定位运动控制(1)点击“动作模式”,进入模式选择界面。
选择“线性”,点击“确定”,动作模式设置成了线性运动,如图1-4所示。
(2)移动示教器上的操纵杆,发现左右摇杆控制机器人TCP点左右运动,前后摇杆控制机器人TCP点前后运动,逆时针或顺时针旋转摇杆控制机器人TCP点上下运动。
图1-4 线性运动模式操纵界面(3)点击“动作模式”,进入模式选择界面。
选择“重定位”,点击“确定”,动作模式设置成了重定位运动,如图1-5所示。
图1-5 “重定位”动作模式的选择(4)移动示教器上的操纵杆,发现机器人围绕着TCP运动。
3.工具坐标系建立工业机器人是通过末端安装不同的工具完成各种作业任务。
要想让机器人正常作业,就要让机器人末端工具能够精确地达到某一确定位姿,并能够始终保持这一状态。
从机器人运动学角度理解,就是在工具中心点(TCP)固定一个坐标系,控制其相对于基座坐标系或世界坐标系的姿态,此坐标系称为末端执行器坐标系(Tool/Terminal Control Frame,TCF),也就是工具坐标系。


初级培训作业答案基础题:(40’)1.为什么在示教机器人坐标前要建立自己的工件坐标系和工具坐标系?(8’)Answer:建立自己的工具坐标系有两个好处:1. 方便我们在做机器人重定位旋转时,可以很方便的让机器人绕着我们定义的点做空间旋转,从而很方便的把机器人调整到我们需要的姿态。
2. 更换工具时,只要按照第一个工具做TCP的方法重新做一下新的TCP,即可不需要重新示教机器人轨迹。
从而很方便的实现轨迹的纠正。
建立工件坐标系也有两个好处:1.方便我们在机器人现行运行时,按照我们自己建的坐标系的方向做线性运动,而不拘泥于系统提供的基座坐标系和世界坐标系这几种固定的坐标系。
2.当工作台面与机器人之间的位置发生相对移动时,只需要更新工件坐标系,即可不需要重新示教机器人轨迹,从而很方便的实现轨迹的纠正。
2.现在有下面的情况:假如有一信号DO_EStop,一旦机器人处在急停状态,这个信号就为1,急停一旦解除,此信号立即为0,如何实现?但是现在PLC要求我们,机器人急停时要给他发个信号DO_RobEstop=0,急停解除时DO_RobEstop=1,与我们机器人内部的相反,如何实现?(10’)Answer:1.进入控制面板-配置-system output :点击添加,信号:选择上面建立好的DO_EStop(必须先建好),status:选择Emergency stop。
就实现了系统状态与一个信号的关联。
(如下图)2.在Cross connection 里面添加一项,做DO_RobEstop 与DO_EStop 的关联,但是关联时,DO_EStop要取反,即Invert Actor1 要选择Yes。
3.Z xx(xx代表数字) 和fine 的区别?(5’)Answer:Z能让轨迹平滑,但是不到达目标点,fine无条件到达目标点,并且到达目标点的速度为0.4.假如有以下搬运程序:PROC main()MoveL P1,v100,z10,tool1\wobj:=Mywobj;MoveL P2,v100,z10,tool1\wobj:=Mywobj;Set DO_OpenGrip;Reset DO_CloseGrip;ENDPROC假设机器人整抓着搬运的工件,要放到P2的位置,然后松开夹具,将工件放下;控制夹具的是双控电磁阀(DO_OpenGrip=1,DO_CloseGrip=0时夹具打开)。
cad培训的策划书3篇篇一《CAD 培训策划书》一、培训背景随着科技的不断发展,CAD(计算机辅助设计)技术在各个领域的应用越来越广泛。
为了满足市场需求,提高学员的 CAD 技能水平,特举办此次 CAD 培训。
二、培训目标1. 让学员掌握 CAD 软件的基本操作和应用技巧。
2. 提高学员的 CAD 绘图能力和效率。
3. 培养学员的团队合作精神和解决实际问题的能力。
三、培训内容1. CAD 基础知识讲解,包括软件界面、基本操作、坐标系等。
2. CAD 二维绘图,如直线、圆、矩形、多边形等的绘制。
3. CAD 三维建模,如实体建模、曲面建模等。
4. CAD 图纸编辑和标注,包括尺寸标注、文字标注等。
5. CAD 与其他软件的集成,如与办公软件的协作。
四、培训方式1. 线下培训,在固定地点进行集中授课。
2. 理论与实践相结合,注重学员的实际操作练习。
3. 配备专业的教师进行指导和答疑。
五、培训时间和地点1. 培训时间:[具体时间]2. 培训地点:[详细地址]六、培训费用培训费用为[具体金额],包括培训教材、证书费用等。
学员可通过现金、银行转账等方式支付。
七、培训证书完成培训并通过考核的学员,将获得由[培训机构名称]颁发的 CAD 培训证书。
八、报名方式1. 填写报名表格,发送至[指定]。
2. 联系培训负责人,进行电话报名。
3. 直接前往培训机构报名。
九、注意事项1. 学员需按时参加培训,遵守培训纪律。
2. 培训机构将提供必要的培训设备和工具,学员无需自带。
3. 如有特殊情况无法参加培训,请提前[提前时间]通知培训机构。
4. 培训期间,学员需注意个人安全,如有身体不适,请及时告知教师。
十、联系方式培训机构地址:[详细地址]联系电话:[电话号码]电子:[指定]篇二CAD 培训策划书一、培训背景随着科技的不断发展,CAD(计算机辅助设计)技术在各个领域的应用越来越广泛。
为了满足市场需求,提高学员的 CAD 技能水平,特举办此次 CAD 培训。
三坐标培训计划范文一、培训目标本次培训旨在提高学员对三坐标测量仪的理论和实际操作水平,使其能够熟练掌握三坐标测量仪的使用方法,能够准确进行测量和数据处理,为企业质量控制工作提供有力保障。
二、培训内容1. 三坐标测量仪的原理和结构2. 三坐标测量仪的操作方法3. 测量基准设置及基准测量4. 工件测量及数据处理5. 质量控制与质量管理三、培训时间本次培训为期一周,每天上午9:00-12:00,下午13:30-17:00,共计60个课时。
四、培训流程第一天:三坐标测量仪的原理和结构1. 授课内容:介绍三坐标测量仪的原理和结构,讲解三坐标测量仪的工作原理和各部件功能。
2. 实践操作:学员进行三坐标测量仪的开机、关机和基本操作练习。
第二天:三坐标测量仪的操作方法1. 授课内容:讲解三坐标测量仪的操作方法,包括工件夹具安装、探头校准、坐标系建立等操作步骤。
2. 实践操作:学员进行三坐标测量仪的基本操作练习,包括工件的定位、测量等操作。
第三天:测量基准设置及基准测量1. 授课内容:介绍测量基准的设置方法和基准测量的步骤,讲解如何进行基准的建立和校准。
2. 实践操作:学员进行测量基准的设置和基准测量的实际操作练习。
第四天:工件测量及数据处理1. 授课内容:讲解工件测量的步骤和注意事项,介绍测量数据的处理方法和数据分析技巧。
2. 实践操作:学员进行工件测量和数据处理的实际操作练习,掌握数据采集和分析技能。
第五天:质量控制与质量管理1. 授课内容:介绍质量控制的基本概念和方法,讲解如何利用三坐标测量仪进行质量控制和质量管理。
2. 实践操作:学员进行质量控制和质量管理的实际操作练习,学会利用三坐标测量仪进行质量监测和数据分析。
第六天:综合实践1. 综合实践:学员进行综合实践操作,包括复杂工件测量、数据处理和质量管理的综合应用。
2. 实际案例分析:对一些工件测量的实际案例进行分析和讨论,总结经验和教训。
第七天:考核和总结1. 考核内容:进行理论和实际操作考核,检验学员的学习效果。