自写-六旋翼无人机发明实用新型专利撰写范例汇总
- 格式:doc
- 大小:110.50 KB
- 文档页数:6
![一种可折叠六旋翼飞行器[实用新型专利]](https://uimg.taocdn.com/8b343e9cf46527d3250ce0c7.webp)
专利名称:一种可折叠六旋翼飞行器
专利类型:实用新型专利
发明人:李杰,申强,徐兴建,杨成伟,王征,刘云辉,叶波波,孙煜杰,熊婧,杨亚超
申请号:CN201620030215.2
申请日:20160113
公开号:CN205469799U
公开日:
20160817
专利内容由知识产权出版社提供
摘要:本实用新型属于一种无人飞行器,特别涉及一种微小型旋翼飞行器。
其技术方案是:一种可折叠六旋翼飞行器,包括:两个Y型动力模块(1),两个I型单支臂(3)和飞行器机身(5);所述Y型动力模块(1)通过Y型折叠组件(2)、所述I型单支臂(3)通过单支臂折叠组件(4)连接至所述飞行器机身(5);本实用新型折叠后体积较展开时减小54%,有效地解决了多轴多旋翼飞行器不便于携带运输的问题,并且结构简单,选用成型材料,可有效降低飞行器自身成本。
申请人:北京理工大学
地址:100081 北京市海淀区中关村南大街5号
国籍:CN
代理机构:北京理工大学专利中心
更多信息请下载全文后查看。

说明书摘要本实用新型公开一种六旋翼飞行系统,包括控制器和飞行器,所述控制器包括微处理器及分别与微处理器电连接的位置锁定装置、航姿测量装置、油门和航向以及高度调节装置,所述飞行器包括处理器、无刷电机及分别与处理器电连接的定高装置和电机调速装置,所述飞行器的无刷电机与电机调速装置电连接,所述控制器和飞行器上设有相互电连接的无线通信装置,所述控制器的无线通信装置与微处理器电连接,所述飞行器的无线通信装置与处理器电连接。
本实用新型通过控制器和飞行器的相互配合工作,在一定程度上提高了六旋翼飞行系统的运行效率,为其它更多功能的拓展提供了基础。
相比其它的飞行系统,此系统结构更简单,更容易实现,降低了普通用户对飞行器的控制难度。
图1权利要求书1.一种六旋翼飞行系统,包括控制器和飞行器,所述控制器包括微处理器及分别与微处理器电连接的位置锁定装置、航姿测量装置、油门和航向以及高度调节装置,所述飞行器包括处理器、无刷电机及分别与处理器电连接的定高装置和电机调速装置,其特征在于,所述控制器和飞行器上设有相互电连接的无线通信装置,所述控制器的无线通信装置与微处理器电连接,所述飞行器的无线通信装置与处理器电连接,所述飞行器的无刷电机与电机调速装置电连接。
2.根据权利要求1所述的一种六旋翼飞行系统,其特征在于,所述位置锁定装置包括陀螺仪、加速度计和全球卫星定位系统(GPS)电路模块。
3.根据权利要求1所述的一种六旋翼飞行系统,其特征在于,所述航姿测量装置包括陀螺仪、加速度计、电子磁场计和温度传感器。
4.根据权利要求1所述的一种六旋翼飞行系统,其特征在于,所述航姿测量装置为三轴加速度陀螺仪传感器。
5.根据权利要求1所述的一种六旋翼飞行系统,其特征在于,所述定高装置包括超声波传感器和气压计传感器。
说明书一种六旋翼飞行系统技术领域本实用新型涉及飞行器控制技术领域,具体涉及一种六旋翼飞行系统。
背景技术在二十世纪初就出现的多旋翼飞行器拥有体积小、结构紧凑和可垂直起降的特点,被广泛应用于军事、警备和工农业生产等领域。

(19)中华人民共和国国家知识产权局
(12)外观设计专利
(10)授权公告号 (45)授权公告日 (21)申请号 201930195312.6
(22)申请日 2019.04.25
(73)专利权人 曜宇航空(深圳)科技有限公司
地址 518000 广东省深圳市南山区西丽街
道留仙大道1183号南山云谷创新产业
园3栋综合服务楼5楼511-521室
(72)设计人 杨立
(74)专利代理机构 深圳卓正专利代理事务所
(普通合伙) 44388
代理人 万正平
(51)LOC(12)Cl.
12-07
(54)使用外观设计的产品名称
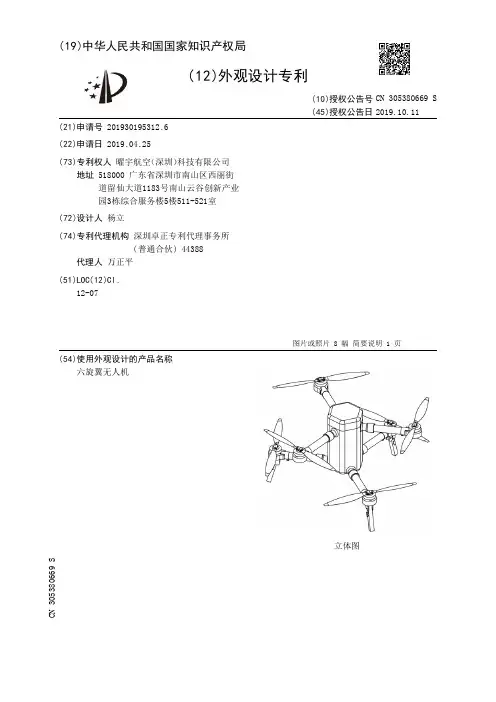
六旋翼无人机
立体图
图片或照片 8 幅 简要说明 1 页CN 305380669 S 2019.10.11
C N 305380669
S
主视图
后视图左视图右视图
俯视图
仰视图
立体图
折叠状态图
外观设计图片或照片1/1页
2 CN 305380669 S。
![一种全折叠结构六旋翼无人机[实用新型专利]](https://uimg.taocdn.com/129c72b6312b3169a551a431.webp)
专利名称:一种全折叠结构六旋翼无人机
专利类型:实用新型专利
发明人:曹庆旭,孔令超,庞振岳,赵学松,裴允嘉,李楠,佟亮申请号:CN201922165401.3
申请日:20191206
公开号:CN211139670U
公开日:
20200731
专利内容由知识产权出版社提供
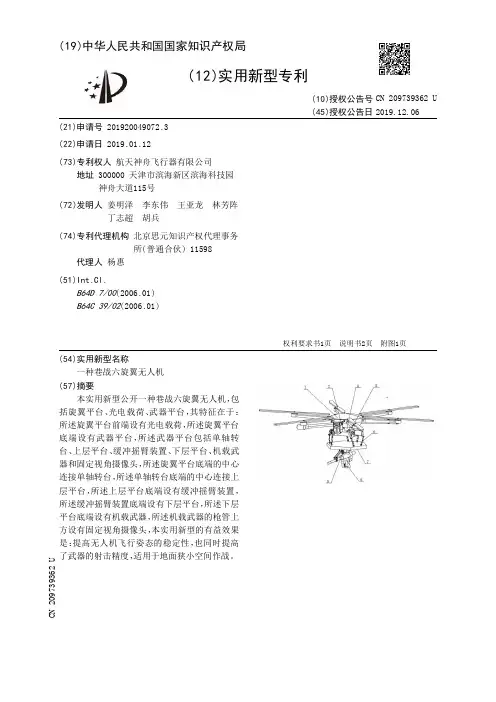
摘要:本实用新型提出了一种全折叠结构六旋翼无人机,包括机身、可折叠的起落架以及支撑电机的可折叠的悬臂系统。
所述可折叠的悬臂系统的第一悬臂可以彼此相对地进行折叠,所述可折叠的悬臂系统的第二悬臂可以两段式折叠。
所述可折叠的起落架的第一折叠支架和第二折叠支架可以彼此相对进行折叠。
本申请的全折叠结构六旋翼无人机中,悬臂系统的六个悬臂可以相对以及两段式折叠,同时起落架的两个折叠支架也可以彼此相对进行折叠,使得本申请的六旋翼无人机整体上可以获得更小的结构尺寸,因而可以大大降低无人机的体积,便于无人机的储运。
申请人:沈阳旋飞航空技术有限公司
地址:110035 辽宁省沈阳市皇姑区塔湾街40号
国籍:CN
代理机构:北京尚德技研知识产权代理事务所(普通合伙)
更多信息请下载全文后查看。
![一种具备地形自适应起降和行走功能的变体六旋翼无人机[发明专利]](https://uimg.taocdn.com/273443cf0722192e4436f609.webp)
专利名称:一种具备地形自适应起降和行走功能的变体六旋翼无人机
专利类型:发明专利
发明人:魏小辉,宋佳翼,彭一明,孙浩,尹乔之
申请号:CN202010792129.6
申请日:20200808
公开号:CN111661316A
公开日:
20200915
专利内容由知识产权出版社提供
摘要:本发明公开了一种具备地形自适应起降和行走功能的变体六旋翼无人机,涉及六旋翼无人机领域,能够在复杂地形下稳定起降落,且能在地面上移动。
本发明包括:安装平台、控制盒、旋翼、支臂。
沿安装平台的两侧边对称安装六个支臂,支臂具有三段两个关节,支臂上安装旋翼。
安装平台上控制盒连接并控制旋翼、支臂,并通过距离传感器、角度传感器回传数据自主智能调节飞行器落地姿态和坐标。
本发明的设计特点在于集成了机身和起落架,并具有智能自主降落控制系统,同时利用六足仿生结构设计,提高无人机着陆时复杂地形适应能力,以及额外的行走能力,拓宽无人机的应用前景。
申请人:南京航空航天大学
地址:210016 江苏省南京市秦淮区御道街29号
国籍:CN
代理机构:江苏圣典律师事务所
代理人:贺翔
更多信息请下载全文后查看。
![一种大载重的可折叠六旋翼无人机[实用新型专利]](https://uimg.taocdn.com/b1af242e77c66137ee06eff9aef8941ea76e4b2c.webp)
专利名称:一种大载重的可折叠六旋翼无人机专利类型:实用新型专利
发明人:张柏博,刘聪聪,罗勇冠
申请号:CN202220049235.X
申请日:20220110
公开号:CN216834262U
公开日:
20220628
专利内容由知识产权出版社提供
摘要:本实用新型提供一种大载重的可折叠六旋翼无人机,包括分别设置在无人机本体四角位置、两侧部的固定臂和折叠臂,折叠臂的一端通过两个相互平行的定位销与固定臂连接,折叠臂的另一端设置有叶轮机座,叶轮机座通过转轴与机翼连接。
无人机本体其中一端的两个折叠臂可左右旋转设置,该折叠臂的上方设置有所述机翼;其另一端的两个折叠臂可左右旋转设置,该折叠臂的下方设置有机翼;且两侧部的折叠臂可上下旋转设置,该折叠臂的下方设置有机翼。
本实用新型提供的大载重的可折叠六旋翼无人机,方便了大载重六旋翼无人机中的旋翼折叠过程,不仅具有较高的连接强度,同时折叠过程也方便快捷,便于携带。
申请人:烟台云都海鹰无人机应用技术有限公司
地址:264000 山东省烟台市高新区蓝海路1号E座704
国籍:CN
代理机构:山东明宇知信知识产权代理事务所(普通合伙)
代理人:陶一萌
更多信息请下载全文后查看。
无人机专利申请书模板尊敬的专利局:我司特此提交一项无人机相关技术的专利申请,敬请审查。
以下为专利申请书正文:一、技术领域本发明涉及无人机技术领域,具体为一种[无人机名称]及其控制系统。
二、背景技术随着无人机技术的飞速发展,无人机在军事、民用和商业领域的应用越来越广泛。
然而,现有的无人机在[性能、稳定性、续航能力等方面]存在一定的局限性。
因此,有必要研究一种具有[优良性能、高稳定性、长续航能力等特点]的无人机及其控制系统,以满足不断增长的市场需求。
三、发明内容本发明的目的在于提供一种[无人机名称],具有[优良性能、高稳定性、长续航能力等特点],能够[实现特定功能]。
本发明的技术方案如下:1. 一种[无人机名称],包括:a) 机身部分,用于承载飞行器及其设备;b) 动力系统,用于提供飞行动力;c) 控制系统,用于控制飞行器的飞行轨迹和姿态;d) 传感器系统,用于获取飞行器飞行过程中的各项数据;e) 通信系统,用于实现飞行器与地面站之间的数据传输;f) 载荷部分,用于携带各种任务设备。
2. 所述[无人机名称]的控制系统,包括:a) 飞行控制单元,用于处理飞行数据,控制飞行器的飞行轨迹和姿态;b) 导航单元,用于确定飞行器的当前位置和目的地;c) 通信单元,用于与地面站进行数据交换;d) 电源管理单元,用于管理飞行器的电源系统;e) 任务设备控制单元,用于控制载荷部分的设备工作。
3. 所述[无人机名称]的优点在于:a) [性能优点],如[具体性能指标];b) [稳定性优点],如[具体稳定性指标];c) [续航能力优点],如[具体续航指标];d) [其他优点],如[具体描述]。
四、发明实施方式本发明的实施方式如下:1. 制作[无人机名称]的机身部分,选用轻质高强度的材料,以降低飞行器的整体重量;2. 选用高效的动力系统,如燃料电池或太阳能电池,提高飞行器的续航能力;3. 设计飞行控制系统,通过飞行控制单元、导航单元等模块,实现飞行器的稳定飞行和精确控制;4. 搭载合适的载荷设备,根据任务需求选择相应的传感器、通信设备等;5. 编写控制软件,实现飞行控制、导航、通信等功能;6. 进行飞行试验,验证[无人机名称]的性能和稳定性。
说明书摘要
本实用新型公开一种六旋翼飞行系统,包括控制器和飞行器,所述控制器包括微处理器及分别与微处理器电连接的位置锁定装置、航姿测量装置、油门和航向以及高度调节装置,所述飞行器包括处理器、无刷电机及分别与处理器电连接的定高装置和电机调速装置,所述飞行器的无刷电机与电机调速装置电连接,所述控制器和飞行器上设有相互电连接的无线通信装置,所述控制器的无线通信装置与微处理器电连接,所述飞行器的无线通信装置与处理器电连接。
本实用新型通过控制器和飞行器的相互配合工作,在一定程度上提高了六旋翼飞行系统的运行效率,为其它更多功能的拓展提供了基础。
相比其它的飞行系统,此系统结构更简单,更容易实现,降低了普通用户对飞行器的控制难度。
图1
权利要求书
1.一种六旋翼飞行系统,包括控制器和飞行器,所述控制器包括微处理器及分别与微处理器电连接的位置锁定装置、航姿测量装置、油门和航向以及高度调节装置,所述飞行器包括处理器、无刷电机及分别与处理器电连接的定高装置和电机调速装置,其特征在于,所述控制器和飞行器上设有相互电连接的无线通信装置,所述控制器的无线通信装置与微处理器电连接,所述飞行器的无线通信装置与处理器电连接,所述飞行器的无刷电机与电机调速装置电连接。
2.根据权利要求1所述的一种六旋翼飞行系统,其特征在于,所述位置锁定装置包括陀螺仪、加速度计和全球卫星定位系统(GPS)电路模块。
3.根据权利要求1所述的一种六旋翼飞行系统,其特征在于,所述航姿测量装置包括陀螺仪、加速度计、电子磁场计和温度传感器。
4.根据权利要求1所述的一种六旋翼飞行系统,其特征在于,所述航姿测量装置为三轴加速度陀螺仪传感器。
5.根据权利要求1所述的一种六旋翼飞行系统,其特征在于,所述定高装置包括超声波传感器和气压计传感器。
说明书
一种六旋翼飞行系统
技术领域
本实用新型涉及飞行器控制技术领域,具体涉及一种六旋翼飞行系统。
背景技术
在二十世纪初就出现的多旋翼飞行器拥有体积小、结构紧凑和可垂直起降的特点,被广泛应用于军事、警备和工农业生产等领域。
其中,以结构简单和成本低廉的四旋翼飞行器居多,但四旋翼飞行器载重低,滞空时间短,容错性不强。
相对于四旋翼飞行器,六旋翼飞行器多了两个电机,在自重提升不大的前提下,升力提升明显,并且通过各电机的调整,可达到较佳的容错控制效果。
由于成本高、控制策略复杂和续航时间短等缺点,六旋翼飞行器的发展和普及应用速度缓慢。
近年来,随着新型材料、微机电(MEMS)、微惯导(MIMU) 以及飞行控制等技术的发展,六旋翼飞行器的制造成本大为降低,其自适应飞行能力得到长足进步。
通过各种算法和数学模型可以灵活控制六个旋翼的旋转,实现垂直起降、定点悬停、旋转、侧飞、倒飞等功能。
六旋翼飞行器凭借载重能力强、可控度高、动作灵活以及容错性能好等优点成为国内外炙热的研究热点和技术攻关领域。
六旋翼飞行器控制研究的理论成果不少,但大多设计复杂,系统难以实现,对于普通用户而言难以实施操作。
实用新型内容
本实用新型的目的是解决现有技术的缺陷,提供一种结构简单,容易实现和操作的六旋翼飞行系统,采用的技术方案如下:
一种六旋翼飞行系统,包括控制器和飞行器,所述控制器包括微处理器及分别与微处理器电连接的位置锁定装置、航姿测量装置、油门和航向以及高度调节装置,所述飞行器包括处理器、无刷电机及分别与处理器电连接的定高装置和电机调速装置,所述飞行器的无刷电机与电机调速装置电连接,所述控制器和飞行器上设有相互电连接的无线通信装置,所述控制器的无线通信装置与微处理器电连接,所述飞行器的无线通信装置与处理器电连接。
位置锁定装置实时采集陀螺仪、加速度计和全球卫星定位系统的数据信号,
利用扩展卡尔曼滤波(EKF)算法测算飞行器所处的空间坐标,并于用户期望的悬停位置相比较,通过数字PID算法锁定空间位置。
航姿测量装置实时检测控制器的姿态、作业环境温度和磁场信息,并发送给微处理器,微处理器首先利用温度信息对陀螺仪输出数据进行实时温度漂移补偿,然后利用磁场信息对陀螺仪输出数据进行实时校准,最后利用四元素融合算法对姿态数据进行处理,得出可以控制驱动电机的欧拉角(即横滚角(θ)、俯仰角(ψ)和航向角(ϕ));通过油门和航向以及高度调节装置设定飞行器的油门值、航向角和高度值,并发送至微处理器;微处理器将处理后的姿态数据、油门值、航向角和高度值打包并通过无线通信装置发送至飞行器,飞行器接收控制器发送过来的数据同时,读取其自身的电子磁场计和定高装置采集的数据,交由处理器通过互补滤波融合和姿态解耦运算等算法解算出六路PWM值,分别输出六个通道的脉宽调制信号至电机调速装置,由电机调速装置驱动电机完成飞行器的平衡控制以及横滚、俯仰、偏航等空间六自由度的动作,实现在X、Y和Z 方向上的平稳运动。
本实用新型利用无线通信装置传输数据,将控制器和飞行器联系在一起,使得控制控制器的姿态就相当于控制飞行器的姿态。
控制器和飞行器分工合作,控制器负责姿态数据的收集、处理和数值的设定,而飞行器负责把接收的数据与其自身采集的数据进行融合运算再处理,发出六通道控制信号,完成既定的目标姿态运动。
本实用新型在一定程度上减轻了飞行器的负担,提高了整个飞行系统的运行效率,为其它更多功能的拓展提供了基础。
相比其它的飞行系统,此系统结构更简单,更容易实现,降低了普通用户对飞行器的控制难度。
作为优选,所述位置锁定装置包括陀螺仪、加速度计和全球卫星定位系统(GPS)电路模块。
作为优选,所述定高装置包括超声波传感器和气压计传感器。
本实用新型中,飞行器在低空飞行时,采用超声波传感器进行定高,在高空飞行时,采用气压传感器进行定高。
作为优选,所述航姿测量装置包括陀螺仪、加速度计、电子磁场计和温度传感器。
作为优选,所述航姿测量装置为三轴加速度陀螺仪传感器。
三轴加速度陀螺仪传感器分别采集控制器在X、Y、Z 轴上的加速度以及控
制器绕三轴旋转的角速度,发送给微处理器,经过温度补偿和磁场校准后进行姿态估计,采集互补滤波融合的数据并使用四元数法进行姿态解算,得到我们想要的欧拉角。
本实用新型的有益效果:通过控制器和飞行器的分工合作,在一定程度上减轻了飞行器的负担,提高了系统的运行效率,增强了人机交互性,降低了用户的操作难度。
相比其它的飞行系统,此系统结构更简单,更容易实现。
附图说明
图1是本实用新型的系统结构示意图。
具体实施方式
下面结合附图和实施例对本实用新型作进一步详细描述。
实施例:
如图1 所示,一种六旋翼飞行系统,包括控制器和飞行器,所述控制器包括微处理器及分别与微处理器电连接的位置锁定装置、航姿测量装置、油门和航向以及高度调节装置,所述飞行器包括处理器、无刷电机及分别与处理器电连接的定高装置和电机调速装置,所述飞行器的无刷电机与电机调速装置电连接,所述控制器和飞行器上设有相互电连接的无线通信装置,所述控制器的无线通信装置与微处理器电连接,所述飞行器的无线通信装置与处理器电连接。
所述位置锁定装置包括陀螺仪、加速度计和全球卫星定位系统(GPS)电路模块。
所述定高装置包括超声波传感器和气压计传感器。
所述航姿测量装置为三轴加速度陀螺仪传感器。
本实施例工作过程:三轴加速度陀螺仪传感器分别采集控制器在X、Y、Z 轴上的加速度以及控制器绕三轴旋转的角速度,发送给微处理器,经过温度补偿和磁场校准后进行姿态估计,采用互补滤波融合数据并使用四元数法进行姿态解算,得出可以控制驱动电机的欧拉角(即横滚角(θ)、俯仰角(ψ)和航向角(ϕ)),通过油门和航向以及高度调节装置设定飞行器的油门值、航向角和高度值,并发送至微处理器;微处理器将处理后的姿态数据、油门值、航向角和高度值打包并通过无线通信装置发送至飞行器,飞行器接收控制器发送过来的数据同时,读取其自身的电子磁场计和定高装置采集的数据,交由处理器通过互补滤波融合和姿
态解耦运算等算法解算出六路PWM值,分别输出六个通道的脉宽调制信号至电机调速装置,由电机调速装置驱动电机完成飞行器的平衡控制以及横滚、俯仰、偏航等空间六自由度的动作,实现在X、Y和Z方向上的平稳运动。
说明书附图。