4章 船舶稳性(课堂PPT)
- 格式:ppt
- 大小:4.56 MB
- 文档页数:92
第四章船舶稳性第一节船舶稳性的基本概念(一)船舶平衡的3种状态1、稳定平衡>0G点在M点之下,GM>0,MR2、随遇平衡G点与M点重合,GM=0,M=0R3、不稳定平衡<0G点在M点之上,GM<0,MR(二)稳性的定义船舶稳性是指船舶受给定的外力作用后发生倾侧而不致倾覆,当外力消失后仍能回复到原来的平衡位置的能力。
(三)稳性分类分类方法: 按倾斜方向、倾角大小、倾斜力矩性质、船舱是否进水┏破舱稳性稳性┫┏初稳性(小倾角稳性)┃┏横稳性┫┏静稳性┗完整稳性┫┗大倾角稳性┫┗纵稳性┗动稳性其中,倾角小于等于10-15度称为小倾角,否则称为大倾角。
倾斜力矩性质指静力或动力,或者说有无角速度、角加速度。
第二节船舶初稳性(1)(一)船舶初稳性的基本标志1.稳心M 与稳心距基线高度KM船舶小倾角横倾前、后其浮力作用线交点称为横稳心,简称稳心。
稳心M距基线的垂向坐标称为稳心距基线高度。
2.初稳性的衡准指标稳心M至重心G的垂距称为初稳性高度GM。
初稳性高度GM是衡准船舶是否具有初稳性的指标。
初稳性高度大于零,即船舶重心在稳心之下,船舶就有初稳性。
3.初稳性中的假设(对于任一给定的吃水或排水量)(1)小倾角横倾(微倾);(2)在微倾过程中稳心M和重心G的位置固定不变;(3)在微倾过程中浮心B的移动轨迹是一段以稳心为圆心的圆弧;(4)在微倾过程中倾斜轴过漂心。
(二)初稳性高度GM的表达式GM=KB+BM-KG=KM-KG第二节 船舶初稳性(2)(三) 初稳性高度的求取1、 KM 可在静水力曲线图、静水力参数表或载重表中查取。
2、 KG 的计算式中,P i —— 组成船舶总重量(含空船重量等)的第i 项载荷,tZ i —— 载荷P i 的重心距基线高度,m3、Z i 确定(1)舱容曲线图表查取法船舶资料中通常有各个货舱和液舱的舱容曲线图或数据表,利用舱容曲线图表,可方便确定舱内散货或液货的重心高度Z i ,方法如下:i )对于匀质散货或液货,已知货堆表面距基线高度,在图中左纵轴上对应点做水平线交舱容中心距基线高度曲线得B 点,过B 点做垂线交上横轴得C 点,对应值即为该舱货物重心距基线高度Z i 。


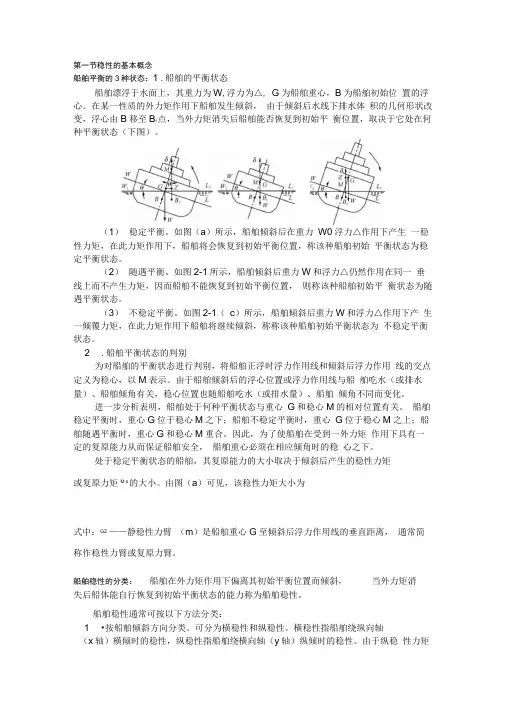
第一节稳性的基本概念船舶平衡的3种状态:1 .船舶的平衡状态船舶漂浮于水面上,其重力为W,浮力为△, G为船舶重心,B为船舶初始位置的浮心。
在某一性质的外力矩作用下船舶发生倾斜,由于倾斜后水线下排水体积的几何形状改变,浮心由B移至B i点,当外力矩消失后船舶能否恢复到初始平衡位置,取决于它处在何种平衡状态(下图)。
(1)稳定平衡。
如图(a)所示,船舶倾斜后在重力W0浮力△作用下产生一稳性力矩,在此力矩作用下,船舶将会恢复到初始平衡位置,称该种船舶初始平衡状态为稳定平衡状态。
(2)随遇平衡。
如图2-1所示,船舶倾斜后重力W和浮力△仍然作用在同一垂线上而不产生力矩,因而船舶不能恢复到初始平衡位置,则称该种船舶初始平衡状态为随遇平衡状态。
(3)不稳定平衡。
如图2-1(c)所示,船舶倾斜后重力W和浮力△作用下产生一倾覆力矩,在此力矩作用下船舶将继续倾斜,称称该种船舶初始平衡状态为不稳定平衡状态。
2 .船舶平衡状态的判别为对船舶的平衡状态进行判别,将船舶正浮时浮力作用线和倾斜后浮力作用线的交点定义为稳心,以M表示。
由于船舶倾斜后的浮心位置或浮力作用线与船舶吃水(或排水量)、船舶倾角有关,稳心位置也随船舶吃水(或排水量)、船舶倾角不同而变化。
进一步分析表明,船舶处于何种平衡状态与重心G和稳心M的相对位置有关。
船舶稳定平衡时,重心G位于稳心M之下;船舶不稳定平衡时,重心G位于稳心M 之上;船舶随遇平衡时,重心G和稳心M重合。
因此,为了使船舶在受到一外力矩作用下具有一定的复原能力从而保证船舶安全,船舶重心必须在相应倾角时的稳心之下。
处于稳定平衡状态的船舶,其复原能力的大小取决于倾斜后产生的稳性力矩或复原力矩M s的大小。
由图(a)可见,该稳性力矩大小为式中:GZ——静稳性力臂(m)是船舶重心G至倾斜后浮力作用线的垂直距离,通常简称作稳性力臂或复原力臂。
船舶稳性的分类:船舶在外力矩作用下偏离其初始平衡位置而倾斜,当外力矩消失后船体能自行恢复到初始平衡状态的能力称为船舶稳性。
第一节 稳性的基本概念船舶平衡的3种状态: 1.船舶的平衡状态船舶漂浮于水面上,其重力为W ,浮力为△,G 为船舶重心,B 为船舶初始位置的浮心。
在某一性质的外力矩作用下船舶发生倾斜,由于倾斜后水线下排水体积的几何形状改变,浮心由B 移至B 1点,当外力矩消失后船舶能否恢复到初始平衡位置,取决于它处在何种平衡状态(下图)。
(1)稳定平衡。
如图(a )所示,船舶倾斜后在重力W 和浮力△作用下产生一稳性力矩,在此力矩作用下,船舶将会恢复到初始平衡位置,称该种船舶初始平衡状态为稳定平衡状态。
(2)随遇平衡。
如图2-1所示,船舶倾斜后重力W 和浮力△仍然作用在同一垂线上而不产生力矩,因而船舶不能恢复到初始平衡位置,则称该种船舶初始平衡状态为随遇平衡状态。
(3)不稳定平衡。
如图2-1(c )所示,船舶倾斜后重力W 和浮力△作用下产生一倾覆力矩,在此力矩作用下船舶将继续倾斜,称称该种船舶初始平衡状态为不稳定平衡状态。
2.船舶平衡状态的判别为对船舶的平衡状态进行判别,将船舶正浮时浮力作用线和倾斜后浮力作用线的交点定义为稳心,以M 表示。
由于船舶倾斜后的浮心位置或浮力作用线与船舶吃水(或排水量)、船舶倾角有关,稳心位置也随船舶吃水(或排水量)、船舶倾角不同而变化。
进一步分析表明,船舶处于何种平衡状态与重心G 和稳心M 的相对位置有关。
船舶稳定平衡时,重心G 位于稳心M 之下;船舶不稳定平衡时,重心G 位于稳心M 之上;船舶随遇平衡时,重心G 和稳心M 重合。
因此,为了使船舶在受到一外力矩作用下具有一定的复原能力从而保证船舶安全,船舶重心必须在相应倾角时的稳心之下。
处于稳定平衡状态的船舶,其复原能力的大小取决于倾斜后产生的稳性力矩或复原力矩s M 的大小。
由图(a )可见,该稳性力矩大小为s M GZ =∆⋅式中:GZ ──静稳性力臂 (m ),是船舶重心G 至倾斜后浮力作用线的垂直距离,通常简称作稳性力臂或复原力臂。