电镀流水线的PLC课程教学设计
- 格式:doc
- 大小:2.71 MB
- 文档页数:14

PLC在电镀生产线控制系统中的应用设计引言电镀生产线是广泛应用于各种电子产品生产过程中的重要工艺环节之一。
电镀生产线通过将金属物体浸入带有金属离子的电镀液中进行电解沉积,从而实现在物体表面镀上一层金属薄膜。
为了确保电镀生产线的稳定和高效运行,PLC(可编程逻辑控制器)在控制系统中发挥了重要作用。
本文将介绍PLC在电镀生产线控制系统中的应用设计。
电镀生产线的工作流程在深入探讨PLC在电镀生产线控制系统中的应用设计之前,首先需要了解电镀生产线的工作流程。
通常情况下,电镀生产线的工作流程包括以下几个主要步骤:1.预处理:在电镀之前,需要对金属物体进行表面处理,以确保表面平整和清洁。
2.电镀:将经过预处理的金属物体浸入电镀液中,并通过电解沉积的方式,在物体表面形成金属薄膜。
3.清洗:在电镀完成后,需要对金属物体进行清洗以去除残留的电镀液和杂质。
4.干燥:清洗完毕后,将金属物体进行干燥,以确保表面不受潮湿影响。
PLC在电镀生产线中的应用设计PLC在电镀生产线控制系统中的设计主要包括输入/输出模块的选择、控制程序的编写和参数设置等方面。
输入/输出模块的选择在电镀生产线控制系统中,输入/输出模块用于将外部信号输入到PLC中,并将PLC的输出信号传输到外部设备中。
在选择输入/输出模块时,需要考虑以下几个因素:•输入/输出点数:根据生产线的规模和要控制的设备数量,选择相应点数的输入/输出模块。
•信号类型:根据实际情况选择电压信号、电流信号或数字信号等输入/输出模块。
•通信接口:选择支持与其他设备进行通信的输入/输出模块。
控制程序的编写在编写控制程序时,需要考虑以下几个关键的方面:•运行模式选择:根据电镀生产线的实际需求,选择手动模式或自动模式进行控制。
•控制算法设计:采用适当的控制算法,例如PID控制算法,以保持电镀过程中的稳定性和精确性。
•故障检测和报警:编写故障检测和报警程序,及时发现和处理系统中的异常情况。

第一章引言1、设计目的和任务及内容1.1、设计目的综合运用本课程及前期课程的相关知识和技能,相对独立地设计和调试一个小型PLC应用系统,使学生获得控制技术工程的基本训练,提高工程意识和实践技能。
同时提高学生对文献资料的检索和信息处理的能力,以及编写和整理设计文档的能力。
1.2、设计任务熟悉工艺流程及生产设备的工作原理;根据控制要求,画出硬件电路图、PLC 接线图及控制梯形图;利用编程软件编制程序,可先在计算机上进行仿真,然后在实验室完成调试;完成课程设计说明书。
1.3、设计内容电镀生产线采用专用行车,行车架上装有可升降的吊钩。
行车和吊钩各由一个电动机拖动。
行车的进退和吊钩的升降均由相应的限位开关定位。
假定该生产线有三个槽位。
工艺要求:工件放入镀槽中,电镀280s后提起,停放28s,让镀液从工件上流回镀槽,然后放入回收液槽中浸30s,提起后停15s,接着放入清水槽中清洗30s。
最后提起停15s后,行车返回原位,电镀一个工件的全过程结束。
系统有自动和手动两种操作模式。
第二章系统硬件设计2.1、系统硬件配置及组成原理2.1.1、电气控制线路的设计本自动线中的电动机控制线路,采用交流380/220V电源供电,电源开关采用刀开关与自动开关串连的组合形式,其中刀开关起隔离电源、安全检修的作用,自动开关起短路保护作用。
电动机控制线路中各电机主电路接于380V电源,控制电路接于220V电源。
各电机主电路采用接触器控制,并采用热继电器作过载保护,其中行车电机和吊钩电机采用电磁抱闸制动。
因实际需要,吊钩电机采用转子串电阻起动。
因此,电镀行车电动机的主电路、局部照明电路、向PLC负载供电的直流稳压电源。
2.1.2、电动机的设计本文采用三相异步电动机控制作为行车和吊钩的动力单元。
三相异步电动机具有结构简单,维护容易,运行可靠,价格便宜,具有较好的为太和动态特性的有点。
2.1.3、PLC的选型PLC的选型在PLC的应用设计当中非常的重要,目前在国内外生产的PLC种类很多,在选用PLC时应考虑以下几点:首先规模要适当。

电气控制技术课程设计设计题目: 电镀生产线的PLC控制专业班级: 13级自动化三班姓名:龚伟学号:指导老师:刘传文日期:题目:电镀生产线的PLC控制一.课题分析1 课题要求本课题是为了电镀车间提高工效、促进生产自动化以及减轻劳动强度而设计的一种专门半自动起吊设备,采用远距离控制。
起吊物品为待进行电镀或表面处理的各种产品零件。
电镀生产过程是由人工将待加工零件装入吊篮(或挂钩上),在发出信号后,起吊设备便逐段前进,按工艺要求,在需要停留的一段时间(电镀)后,自动提升。
如此完成电镀工艺规定的每一道工序后,返回起吊位置,卸下加工好的零件,为下一次加工做好准备。
电镀系统结构示意图如图所示。
1镀槽2第一电解液回收槽3第二电解液回收槽4第三电解液回收槽5挂件架6吊钩7回车电解工艺:先将待镀工件放入槽内2min,然后提起悬停30s,随后放入第一电镀液回收槽内浸32s,提起悬停16s,再放入第二电镀液回收槽内浸32s,提起悬停16s,如此循环直到加工过程结束。
整个过程为:从原始位置开始,行车7停在挂件架放在固定架上,由操作人员将待镀工件挂在挂具上,挂钩6勾住挂架然后启动系统工作,如图。
2、控制要求电镀流水线顺序控制系统的动力配置两台电动机。
行车架前的后移由行车电动机MA1控制,其功率为4kw,提升电动机MA2控制吊钩上升和下放,其功率为2.5kw。
吊钩上升,提起待镀工件,其上升高度由行程开关控制。
(1)手动调试和检修SF0手柄指向左45°时,接点SF0-1接通,通过SF1、SF1控制按钮,行车架前后移动,通过SF3、SF4控制按钮,吊钩上升与下放,以便于系统调试和检修。
有超限保护。
(2)自动/停车功能SF0手柄指向右45°时,接点SF0-2接通,按下自动启动按钮SF5,自动运行。
1*行车架携带待镀工件向前运动至槽上方,由行程开关控制其停止向前运动。
2*吊钩下放到一定位置,停车,待镀工件浸入槽内2min。

第一章引言1、设计目的和任务及内容1.1、设计目的综合运用本课程及前期课程的相关知识和技能,相对独立地设计和调试一个小型PLC应用系统,使学生获得控制技术工程的基本训练,提高工程意识和实践技能。
同时提高学生对文献资料的检索和信息处理的能力,以及编写和整理设计文档的能力。
1.2、设计任务熟悉工艺流程及生产设备的工作原理;根据控制要求,画出硬件电路图、PLC接线图及控制梯形图;利用编程软件编制程序,可先在计算机上进行仿真,然后在实验室完成调试;完成课程设计说明书。
1.3、设计内容电镀生产线采用专用行车,行车架上装有可升降的吊钩。
行车和吊钩各由一个电动机拖动。
行车的进退和吊钩的升降均由相应的限位开关定位。
假定该生产线有三个槽位。
工艺要求:工件放入镀槽中,电镀280s后提起,停放28s,让镀液从工件上流回镀槽,然后放入回收液槽中浸30s,提起后停15s,接着放入清水槽中清洗30s。
最后提起停15s后,行车返回原位,电镀一个工件的全过程结束。
系统有自动和手动两种操作模式。
第二章系统硬件设计2.1、系统硬件配置及组成原理2.1.1、电气控制线路的设计本自动线中的电动机控制线路,采用交流380/220V电源供电,电源开关采用刀开关与自动开关串连的组合形式,其中刀开关起隔离电源、安全检修的作用,自动开关起短路保护作用。
电动机控制线路中各电机主电路接于380V电源,控制电路接于220V电源。
各电机主电路采用接触器控制,并采用热继电器作过载保护,其中行车电机和吊钩电机采用电磁抱闸制动。
因实际需要,吊钩电机采用转子串电阻起动。
因此,电镀行车电动机的主电路、局部照明电路、向PLC负载供电的直流稳压电源。
2.1.2、电动机的设计本文采用三相异步电动机控制作为行车和吊钩的动力单元。
三相异步电动机具有结构简单,维护容易,运行可靠,价格便宜,具有较好的为太和动态特性的有点。
2.1.3、PLC的选型PLC的选型在PLC的应用设计当中非常的重要,目前在国内外生产的PLC种类很多,在选用PLC时应考虑以下几点:首先规模要适当。
电镀车间专用行车PLC控制系统设计1.1 电镀生产线简介随着我国国民经济的迅速发展,电镀与精饰的新技术,新工艺不断涌现。
电镀生产线实现的是一个复杂的工艺生产过程,需要控制电镀时间,电镀电流,电压,溶液浓度,温度,相关的周边设备控制及生产过程自动化。
电动行车是现代化工厂中用于物料输送的重要设备,传统的控制方式下,大都采用人工操纵的半自动控制方式。
在许多场合,为了提高工作效率、促进生产自动化和减轻劳动效率,往往需要实现电动行车的自动化控制。
实现自动化控制,可以使行车能够按照预定顺序和控制要求,自动完成一系列的工作。
1.2电镀车间行车专用PLC控制系统设计内容1.2.1设备基本情况该电镀自动线是某厂电镀车间为提高工效、促进生产自动化和减轻劳动强度而提出制造的一台专用半自动起吊设备。
采用远距离控制,起吊重量在500千克以下,起吊物品是待进行电镀及表面处理的各种产品零件。
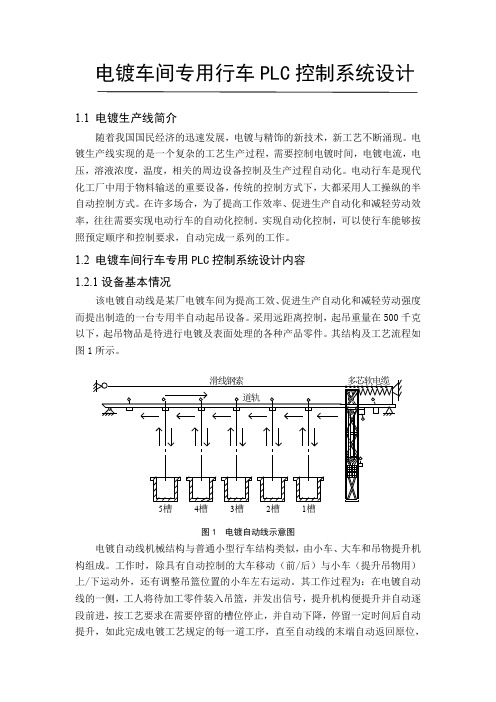
其结构及工艺流程如图1所示。
图1 电镀自动线示意图电镀自动线机械结构与普通小型行车结构类似,由小车、大车和吊物提升机构组成。
工作时,除具有自动控制的大车移动(前/后)与小车(提升吊物用)上/下运动外,还有调整吊篮位置的小车左右运动。
其工作过程为:在电镀自动线的一侧,工人将待加工零件装入吊篮,并发出信号,提升机构便提升并自动逐段前进,按工艺要求在需要停留的槽位停止,并自动下降,停留一定时间后自动提升,如此完成电镀工艺规定的每一道工序,直至自动线的末端自动返回原位,卸下处理好的零件,重新发出信号进入下一加工循环。
对于不同零件,其镀层要求和工艺过程是不相同的,则自动线上镀槽的数量也不相同,该控制系统能对不同工艺过程(如镀锌、镀铬、镀镍镉)有程序预选和修改能力。
该自动线有5个电镀槽,各槽停留时间由用户根据工艺要求进行整定。
1.2.2 拖动系统专用行车的小车、大车和升降运动均采用三相交流异步电动机(Y802-4,0.75kW、2A、1390r/min、380V)分别拖动,并采用一级机械减速。

2023电镀流水线的PLC课程设计1. 简介本文档提供了2023年电镀流水线的PLC课程设计的详细概述和设计方案。
在本课程设计中,我们将使用PLC(可编程逻辑控制器)来控制电镀流水线的各个工艺环节,以实现自动化控制和优化生产效率。
2. 目标本课程设计的目标如下:1.了解电镀流水线的工艺流程和基本原理;2.学习PLC的基本原理和编程技巧;3.设计和实现PLC控制电镀流水线的各个工艺环节;4.优化电镀流水线的生产效率和质量。
3. 课程大纲下面是本课程设计的大纲:3.1 基础知识•电镀流水线的工艺流程和原理介绍;•PLC的基本原理和功能;•PLC编程语言和运行环境。
3.2 PLC设计和布局•确定PLC的类型和规格;•设计PLC系统的整体结构和布局;•连接电镀流水线的传感器和执行器。
3.3 PLC编程•学习PLC编程语言,如ladder diagram(梯形图);•设计和实现各个工艺环节的PLC控制程序;•进行PLC程序的调试和测试。
3.4 性能优化•优化电镀流水线的生产效率和质量;•使用PLC的高级功能,如数据采集和监控;•添加故障检测和报警系统。
4. 实验和作业本课程设计将包括以下实验和作业:1.实验1:了解电镀流水线的工艺流程和原理;2.实验2:学习PLC编程语言,如 ladder diagram;3.实验3:设计和实现电镀流水线的PLC控制程序;4.实验4:优化电镀流水线的生产效率和质量;5.作业1:撰写实验报告,总结实验过程和结果;6.作业2:完成一个综合性的课程设计项目。
5. 考核方式本课程设计将根据以下方式进行考核:1.实验报告的质量和完整性;2.课程设计项目的实现程度和优化效果;3.课堂表现和参与度。
6. 参考资料以下是本课程设计的参考资料:•《PLC原理与应用》- 张三等著;•《电镀流水线技术手册》- 李四等编著;•PLC制造商提供的技术文档和编程手册。
以上是2023年电镀流水线的PLC课程设计的概述和设计方案。
电镀自动生产线P L C 控制课程设计标准化管理处编码[BBX968T-XBB8968-NNJ668-MM9N]《电气与PLC控制系统设计》指导及任务书设计课题:电镀自动生产线PLC控制设计专业建筑电气与智能化学生姓名班级学号指导教师设计地点起至时间发放日期电气工程学院目录第一章概述1.1 电镀工艺的发展1.2 PLC- FX2N第二章电镀生产线总体设计说明2.1 电镀自动生产线示意图2.2 电镀自动生产线控制要求第三章控制系统设计说明3.1主电路设计说明3.2 PLC输入输出接线图设计说明3.3 控制面板元件布置图的设计 3.4 梯形图设计说明3.5 操作控制设计说明3.6 主要电器元件选择说明3.7 元器件目录表第四章设计小节概述1.1 电镀工艺的发展电镀生产作为一种传统产业自开始以来,几十年间有了极大的发展,从早期的纯手工作坊生产发展到今天的半自动甚至全自动生产,电镀工业的进步巨大的,电镀产品的种类和电镀工艺的复杂程度也是发生了极大的变化,大道汽车、飞机,小到生活用品金银首饰,各式各样的赣南工业产品都离不开电镀技术,电镀技术已发展形成一个重要的工程领域一个表面工程。
近年来随着生产的发展和不同产品工艺的特殊要求,电镀生产的生产过程在有些淋雨显得相当复杂,有许多条流水线构成一套完整的生产线,这就要各流水线之前能实现互联,因而PLC技术开始引入电镀。
质量优秀的电镀产品不光需要好的电镀工艺和镀液添加剂,还需要保证电镀产品按照电镀工艺流程运行以及电镀时间,这些都是决定电镀产品质量的重要因素。
因此PLC的引入尤为重要。
1.2 PLC- FX2N三菱FXPLC是小形化,高速度,高性能和所有方面都是相当FX系列中最高档次的超小程序装置,除输入出16~25点的独立用途外,还可以适用于多个基本组件间的连接,模拟控制,定位控制等特殊用途,是一套可以满足多样化广泛需要的PLC。
特点 -系统配置即固定又灵活;-编程简单;备有可,丰富的品种;令人放心的高性能;高速运算;使用于多种特殊用途;外部机器通讯简单化;共同的外部设备。
《封面》天津大学仁爱学院PLC课程设计报告设计题目:电镀流水线专业班级:自动化学生姓名:学生学号:指导教师:张海玮武波成绩:2016年10 月12 日目录引言 (2)1.设计目的 (2)2.设计内容及实现目标 (2)3.I/O分配 (3)系统总体方案设计 (4)控制系统设计 (4)1.控制系统流程图 (4)2.梯形图 (5)3.控制程序设计思路 (8)系统调试及结果分析 (8)总结收获及心得 (9)一、引言课程设计目的:根据控制要求,明确设计任务,拟定设计方案与进度计划,运用所学的理论知识,进行电镀流水线运行原理设计、硬件系统设计、软件系统设计、触摸屏设计、创新设计,提高理论知识工程应用能力、系统调试能力、分析问题与解决问题的能力。
设计内容及实现的目标:1、初始状态SQ1、SQ2、SQ3、SQ4、SQ5、SQ6为限位开关。
SQ4、SQ5灯亮,表示M1、M2在取物台的正上方;SQ1、SQ2、SQ3、SQ6和M1、M2均为OFF。
2、启动操作1)按下启动按钮,工作信号灯亮,表示系统可以工作。
2秒后,M2下(Y3)得电下行取待加工元件;SQ6灯亮表示可以取元件,M2下失电;5秒后M2上(Y4)得电,取待加工元件上行;SQ5灯亮表示上行到位,M2上失电。
2)电机M1后(Y1)得电后行,直到碰到SQ1限位开关才停止,M2下(Y3)得电下行放元件;SQ6灯亮表示下放结束,电极(Y5)得电进行电镀。
10秒后结束电镀,M2上(Y4)得电上行,到达SQ5后,M2上失电。
3)M1前(Y2)得电前行,到达SQ2位置停止,进行回收液处理工作。
同样是M2下(Y3)得电下行,5秒后M2上(Y4)得电上行;当碰到SQ5后再前行,到达SQ3位置停止,进行清水处理工作。
同样是M2下(Y3)得电下行,5秒后M2上(Y4)得电上行;当碰到SQ5后再前行,到达SQ4后停止M1前(Y2)前行。
4)当到达SQ4后,开始将被加工元件下放到取物台上,并取下一个待加工元件,进行下一个循环。
可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。
它采用了可编程序的存储器,用来在其内部存储执行逻辑运算,顺序控制、定时、计数和算术运算等操作的指令,并通过数字式和模拟式的输入和输出,控制各种类型的机械或生产过程。
可编程控制器及其有关外围设备,易于与工业控制系统联成一个整体,易于扩充其功能的设计。
可编程控制器对用户来说,是一种无触点设备,改变程序即可改变生产工艺。
目前,可编程控制器已成为工厂自动化的强有力工具,得到了广泛的普及推广应用。
本次课程设计通过对实际电镀自动生产线的生产过程进行简单化,掌握电镀生产线工作的实际流程及工作原理。
在此基础上,利用实验台设备对生产过程实现PLC控制。
按照生产的实际需要,主要设计内容包括电路安全及事故及时中断处理问题、小车工序(对应工作槽)的选择问题、小车精确停位问题、吊篮停位问题及实现互锁自锁等保障安全的问题。
此外,在设计中,除了实现生产线的生产流程,为了尽量贴合实际,采用四种操作方式(循环、单周期、单步、手动)进行程序设计。
本次设计的目的是初步了解工业生产实际过程,熟悉PLC程序设计及硬件连接,初步掌握程序的调试。
关键字:可编程逻辑控制器,梯形图,电镀自动化生产线1 系统方案设计1.1 系统硬件配置及组成原理 (3)1.2 系统变量定义及分配表 (5)1.3 PLC接线设计图 (5)1.4 系统可靠性设计 (6)2 控制系统设计2.1 控制程序流程图设计 (7)2.2 控制程序设计思路 (7)3 系统调试及结果分析3.1 系统调试及解决的问题 (12)3.2 结果分析 (13)结束语 (14)参考文献 (14)1系统方案设计1.1系统硬件配置及组成原理1.1.1 PLC相关基础知识可编程控制器,简称PLC(Programmable logic Controller),是指以计算机技术为基础的新型工业控制装置。
在1987年国际电工委员会(International Electrical Committee)颁布的PLC标准草案中对PLC做了如下定义:“PLC是一种专门为在工业环境下应用而设计的数字运算操作的电子装置。
《电气与PLC控制系统设计》指导及任务书设计课题: 电镀自动生产线PLC控制设计专业建筑电气与智能化学生姓名班级学号指导教师设计地点起至时间发放日期电气工程学院第一章概述1.1 电镀工艺的发展1.2 PLC- FX2N第二章电镀生产线总体设计说明2.1 电镀自动生产线示意图2.2 电镀自动生产线控制要求第三章控制系统设计说明3.1主电路设计说明3.2 PLC输入输出接线图设计说明3.3 控制面板元件布置图的设计 3.4 梯形图设计说明3.5 操作控制设计说明3.6 主要电器元件选择说明3.7 元器件目录表第四章设计小节1.1 电镀工艺的发展电镀生产作为一种传统产业自开始以来.几十年间有了极大的发展.从早期的纯手工作坊生产发展到今天的半自动甚至全自动生产.电镀工业的进步巨大的.电镀产品的种类和电镀工艺的复杂程度也是发生了极大的变化.大道汽车、飞机.小到生活用品金银首饰.各式各样的赣南工业产品都离不开电镀技术.电镀技术已发展形成一个重要的工程领域一个表面工程。
近年来随着生产的发展和不同产品工艺的特殊要求.电镀生产的生产过程在有些淋雨显得相当复杂.有许多条流水线构成一套完整的生产线.这就要各流水线之前能实现互联.因而PLC技术开始引入电镀。
质量优秀的电镀产品不光需要好的电镀工艺和镀液添加剂.还需要保证电镀产品按照电镀工艺流程运行以及电镀时间.这些都是决定电镀产品质量的重要因素。
因此PLC的引入尤为重要。
1.2 PLC- FX2N三菱FXPLC是小形化.高速度.高性能和所有方面都是相当FX系列中最高档次的超小程序装置.除输入出16~25点的独立用途外.还可以适用于多个基本组件间的连接.模拟控制.定位控制等特殊用途.是一套可以满足多样化广泛需要的PLC。
特点 -系统配置即固定又灵活;-编程简单;备有可自由选择.丰富的品种;令人放心的高性能;高速运算;使用于多种特殊用途;外部机器通讯简单化;共同的外部设备。
1、本课程设计目的根据要求设计出合理的PLC控制装置,学习使用PLC实现对工业过程的控制。
在设计过程中要全面的考虑各种影响因素,提高设计的程序的可靠性,结合实际情况综合的加深自己对PLC的各种基础知识加以理解消化吸收,提高动手能力和工程素养。
2、设计指标与要求本选题是为了电镀车间提高工效、促进生产自动化以及减轻劳动强度而设计的一种专用半自动起吊设备,采用远距离控制。
起吊物品为待进行电镀或进行表面处理的各种产品零件。
电镀生产过程是由人工将待加工零件装入吊篮(或挂钩上),在发出信号后,起吊设备便提升并逐段前进,按工艺要求,在需要停留的槽位上停止,并自动下降,下降到位并且停留一段时间(电镀)后,自动提升。
如此完成电镀工艺规定的每一道工序后,返回起吊位置,卸下加工好的零件,为下一次加工做好准备。
电镀系统结构示意图如图所示。
3.课程设计报告内容与设计步骤(1)设计的任务分析与计算1.课题要求1.电镀流水线顺序控制系统的动力配置两台电动机。
行车架前的后移动由行车电动机M1 控制,其功率为4kW;提升电动机M2控制吊钩上升与下放,其功率为2.5 kW。
吊钩上升,提起待镀工件,其上升高度由行程开关控制。
2.行车架携待镀工件向前运动至槽上方,由行程开关控制其停止向前运动(制动)。
3.吊钩下放到一定位置,制动停车,待镀工件浸入槽内2min。
4.吊钩提升待镀工件到位后停止(制动),在镀槽上方停30s。
5.行车架携工件运动至第一电镀液回收槽上方,由限位开关控制停止(制动)。
6.吊钩下放,其工作情况与3过程相同,浸入槽内时间为32s。
7.与4过程相同,停留时间为16s。
8.以后工作重复上述过程。
2.工艺过程电镀工艺流程图如图所示。
先将待镀工件放人槽内2min,然后提起悬停30s,随后放人第一电镀液回收槽内浸32s,提起悬停16s,再放人第二电镀液回收槽内浸32s,提起悬停16s,如此循环直到加工过程结束。
整个过程为:从原始位置开始,行车7停在挂件架5前,挂件架放在固定支架上,由操作人员将待镀工件挂在挂具上,吊钩6勾住挂件架然后启动系统工作(见图)。
3.时序分析4.主电路设计计算在本设计中,装置的运行主要是通过两个电动机的运转实现,在工业控制中,可以直接使用220V电压供电。
5.控制方法设计本次课程设计,通过编写较为简单的PLC程序使电镀流水线的控制得以实现。
在设计过程中,电镀流水线顺序控制系统的动力配置两台电动机。
行车架前的后移动由行车电动机M1 控制,其功率为4kW;提升电动机M2控制吊钩上升与下放,其功率为2.5 kW。
吊钩上升,提起待镀工件,其上升高度由行程开关控制。
(2)PLC输入/输出接口地址的分配、接口电路图1.PLC选型控制系统采用了8输入4输出,选用S7-200的CPU222即可,但基于在实际中的使用情况,一般选用CPU224。
本此设计使用的就是CPU224。
2.主电路图及相关功能说明上图为系统的主电路图:图中,FA起到了短路保护作用,即当控制线路发生短路故障时,控制线路应能迅速切除电源,FA可以完成主电路的短路保护任务。
QA为通电开关,当QA 闭合时,就可以用控制电路控制系统的运行。
QA0为控制电动机M1向前(正转)移动的主开关,QA1为控制其向后(反转)移动的主开关;QA2为控制电动机M2上升(正转)的主开关,QA3为控制电动机M2下降(反转)的主开关。
电路中的BB1和BB2在电路中起到了过载保护作用,由于电动机长期超载运行,会造成电动机绕组温度升到超过其允许值而损坏,所以要采取过载保护,其特点为:负载电流越大,保护动作时间越快,但不能受电动机启动电流影响而动作。
3.PLC输入/输出地址分配输入设备I/O地址输出设备I/O地址M1向前(正转)移动开关I0.0 控制前后移动电动机M1正转接触器KMlQ0.1M1向后(反转)移动开关I0.1 控制前后移动电动机Ml反转接触器KM2Q0.2 M2上升(正转)开关I0.2 M2上升正转接触器KM3 Q0.3 M2下降(反转)开关I0.3 M2下降反转接触器KM4 Q0.4 槽1的限位开关I0.4槽2的限位开关I0.5槽3的限位开关I0.6槽4的限位开关I0.74.PLC外部接线及相关说明如上图所示,I0.0对应M1向前(正转)移动开关,。
I0.1对应M1向后(反转)移动开关。
I0.2对应 M2上升(正转)开关,同时间接控制定时器的工作。
I0.3对应M2下降(反转)开关,同时间接控制定时器的工作。
I0.4为槽1的限位开关,可以控制电动机M2工作,也可以间接控制电动机M1停止。
I0.5为槽2的限位开关,可以控制电动机M2工作,也可以间接控制电动机M1停止。
I0.6为槽3的限位开关,可以控制电动机M2工作,也可以间接控制电动机M1停止。
I0.7为槽4的限位开关,可以控制电动机M2工作,也可以间接控制电动机M1停止。
Q0.1是用来控制前后移动电动机M1正转接触器KM l。
Q0.2是用来控制前后移动电动机M l反转接触器KM 2。
Q0.3 是用来控制M2上升正转接触器KM3。
Q0.4是用来控制M2下降反转接触器KM4。
(3)梯形图设计及相关分析1. 根据(1)设计PLC梯形图PLC梯形图见附录.-2.编制程序STL如下面所示:Network 1LD SM0.1S S0.0, 1 Network 2LSCR S0.0 Network 3LD I0.0S Q0.1, 1 Network 4LD I0.4R Q0.1, 1 SCRT S0.1 Network 5 SCRENetwork 6LSCR S0.1 Network 7LD SM0.0S M1.0, 1 Network 8LD I0.3R M1.0, 1 SCRT S0.2 Network 9 SCRENetwork 10 LSCR S0.2 Network 11LD SM0.0 TON T37, 120 Network 12LD T37 SCRT S0.3 Network 13 SCRENetwork 14 LSCR S0.3 Network 15LD SM0.0S M1.1, 1 Network 16 LD I0.2R M1.1, 1 SCRT S0.4 Network 17 SCRENetwork 18 LSCR S0.4 Network 19LD SM0.0 TON T38, 30 Network 20LD T38 SCRT S0.5 Network 21 SCRENetwork 22 LSCR S0.5 Network 23LD SM0.0 S M1.2, 1 Network 24LD I0.5R M1.2, 1 SCRT S0.6 Network 25 SCRENetwork 26 LSCR S0.6 Network 27LD SM0.0 S M1.3, 1 Network 28LD I0.3R M1.3, 1 SCRT S1.0 Network 29 SCRENetwork 30 LSCR S1.0 Network 31LD SM0.0.-TON T39, 32 Network 32LD T39 SCRT S1.1 Network 33 SCRENetwork 34 LSCR S1.1 Network 35LD SM0.0 S M1.4, 1 Network 36LD I0.2R M1.4, 1 SCRT S1.2 Network 37 SCRENetwork 38 LSCR S1.2 Network 39LD SM0.0 TON T40, 16 Network 40LD T40 SCRT S1.3 Network 41 SCRENetwork 42 LSCR S1.3 Network 43LD SM0.0 S M1.5, 1 Network 44LD I0.6R M1.5, 1 SCRT S1.4 Network 45 SCRENetwork 46 LSCR S1.4 Network 47LD SM0.0 S M1.6, 1 Network 48 LD I0.3R M1.6, 1 SCRT S1.5 Network 49 SCRENetwork 50 LSCR S1.5 Network 51LD SM0.0 TON T41, 32 Network 52LD T41 SCRT S1.6 Network 53 SCRENetwork 54 LSCR S1.6 Network 55LD SM0.0 S M1.7, 1 Network 56LD I0.2R M1.7, 1 SCRT S2.0 Network 57 SCRENetwork 58 LSCR S2.0 Network 59LD SM0.0 TON T42, 16 Network 60LD T42 SCRT S2.1 Network 61 SCRENetwork 62 LSCR S2.1 Network 63LD SM0.0 S M2.0, 1 Network 64LD I0.7R M2.0, 1SCRT S2.2 Network 65 SCRENetwork 66 LSCR S2.2 Network 67LD SM0.0 S M2.1, 1 Network 68LD I0.3R M2.1, 1 SCRT S2.3 Network 69 SCRENetwork 70 LSCR S2.3 Network 71LD SM0.0 TON T43, 32 Network 72LD T43 SCRT S2.4 Network 73 SCRENetwork 74 LSCR S2.4 Network 75LD SM0.0 S M2.2, 1 Network 76LD I0.2R M2.2, 1 SCRT S2.5 Network 77 SCRENetwork 78 LSCR S2.5 Network 79LD SM0.0 TON T44, 16 Network 80LD T44 SCRT S0.0 Network 81 SCRENetwork 82LD M1.2O M1.5O M2.0= Q0.2 Network 83LD M1.1O M1.4O M1.7O M2.2= Q0.3 Network 84LD M1.0O M1.3O M1.6O M2.1= Q0.4(4)调试过程1.调试设备介绍调试过程中采用了YHSMS-A型可编程控制器实验系统V2.0,V4.0 STEP7 MicroWIN SP3软件和西门子S7-200模拟仿真软件。
2.调试方法首先,将已编好的PLC程序输入到V4.0 STEP7 MicroWIN SP3软件,当编译无错误的话,运行程序,此时可以在此软件上采用开始程序状态监控,就可以看到程序运行的状态,从而进行程序分析,纠正其中不合理之处。