机械手臂与计算机视觉检测系统
- 格式:pdf
- 大小:446.78 KB
- 文档页数:10
机械臂柔顺运动控制技术研究机械臂柔顺运动控制技术研究:走向精确和高效的未来近年来,机械臂的应用范围越来越广泛,从工业生产线到医疗手术室再到家庭助手,机械臂都扮演着重要的角色。
然而,传统的机械臂在某些应用场景下存在一定的局限性,例如在与人类合作或对复杂环境的适应性上。
为了克服这些问题,机械臂柔顺运动控制技术应运而生,其致力于提高机械臂的柔顺性、精确性和高效性。
本文将探讨该技术的研究进展和未来发展方向。
柔顺运动控制技术是指机械臂通过具有精确力传递和高灵活性的机械结构,实现类似于人类手臂的柔软运动。
这种运动可以应对复杂的环境要求,比如与人类进行合作或在狭小空间中操作。
在传统的机械臂中,刚性结构和刚性控制往往导致运动精度和灵活性的不足。
而柔顺运动控制技术通过引入弹性材料、柔性机械结构和感知反馈控制算法等手段,有效提高了运动表现。
首先,柔性机械结构是实现机械臂柔顺运动控制的核心之一。
传统机械臂的末端执行器通常由刚性材料制成,限制了运动灵活性和安全性。
而柔性材料的引入可以提供更自由的运动范围,同时降低了与环境或操作对象接触时的风险。
例如,研究人员已经成功开发了基于人工肌肉和弹性材料的机械臂,实现了精确、连续和逼真的运动。
这种柔性机械结构的研究对于提高机械臂在协作机器人、医疗手术等领域的应用潜力具有重要意义。
其次,柔顺运动控制技术需要配备高效的感知反馈系统,以提供准确的运动信息并对环境变化进行实时响应。
在复杂的应用场景中,机械臂需要不断地感知和分析周围环境的信息,以便根据需要调整运动轨迹和力量输出。
近年来,计算机视觉和力传感器等技术的快速发展为实现这一目标提供了强有力的支持。
机械臂可以通过视觉系统检测周围物体的位置、形状和姿态,并通过力传感器感知外力作用下的变形情况。
这种感知反馈系统的引入使机械臂能够更好地适应环境需求和与人类进行交互。
从实际应用角度来看,机械臂柔顺运动控制技术在医疗、家庭助理和协作机器人等领域具有巨大的潜力。
摘要随着自动化生产程度的提高,PLC 在生产控制系统中的应用也越来越广泛。
本设计是基于西门子公司S7-300可编程控制器,设计了机械手臂PLC控制的自动控制系统。
该工艺过程主要是完成对电机的控制。
系统主要由变频器、转台电机、液压泵电机、采样头电机、输送机、破碎机、缩分机、收集器以及控制系统组成。
通过对系统主电路、控制电路设计,给出了机械手臂自动控制系统完整的硬件接线图和流程图。
根据机械手臂的生产工艺要求,设计并使用STEP 7编制了一套适用于该生产工艺的梯形图。
利用Simens公司的Wincc完成了机械手臂的监控界面。
本设计过程中涉及较多的开关量输入输出点,故选用配置灵活的模块式结构PLC 以提高系统的可靠性与处理效率。
关键词: S7-300;机械手臂;自动控制AbstractWith the improvement of automatic production, the PLC application in production control system is also more and more broad. This design based on the Siemens S7-300 programmable controller, PLC controlled robotic arm designed automatic control system. The key is to complete the process of motor control. System mainly consists of inverter, turntable motor, hydraulic pump motor, the sampling hea d and the motor, conveyor, crusher, reduced extension, the collector and the control system.Through the design of system main circuit and control circuit, gives the complete hardware of the control system wiring diagrams and flow charts.According to the mechanical arm's technique of production's request, Design and use STEP 7 for the preparation of a ladder in the production process. Wincc by Simens company completed a mechanical arm monitoring interface.This design involves more switches quantity input output spot, the simulation quantity input output spot, therefore selects input output disposition nimble module type structure PLC to enhance the system the reliability and the processing efficiency.Key Words:S7-300;Mechanical arm;Automatic control目录第一章绪论 (1)1.1设计背景 (1)1.2设计目的 (1)1.3国内外研究现状和趋势 (2)1.4设计原则 (3)第二章系统方案设计 (4)2.1设计依据 (4)2.2各部分功能分述 (5)2.2.1 采样过程 (5)2.2.2 制样过程 (5)2.3控制方案的比较、论证和确定 (5)2.3.1 方案的比较 (5)2.3.2 方案论证及确定 (8)2.4系统结构图 (9)第三章系统硬件设计 (10)3.1设计依据 (10)3.2硬件设计 (10)3.3电动机选型 (14)3.4变频器设计 (15)3.4.1 概述 (15)3.4.2 变频器分类 (15)3.4.3 变频器的组成、工作原理及控制方式 (15)3.4.4 变频器选择 (18)3.5硬件地址配置 (20)3.6控制系统模块选择 (22)3.6.1 设计依据 (22)3.6.2 S7-300系列PLC组成 (23)3.6.3 S7-300PLC特点 (24)3.6.4 模块选择 (24)第四章控制系统软件设计 (32)4.1软件设计分析 (32)4.2系统流程图 (32)4.3STEP7编程过程 (37)4.3.1 建立工程 (37)4.3.2 硬件配置 (37)4.3.3 STEP 7编程 (38)第五章组态画面设计 (40)5.1组态软件概述 (40)5.2WINCC的介绍 (40)5.3画面组态 (40)5.3.1 建立主界面 (40)5.3.2 建立手动控制界面 (41)5.3.3 动作过程 (42)第六章 S7-300与WINCC通讯 (43)总结 (46)参考文献 (47)英文翻译原文 (48)英文翻译译文 (60)致谢 (69)附录 (70)第一章绪论1.1 设计背景机械手是在自动化生产过程中使用的一种具有抓取和移动工件功能的自动化装置,它是在机械化、自动化生产过程中发展起来的一种新型装置。
机械手的组成机械手是一种能够模拟人类手臂运动的机械装置,由多个组成部件构成。
这些组成部件相互协作,使机械手能够完成各种复杂的任务。
下面我们来详细介绍一下机械手的组成。
1. 机械手臂:机械手臂是机械手的核心部件,通常由多个关节连接而成。
每个关节都可以实现转动或者伸缩,从而使机械手臂能够在三维空间内完成各种运动。
机械手臂的长度和关节数量可以根据具体需求进行设计和调整,以适应不同的工作环境和任务。
2. 末端执行器:末端执行器是机械手的“手指”,用于具体操作物体。
常见的末端执行器有夹爪、吸盘、钳子等。
不同的末端执行器适用于不同的任务,例如夹爪适用于抓取物体,吸盘适用于吸附物体等。
3. 控制系统:控制系统是机械手的大脑,用于控制机械手的运动和执行任务。
控制系统通常由计算机、控制器和传感器等组成。
计算机负责处理和分析任务相关的数据,控制器负责发送指令控制机械手的运动,传感器负责感知周围环境和物体的位置、力量等信息,以便机械手能够做出准确的动作。
4. 传动系统:传动系统用于传递控制信号和能量,使机械手的各个部件能够协调运动。
传动系统通常由电机、减速器、传动带、链条等组成。
电机提供动力,减速器用于减小电机转速并增加扭矩,传动带和链条用于传递动力和运动。
5. 传感器:传感器是机械手感知和获取外界信息的重要组成部分。
常见的传感器包括光电传感器、力传感器、视觉传感器等。
光电传感器可以用于检测物体的存在和位置,力传感器可以用于测量机械手对物体施加的力量,视觉传感器可以用于识别物体和环境。
6. 控制算法:控制算法是机械手实现精确运动和执行任务的关键。
控制算法可以根据具体任务和环境进行设计和优化,以实现机械手的高效运动和准确操作。
以上是机械手的主要组成部分。
机械手的应用非常广泛,可以用于工业生产、医疗手术、物流仓储等领域。
随着科技的不断进步和创新,机械手的功能和性能也在不断提升,为人类带来了更多的便利和效益。
相信在未来,机械手将会发展成为更加智能和灵活的机器人助手,为人类创造更多的价值。
基于自动化的采摘机器人随着科技的快速发展,自动化技术已经深入到各个领域,其中农业领域也不例外。
近年来,基于自动化的采摘机器人已经逐渐成为农业领域的研究热点。
这种机器人的出现,不仅可以提高采摘效率,降低人工成本,还可以解决劳动力短缺和人力成本上升的问题。
一、自动化采摘机器人的研究现状目前,自动化采摘机器人的研究主要集中在视觉识别和机械臂抓取两个环节。
在视觉识别方面,通过深度学习和计算机视觉技术,机器人可以识别并跟踪目标植物,确定最佳的采摘位置和时间。
在机械臂抓取方面,机器人通过高精度的传感器和算法,可以模拟人类的手部运动,准确地抓住目标植物,并完成采摘。
二、自动化采摘机器人的应用场景自动化采摘机器人可以应用于各种需要大量人力的农业领域,如水果、蔬菜、鲜花等。
以水果采摘为例,机器人可以识别出成熟的水果,并准确地抓住它们,大大提高了采摘效率。
此外,机器人还可以在危险的环境下工作,如高压电线附近或农药残留严重的区域,降低了人类的工作风险。
三、自动化采摘机器人的挑战与前景虽然自动化采摘机器人的研究已经取得了一定的进展,但是在实际应用中仍然存在一些挑战。
例如,机器人的视觉识别系统还需要进一步提高精度和稳定性,以适应各种复杂的环境。
此外,机器人的机械臂也需要进一步提高抓取的准确性和力度控制,以适应不同大小和形状的水果。
然而,自动化采摘机器人的前景非常广阔。
随着技术的不断进步和应用场景的不断扩展,机器人将在农业领域发挥越来越重要的作用。
未来,我们可以期待看到更多的自动化采摘机器人在农田、果园、温室等地方工作,为农业生产带来更多的便利和效益。
四、结论基于自动化的采摘机器人是农业领域的一种创新技术,具有广泛的应用前景和重要的实际意义。
通过深度学习和计算机视觉技术,机器人可以识别并跟踪目标植物,通过高精度的传感器和算法,可以模拟人类的手部运动,准确地抓住目标植物,并完成采摘。
这种机器人的出现,不仅可以提高采摘效率,降低人工成本,还可以解决劳动力短缺和人力成本上升的问题。
机械手臂的控制系统机械手臂是一种能够代替人类完成一系列工作的机器人。
在现代工业中,机械手臂被广泛应用于生产线上的物料处理、组装、焊接等工作。
它们可以精确地执行任务,而且速度比人类快得多。
然而,机械手臂的高效运作还依赖于其控制系统的精度和稳定性。
在这篇文章中,我将介绍机械手臂的控制系统以及它们的基本原理。
1. 机械手臂的结构机械手臂由几个基本组件组成。
最常见的机械手臂本体是由若干的关节组成的,每个关节由电动机、减速器和连接杆组成,可以沿着不同的轴线运动。
因此,机械手臂可以绕其本身的轴线旋转、向上、向下、向左、向右和向前、向后移动。
此外,机械手臂还有各种末端执行器,如夹具、钳子、气动爪子等。
2. 自动控制系统是机械手臂的关键组成部分。
自动控制系统通常由四个部分构成:传感器、微处理器、执行器和控制算法。
传感器用于感知机械手位置、速度和姿态等参数。
这些感知器可以是位置传感器、速度传感器或加速度计等。
这些传感器收集的信息通过微处理器处理,以确定下一个位置和动作。
执行器是控制系统中另一个重要的组成部分,它们用来控制机械手臂的运动。
执行器可以是电动机、气动元件、液压元件和电磁阀等。
控制算法是用于计算执行器行动的向量和平衡动作的方案。
控制算法包括了许多的模式识别的技术,例如 PID 算法和局部响应神经网络等。
3. 机械手臂的控制模式机械手臂的控制模式分为两种:开环控制和闭环控制。
开环控制是指远程指令控制的机动模式。
在这种模式下,执行器接收来自远程控制器的指令,并执行相应的动作。
这种模式下机械手臂的运动是较为单一的,只能进行预编排的基本操作。
闭环控制是指机械手臂较为复杂的控制模式。
在这种模式下,机械手臂会使用感测器来不断的检查其位置、速度和姿态等参数,并将这些信息输入到微处理器中,微处理器再运用不同的控制方法计算下一个动作。
这种模式下机械手臂能够完成较为复杂的任务和变化的操作等。
4. 机械手臂的控制方法机械手臂的控制方法有很多种,每种控制方法都有其优势和劣势。
机械手臂原理分析
机械手臂是一种用于模拟人类手臂运动的机械设备,具有一定的自主性和灵活性。
它由机械臂体、关节、电机和控制器等部件组成。
机械手臂具有多个关节,通常为旋转关节或直线关节,用于提供不同方向和幅度的运动。
这些关节通过电机驱动,通过控制器控制电机的运动以实现手臂的运动。
机械手臂的运动灵活性主要来自于其关节的设计和控制系统的优化。
通过调整关节的角度和速度,机械手臂可以执行不同的任务和动作,如抓取、举起、放置等。
机械手臂通常配备有传感器,如力传感器和视觉传感器,用于感知和反馈环境信息。
力传感器可以检测手臂施加的力和压力,以保证安全性和精确性。
视觉传感器可以获取目标物体的位置和形状信息,从而帮助机械手臂进行准确定位和抓取。
机械手臂的控制系统是实现手臂自主运动和精确控制的核心。
控制系统通常由计算机和软件组成,通过编程确定手臂的运动轨迹和动作序列。
控制系统可以实现手动控制、自动化控制和学习能力,提高机械手臂的操作效率和适应能力。
总之,机械手臂的原理分析包括机械结构、关节和电机驱动、控制系统等方面。
这些部件共同协作,使机械手臂能够模拟人类手臂的运动,实现各种精确的操作任务。
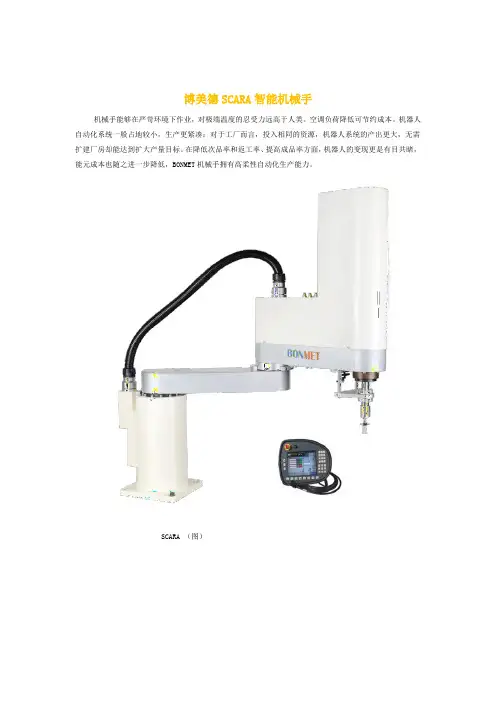
博美德SCARA智能机械手机械手能够在严苛环境下作业,对极端温度的忍受力远高于人类。
空调负荷降低可节约成本。
机器人自动化系统一般占地较小,生产更紧凑;对于工厂而言,投入相同的资源,机器人系统的产出更大,无需扩建厂房却能达到扩大产量目标。
在降低次品率和返工率、提高成品率方面,机器人的变现更是有目共睹,能元成本也随之进一步降低,BONMET机械手拥有高柔性自动化生产能力。
SCARA (图)SCARA 产品简介博美德数控高速智能SCARA 机械手是实现高精度、快速拾放料作业的机器人解决方案,具有体积小巧,速度快、安装空间小等特点。
广泛用于电子零部件组装、搬运、上下料、涂胶、点焊等行业。
通过CANopen 或EtherCAT 总线实现数据通讯,集成EUROMAP ,完成多轴联动插补。
博美德SCARA 机械手拥有无可媲美的灵活性、通用性、性价比以及速度、精度的高度稳定性;可实现多种复杂运动;可配置多台机械手同时相互协调工作。
行业应用电子 食品 生物制药 医疗器械 计算机 航空航天 日用品 LCD/LED 汽车半导体典型应用物料搬运部件组装 涂胶 上下料 视觉检验 点焊 计量分配 传送带跟踪 切断装置 医疗试验参数图示动作范围图纸:安装部详细图纸:参数图示动作范围:安装部详细:※所需行程超出以上范围时,请于本公司联系。
※循环时间及Z轴的工作范围规格不同,请于本公司联系。
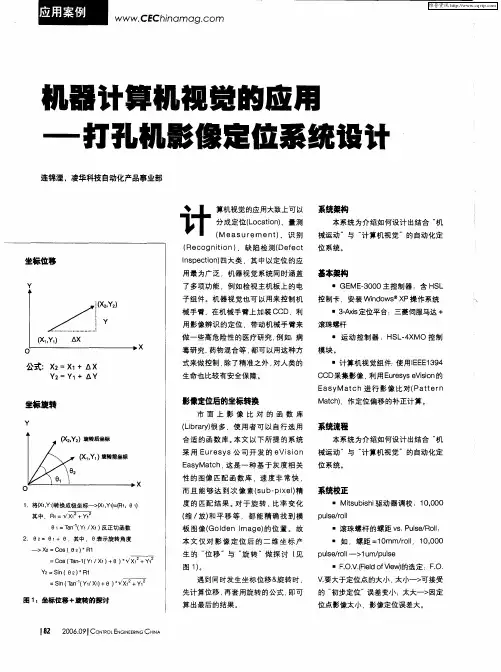
博美德SCARA机械手产品设计从多方面考虑并满足了追加用途环境设计博美德SCARA机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。
另一个关节是移动关节,用于完成末端件在垂直于平面的运动。
手腕参考点的位置是由两旋转关节的角位移φ1和φ2,及移动关节的位移z决定的,即p=f(φ1,φ2,z),如图所示。
这类机器人的结构轻便、响应快,例如Adept1型SCARA机器人运动速度可达10m/s,比一般关节式机器人快数倍。
它最适用于平面定位,垂直方向进行装配的作业。
机械手臂分割原理的应用1. 介绍机械手臂(Robotic Arm)作为一种重要的自动化设备,广泛应用于工业生产、医疗服务、物流等领域。
机械手臂的分割原理是指通过对目标物体进行识别和分割,从而实现对物体的精确抓取和处理。
机械手臂分割原理的应用可以大大提高生产效率、减少人力成本,并且具有智能化和灵活性的优势。
本文将重点介绍机械手臂分割原理的应用。
2. 分割原理机械手臂的分割原理是通过计算机视觉技术来实现的。
其主要步骤包括图像采集、预处理、目标识别和分割、运动规划和执行等。
2.1 图像采集图像采集是机械手臂分割的第一步,通过摄像头等设备将目标物体的图像输入到计算机系统中。
2.2 预处理预处理是对图像进行预处理,包括去噪、增强对比度和图像滤波等操作,以提高图像质量和目标识别的准确性。
2.3 目标识别和分割目标识别和分割是机械手臂分割的核心步骤。
在这一步骤中,计算机系统通过图像处理和机器学习算法来识别和分割目标物体。
常用的方法包括模板匹配、边缘检测、颜色分布分割等。
2.4 运动规划和执行运动规划和执行是机械手臂分割的最后一步。
在这一步骤中,系统根据目标物体的位置和特征信息,通过运动规划算法来确定机械手臂的运动轨迹,然后执行抓取和处理动作。
3. 应用领域机械手臂分割原理的应用广泛存在于各个领域。
3.1 工业生产在工业生产中,机械手臂分割原理的应用可以大大提高生产线的效率和质量。
例如,在汽车制造工厂中,机械手臂可以根据分割原理准确抓取汽车零部件,并将其送到下一个工作站进行组装。
这样不仅可以减少人力成本,还可以避免由于人为操作引起的误差。
3.2 医疗服务机械手臂分割原理的应用也在医疗服务领域得到了广泛的应用。
例如,在手术中,机械手臂可以根据分割原理识别和分离患者的器官,从而提高手术的精确性和减少手术时间。
3.3 物流在物流领域,机械手臂分割原理的应用可以大大提高仓储和分拣的效率。
例如,在快递仓库中,机械手臂可以根据分割原理识别和分割包裹,并将其放置到相应的区域中。
手术机器人原理
手术机器人原理是指通过利用先进的技术和装置,使机器人能够实现在手术操作中扮演重要的角色。
它通常由多个组件组成,包括控制系统、机械臂、感应器和视觉系统等。
手术机器人的控制系统是其关键组成部分之一。
它通常由一台强大而灵敏的计算机系统组成,该系统能够接收和处理来自医生的操作指令,并将其转化为机器人臂的运动。
控制系统还可以通过软件和算法来使机器人具备智能化的特性,能够根据手术过程中的需要做出相应的调整。
机械臂是手术机器人的主要执行组件,它的设计灵感来自于人类的手臂。
通常,机械臂由多个可活动的关节组成,使其能够模拟人手的运动。
这些关节由电动机驱动,可以实现高度准确和平滑的运动,使机器人能够在手术操作中完成各种复杂的动作。
感应器是手术机器人的另一个重要组成部分,它可以通过传感器来获取关于手术环境的信息。
这些传感器可以检测到组织的弹性、温度、压力等参数,并将这些信息传输给控制系统。
通过感应器,机器人可以实时了解手术区域的情况,从而更好地进行操作。
视觉系统是手术机器人中不可或缺的组件之一。
它通常由高分辨率的摄像头、显示器和图像处理软件组成。
视觉系统能够为医生提供清晰、逼真的手术区域图像,帮助医生更好地判断和操作。
同时,视觉系统还能够通过图像处理技术来提取有用的
信息,如组织的形状、深度和血液供应情况等。
总之,手术机器人通过其先进的控制系统、灵活的机械臂、精确的感应器和高清晰的视觉系统等组件,使其能够在手术操作中发挥重要的作用。
它可以提供更精确、稳定和安全的手术过程,从而为患者带来更好的治疗效果。
机械手臂的编程技术在现代工业中,机械手臂已成为生产线上不可或缺的一部分。
机械手臂可以执行各种各样的工作,从简单的装配零件,到复杂的拆卸产品。
现在许多企业都已经开始使用机械手臂,这也加速了机械手臂的发展和创新。
机械手臂的编程技术是机械手臂操作的核心,下面我们来探讨一下机械手臂的编程技术。
编程语言机械手臂编程语言是一种专门为机器人设计和开发的高级编程语言。
有几种不同的编程语言可以用于编写机械手臂程序。
现在最常用的机械手臂编程语言是机器人操作系统(ROS)。
ROS是一种灵活的,高度模块化的操作系统,它提供了一个安全的环境,可用于编写和运行机械手臂程序。
ROS不仅在工业领域有广泛应用,也在家庭机器人和军事应用中使用。
另外一种广泛使用的机械手臂编程语言是较早的机器人语言(RL)。
RL可以使用类似PASCAL或C++的结构化编程方式来编写。
但是,与ROS相比,RL的灵活性和可扩展性较差。
机械手臂编程语言的选择将使机械手臂编程任务更加简单和高效。
编程基础机械手臂编程的基础是编程语言的理解和掌握。
一般来说,编程的第一个步骤是定义机械手臂的工作空间。
这需要使用绘图工具或CAD软件来建立机械手臂的模型。
接着, 将机械手臂与计算机连接,使用ROS等编程软件,开始编写机械手臂程序。
编程需要在指定的空间范围内进行,编写程序的过程就是在这个范围内指定机械手臂的动作和位置。
机械手臂程序的编写过程通常会包括以下几个方面:1. 逆向运动学模型建立2. 坐标系选择和设定3. 动作控制和路径规划设置4. 错误诊断和改进机械手臂编程的完成需要经过多次测试和改进,才能达到设想的效果。
同时还要清晰了解机械臂的结构和机械臂的物理特性,通过这些来调整机械臂的工作效率和程序的稳定性。
机械手臂编程的复杂性需要专业人员进行管理和开发。
专业的机械手臂工程师因此具有非常高的市场价值。
一些技术机械手臂具有独特的程序设计要求,这就需要在技术方面有一些创新。
工业机器视觉系统的构成和原理工业机器视觉系统是一种利用计算机图像处理技术,通过硬件设备采集、处理、分析物体的视觉信息,并控制相应机械臂或其他设备进行智能化操作的系统。
它的应用范围非常广泛,涉及到制造业、医疗、交通等领域。
那么,工业机器视觉系统究竟由哪些部分构成,它的原理是什么呢?下面我们就来一一探讨。
一、工业机器视觉系统的基本构成1、传感器工业机器视觉系统必不可少的部分就是传感器。
它负责采集物体的图像信息,能够对环境、物体等一系列参数进行测量和控制。
常见的传感器有光学传感器、线性传感器和特定用途传感器等。
2、镜头镜头是传感器不可或缺的兴趣组成部分。
它可以将物体图像反射到传感器上,同时也影响到成像质量。
镜头的品质直接影响到成像效果。
3、图像采集卡图像采集卡是工业机器视觉系统中的核心部分。
它能够实时、高速地将镜头采集到的图像信号转换成计算机可处理的数字信号。
同时,它还负责将信号发送到计算机进行进一步分析处理。
4、计算机工业机器视觉系统中的计算机通常是一台高性能的工控机,因为对计算机的计算速度和精度要求非常高。
计算机负责采集、处理、分析和输出图像信息,将处理后的结果反馈给机器人或其他设备进行控制,形成闭环反馈系统。
5、软件系统软件系统是工业机器视觉系统最为关键的一部分。
它运行在计算机上,负责图像处理、分析、识别等关键任务。
软件能够根据不同的应用场景和需求进行定制,实现精确定位、测量、品质检测、分类、识别等功能。
二、工业机器视觉系统的工作原理1、图像采集当光线通过镜头进入传感器时,传感器就开始将图像转换成数字信号并将其发送给计算机。
由于采集精度和速度都非常高,因此图像的获取和采集非常迅速。
2、图像处理采集到的图像需要在计算机上进行处理以达到机器视觉的需求。
图像处理可以包括图像滤波、图像增强、几何校正和标准化、灰度阈值分割、边缘检测等过程。
这些处理能够去除噪声、纠正形状和尺寸等因素,使得采集到的图像更加完美。
机械臂工作原理机械臂是一种能够模拟人类手臂运动的机械装置,它具有多关节和执行器,可以完成各种复杂的工业操作。
机械臂的工作原理涉及到多个方面的知识,包括传感器、控制系统、执行器等。
下面将从这些方面逐一介绍机械臂的工作原理。
首先,机械臂的传感器起着至关重要的作用。
传感器可以感知外部环境的信息,比如位置、力度、速度等。
这些信息对于机械臂的运动控制至关重要,传感器可以将感知到的信息传输给控制系统,从而实现对机械臂的精准控制。
常见的机械臂传感器包括位置传感器、力传感器、视觉传感器等,它们能够实时监测机械臂的运动状态,为控制系统提供准确的反馈信息。
其次,控制系统是机械臂工作原理中的核心部分。
控制系统可以根据传感器反馈的信息,对机械臂的运动轨迹、速度、力度等进行精准控制。
控制系统通常由计算机和控制算法组成,计算机可以根据预先设定的任务要求,通过控制算法生成相应的控制指令,从而驱动执行器实现对机械臂的控制。
控制系统的稳定性和精准度直接影响着机械臂的工作效率和精度。
最后,执行器是机械臂工作原理中的另一个关键部分。
执行器负责将控制系统生成的指令转化为实际的机械臂运动。
常见的执行器包括电机、液压缸、气动缸等。
电机是最常用的执行器,它可以通过控制电流大小和方向来实现对机械臂的精准控制,而液压缸和气动缸则适用于需要大力度操作的场合。
执行器的性能直接影响着机械臂的运动速度和力度,因此在选择和设计执行器时需要充分考虑实际应用需求。
总的来说,机械臂的工作原理涉及到传感器、控制系统和执行器三个方面,它们共同协作实现对机械臂的精准控制。
传感器负责感知外部环境的信息,控制系统负责生成控制指令,执行器负责将指令转化为实际的运动。
只有这三者协作无间,机械臂才能够高效、精准地完成各种工业操作。
随着科技的不断发展,机械臂的工作原理也在不断完善和创新,相信在不久的将来,机械臂将会在更多领域展现出其强大的应用价值。
机器人物体抓取的说明书一、引言机器人物体抓取是近年来人工智能技术发展的重要领域之一。
本说明书旨在介绍一种机器人物体抓取的技术和方法,以帮助用户更好地理解和使用该技术。
二、技术原理机器人物体抓取技术主要基于计算机视觉和机械臂控制两大关键技术。
其中,计算机视觉技术包括物体检测、定位和识别等过程,通过相机感知目标物体的信息;机械臂控制技术则负责将机器人的机械手臂精确地移动到目标物体位置并进行抓取动作。
三、所需材料和设备1. 机器人设备:包括机械臂、视觉系统、控制器等。
2. 目标物体:即欲进行抓取的物体,可以是各种形状、大小和材质的物体。
四、步骤说明1. 准备工作:将机器人设备正常运行并连接至控制器,确保相机视觉系统能够正常工作。
2. 目标物体检测:机器人通过相机视觉系统对目标物体进行检测,获得物体的位置和姿态信息。
3. 抓取规划:根据目标物体的位置和姿态信息,机器人进行抓取规划,确定合适的抓取策略。
4. 抓取执行:机器人控制机械臂移动到目标物体位置,并执行抓取操作。
5. 抓取状态检测:机器人通过视觉系统或力传感器等设备,检测抓取状态,确保物体已被牢固抓取。
6. 物体提取或放置:机器人将抓取成功的物体提取到指定位置,或根据要求将物体放置到其他位置。
五、注意事项1. 确保机器人设备和相机视觉系统正常工作,检查连接是否稳固可靠。
2. 目标物体需摆放在机器人能够观测到的范围内,并保持一定的可见度。
3. 抓取规划和执行过程中需注意克服物体的姿态变化、形状复杂性和材质特性等挑战。
4. 定期检查机械臂的运动性能和精度,保持机器人设备的正常运行状态。
六、总结机器人物体抓取技术在工业生产、仓储管理和物流运输等领域具有广阔的应用前景。
通过本说明书的介绍,相信用户对机器人物体抓取的原理和步骤有了更加清晰的认识,并能够运用该技术解决相关问题。
祝愿大家能够在实践中取得优异的成果!以上为机器人物体抓取的说明书,希望对您有所帮助。
机械臂的工具坐标系标定1.引言1.1 概述概述机械臂是一种能够模拟人类手臂运动的复杂机电一体化设备,广泛应用于工业自动化领域。
在机械臂的操作过程中,为了获得准确的姿态信息和执行精确的任务,工具坐标系的标定是至关重要的环节。
工具坐标系是指机械臂末端执行器(如夹爪、焊枪等)相对于机械臂末端关节坐标系的姿态和位置表示。
由于机械臂的运动和操作过程中,末端执行器可能会存在不可避免的误差和不确定性,因此需要通过工具坐标系的标定来准确描述末端执行器在空间中的位置和方向。
工具坐标系标定的基本原理是通过测量一系列已知位置和方向的目标点,利用数学模型和算法来确定机械臂末端执行器的坐标系。
标定的过程需要使用专门的标定设备和工具,利用机械臂的运动学和逆运动学计算方法来进行数据处理和分析。
工具坐标系标定对于机械臂的精度和准确性具有重要影响。
正确标定后的工具坐标系可以帮助机械臂实现更精确的定位和姿态控制,提高工作效率和质量。
同时,标定过程还可以为机械臂的故障诊断和维护提供可靠的依据。
本文将详细介绍机械臂工具坐标系的概念和意义,分析工具坐标系标定的原理和方法,并总结其对机械臂性能和应用的重要性。
另外,还将展望未来在工具坐标系标定方面的研究方向,以促进机械臂技术的进一步发展和应用。
1.2 文章结构文章结构部分的内容可以包括以下内容:文章结构部分的主要目的是介绍整篇长文的组织结构,向读者展示文章内部内容的布局和组成部分,以帮助读者更好地理解和阅读文章。
本文的结构分为引言、正文和结论三个主要部分。
引言部分包括概述、文章结构和目的三个小节。
在概述中,将简要介绍机械臂的工具坐标系标定的背景和重要性。
文章结构部分将详细介绍文章的组成部分和布局,包括引言、正文和结论三个部分,并简要阐述每个部分的内容。
目的部分将明确说明本文的目的和意义,即为读者提供关于机械臂的工具坐标系标定的相关知识和方法,以及该领域未来的研究方向。
正文部分将分为2.1节和2.2节。
机械手臂与计算机视觉检测系统摘要本论文目的在建立机械视觉系统、输送系统、机械手臂与网络联机监控系统之自动化检测整合系统。
目前工业用之机械手臂都具有教导器之教导功能,并依其在线之需求教导运动路径做夹取、移动等动作,其教导控制器祇能储存一组运动路径。
本文将对五轴机械手臂进行多组运动路径之教导,其各组之运动路径资料储存于计算机中。
以CCD影像系统对工件进行影像撷取,并判断工件良莠后,利用自行开发软件,把机械手臂所需运动路径数据传送至机械手臂控制器,而将工件夹取至指定位置。
本文开发之软件系统可与其他自动化机械进行网络联机图形监控,对于网络式弹性制造系统之建立有莫大帮助。
关键词:机械手臂、影像系统、图形监控、弹性制造系统一、绪论传统上生产自动化即是“机电整合”,但近年来生产已转为少量多样的型态,生产线需有很大的变动性方能符合需求,其中自动检测部分,更是在多变生产线中维持一定产品质量最关键的技术。
故现在的生产自动化,应是计算机视觉检测配合机电整合,即“光机电整合”方能符合需求[1]。
Mantas 是美国人Carey 于1870 年所提出的,它利用一组光电管而发展出第一部视网膜扫描仪[2]。
在1969 年由美国的贝尔实验室(Bell Lab)开发出CCD 电荷藕合组件,使得视觉影像的世界被广泛的应用在科学及一般生活。
一般人而言常会将图像处理系统,误认为就是计算机视觉系统;实际上计算机视觉系统与图像处理系统极为相似,但计算机视觉系统比较着重于对影像立体信息的研究与处理,就像当计算机透过CCD 撷取影像后,进行影像前级处理,也就是将影像二值化及强化后使影像清晰,使背景和前景可明显的区分后,在透过程序比对判断后由计算机下达命令,透过驱动器来趋动五轴机械手臂而完成一连串的动作,本文就是利用此一原理来达到自动化检测的目的。
当然计算机视觉系统的作动技术,有赖于软件所提拱的检索功能及函式库多寡而决定其系统的优劣,本文是采用Matrox Imaging Library (MIL)来做影像的处理及分析的动作。
机器人、机器手臂在1962 年美国UNIMA-TION 公司就已发展出来,直到1971 年计算机芯片的突破及微处理机的成功推出,才提拱机器人制造厂商一种便宜且智能的方式来做为控制的主体[3];日本在近几年来对于机器人的研究制造有相当大的进步,本文所采用的MITSUBISHI RV-M1 型机器手臂正是日本在近几年所开发的先进科技,本文将利用此机器手臂原理设计出可自动判断选择路径及建立多重选择路径的物流系统[4]。
本文目的乃是在建立一网络多路径自动检测视觉控制机械手臂之系统,在Windows98 环境下,进行自行开发之软件系统、图像处理系统及机械手臂控制系统软、硬件整合,使机械手臂能在网络计算机视讯监控下,利用机械视觉之功能,进行自动搜寻对象大小、位置及方向,计算机在判断对象良莠后选定路径,驱动机械手臂控制系统,将对象夹取至指定区域,完成自动检测之流程。
二、自动检测系统硬件架构本文所使用之硬件系统是由视觉系统、输送带系统、机械手臂等设备所组成,其硬件架构如图三所示1、本文硬设备如下:(1) Matrox公司生产的Meteor影像抓取卡,其为PCI接口。
(2)输送带系统:本文输送带设备为自制之皮带型输送带,其输送带1的长为100公分、宽20公分、高50公分,目的在将加工完成之工件送往检测区。
输送带2的长为70公分、宽20公分,高40公分其目的在将工件送往仓储区。
(3)PC设备一组,本文所采用的是AMD K6级个人计算机。
(4)PLC:本文使用永宏电机可程控器,其主要特性在于可直接于程序中控制RUN-ON及RUN-OFF,此特性有助于远程监控系统之设计。
(5)定位机械手臂:使用四口二位弹簧回位电磁阀控制作动,并使用自制定位爪将工件定位。
(6)100W 白炽灯泡及灯座二组。
2、通讯架构:本文设备之间的通讯流程图如图四所示,图四中的机械手臂驱动器是链接在PC 的COM2 埠,而PLC 则是连结到PC 的COM1 埠,而CCD 则是经由影像撷取卡链接到PC 上。
由图中我们可以清楚的看到驱动器可透过教导器来直接控制机械手臂,也可以由PC 端利用程序撰写透过驱动器来控制机械手臂,此举的作用乃是在达到远程监控的目的。
3、五轴机器手臂架构:目前在工业界的机械人或机械手臂大都拥有类似人类特性的可程序化控制机器。
一般而言组成机器手臂皆具备两大主体,分别是机械结构与控制系统[5]。
而在机械结构方面区分为五种基本架构水平关节式结构、关节手臂式结构、极座标式结构、圆柱式结构、直角坐标式结构等五种结构。
对于机器手臂的控制系统方面可分非伺服(Non servo)、伺服(Servo)、智能机器手臂(Intelligent Robot)等。
本文在机械结构方面的要求需具备多路径、空间定位点多、坐标定义有弹性之功能,因此需采用关节手臂式结构。
而在控制系统方面的需求是可进行回馈性的连续控制,且机器手臂内部需有速度、位置、力矩等感测组件,所以本文采用的是日本三菱公司所生产的RV-M1 机器手臂,其整体架构主要为教导盒( Teaching box )、驱动器(Driver )、手臂本体( Robot )、直流马达夹爪( DC motor hand )组合而成[6]。
RV-M1 机械手臂有五个自由度的关节,可搬重量为1.2kgw 而本文因夹取工件的重量是0.6kgw,所以使用的是直流电动马达夹爪,RV-M1 机械手臂在空间的定位精度可达到正负0.1mm,其可经由教导器教导机械手臂至我们所欲作动的位置,然后经由提拱电源及讯号的驱动器记忆用户欲至之座标,然后我们必须藉由RS-232C 串行传输线与我们的计算机PC 来做链接的动作[7],然后利用Windows 98 中的"终端机"软件的通讯功能对机械手臂的驱动器来读取坐标,或者执行控制程序;本文是在利用RS 232C 传输线与驱动器做链接后,以Visual Basic 6.0 软件编辑作动程序,然后空间坐标放入程序中,然后再以字符串的方式将程序送回驱动器,如此一来即可控制机械手臂如图3 所示。
三、计算机影像原理本CCD 它是电荷耦合组件(Charge Coupled Device)的缩写,是目前以固态(solid state)影像组件的方式应用在摄影机最尖端的科技。
一般常见的CCD 摄影机是属于非接触式的平面取像装置,有黑白与彩色之分,其原理就是利一换能器(Transducer)装置,将某一种形式的能量或物理量(Physical Quanitiy)转换成另一种形式能量的装置,而CCD 就是将光能转换成连续电压讯号的换能器,如图一所示。
图、一CCD 能量转换本文在影像撷取后的处理部份,是利用Meteor影像抓取卡将影像撷取至计算机中,然后交由程序软件作形态的改变、比对、量测、颜色办认、颗粒分析等等影像处理动作。
以下我们将讨论影像从撷取后的一连串处理:(1)、影像之前级处理由CCD 所撷取下来的数字影像中,由于对象的边缘容易产生模糊现象,以致于无法分隔出影像中的物体和背景,因此需要使用对比强化处理来加强输入影像之边缘以及提高对象与背景间的对比度,因此本文所采用的方法是将影像滤波,它的原理是将像素(Pixel)来作一些数学运算。
取一特定屏蔽(mask)对原始的影像来作回旋处理,以得到所需的影像特征,其运算流程如图二所示:图、二影像数据运算流程2 ∑ N x y 本文是利用低通滤波( Lowpass )运算来将欲测对象加以边缘强化。
在这个 地方有一点要注意的是,假设欲测对象的灰度值与背景相同,则此时就不能只 有做上述的动作,而必须做影像区分的动作,它的目的在于将影像中的对象和 背景分离出来,基本上最常用的方法就是将影像二值化处理,也就是变成黑白 影像,通常对象是黑色,而背景则是白色的,一般二值化法有五种,分别为平 均灰阶值,Moment preserving threshold ,Maximizing the Discriminate Measure , 修正式迭代法及OTSU 二值法,本文是采用OTSU 二值化法[8]作为影像的前级 处理法因其可得到较佳的临界值。
以下为OTSU 二值化法之公式(1-1)及(1-2)∑ ∑ e (x, y )× f (x, y ) x y T 0 =∑∑ e (x, y ) x y (1-1)wheree (x, y ) =f (x + 1) − f (x, y ) + f (x, y + 1) − f (x, y )(1-2)由于二值化的影像中仍有不少噪声存在,所以此时我们必运用形态学中的 六个基本运算,收缩(Erosion)、膨胀(Dilation)、断开(Open)、闭合(Close)、断 开闭合(Open-Close)、及闭合断开(Close-Open)等方式来加以处理噪声的问题。
打光的技巧,在基本的打光方式有三种分别是正向打光(Front Lighting)、 背向打光(Back Lighting)及结构性打光(Structured Lighting)。
本文所用的打光技 巧即是其中的正向打光,其所指的是照明装置与CCD 摄影机同在待测物或工件 的前方,此种打光方向最常使用在欲撷取待测物的特征上,这种打光方式具有 很好的照明效果,而其最佳状态是必须使用翻拍灯座即双灯座两边隔180度同 时打光,且使用及高功率的电灯泡,这样光源才会充足且无阴影存在[9]。
(2)、影像比对分析 在影像比对分析中在将影像做完二值化处理后的影像进行对象的侦测与办认,其中侦测的目的在于判断对象的存在与否,而办认则为确定对象的种 类。
基本上侦测功能可分为单点(或称孤立点)侦测、线段侦测、边迹侦测, 而办认功能则是可对颗粒物、夹角、数字、中文字作办识,本文的工件是圆柱 对象因此采用 Thomas 的最小面积误差对圆心及半径作量测[10],其公式如下 (2-1)所示:J = e = [R 2 − {(x − x )2 + ( y − y )2}](2-1) 2 ∑ i i π i =1利用最小平方误差法将 J 最小化,分别对三个变量 R,x, y 各别进行偏微分且设 定其微分值为 0,如此一来即可以将联立方程式解出得 R 值为(2-2): R = 1 { Nx 2 −2∑ x + N x 2 + ∑ y 2 −2∑ y + N y 2}(2-2) 在计算出 R 值后即可知式中 N 为坐标点数进而得知对象的所在坐标及其旋转角度,进而判别该影像是否与标形数据库中的欲比对影像具有相同的特征。
四、系统架构流程系统工作流程如图五所示,而整体工作现场如图六所示。