第六章 步进电机驱动与控制
i1
导通时,电压平衡方程为:
U/RL
U
i1 R L
L d i1 dt
E
假 设 电 机 堵 转 , E 0, 解 方 程 得 :
t
i1
U RL
t
(1 e )
顺时针转,步距角0.75 º,送电方式应为:(
)
逆时针转,步距角0.75 º,送电方式应为:(
)
顺时针转,步距角1.5 º,送电方式应为:
(
)或(
)
6.1.5 步进电机的主要性能目的
思索题: 三相反响式步进电机,采用三相六拍任务方式,转 子有40个齿,脉冲频率为600Hz,求
写出一个循环的通电顺序 求步距角 求步进电机的转速rpm
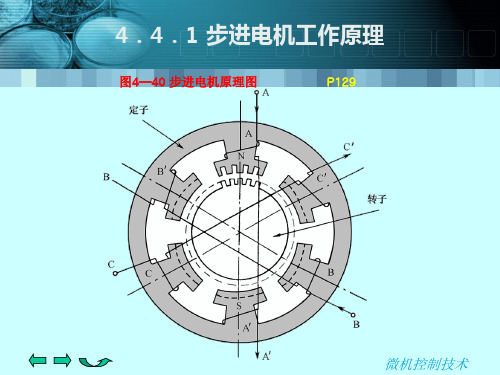
abcd转子每次向顺时针方向旋转90612pm型步进电机工作原理612pm型步进电机工作原理定子磁场对转子的作用力分为?与转子轴线垂直的?与转子轴线平行的如果转子转动一圈产生的磁场力矩cos是转子轴线与定子磁场水平线的夹角用图描绘将是一条磁场力矩和转子位置的正弦曲线sin失调角电磁转矩稳定区域平衡点613转子位置与转矩的关系614电机的特点及分类特点位置误差不会积累位移与输入的脉冲数量成正比具有一定精度的开环系统具有一定的自锁功能614电机的特点及分类抗干扰能力强即在负载能力范围内转角和转速不受电压大小负载波动的影响也不受环境温度冲击振动的影响仅与频率脉若用同一频率的脉冲电源控制几台步进电机可以实现多个电机的同步思考题
6.1.6 步进电机的静态特性
6.1.6 步进电机的静态特性-------矩角特性曲线
电磁转矩
平衡点
静态矩角特性曲线
失调角
一、 稳定平衡区和稳定平衡点
稳定区域