自控系统方框图极性表示及动态波形图
- 格式:doc
- 大小:228.00 KB
- 文档页数:5


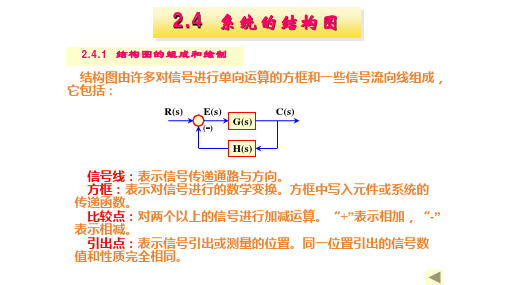
第四节自动控制系统方块图一.方块图的基本单元l.方块任何被研究的对象,如果可以抽象地用输入该对象的信号或变量以及从该对象输出的信号或变量表达时,就可以运用方块图方法中的方块来描述(下图)。
2.信号比较器一般采用符号“○”代表信号比较器。
如果信号线旁不带运算符号“+”或“-”,则默认为“+”。
3、信号分支点方块图中的信号分支,只要在信号线上任意点引出即可,分支点上的信号与原来的信号完全相同,如下图。
二、反馈原理反馈就是把系统的输出信号回送到系统的输入端并送加到输入信号中。
反馈分为正反馈和负反馈两种类型。
使输出信号与给定值的差趋于减小,这样的反馈称为负反馈,这样的系统称为负反馈系统。
几乎所有的自动控制系统都是负反馈控制系统。
三、传递函数为了描述控制系统中每一个部分或整个系统的输入变量与输出变量之间的关系,最常用的就是传递函数。
四、方块图的应用典型的简单反馈控制系统方块图如下图所示。
第五节控制系统分类一、各种分类的方法(l)如果按被控变量可划分为:温度、压力、液位、流量和成分等控制系统。
这是一种常见的分类。
(2)如果按被控系统中控制仪表及装置所用的动力和传递信号的介质可划分为:气动、电动、液动、机械式等控制系统。
(3)如果按被控制对象可划分为:流体输送设备、传热设备、精馏塔和化学反应器控制系统等。
(4)按调节器的控制规律可划分为:比例控制、积分控制、微分控制、比例积分控制、比例微分控制、比例积分微分控制等。
(5)按系统功能与结构可划分为:单回路简单控制系统;串级、比值、选择性、分程、前馈和均匀等常规复杂控制系统。
(6)按给定值的变化情况可划分为:定值控制系统、随动控制系统和程序控制系统。
第六节自动控制系统的过渡过程及品质指标一、瞬态响应分析方法瞬态响应分析方法的基本做法是:给系统输入各种不同的典型信号,观察并分析系统的响应曲线。
1、静态与动态静态是指该变量不随时间而变化的某个平衡状态;动态是指该变量随时间而变化的不平衡状态。


自动控制原理方框图自动控制原理方框图是指在自动控制原理的基础上,通过方框图的形式来描述和分析控制系统的结构和动态特性。
方框图是一种直观、简洁的表示方法,能够清晰地展现控制系统的各个组成部分之间的关系,有利于工程师们对控制系统进行分析、设计和调试。
在自动控制系统中,方框图是一种非常重要的工具,它能够帮助工程师们更好地理解系统的结构和工作原理,从而更好地进行系统的设计和优化。
方框图可以将控制系统的各个组成部分以及它们之间的相互作用清晰地表示出来,有利于工程师们对系统进行全面的分析和评估。
自动控制原理方框图主要包括系统的输入、输出、控制器、执行器和被控对象等几个基本组成部分。
通过方框图,我们可以清晰地看到这些组成部分之间的关系,以及它们是如何相互作用的。
这有助于工程师们更好地理解系统的工作原理,从而更好地进行系统的设计和调试。
在实际工程中,方框图常常被用于描述和分析各种类型的控制系统,比如PID控制系统、模糊控制系统、神经网络控制系统等。
通过方框图,工程师们可以清晰地看到系统的结构和动态特性,有助于他们更好地理解系统的工作原理,从而更好地进行系统的设计和调试。
除此之外,方框图还可以用于系统的故障诊断和故障排除。
通过对系统的方框图进行分析,工程师们可以清晰地看到系统中存在的问题,并且能够有针对性地进行故障排除。
这对于提高系统的可靠性和稳定性非常重要。
总的来说,自动控制原理方框图是一种非常重要的工具,它能够帮助工程师们更好地理解和分析控制系统,有助于他们更好地进行系统的设计和调试。
因此,掌握方框图的绘制和分析方法对于自动控制工程师来说是非常重要的。
希望通过本文的介绍,能够对方框图有一个更加清晰的认识。

直流可逆调速系统方框图及各种状态下对应各点极性表示
3.2.1简要分析说明正向起动运行时系统工作过程。
并在逻辑选触无环流可逆直流调速系统原理图中标出正向运行时系统工作状态(各物理量的极性)。
=f(t)的波形试画出电动机从正向(900转/分)运行到反向(900转/分)运行时的n=f(t)和I
d
图并加以简单说明。
标出反向运行时系统工作状态(各物理量的极性)。
=f(t)的波形试画出电动机从正向(800转/分)运行到反向(800转/分)运行时的n=f(t)和I
d
图并加以简单说明。
正向制动时(它组逆变子阶段)系统工作状态(各物理量的极性)。
=f(t)的波形图并加以简单说明。
试画出电动机从正向1000 r/nim制动停车时的n=f(t)和I
d
标出反向制动停车(本组逆变阶段)时系统工作状态(各物理量的极性)。
=f(t)的波形图并加以简单说明。
试画出电动机从正向1200 r/nim制动停车时的n=f(t)和I
d
原理图中标出反向运行时系统工作状态(各物理量的极性)。
=f(t)的波形图并加以简单说试画出电动机从正向起动至1050 r/min稳定运行时的n=f(t)和I
d
明。




欧阳家百创编常见开环控制系统方框图欧阳家百(2021.03.07)开环控制系统:控制系统的输出量不对系统的控制产生任何影响。
开环控制系统特征:系统的输出量仅受输入量控制,输入,量到输出量之间的信号是单向传递。
开环控制系统的方框图:输入量——控制系统的给定量;输出量——控制系统所要控制的量;控制器——对输入信号进行处理并发出控制命令的装置或元件; 执行器——直接对被控对象进行控制的装置或元件; 被控对象——控制系统所要控制的装置或生产过程。
控制量——执行器的输出信号,一般是影响被控量变化的因素;(输出量≠控制量,输出量=被控量) 1.自动门的控制系统 自动门工作过程:(1)当有人到达门前某一距离时,传感器感知,并发出“有人”的信号(2)控制器接到传感器传来的信号后,经变换放大后传给电动机(这里的电动机叫做执行器,也称为驱动器);(3)电动机根据传来的开门信号转动,门被打开(这里的门叫做被控制对象,也称为控制对象,简称对象)(4)控制器保持开门信号延迟后,自动发出关门信号,电动机反转,门重新关闭。
自动门控制系统的方框图:输入量 (给定量)控制量欧阳家百创编3.家用窗帘自动控制系统4.楼道自动声控灯装置5.游泳池定时注水控制系统6.十字路口的红绿灯定时控制系统7.公园音乐喷泉自动控制系统8.自动升旗控制系统9.宾馆火灾自动报警系统控制量(转输入量控制量(电控制量(水流控制量(水流控制量(转速)控制量(转动) 控制量(电流)欧阳家百创编 10.宾馆自动叫醒服务系统11.公共汽车车门开关控制系统12.普通全自动洗衣机控制系统13.可调光台灯控制系统14.电吹风控制系统输入量(时间设定) 控制器(电脑) 执行器 (拨号装置)被控对象 (电话机) 输出量 (电话铃声)控制量(电流)输入量 (开、关信号) 控制器 (控制电路)执行器 (气动活塞)被控对象 (车门) 输出量(车门的开或关)控制量(行程)输入量 (通电、设定状态)控制器 (控制电路)执行器 (电机等装置)被控对象 (洗衣机) 输出量 (运行或停止)控制量(转动等)输入量 (设定的档位) 控制器(控制电路)执行器 (可变电阻) 被控对象 (灯泡) 输出量(灯泡亮度)控制量(电流) 输入量 (设定的档位)控制器 (控制电路)执行器 (风扇、电热被控对象 (电吹输出量 (风速、温控制量(电压)欧阳家百创编15.普通电风扇控制系统16.电饭锅煮饭控制系统17.手电筒控制系统18.家用缝纫机缝纫速度控制系统19.希罗的自动门控制系统20.电子门铃的开环电子控制系统21.利用遥控器转换电视频道控制量(转控制量(热控制量(电控制量(转控制量(轴转动)控制量(电流)控制量(电流)22.活动猴控制系统控制量(活动量)23.车俩超速检测系统控制量(执行信号)24.电动车的防盗报警系统控制量(电流)控制量(电流)25.路灯自动控制系统欧阳家百创编。




实验一 控制系统典型环节的模拟一、 实验目的1.熟悉超低频扫描示波器的使用方法2.掌握用运放组成控制系统典型环节的电子模拟电路3.测量典型环节的阶跃响应曲线4.通过本实验了解典型环节中参数的变化对输出动态性能的影响二、 实验仪器1.控制理论电子模拟实验箱一台2.超低频慢扫描示波器一台3.万用表一只三、 实验原理以运算放大器为核心元件,由其不同的输入R-C 网络和反馈R-C 网络构成控制系统的各种典型环节 。
四、 实验内容1.画出比例、惯性、积分、微分和振荡环节的电子模拟电路图。
2.观察并记录下列典型环节的阶跃响应波形。
1) 1)(1=s G 和2)(2=s G2) S s G 1)(1= 和Ss G 5.01)(2= 3) S s G +=2)(1 和S s G 21)(2+=4) 11)(1+=S s G 和15.01)(2+=S s G 5) 121)(2++=S S s G五、 实验报告要求1.画出五种典型环节的实验电路图,并注明参数。
2.测量并记录各种典型环节的单位阶跃响应,并注明时间坐标轴。
3.分析实验结果,写出心得体会。
六、 实验思考题1.用运放模拟典型环节是是时,其传递函数是在哪两个假设条件下近似导出的?2.积分环节和惯性环节主要差别是什么?在什么条件下,惯性环节可以近似地视为积分环节?在什么条件下,又可以视为比例环节?3.如何根据阶跃响应的波形,确定积分环节和惯性环节的时间常数。
实验二 一阶系统的时域响应及参数测定一、 实验目的1.观察一阶系统在阶跃和斜坡输入信号作用下的瞬态响应。
2.根据一阶系统的阶跃响应曲线确定一阶系统的时间常数。
二、 实验仪器1.控制理论电子模拟实验箱一台。
2.双踪低频慢扫描示波器一台。
3.万用表一只。
三、实验原理图2-1为一阶系统的方框图。
它的闭环传递函数为 11)()(+=TS s R s C 令1)(=t r ,即Ss R 1)(=, 则其输出为 图2-1TS S TS S s C 111)1(1)(+-=+= 对上式取拉氏变换,得 T te t C --=1)( 它的阶跃响应曲线如图2-2所示。

自动控制原理方框图自动控制原理方框图是指利用方框图的形式来描述自动控制系统的结构和工作原理。
方框图是自动控制原理中的重要工具,它能够直观地展示控制系统的各个部分之间的关系和作用,有助于工程师们更好地理解和设计控制系统。
在自动控制原理方框图中,通常包括输入端、输出端、控制器、执行器和被控对象等几个基本部分。
输入端是控制系统接收外部信号的地方,输出端则是控制系统输出控制信号的地方,控制器是控制系统的核心部分,它根据输入信号和系统反馈信息来生成控制信号,执行器则是根据控制信号执行相应的动作,被控对象则是控制系统需要控制的对象。
在方框图中,这几个部分通过箭头和线段连接起来,箭头表示信号的传递方向,线段则表示信号的传递路径。
通过这种方式,工程师们可以清晰地看到控制系统中各个部分之间的联系和作用,有助于他们更好地进行系统设计和调试。
在实际工程中,自动控制原理方框图被广泛应用于各种自动控制系统的设计和分析中。
无论是传统的PID控制系统,还是现代的模糊控制系统和神经网络控制系统,方框图都能够为工程师们提供直观的工具,帮助他们更好地理解和分析系统的结构和性能。
除此之外,自动控制原理方框图还能够为工程师们提供一个统一的语言和标准,方便他们之间的沟通和交流。
在实际工程中,不同的工程师可能来自不同的专业背景,有着不同的知识和经验,通过方框图,他们可以用统一的语言和标准来描述和分析控制系统,避免了因为专业术语和理论差异而导致的沟通障碍。
总的来说,自动控制原理方框图是自动控制原理中的重要工具,它能够直观地展示控制系统的结构和工作原理,有助于工程师们更好地理解和设计控制系统。
在实际工程中,方框图被广泛应用于各种自动控制系统的设计和分析中,为工程师们提供了一个统一的语言和标准,方便他们之间的沟通和交流。
因此,掌握自动控制原理方框图的基本原理和应用方法对于每一位自动控制工程师来说都是非常重要的。

直流可逆调速系统方框图及各种状态下对应各点极性表示
3.2.1简要分析说明正向起动运行时系统工作过程。
并在逻辑选触无环流可逆直流调速系统原理图中标出正向运行时系统工作状态(各物理量的极性)。
=f(t)的波形试画出电动机从正向(900转/分)运行到反向(900转/分)运行时的n=f(t)和I
d
图并加以简单说明。
标出反向运行时系统工作状态(各物理量的极性)。
=f(t)的波形试画出电动机从正向(800转/分)运行到反向(800转/分)运行时的n=f(t)和I
d
图并加以简单说明。
正向制动时(它组逆变子阶段)系统工作状态(各物理量的极性)。
=f(t)的波形图并加以简单说明。
试画出电动机从正向1000 r/nim制动停车时的n=f(t)和I
d
标出反向制动停车(本组逆变阶段)时系统工作状态(各物理量的极性)。
=f(t)的波形图并加以简单说明。
试画出电动机从正向1200 r/nim制动停车时的n=f(t)和I
d
原理图中标出反向运行时系统工作状态(各物理量的极性)。
=f(t)的波形图并加以简单说试画出电动机从正向起动至1050 r/min稳定运行时的n=f(t)和I
d
明。