机械原理内燃机课程设计
- 格式:doc
- 大小:160.00 KB
- 文档页数:8
机械原理课程设计说明书题目:单缸四冲程内燃机机构设计及其运动分析二级学院机械工程学院年级专业 13材料本科班学号学生姓名指导教师朱双霞教师职称教授目录第一部分绪论 (2)第二部分设计题目及主要技术参数说明 (3)2.1 设计题目及机构示意图 (3)2.2 机构简介 (3)2.3 设计数据 (4)第三部分设计内容及方案分析 (6)3.1 曲柄滑块机构设计及其运动分析 (6)3.1.1 设计曲柄滑块机构 (6)3.1.2 曲柄滑块机构的运动分析 (7)3.2 齿轮机构的设计 (11)3.2.1 齿轮传动类型的选择 (12)3.2.2 齿轮传动主要参数及几何尺寸的计算 (13)3.3 凸轮机构的设计 (13)3.3.1 从动件位移曲线的绘制 (14)3.3.2 凸轮机构基本尺寸的确定 (15)3.3.3 凸轮轮廓曲线的设计 (16)第四部分设计总结 (18)第五部分参考文献 (20)第六部分图纸 (21)第一部分绪论1.本课程设计主要内容是单缸四冲程内燃机机构设计及其运动分析,在设计计算中运用到了《机械原理》、《理论力学》、《机械制图》、《高等数学》等多门课程知识。
2. 内燃机是一种动力机械,它是通过使燃料在机器内部燃烧,并将其放出的热能直接转换为动力的热力发动机。
通常所说的内燃机是指活塞式内燃机。
活塞式内燃机以往复活塞式最为普遍。
活塞式内燃机将燃料和空气混合,在其气缸内燃烧,释放出的热能是气缸内产生高温高压的燃气。
燃气膨胀推动活塞做功。
再通过曲柄连杆机构或其他机构将机械功输出,驱动从动机械工作。
内燃机的工作循环由进气、压缩、燃烧和膨胀、排气等过程组成。
这些过程中只有膨胀过程是对外做功的过程。
其他过程都是为更好的实现做功过程而需要的过程。
四冲程是指在进气、压缩、膨胀和排气四个行程内完成一个工作循环,此间曲轴旋转两圈。
进气行程时,此时进气门开启,排气门关闭;压缩行程时,气缸、内气体受到压缩,压力增高,温度上升;膨胀行程是在压缩上止点前喷油或点火,使混合气燃烧,产生高温、高压,推动活塞下行并做功;排气行程时,活塞推挤气缸内废气经排气门排出。
机械原理课程设计单缸一、教学目标本节课旨在让学生了解和掌握单缸机械原理的相关知识,包括其工作原理、结构特点和应用范围。
在知识目标方面,学生需要能够描述单缸内燃机的基本结构,解释其工作原理,并了解其在现代工业中的广泛应用。
技能目标方面,学生应通过实验和实践活动,培养观察、分析问题的能力,以及运用机械原理解决实际问题的能力。
情感态度价值观目标方面,学生应培养对机械工程的兴趣和好奇心,认识机械原理在现代科技发展中的重要性,从而提高其学习的积极性和主动性。
二、教学内容本节课的教学内容主要包括单缸内燃机的基本结构、工作原理和应用。
首先,介绍单缸内燃机的组成部分,如气缸、活塞、曲轴等,并讲解各部分的作用和相互关系。
其次,详细讲解单缸内燃机的工作原理,包括吸气、压缩、爆发和排气四个阶段。
最后,介绍单缸内燃机在现代工业中的应用,如汽车、发电机组等。
三、教学方法为了提高教学效果,本节课将采用多种教学方法。
首先,运用讲授法,为学生系统地讲解单缸内燃机的结构、原理和应用。
其次,采用讨论法,引导学生分组讨论单缸内燃机的工作过程,以及其在实际生活中的应用。
再次,运用案例分析法,分析一些典型的单缸内燃机故障案例,让学生学会运用机械原理解决问题。
最后,通过实验法,让学生亲自动手进行单缸内燃机的拆装和调试,增强其实践操作能力。
四、教学资源为了支持本节课的教学,我们将准备以下教学资源:教材《机械原理》,用于为学生提供系统性的理论知识;参考书《内燃机原理与应用》,为学生提供更深入的背景知识;多媒体教学课件,以图文并茂的形式展示单缸内燃机的结构和工作原理;实验设备,包括单缸内燃机模型、工具等,让学生能够亲身体验和操作。
此外,还将利用网络资源,如相关视频、论文等,为学生提供更多的学习资料和信息。
五、教学评估本节课的评估方式将采用多元化的形式,以全面、客观地评价学生的学习成果。
评估方式包括:平时表现,占30%,主要评估学生的课堂参与度、提问回答等;作业,占20%,主要评估学生的理解能力和实践能力;小测验,占20%,主要评估学生的知识掌握程度;实验报告,占15%,主要评估学生的实验操作能力和分析问题的能力;期末考试,占15%,全面考察学生的知识掌握和应用能力。
机械原理课程设计任务书
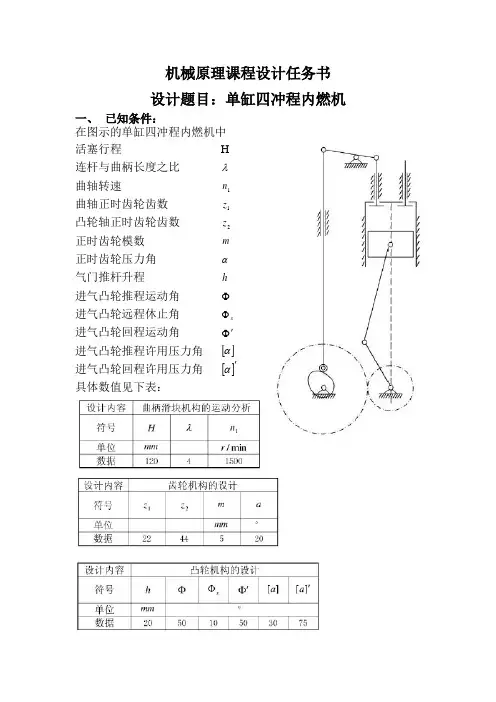
设计题目:单缸四冲程内燃机一、已知条件:
在图示的单缸四冲程内燃机中
活塞行程H
连杆与曲柄长度之比λ
曲轴转速
n
1
曲轴正时齿轮齿数
z
1
凸轮轴正时齿轮齿数
z
2
正时齿轮模数m
正时齿轮压力角α
气门推杆升程h
进气凸轮推程运动角Φ
进气凸轮远程休止角
Φ
s
进气凸轮回程运动角Φ'
进气凸轮推程许用压力角[]α
进气凸轮回程许用压力角[]'α
具体数值见下表:
进气门推杆的运动规律如下图所示:
二、设计任务
1.根据已知条件,要求完成如下设计任务:
●确定曲柄滑块机构杆件尺寸,绘制机构运动简图;利用图解法分
析机构的三个瞬时位置(用图纸绘制,与设计说明书一起上交)●计算齿轮机各部分参数。
●画出凸轮理论轮廓曲线和实际轮廓曲线
2.完成设计计算说明书一份(不少于3000字),内容包括:
●设计说明书封面
●目录
●机构简介与设计数据
●设计内容及方案分析
●设计体会
●主要参考文献
三、课程设计进程安排
本课程设计共计一周(五天),时间分配见下表。
内燃机的课程设计一、课程目标知识目标:1. 了解内燃机的基本结构、工作原理及其在交通工具中的应用。
2. 掌握内燃机的四个冲程(进气、压缩、做功、排气)及其能量转换过程。
3. 理解内燃机的热效率、功率等性能指标,并学会如何提高内燃机的效率。
技能目标:1. 能够运用所学的内燃机知识,分析实际内燃机运行中可能存在的问题,并提出改进措施。
2. 学会使用简单工具进行内燃机的拆装和组装,提高动手实践能力。
3. 能够运用数学和物理知识,对内燃机的性能进行初步计算和评估。
情感态度价值观目标:1. 培养学生对内燃机及相关技术的兴趣,激发创新意识,增强探索精神。
2. 增强学生的环保意识,认识到内燃机排放对环境的影响,关注新能源技术的发展。
3. 培养学生团队合作意识,学会在团队中发挥个人作用,共同完成任务。
课程性质:本课程为初中物理学科的教学内容,侧重于内燃机的基础知识和实践技能的传授。
学生特点:初中生具有较强的求知欲和好奇心,动手实践能力逐渐提高,但理论知识掌握程度有限。
教学要求:结合学生特点,注重理论与实践相结合,充分调动学生的积极性,提高学生的内燃机知识水平和实践能力。
在教学过程中,关注学生的学习进度,及时调整教学策略,确保课程目标的实现。
通过有效的教学设计和评估,帮助学生将课程目标分解为具体的学习成果。
二、教学内容1. 内燃机概述- 内燃机的定义、类型及应用- 内燃机的发展简史2. 内燃机的结构与工作原理- 内燃机的四个冲程:进气、压缩、做功、排气- 内燃机的关键部件:气缸、活塞、连杆、曲轴、配气机构等- 内燃机的能量转换过程3. 内燃机的性能指标- 热效率、功率、扭矩等基本概念- 影响内燃机性能的因素- 提高内燃机性能的方法4. 内燃机的实际应用- 内燃机在交通工具中的应用案例- 内燃机在非交通工具领域的应用5. 内燃机的环保问题及新能源技术- 内燃机排放污染物的种类及危害- 环保内燃机技术及新能源技术简介6. 内燃机的拆装与组装实践- 内燃机的拆装与组装步骤- 安全操作规程及注意事项教学内容安排与进度:第1-2周:内燃机概述、结构与工作原理第3-4周:内燃机的性能指标、实际应用第5-6周:内燃机的环保问题及新能源技术第7-8周:内燃机的拆装与组装实践教学内容与课本关联性:教学内容紧密结合课本,按照教材章节顺序进行教学,确保学生能够系统地掌握内燃机相关知识。
内燃机原理教学设计引言内燃机是机械专业必修的基础课程之一,掌握内燃机的原理和工作方式对于机械专业的同学来说至关重要。
本文将从教学目标、内容、方法和评估四个方面,设计一节内燃机原理的教学课程。
教学目标本节课程的主要教学目标如下:1.理解内燃机的基本概念和组成部分;2.了解内燃机的工作原理和工作循环;3.熟悉内燃机的分类和特点;4.掌握内燃机的性能参数计算方法;5.熟练掌握内燃机的故障诊断和维修方法。
教学内容第一部分:内燃机基础知识1.内燃机的基本概念和组成部分;2.内燃机的工作原理和工作循环;3.内燃机的分类和特点。
第二部分:内燃机性能参数计算1.内燃机的热力循环过程;2.内燃机的性能参数计算方法;3.内燃机的优化设计原则。
第三部分:内燃机维修与故障诊断1.内燃机的故障分类和诊断方法;2.内燃机的维护和保养方法;3.内燃机故障的排查和排除方法。
教学方法本节课程将采用多种教学方法,包括讲授、实验演示和案例分析等。
讲授在教学讲义中,详细介绍内燃机的基础知识、性能参数计算和故障维修等内容。
实验演示通过实验演示,让学生亲身体验内燃机的工作原理和计算方法。
实验设备包括内燃机实验台、热力循环实验仪和排放测试仪等。
案例分析通过案例分析,让学生学会应用所学知识解决实际问题。
案例包括内燃机的优化设计、故障排查、排放控制等。
教学评估教学评估主要采用考试评估和实验评估两种方式。
考试评估考试内容包括选择题、填空题和计算题等,旨在考察学生对内燃机的基础知识、性能参数计算和故障维修等方面的掌握程度。
实验评估实验评估主要考察学生在实验过程中的操作技能和实验报告撰写能力。
评估内容包括实验操作过程、实验结果记录和实验报告撰写等方面。
结论通过本节课程的教学设计,学生将能够全面了解内燃机的基础知识、性能参数计算和故障维修等方面,提高实践能力和解决实际问题的能力。
同时,教学评估也将为教师提供有效的教学反馈和课程改进建议。
内燃机设计课程设计一、课程目标知识目标:1. 理解内燃机的基本结构和工作原理;2. 掌握内燃机设计的基本要求和关键技术;3. 了解内燃机发展历程及未来发展趋势;4. 掌握内燃机性能评价的主要指标。
技能目标:1. 能够运用所学知识进行内燃机设计方案的分析与比较;2. 能够独立完成内燃机主要部件的设计与计算;3. 能够运用CAD软件进行内燃机零部件的绘制;4. 能够撰写内燃机设计报告并进行展示。
情感态度价值观目标:1. 培养学生对内燃机设计及制造工艺的热爱,增强职业素养;2. 培养学生团队协作精神,提高沟通与表达能力;3. 增强学生环保意识,关注内燃机排放及能源问题;4. 激发学生创新意识,培养敢于挑战、勇攀科技高峰的精神。
课程性质分析:本课程为高年级专业课,要求学生具备一定的机械基础知识和工程实践能力。
学生特点分析:学生具备一定的自主学习能力和团队合作意识,对内燃机设计有一定了解,但实践能力有待提高。
教学要求:结合课程特点和学生实际,注重理论与实践相结合,提高学生的动手能力和创新能力。
通过课程学习,使学生能够达到上述具体的学习成果。
二、教学内容1. 内燃机基本原理:讲解内燃机的四大冲程、燃烧过程、能量转换等基本原理,对应教材第一章内容。
2. 内燃机结构设计:介绍内燃机主要部件的结构设计,包括气缸、活塞、连杆、曲轴、配气机构等,对应教材第二章内容。
3. 内燃机性能评价:分析内燃机的性能指标,如功率、扭矩、燃油消耗率等,以及影响性能的因素,对应教材第三章内容。
4. 内燃机设计方法:讲解内燃机设计的基本流程、设计方法和设计规范,对应教材第四章内容。
5. 内燃机零部件设计与计算:深入探讨内燃机主要零部件的设计与计算方法,包括强度计算、刚度计算等,对应教材第五章内容。
6. 内燃机CAD软件应用:教授CAD软件在内燃机设计中的应用,如二维绘图、三维建模、装配体设计等,对应教材第六章内容。
7. 内燃机设计实例分析:分析典型内燃机设计案例,使学生掌握实际设计过程中的关键技术,对应教材第七章内容。
机械原理课程设计单缸一、教学目标本节课的教学目标是让学生了解和掌握单缸内燃机的工作原理和基本结构,培养学生运用机械原理分析和解决实际问题的能力。
具体目标如下:1.知识目标:使学生了解单缸内燃机的构造、工作原理及其在实际中的应用;掌握内燃机的四冲程、能量转换和效率计算等基本知识。
2.技能目标:培养学生运用所学知识分析、解决实际问题的能力;能够绘制简单的单缸内燃机结构图,并进行简要的性能分析。
3.情感态度价值观目标:激发学生对机械原理和内燃机的兴趣,培养学生的创新精神和团队合作意识,使学生在学习过程中体验到科技改变生活的魅力。
二、教学内容本节课的教学内容主要包括以下几个部分:1.单缸内燃机的结构与工作原理:介绍内燃机的四大组成部分——气缸、活塞、曲轴和飞轮,以及四冲程的作用和顺序。
2.内燃机的能量转换与效率计算:讲解内燃机在工作过程中能量的转换和损失,以及热机效率的计算方法。
3.单缸内燃机在实际中的应用:通过实例分析,使学生了解单缸内燃机在汽车、柴油机等领域的应用。
4.绘制单缸内燃机结构图:培养学生动手能力,让学生独立或合作绘制单缸内燃机结构图,并进行简要的性能分析。
三、教学方法为了提高教学效果,本节课将采用以下几种教学方法:1.讲授法:教师讲解内燃机的结构、工作原理、能量转换和效率计算等基本知识。
2.案例分析法:通过分析实际应用案例,使学生了解单缸内燃机在现实生活中的重要作用。
3.实验法:学生进行内燃机模型实验,使学生直观地感受内燃机的工作过程。
4.讨论法:鼓励学生在课堂上提问、发表见解,培养学生的团队合作精神和批判性思维。
四、教学资源为了支持本节课的教学,我们将准备以下教学资源:1.教材:选用符合课程标准的教材,为学生提供系统、科学的学习材料。
2.参考书:提供相关的参考书籍,丰富学生的知识储备。
3.多媒体资料:制作精美的PPT、视频等多媒体资料,提高学生的学习兴趣。
4.实验设备:准备内燃机模型、实验器材等,为学生提供实践操作的机会。
机械原理课程设计说明书题目:单缸四冲程内燃机机构设计及其运动分析二级学院机械工程学院年级专业13材料本科班学号学生姓名指导教师朱双霞教师职称教授目录第一部分绪论 (2)第二部分设计题目及主要技术参数说明 (3)2、1 设计题目及机构示意图 (3)2、2 机构简介 (3)2、3 设计数据…………………………………………………… 4第三部分设计内容及方案分析…………………………………… 63、1 曲柄滑块机构设计及其运动分析…………………………63、1、1 设计曲柄滑块机构……………………………………… 63、1、2 曲柄滑块机构得运动分析……………………………… 73、2 齿轮机构得设计……………………………………………113、2、1 齿轮传动类型得选择……………………………………123、2、2 齿轮传动主要参数及几何尺寸得计算…………………133、3 凸轮机构得设计 (13)3、3、1 从动件位移曲线得绘制 (14)3、3、2 凸轮机构基本尺寸得确定………………………………153、3、3 凸轮轮廓曲线得设计 (1)6第四部分设计总结 (18)第五部分参考文献 (20)第六部分图纸 (2)1第一部分绪论1、本课程设计主要内容就是单缸四冲程内燃机机构设计及其运动分析,在设计计算中运用到了《机械原理》、《理论力学》、《机械制图》、《高等数学》等多门课程知识。
2、内燃机就是一种动力机械,它就是通过使燃料在机器内部燃烧,并将其放出得热能直接转换为动力得热力发动机。
通常所说得内燃机就是指活塞式内燃机。
活塞式内燃机以往复活塞式最为普遍。
活塞式内燃机将燃料与空气混合,在其气缸内燃烧,释放出得热能就是气缸内产生高温高压得燃气。
燃气膨胀推动活塞做功。
再通过曲柄连杆机构或其她机构将机械功输出,驱动从动机械工作。
内燃机得工作循环由进气、压缩、燃烧与膨胀、排气等过程组成。
这些过程中只有膨胀过程就是对外做功得过程。
其她过程都就是为更好得实现做功过程而需要得过程。
内燃机原理课程设计简介内燃机是一种将燃料与空气混合后在气缸内燃烧产生高温高压气体,利用其能量向外部做功的能量转换装置。
内燃机是现代交通工具和机械制造等领域中不可或缺的动力来源。
本次课程设计将深入学习内燃机的工作原理,设计一款自己的简易内燃机,并利用3D打印进行制作。
学习内容1. 内燃机的分类内燃机按工作循环类型不同,可以分为两类:往复式内燃机和旋转式内燃机。
其中,往复式内燃机包括四冲程汽油机和柴油机,旋转式内燃机包括涡轮喷气发动机和涡轮螺旋桨发动机。
2. 内燃机的工作原理(1)四冲程汽油机原理四冲程汽油机包括四个冲程:进气、压缩、燃烧和排气,是一种常见的汽车引擎类型。
进气冲程中,汽缸内的活塞由上往下移动,吸入燃油和空气混合物;压缩冲程中,活塞向上移动,将混合物压缩至较小体积;燃烧冲程中,火花塞产生火花,引燃混合物,产生高温高压气体,推动活塞向下运动;排气冲程中,活塞再次向上移动,以排出废气。
(2)柴油机原理柴油机是利用柴油燃料进行燃烧的内燃机,其工作原理与汽油机类似,但压缩比更高,通过高温高压气体将燃油喷入气缸,实现点燃燃料的过程。
柴油机的燃油效率和经济性较高,常用于大型工业用途。
3. 内燃机的设计与制作根据学习所得的内燃机原理知识,我们将设计一款简易的内燃机,并利用3D 打印进行制作。
设计过程中需要考虑内燃机结构、燃料选择、点火系统等问题,并对设计方案进行实验验证,检验内燃机的功率和效率。
实验过程1. 设计内燃机根据上述内燃机原理,设计一款自己的内燃机,并绘制出其制图。
在设计过程中要考虑燃烧室、进气和排气系统、点火系统、气缸体等部件的设计。
2. 制作3D模型利用设计图纸进行3D模型制作,使用3D打印技术进行制造。
3. 进行实验验证将制造出的内燃机连接有功率分析仪和扭矩计,对其性能进行测试,检验其功率和效率。
根据测试结果进行数据分析和结论得出。
结论在本次课程设计中,我们深入学习了内燃机的工作原理和分类,并设计了一款自己的内燃机并进行了3D打印制作。
大学内燃机课程设计一、课程目标知识目标:1. 学生能掌握内燃机的基本结构、工作原理及性能评价指标,理解内燃机的发展历程和未来趋势。
2. 学生能了解内燃机的燃烧过程、传热过程和排放污染物形成机制,掌握内燃机排放控制技术。
技能目标:1. 学生具备运用所学知识对内燃机故障进行诊断与排除的能力,提高实际操作技能。
2. 学生能够运用内燃机性能计算方法,对内燃机性能进行优化,提高燃油经济性和动力性能。
情感态度价值观目标:1. 学生通过学习内燃机课程,培养对机械工程领域的兴趣和热情,增强对内燃机行业的责任感。
2. 学生能够树立节能、环保意识,关注内燃机排放问题,积极参与内燃机的技术创新和改进。
课程性质:本课程为专业核心课程,旨在培养学生具备扎实的内燃机理论基础,提高实际工程应用能力。
学生特点:大学本科二年级学生,已具备一定的机械工程基础知识,对内燃机有一定了解,但缺乏深入的理论和实践经验。
教学要求:结合学生特点和课程性质,注重理论与实践相结合,充分调动学生的主观能动性,提高学生的动手能力和创新能力。
通过本课程的学习,使学生具备内燃机领域的基本知识和技能,为后续相关课程的学习和工程实践打下坚实基础。
二、教学内容1. 内燃机的基本结构及工作原理:包括内燃机的类型、构造、工作循环、燃烧过程等,参考教材第一章内容。
2. 内燃机性能评价与优化:介绍内燃机的性能指标、性能计算方法,探讨性能优化策略,结合教材第二章内容。
3. 内燃机的燃烧与传热过程:分析燃烧室内的燃烧现象、传热规律,涉及教材第三章内容。
4. 内燃机排放污染物与控制技术:讲解排放污染物的形成机制、影响因素及控制技术,参考教材第四章内容。
5. 内燃机故障诊断与维修:介绍内燃机常见故障类型、诊断方法以及维修技术,结合教材第五章内容。
6. 内燃机的节能与环保技术:探讨内燃机的节能措施、环保技术及其发展趋势,涉及教材第六章内容。
教学进度安排:1. 第1-2周:内燃机的基本结构及工作原理2. 第3-4周:内燃机性能评价与优化3. 第5-6周:内燃机的燃烧与传热过程4. 第7-8周:内燃机排放污染物与控制技术5. 第9-10周:内燃机故障诊断与维修6. 第11-12周:内燃机的节能与环保技术教学内容确保科学性和系统性,结合教材章节组织教学,注重理论与实践相结合,提高学生的内燃机领域专业素养。
内燃机机构课程设计一、课程目标知识目标:1. 学生能理解内燃机的类型、工作原理及主要组成部分,掌握内燃机的热力学基本概念。
2. 学生能描述内燃机的吸气、压缩、做功和排气四个冲程的过程及其作用。
3. 学生了解内燃机的燃油供给系统、点火系统和冷却系统等主要辅助系统的功能。
技能目标:1. 学生能够通过模型或实物操作,掌握内燃机的组装和拆卸技巧。
2. 学生能够运用所学的知识,分析内燃机性能参数,进行简单的故障判断。
3. 学生能够设计简单的内燃机实验,收集和分析数据,得出合理的结论。
情感态度价值观目标:1. 培养学生对内燃机及机械工程领域的兴趣,激发学生探究精神和创新意识。
2. 增强学生的环保意识,认识到内燃机在环境保护和能源利用方面的重要性。
3. 培养学生团队合作精神,学会在小组讨论和实践中相互尊重、支持和学习。
课程性质:本课程为工程技术类课程,以理论教学和实践操作相结合的方式进行。
学生特点:学生为八年级学生,具备一定的物理知识和动手能力,对新鲜事物充满好奇心。
教学要求:结合学生特点,注重理论与实践相结合,充分调动学生的主观能动性,培养其独立思考和解决问题的能力。
通过分解课程目标为具体的学习成果,使学生在掌握知识的同时,提升技能和情感态度价值观。
二、教学内容1. 内燃机的类型及工作原理:介绍汽油机、柴油机等常见内燃机的特点,讲解内燃机的四个冲程及其工作原理。
教材章节:第一章 内燃机概述。
2. 内燃机的组成与结构:详细讲解内燃机的各个组成部分,如气缸、活塞、曲轴、连杆等,并分析其作用。
教材章节:第二章 内燃机的结构。
3. 内燃机的辅助系统:介绍燃油供给系统、点火系统、冷却系统等辅助系统的作用和原理。
教材章节:第三章 内燃机的辅助系统。
4. 内燃机的组装与拆卸:指导学生进行内燃机的组装和拆卸实践,掌握相关技巧。
教材章节:第四章 内燃机的组装与拆卸。
5. 内燃机的性能参数与故障判断:分析内燃机的功率、燃油消耗率等性能参数,学习简单的故障判断方法。
机械原理内燃机课程设计机械原理内燃机课程设计涵盖了内燃机的工作原理、结构、性能、操作、维护等方面的知识。
以下是一个可能的课程设计方案:一、课程目标通过本课程的学习,学生将会:1.了解内燃机的分类、结构、工作原理以及性能特点等基本知识;2.掌握内燃机的操作技能、调试方法和常见故障处理;3.了解内燃机的维护保养知识。
二、教学内容1.内燃机概论内燃机分类、基本概念、工作原理、历史发展和现状等。
2.内燃机结构及其工作原理包括四冲程、两冲程、柴油机等内燃机的结构特点,工作过程及其特点、阶段性燃烧过程等。
3.内燃机性能参数及其评价标准相关的性能参数包括功率、转速、燃料消耗率、排放量等,评价标准包括质量指标、效率指标、经济指标等。
4.内燃机操作技能负载调节、启动及停机、调速、负荷兑现、操作注意事项等。
5.内燃机调试方法及常见故障处理对内燃机进行调试以保证正常运转,包括调整点火时间、混合气比例、减震、吸气道和排气道等,并对常见故障进行诊断和处理。
6.内燃机维护保养讲解内燃机日常保养方法、所需的工具和设备、保养周期、维修操作流程等。
三、教学方法概念性学习、实践操作和案例学习相结合。
四、实验设计1.安装内燃机,燃油加注、点火、运转和调节。
2.对内燃机某一部件进行拆装,在拆装过程中发现问题,进行诊断并使用相应的工具进行修复。
3.对内燃机进行故障排除,并制定适当的维修方案。
五、实验要求1.对实验室安全规定进行理解和遵守;2.认真掌握每个实验的操作流程,做好实验记录;3.协同合作,认真同时实验。
六、实践环节到相关企业、工厂、维修站实际进行内燃机的检测、维修和保养,从而加深对内燃机的认识和了解。
七、考核方式实验成绩、个人实验报告、期中阶段测试、期末考试等综合评定。
内燃机学教案模板(共4篇)第1篇:内燃机教案内燃机教学案学习目标1.了解汽油机的基本构造和工作原理。
重点、难点内燃机的构造和工作原理;汽油机和柴油机的区别和联系.教学过程一、新课引入:什么是热机?1.回答下列能量转化:给自行车打气时,打气筒的筒壁会发热:。
二、新课知识:内燃机:燃料在气缸内燃烧的热机。
最常见的内燃机,以汽油或柴油为燃料,叫做汽油机和柴油机工作循环:内燃机的工作过程以一个循环为一个单位,一个循环又分为四个冲程。
3、能的转化考虑:汽车在开动前,是如何使内燃机起动的?常识:方法一,用手“摇车”;方法二,接通电源,开动“马达”。
4、总结内燃机在一个工作循环中,有两个冲程有能量转化,压缩冲程和做功冲程,但只有做功冲程是内能随堂练习一、填空题1.内燃机工作时,燃料在气缸内燃烧,生成燃气,燃气推动活塞,能转化为能.所以说,内燃机就是利用内能来的机器。
2.改变物体的内能的方式有两种。
饮料第2篇:内燃机(教案)第三节内燃机教学目的:1.了解四冲程内燃机的构造和工作原理及.2.了解四冲程内燃机工作过程中能量的转化.教具:四冲程汽油机和柴油机的示教模型.重点、难点:重点:汽油机的工作过程.难点:汽油机和柴油机的做功冲程.教学过程:(一)引入新课引导学生叙述交通工具中燃料的燃烧都在气缸内进行,从而获得更大的动力.热机的种类很多,燃料在气缸内燃烧的热机叫内燃机.(二)进行新课1.内燃机和种类汽油机和柴油机.(1)汽油机:用汽油做燃料的内燃机.①构造结合模型向学生介绍汽油机的基本构造,介绍各构造名称的同时介绍其功能,同时根据教材第33页图3-6向学生介绍汽油机的四个冲程,并强调这四个冲程周而复始,不断循环下去,汽油机就可以连续不断地对外做功.②工作原理结合模型讲解工作原理,为加深学生的理解,在讲解过程中设置以下问题: a.吸气冲程燃气为什么会进人气缸?b.猜测压缩冲程产生什么结果?能量如何转化?c.做功冲程中燃气为什么能做功?能量转化如何?d.排气冲程有什么作用?通过教师引导,学生讨论得出:吸气冲程活塞下行,气缸内气体的体积增大,压强减小,大气压将混合燃料(或空气)压进气缸.压缩冲程将燃气压缩,同时温度升高,机械能转化为内能.做功冲程燃料燃烧产生高温高压的燃气,内能大大增加,因此能推动活塞做功,内能转化为机械能.排气冲程将废气排出后,开始新的吸气冲程.排气冲程排出的废气温度比较高,损耗一部分内能.四个冲程中只有做功冲程是燃气对活塞做功.(2)柴油机:用柴油作燃料的内然机.学生阅读教材并对比汽油机,将两者的主要构造和四个冲程加以比较,总结得出两者构造和工作过程的异同。
内燃机课程设计1. 引言内燃机是一种将化学能转换为机械能的热力机械装置。
它是现代工业生产和交通运输中最常用的动力装置之一。
内燃机课程设计旨在通过对内燃机的原理、结构和工作过程进行深入学习,培养学生的分析问题和解决问题的能力,提高其工程实践能力。
本文将围绕内燃机课程设计展开,介绍内燃机的基本原理、结构与分类、工作过程及其应用领域,并对课程设计的实施步骤和内容进行详细阐述。
2. 内燃机基本原理内燃机是利用可燃气体在密闭容器中的爆发压力推动活塞或转子运动,从而将化学能转换为机械能的装置。
其基本原理包括四个步骤:进气、压缩、爆发和排气。
•进气:进气阀打开,活塞向下运动,使气缸内形成负压,外部空气被吸入。
•压缩:进气阀关闭,活塞向上运动,将吸入的空气压缩至高压状态。
•爆发:喷油器喷入燃油,火花塞点火,燃油燃烧产生高温高压气体,推动活塞向下运动。
•排气:排气阀打开,活塞向上运动,将燃烧后的废气排出。
3. 内燃机结构与分类内燃机按工作循环可分为两类:四冲程内燃机和两冲程内燃机。
四冲程内燃机包括进气冲程、压缩冲程、爆发冲程和排气冲程。
它的结构包括气缸、活塞、曲轴连杆机构、进气阀和排气阀等部件。
两冲程内燃机只有进气冲程和工作冲程,可以通过进口和出口的开关控制进出气体。
其结构相对简单,常用于小型设备或特定领域。
4. 内燃机工作过程内燃机的工作过程可以分为四个阶段:吸入、压缩、爆发和排出。
•吸入阶段:活塞向下运动,气缸内形成负压,进气阀打开,外部空气被吸入。
•压缩阶段:进气阀关闭,活塞向上运动,将空气压缩至高压状态。
•爆发阶段:喷油器喷入燃油,火花塞点火,燃油燃烧产生高温高压气体,推动活塞向下运动。
•排出阶段:排气阀打开,活塞向上运动,将燃烧后的废气排出。
5. 内燃机的应用领域内燃机广泛应用于交通运输、工业生产和农业等领域。
在交通运输领域,汽车、摩托车、船舶和飞机等都使用内燃机作为动力装置。
内燃机具有功率大、体积小、重量轻和启动方便等优点,在交通工具中得到了广泛应用。
内燃机设计课程设计一、课程目标知识目标:1. 理解内燃机的基本工作原理,掌握内燃机的构造及其各部件功能。
2. 掌握内燃机设计的基本原则,了解内燃机设计过程中的关键参数和影响因素。
3. 了解内燃机技术的发展趋势,认识新型内燃机的创新点。
技能目标:1. 能够运用所学知识,进行内燃机部件的拆装和组装,提高动手实践能力。
2. 能够运用CAD软件进行内燃机零部件的设计,培养计算机辅助设计能力。
3. 能够分析内燃机设计中的问题,并提出合理的解决方案,提高问题解决能力。
情感态度价值观目标:1. 培养学生对内燃机设计课程的兴趣,激发学习热情,形成积极的学习态度。
2. 增强学生的团队合作意识,培养沟通协调能力,提高集体荣誉感。
3. 培养学生关注环保,了解内燃机排放标准,提高社会责任感和使命感。
课程性质:本课程为高年级工程技术类专业课程,具有较强的理论性和实践性。
学生特点:学生具备一定的机械基础和工程实践能力,对内燃机设计有一定了解,但缺乏系统性和深入性的认识。
教学要求:结合课程性质和学生特点,注重理论与实践相结合,充分调动学生的主观能动性,提高学生的内燃机设计能力和创新能力。
通过课程目标的具体分解,为后续教学设计和评估提供明确依据。
二、教学内容1. 内燃机工作原理及构造- 理论教学:内燃机的四冲程工作原理、内燃机的类型及构造。
- 实践教学:内燃机实物拆装,观察各部件结构及功能。
2. 内燃机设计原则与关键参数- 理论教学:内燃机设计的基本原则、设计过程中的关键参数。
- 实践教学:运用CAD软件进行内燃机零部件初步设计。
3. 内燃机设计案例分析- 理论教学:分析典型内燃机设计案例,了解设计过程中的问题及解决方法。
- 实践教学:分组进行内燃机设计,讨论并解决设计过程中遇到的问题。
4. 内燃机技术发展趋势与创新- 理论教学:内燃机技术的发展趋势、新型内燃机的创新点。
- 实践教学:参观内燃机生产企业,了解新型内燃机的研发与应用。
机械原理课程设计说明书题目:单缸四冲程内燃机机构设计及其运动阐发二级学院机械工程学院年级专业13资料本科班学号学生姓名指导教师朱双霞教师职称教授目录第一部分绪论 (2)第二部分设计题目及主要技术参数说明 (3)2.1 设计题目及机构示意图 (3)2.2 机构简介 (3)2.3 设计数据 (4)第三部分设计内容及计划阐发 (6)3.1 曲柄滑块机构设计及其运动阐发 (6)3.1.1 设计曲柄滑块机构 (6)3.1.2 曲柄滑块机构的运动阐发 (7)3.2 齿轮机构的设计 (11)3.2.1 齿轮传动类型的选择 (12)3.2.2 齿轮传动主要参数及几何尺寸的计算 (13)3.3 凸轮机构的设计 (13)3.3.1 从动件位移曲线的绘制 (14)3.3.2 凸轮机构基本尺寸简直定 (15)3.3.3 凸轮轮廓曲线的设计 (16)第四部分设计总结 (18)第五部分参考文献 (20)第六部分图纸 (21)第一部分绪论1.本课程设计主要内容是单缸四冲程内燃机机构设计及其运动阐发,在设计计算中运用到了《机械原理》、《理论力学》、《机械制图》、《高等数学》等多门课程知识。
2. 内燃机是一种动力机械,它是通过使燃料在机器内部燃烧,并将其放出的热能直接转换为动力的热力发念头。
通常所说的内燃机是指活塞式内燃机。
活塞式内燃机以往复活塞式最为普遍。
活塞式内燃机将燃料和空气混合,在其气缸内燃烧,释放出的热能是气缸内产生高温高压的燃气。
燃气膨胀推动活塞做功。
再通过曲柄连杆机构或其他机构将机械功输出,驱动从念头械工作。
内燃机的工作循环由进气、压缩、燃烧和膨胀、排气等过程组成。
这些过程中只有膨胀过程是对外做功的过程。
其他过程都是为更好的实现做功过程而需要的过程。
四冲程是指在进气、压缩、膨胀和排气四个行程内完成一个工作循环,其间曲轴旋转两圈。
进气行程时,此时进气门开启,排气门关闭;压缩行程时,气缸、内气体受到压缩,压力增高,温度上升;膨胀行程是在压缩上止点前喷油或燃烧,使混合气燃烧,产生高温、高压,推动活塞下行并做功;排气行程时,活塞推挤气缸内废气经排气门排出。
电算的源程序(MATLAB)1.滑块的位移源程序x1=0:0.05:4*pi; %x1--原动件的角度变量b=150; %b--原动件的长度c=200; %c--连杆的长度k=b/c;l=150*cos(x1)+sqrt(200^2-(150*sin(x1).^2)) %l--连杆的位移plot(x1,l);title('滑块的位移图像')xlabel('\it角度','FontSize',8)ylabel('位移大小','FontSize',8)2.滑块的速度源程序x1=0:0.05:4*pi; %x1--原动件的角度变量b=150; %b--原动件的长度c=200; %c--连杆的长度k=b/c;w=(2*pi*650)/60; %w--原动件的角速度x2=asin(-k*sin(x1)); %x2--连杆的角度v=b*w*sin(x1-x2)./cos(x2);plot(x1,v);title('滑块的速度图像')xlabel('\it角度','FontSize',8)ylabel('速度大小','FontSize',8)3.滑块的加速度源程序:x1=0:0.05:4*pi; %x1--原动件的角度变量b=150; %b--原动件的长度c=200; %c--连杆的长度k=b/c;w=(2*pi*650)/60; %w--原动件的角速度x2=asin(-k*sin(x1)); %x2--连杆的角度a=b*(w^2)*(cos(x1-x2)./cos(x2)+k*cos(x1).^2./cos(x2).^3); plot(x1,a);title('滑块的加速度图像')xlabel('\it角度','FontSize',8)ylabel('加速度大小','FontSize',8)4.从动件滚子的位移源程序:e=5; %凸轮的偏心距r=35; %凸轮的基圆半径u=0:0.001:360;s0=sqrt(r^2-e^2);s1=(4*(1-cos(pi*u/50))).*(0<=u & u<50); %凸轮推程运动阶段s2=8.*(u>=50&u<55); %远休止阶段s3=4*(1+cos(pi*(u-55)/50)).*(u>=55&u<105); %凸轮回程阶段s4=0.*(u>=105&u<=360); %近休止阶段s=s1+s2+s3+s4;plot(u,s);axis([0,360,0,15]);title('滚子的运动线图');xlabel('角度');ylabel('位移');5.凸轮的轮廓线源程序:e=5; %凸轮的偏心距r=35; %凸轮的基圆半径r1=5; %滚子的半径s0=sqrt(r^2-e^2); %区间分段x1=50;x2=55;x3=105;x4=360;w=pi*650/60; %凸轮的角速度u=0:0.05:360;s1=(4*(1-cos(pi*u/50))).*(0<=u & u<x1); %凸轮推程运动阶段v1=pi*8.*sin(pi*u/50).*(0<=u & u<x1);dx1=((v1-e).*sin(u*pi/180)+(s0+s1).*cos(u*pi/180)).*(0<=u & u<x1);dy1=((v1-e).*cos(u*pi/180)-(s0+s1).*sin(u*pi/180)).*(0<=u & u<x1);X1=((s0+s1).*sin(u*pi/180)+e*cos(u*pi/180)).*(0<=u &u<x1);Y1=((s0+s1).*cos(u*pi/180)-e*sin(u*pi/180)).*(0<=u &u<x1);XS1=X1-r1*dy1./sqrt(dx1.^2+dy1.^2);YS1=Y1+r1*dx1./sqrt(dx1.^2+dy1.^2);s2=8; %远休止阶段v2=0;dx2=((v2-e).*sin(u*pi/180)+(s0+s2).*cos(u*pi/180)).*(x1<= u & u<x2);dy2=((v2-e).*cos(u*pi/180)-(s0+s2).*sin(u*pi/180)).*(x1<= u & u<x2);X2=((s0+s2)*sin(u*pi/180)+e.*cos(u*pi/180)).*(x1<=u &u<x2);Y2=((s0+s2)*cos(u*pi/180)-e.*sin(u*pi/180)).*(x1<=u &u<x2);XS2=X2-r1*dy2./sqrt(dx2.^2+dy2.^2);YS2=Y2+r1*dx2./sqrt(dx2.^2+dy2.^2);s3=4*(1+cos(pi*(u-x2)/50)).*(x2<=u&u<x3); %凸轮回程阶段v3=-pi*8.*sin(pi*(u-x2)/50).*(x2<=u&u<x3);dx3=((v3-e).*sin(u*pi/180)+(s0+s3).*cos(u*pi/180)).*(x2<= u&u<x3);dy3=((v3-e).*cos(u*pi/180)-(s0+s3).*sin(u*pi/180)).*(x2<= u&u<x3);X3=((s0+s3).*sin(u*pi/180)+e.*cos(u*pi/180)).*(x2<=u&u<x3 );Y3=((s0+s3).*cos(u*pi/180)-e.*sin(u*pi/180)).*(x2<=u&u<x3 );XS3=X3-r1*dy3./sqrt(dx3.^2+dy3.^2);YS3=Y3+r1*dx3./sqrt(dx3.^2+dy3.^2);%近休止阶段v4=0;s4=0;dx4=((v4-e).*sin(u*pi/180)+(s0+s4).*cos(u*pi/180)).*(x3<= u&u<x4);dy4=((v4-e).*cos(u*pi/180)-(s0+s4).*sin(u*pi/180)).*(x3<= u&u<x4);X4=(s0*sin(u*pi/180)+e.*cos(u*pi/180)).*(x3<=u & u<=x4); Y4=(s0*cos(u*pi/180)-e.*sin(u*pi/180)).*(x3<=u & u<=x4);XS4=X4-r1*dy4./sqrt(dx4.^2+dy4.^2);YS4=Y4+r1*dx4./sqrt(dx4.^2+dy4.^2);X=X1+X2+X3+X4; %合并分段函数Y=Y1+Y2+Y3+Y4;plot(X,Y,'--',XS1,YS1,'r',XS2,YS2,'r',XS3,YS3,'r',XS4,YS4 ,'r');title('凸轮理论轮廓线和实际轮廓线的比较');xlabel('X');ylabel('Y');6.凸轮的理论轮廓线的部分数据:X 5 8.017 11.072 14.222 17.492 20.862 24.26927.608 30.748 33.549 35.879 37.797 39.25940.067 40.230 39.812 38.922 37.698 36.29034.834 33.439 32.167 30.842 29.282 27.50025.508 23.323 20.959 18.437 15.774 12.99010.108 7.149 4.136 1.091 -1.962 -5.000 -8.000-10.939 -13.795 -16.546 -19.171 -21.651 -23.965-26.097 -28.030 -29.750 -31.244 -32.500 -33.509-34.262 -34.755 -34.983 -34.945 -34.641 -34.073-33.247 -32.167 -30.842 -29.282 -27.500 -25.508-23.323 -20.959 -18.437 -15.774 -12.990 -10.108-7.149 -4.136 -1.091 1.962 5.000Y34.641 34.268 33.999 33.759 33.439 32.90832.035 30.711 28.866 26.478 23.579 20.36216.892 13.166 9.322 5.491 1.786 -1.721 -5.000-8.067 -10.973 -13.795 -16.546 -19.171 -21.651-23.965 -26.097 -28.030 -29.750 -31.244 -32.500-33.509 -34.262 -34.755 -34.983 -34.945 -34.641-34.073 -33.247 -32.167 -30.842 -29.282 -27.500-25.508 -23.323 -20.959 -18.437 -15.774 -12.990-10.108 -7.149 -4.136 -1.091 1.962 5.000 8.00010.939 13.795 16.546 19.171 21.651 23.96526.097 28.030 29.750 31.244 32.500 33.50934.262 34.755 34.983 34.945 34.6417.凸轮实际轮廓线的数据(略)。